[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу дистанционного управления транспортным средством и устройству дистанционного управления транспортным средством, которые позволяют транспортному средству, имеющему функцию управления автономным движением, осуществлять автономное движение посредством дистанционного управления.
[Уровень техники]
[0002]
Известен способ дистанционного управления транспортным средством (Патентный документ 1). В этом способе вводится жест в сенсорную панель устройства дистанционного управления транспортным средством. Если введенный жест соответствует заданному жесту, транспортному средству позволяется выполнять заданную функцию, назначенную жесту.
[Документ из уровня техники]
[Патентный документ]
[0003]
[Патентный документ 1] US2016/0170494A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
В вышеупомянутом уровне техники предварительно указывается положение ввода жеста относительно сенсорной панели. Следовательно, если положение ввода жеста отклоняется от предварительно указанного положения ввода, жест не определяется как обычный жест, и транспортное средство не может выполнять заданную функцию.
[0005]
Проблема, решаемая настоящим изобретением, состоит в создании способа дистанционного управления и устройства дистанционного управления для транспортного средства, с помощью которого можно вводить жест в произвольном положении на сенсорной панели.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает указанную выше проблему посредством обнаружения положения ввода операции прикосновения на сенсорной панели устройства дистанционного управления и обеспечения возможности изменения области определения жеста в соответствии с положением ввода. Область определения жеста представляет собой область, в которой принимается жест.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению жест можно вводить в произвольном положении на сенсорной панели, и поэтому транспортное средство может выполнять заданную функцию независимо от положения ввода жеста.
[Краткое описание чертежей]
[0008]
Фиг. 1 представляет собой блок-схему, иллюстрирующую систему дистанционной парковки, в которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению.
Фиг. 2 - вид в плане, иллюстрирующий пример дистанционной парковки задним ходом, выполняемой в системе дистанционной парковки по Фиг. 1.
Фиг. 3 - пояснительная схема, иллюстрирующая состояние определения относительного положения блока расширения по Фиг. 1 по отношению к рассматриваемому транспортному средству.
Фиг. 4 - блок-схема, иллюстрирующая конфигурацию устройства дистанционного управления по Фиг. 1.
Фиг. 5A - набор пояснительных схем, каждая из которых иллюстрирует пример командного жеста, который вводится в устройство дистанционного управления по Фиг. 4.
ФИГ. 5B - набор пояснительных схем, каждая из которых иллюстрирует другой пример командного жеста, который вводится в устройство дистанционного управления по Фиг. 4.
ФИГ. 6A - пояснительная схема, иллюстрирующая состояние, в котором на сенсорной панели по Фиг. 4 отображается инструкция по вводу для жеста.
Фиг. 6B - пояснительная схема, иллюстрирующая первую область определения жеста, устанавливаемую на устройстве дистанционного управления по Фиг. 4.
Фиг. 6C - пояснительная схема, иллюстрирующая состояние, в котором жест вводится в первой области определения жеста по Фиг. 6B.
Фиг. 7A и фиг. 7B представляет собой набор графиков, каждый из которых иллюстрирует обнаруженное значение операции прикосновения, обнаруженное на сенсорной панели по Фиг. 4, и скользящее среднее значение обнаруженного значения.
Фиг. 8 - пояснительная схема, иллюстрирующая состояние, в котором область определения жеста устанавливается из жеста, который вводится в произвольном положении на сенсорной панели по Фиг. 4.
Фиг. 9 - пояснительная схема, иллюстрирующая состояние, в котором жест выходит за пределы сенсорной панели по Фиг. 4.
Фиг. 10 - блок-схема, иллюстрирующая пример процедуры управления, выполняемой в системе дистанционной парковки по Фиг. 1.
Фиг. 11 - блок-схема, иллюстрирующая процедуру дистанционного управления по Фиг. 10.
Фиг. 12 - блок-схема, иллюстрирующая процедуру установки области определения жеста, если жест временно не обнаруживается.
Фиг. 13 - блок-схема, иллюстрирующая процедуру дистанционного управления по второму варианту осуществления.
Фиг. 14 - блок-схема, иллюстрирующая процедуру дистанционного управления по третьему варианту осуществления.
Фиг. 15 - блок-схема, иллюстрирующая процедуру дистанционного управления по четвертому варианту осуществления.
ФИГ. 16 - блок-схема, иллюстрирующая процедуру дистанционного управления по пятому варианту осуществления.
[Осуществление изобретения]
[0009]
«Первый вариант осуществления»
Ниже будет описан с обращением к чертежам вариант осуществления настоящего изобретения. Фиг. 1 представляет собой блок-схему, иллюстрирующую систему 1 дистанционной парковки, в которой применяются способ дистанционного управления и устройство дистанционного управления для транспортного средства согласно настоящему изобретению. В настоящем описании «управление автономным движением» относится к управлению транспортным средством для движения посредством автоматического или автономного управления, выполняемого бортовым устройством управления движением, не полагаясь на операции управления со стороны водителя, в то время как «управление автономной парковкой», которое является одним из типов управления автономным движением, относится к управлению транспортным средством для парковки (въезда или выезда с парковочного места или из гаража) с помощью автоматического или автономного управления, выполняемого бортовым устройством управления движением, не полагаясь на операции управления со стороны водителя. Также в настоящем описании «парковка» относится к тому, что транспортное средство непрерывно остановлено на парковочном месте, а термин «маршрут движения» охватывает не только маршрут парковки в случае въезда на парковочное место или в гараж, но также и маршрут для выезда с парковочного места или гаража. В этом смысле «способ управления движением транспортного средства и устройство управления движением транспортного средства, используемые при парковке» охватывают как управление движением транспортного средства во время въезда на парковочное место или в гараж, так и управление движением транспортного средства во время выезда с парковочного места или из гаража. Въезд на парковочное место или в гараж можно просто называть въездом или входом, а выезд из парковочного места или гаража можно просто называть выездом или выходом. В следующих вариантах осуществления конкретные примеры настоящего изобретения будут описаны с обращением к примеру, в котором способ дистанционного управления и устройство дистанционного управления согласно настоящему изобретению применяются в системе дистанционной парковки, в которой осуществляется парковка транспортного средства с дистанционным управлением за счет управления автономным движением. Система 1 дистанционной парковки согласно настоящему варианту осуществления выполняет управление автономным движением в режиме помощи, в котором оператор, такой как водитель, садится в транспортное средство, и возможна операция вмешательства, выполняемая оператором. После этого оператор выходит из транспортного средства и выполняет управление автономным движением извне транспортного средства в режиме дистанционного управления с использованием устройства дистанционного управления.
[0010]
Система 1 дистанционной парковки согласно настоящему варианту осуществления представляет собой систему для выполнения операции въезда или выезда с парковочного места или из гаража посредством управления автономным движением при выполнении упомянутой операции. Более конкретно, водитель выходит из транспортного средства посреди процесса въезда на парковочное место или в гараж и продолжает передавать сигнал команды для выполнения с устройства дистанционного управления, при этом подтверждая безопасность, и таким образом транспортное средство продолжает управление автономной парковкой. Если транспортное средство может столкнуться с препятствием, управление автономной парковкой прекращается путем приостановки передачи сигнала команды для выполнения с устройства дистанционного управления. В нижеследующем описании режим управления автономным движением, в котором оператор, например водитель, садится в транспортное средство и может выполнить операцию вмешательства, будет называться режимом с помощью, а режим управления автономным движением, в котором оператор выходит из транспортного средства и выполняет операцию въезда на парковочное место или в гараж или выезда из них с использованием дистанционного управления, будет называться режимом дистанционного управления.
[0011]
На узком парковочном месте, в котором боковые двери не могут быть полностью открыты, таком как узкий гараж или стоянка, в которых с обеих сторон припаркованы другие транспортные средства, водителю может быть трудно сесть в транспортное средство или выйти из него. Для обеспечения возможности парковки даже в таком случае можно использовать режим дистанционного управления вместе с дистанционным управлением. При выполнении въезда на парковочное место в режиме дистанционного управления после того, как инициирован режим дистанционного управления для вычисления маршрута въезда на выбранное парковочное место и начала управления автономной парковкой водитель выходит из транспортного средства, имея при себе устройство дистанционного управления. Водитель, вышедший из транспортного средства, продолжает передавать транспортному средству сигнал команды для выполнения с устройства дистанционного управления, чтобы завершить въезд на выбранное парковочное место. С другой стороны, при выполнении выезда с парковочного места водитель запускает двигатель внутреннего сгорания или приводной мотор транспортного средства с помощью устройства дистанционного управления, которое водитель имеет при себе, и после того, как инициирован режим дистанционного выезда для вычисления маршрута выезда в выбранное положение выезда и начато управление автономным выездом, водитель продолжает передавать команду выполнения c устройства дистанционного управления для завершения выезда с парковочного места, а затем садится в транспортное средство. Таким образом, система 1 дистанционной парковки согласно настоящему варианту осуществления представляет собой систему, имеющую такой режим дистанционного управления с использованием дистанционного управления. Пример управления автономной парковкой будет проиллюстрирован в виде управления автономной парковкой задним ходом, показанное на фиг. 2, но настоящее изобретение также может применяться к выезду с парковочного места или из гаража, автономной параллельной парковке и другой автономной парковке.
[0012]
Система 1 дистанционной парковки по настоящему варианту осуществления включает в себя устройство 11 установки целевого места парковочного места, детектор 12 положения транспортного средства, детектор 13 объектов, генератор 14 маршрута парковки, вычислитель 15 замедления объекта, контроллер 16 следования по маршруту, генератор 17 целевой скорости транспортного средства, контроллер 18 угла рулевого управления, контроллер 19 скорости транспортного средства, базовый блок 20, устройство 21 дистанционного управления и блок 22 расширения. Устройство 11 установки целевого парковочного места, детектор 12 положения транспортного средства, детектор 13 объектов, генератор 14 маршрута парковки, вычислитель 15 замедления объекта, контроллер 16 следования по маршруту, генератор 17 целевой скорости транспортного средства, контроллер 18 угла рулевого управления, контроллер 19 скорости транспортного средства и базовый блок 20 установлены в транспортном средстве. Устройство 21 дистанционного управления и блок 22 расширения имеет при себе оператор, такой как водитель. Каждая конфигурация будет описана ниже.
[0013]
В режиме дистанционного управления устройство 11 установки целевого парковочного места ищет парковочные места, имеющиеся в окружении рассматриваемого транспортного средства и позволяет оператору выбрать желаемое парковочное место из доступных парковочных мест. Кроме того, устройство 11 установки целевого парковочного места выводит информацию о положении выбранного парковочного места (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 14 маршрута парковки.
[0014]
Для реализации описанных выше функций устройство 11 установки целевого парковочного места включает в себя переключатель ввода, множество камер, детектор парковочного места и дисплей типа сенсорной панели (ни один из которых не проиллюстрирован). Переключатель ввода по выбору выбирает режим дистанционного управления или режим помощи. Множество камер захватывает изображения окружения транспортного средства. Камеры устройства 11 установки целевого парковочного места также могут использоваться в качестве одной или более камер детектора 13 объектов, которые будут описаны позже. Детектор парковочного места представляет собой компьютер, на котором установлено программное обеспечение для поиска доступных парковочных мест на основании данных изображения, захваченного камерами. Дисплей типа сенсорной панели используется для отображения обнаруженных парковочных мест и выбора парковочного места.
[0015]
Когда оператор, такой как водитель, выбирает режим дистанционного управления посредством переключателя ввода, устройство 11 установки целевого парковочного места использует множество камер для получения данных изображения окружения рассматриваемого транспортного средства и анализирует данные изображения для обнаружения доступных парковочных мест. Кроме того, устройство 11 установки целевого парковочного места отображает изображение, включающее в себя доступные парковочные места, на дисплее типа сенсорной панели и предлагает оператору выбрать парковочное место, на котором оператор желает припарковать транспортное средство. Когда оператор выбирает желаемое парковочное место из отображаемых парковочных мест, устройство 11 установки целевого парковочного места выводит информацию о положении этого парковочного места в генератор 14 маршрута парковки. При поиске доступных парковочных мест, когда картографическая информация, хранимая в навигационном устройстве, включает в себя информацию о парковках, содержащую подробную информацию о положении, может быть использована эта информация о парковках.
[0016]
Детектор 12 положения транспортного средства состоит из блока GPS, гиродатчика, датчика скорости транспортного средства и других компонентов. Блок GPS обнаруживает радиоволны, передаваемые от множества спутниковых систем связи, и периодически получает информацию о положении рассматриваемого транспортного средства. Детектор 12 положения транспортного средства определяет текущее положение рассматриваемого транспортного средства на основании информации о положении рассматриваемого транспортного средства, полученной блоком GPS, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация о положении рассматриваемого транспортного средства, обнаруживаемая детектором 12 положения транспортного средства, выводится в генератор 14 маршрута парковки и контроллер 16 следования по маршруту с заданными временными интервалами.
[0017]
Детектор 13 обнаружения объектов выполнен с возможностью выполнения поиска в отношении того, присутствует ли объект, такой как препятствие, в окружении рассматриваемого транспортного средства. Детектор 13 объектов включает в себя одну или более камер, радар (например, радар миллиметрового диапазона, лазерный радар или ультразвуковой радар), сонар или тому подобное, или их сочетание. Камеры, радар, сонар или тому подобное или их сочетание прикреплены к части внешней панели исследуемого транспортного средства. Положение, в котором прикреплен детектор 13 объектов, не ограничено конкретно. Один или более детекторов 13 объектов могут быть прикреплены, например, ко всем или части участков в центре и по обеим сторонам переднего бампера, в центре и по обеим сторонам заднего бампера, к порогам под правой и левой центральными стойками, и к тому подобному.
[0018]
Каждый детектор 13 объектов дополнительно включает в себя компьютер, на котором установлено программное обеспечение для указания положения объекта, обнаруженного камерами, радаром или тому подобным. Этот компьютер выводит указанную информацию об объекте (информацию о целевом объекте) и информацию о его положении (такую как координаты относительного положения относительно текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 14 маршрута парковки и вычислитель 15 замедления объекта. Перед началом управления автономной парковкой указанная информация об объекте и информация о его положении используются генератором 14 маршрута парковки для формирования маршрута парковки. Если во время управления автономной парковкой обнаруживается объект, такой как внезапное препятствие, вычислитель 15 замедления объекта использует информацию об объекте и информацию о его положении для управления замедлением или остановкой рассматриваемого транспортного средства.
[0019]
Генератор 14 маршрута парковки вычисляет маршрут парковки от текущего положения рассматриваемого транспортного средства до целевого положения парковки (здесь и далее маршрут парковки относится к маршруту въезда в случае режима дистанционного управления). Маршрут парковки вычисляется таким образом, чтобы не сталкиваться с каким-либо объектом и не мешать ему. Вычисление маршрута парковки включает в себя использование заранее сохраненного размера рассматриваемого транспортного средства (такого как ширина транспортного средства, длина транспортного средства или минимальный радиус поворота), целевого положения парковки (которое здесь и далее относится к информации о положении парковочного места в случае режима дистанционного управления) от устройства 11 установки целевого парковочного места, текущей информации о положении рассматриваемого транспортного средства от детектора 12 положения транспортного средства, и информации о положении объекта (препятствия) от детектора 13 объектов.
[0020]
Фиг. 2 - вид в плане, иллюстрирующий пример режима дистанционного управления. В текущем положении P1 рассматриваемого транспортного средства V, показанного на Фиг. 2, когда оператор U, такой как водитель, приводит в действие переключатель ввода внутри транспортного средства для выбора режима дистанционного управления, устройство 11 установки целевого парковочного места выполняет поиск доступных парковочных мест TPS и отображает изображение, включающее в себя парковочные места TPS, на дисплее. В ответ на это, когда оператор U выбирает парковочное место TPS, генератор 14 маршрута парковки вычисляет маршрут R1 парковки от текущего положения P1 до положения P3 поворота для парковки и маршрут R2 парковки от положения P3 поворота для парковки до парковочного места TPS, которое является целью. Затем генератор 14 маршрута парковки выводит эту серию маршрутов R1 и R2 парковки на контроллер 16 следования по маршруту и в генератор 17 целевой скорости транспортного средства.
[0021]
Вычислитель 15 замедления объекта принимает информацию о положении препятствий и других объектов от детектора 13 объектов и вычисляет время столкновения рассматриваемого транспортного средства с объектом (TTC: Время до столкновения) на основании расстояния от объекта и скорости транспортного средства, таким образом вычисляя время начала замедления рассматриваемого транспортного средства. Например, в режиме дистанционного управления, показанном на Фиг. 2, объекты в качестве препятствий включают в себя стену W на правой стороне дороги в положении P3 поворота для парковки, дома H1 и H2 как с правой, так и с левой стороны маршрута R2 парковки до целевого парковочного места TPS и садовые деревья WD. При определении того, что расстояние до такого препятствия составляет заданное значение или более, вычислитель 15 замедления объекта устанавливает скорость транспортного средства на начальное заданное значение и замедляет рассматриваемое транспортное средство V в тот момент времени, когда время TTC до столкновения рассматриваемого транспортного средства V для с препятствием принимает заданное значение или менее. Аналогичным образом, если на маршруте R1 или R2 парковки обнаружено внезапное препятствие во время выполнения последовательного управления автономной парковкой, проиллюстрированного на Фиг. 2, рассматриваемое транспортное средство V замедляется или останавливается в момент времени, когда время TTC до столкновения рассматриваемого транспортного средства V с препятствием принимает заданное значение или менее. Этот момент времени замедления выводится в генератор 17 скорости транспортного средства.
[0022]
Контроллер 16 следования по маршруту вычисляет через заданные интервалы времени целевой угол рулевого управления для того, чтобы рассматриваемое транспортное средство следовало маршрутам парковки, на основании маршрутов парковки от генератора 14 маршрутов парковки и текущего положения рассматриваемого транспортного средства от детектора 12 положения транспортного средства. Что касается маршрутов R1 и R2 парковки на Фиг. 2, контроллер 16 следования по маршруту вычисляет через заданный интервал времени для каждого текущего положения рассматриваемого транспортного средства V целевой угол рулевого управления по маршруту R1 парковки для движения прямо вперед и поворота направо из текущего положения P1 в положение P3 поворота для парковки. Аналогичным образом, контроллер 16 следования по маршруту вычисляет через заданный интервал времени для каждого текущего положения рассматриваемого транспортного средства V целевой угол рулевого управления по маршруту R2 парковки для поворота налево и движения прямо вперед из положения P3 поворота для парковки к парковочное место TPS. Контроллер 16 следования по маршруту выводит вычисленные целевые углы рулевого управления на контроллер 18 угла рулевого управления.
[0023]
Генератор 17 целевой скорости транспортного средства вычисляет через заданные интервалы времени целевую скорость транспортного средства для следования рассматриваемого транспортного средства V по маршрутам парковки на основании маршрутов парковки от генератора 14 маршрутов парковки и времени начала замедления от вычислителя 15 замедления объекта. Что касается маршрутов R1 и R2 въезда на Фиг. 2, генератор 17 целевой скорости транспортного средства вычисляет через заданный интервал времени для каждого текущего положения рассматриваемого транспортного средства V целевую скорость транспортного средства при начале движения из текущего положения P1, движении прямо вперед и повороте направо и остановке в положении P3 поворота для парковки и выдает вычисленную целевую скорость транспортного средства на контроллер 19 скорости транспортного средства. Аналогичным образом, генератор 17 целевой скорости транспортного средства вычисляет через заданный интервал времени для каждого текущего положения рассматриваемого транспортного средства V целевую скорость транспортного средства при повторном начале движения (движения назад) из положения P3 поворота для парковки и повороте налево на пути к целевому парковочному месту TPS и целевую скорость транспортного средства при приближении к целевому парковочному месту TPS и остановке там, и выводит вычисленные целевые скорости транспортного средства в контроллер 19 скорости транспортного средства. Если на маршруте R1 или R2 парковки обнаруживается внезапное препятствие во время выполнения последовательного управления автономной парковкой, проиллюстрированного на Фиг. 2, из вычислителя 15 замедления объекта выводится момент времени замедления или остановки, и таким образом генератор 17 целевой скорости транспортного средства выводит целевую скорость транспортного средства на контроллер 19 скорости транспортного средства в соответствии с этим моментом времени.
[0024]
Контроллер 18 угла рулевого управления формирует управляющий сигнал для приведения в действие исполнительного механизма рулевого управления, предусмотренного в системе рулевого управления рассматриваемого транспортного средства V, на основании целевого угла рулевого управления от контроллера 16 следования по маршруту. Контроллер 19 скорости транспортного средства также формирует управляющий сигнал для приведения в действие исполнительного механизма акселератора, предусмотренного в системе привода рассматриваемого транспортного средства V, на основании целевой скорости транспортного средства от генератора 17 целевой скорости транспортного средства. Управление контроллером 18 угла рулевого управления и контроллером 19 скорости транспортного средства осуществляется одновременно, чтобы таким образом выполнять управление автономной парковкой.
[0025]
Далее будут описаны блок 22 расширения и базовый блок 20. Международный стандарт для управления автономным движением транспортного средства определяет условие для разрешения дистанционного управления транспортным средством, при котором расстояние между транспортным средством и оператором находится в пределах заданного расстояния дистанционного управления (например, в пределах 6 м). Таким образом, в системе 1 дистанционной парковки по настоящему варианту осуществления блок 22 расширения, который имеет при себе оператор U, и базовый блок 20, установленный в рассматриваемом транспортном средстве V, используются для определения относительного положения блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительное положение оператора U, который имеет при себе блок 22 расширения, по отношению к рассматриваемому транспортному средству V. Блок 22 расширения и базовый блок 20 составляют так называемую систему бесключевого доступа. Система бесключевого доступа представляет собой систему, выполненную таким образом, что, когда оператор U, такой как водитель, приближается к рассматриваемому транспортному средству V на заданное расстояние в состоянии, когда он имеет при себе блок 22 расширения, между базовым блоком 20, установленным в рассматриваемом транспортном средстве V и блоком 22 расширения устанавливается беспроводная связь для автоматического отпирания дверного замка или тому подобного.
[0026]
В настоящем варианте осуществления, как показано на Фиг. 3, например, антенны 202a-202d, соединенные с базовым блоком 20, установлены в заданных местах рассматриваемого транспортного средства V. Базовый блок 20 передает сигналы поиска блока расширения от антенн 202a-202d. При приближении к рассматриваемому транспортному средству V на заданное расстояние блок 22 расширения принимает сигналы поиска блока расширения, передаваемые с антенн 202a-202d, и измеряет интенсивность радиополя сигнала поиска блока расширения от каждой из антенн 202a-202d. Интенсивность радиополя сигнала поиска блока расширения изменяется в зависимости от расстояния между блоком 22 расширения и каждой из антенн 202a-202d. То есть, если блок 22 расширения находится рядом с антенной 202b вблизи левой стороны переднего бампера, интенсивность радиополя сигнала поиска блока расширения, принимаемого от антенны 202b, является наиболее высокой, в то время как интенсивность радиополя сигнала поиска блока расширения, принимаемого от антенны 202c в районе правой стороны заднего бампера, является наименьшей.
[0027]
Блок 22 расширения передает измеренную интенсивность радиополя сигнала поиска блока расширения от каждой из антенн 202a-202d на базовый блок 20. Базовый блок 20 имеет детектор 201 положения, который представляет собой, например, компьютер, на котором установлено программное обеспечение для вычисления положения блока 22 расширения на основании значений интенсивности радиополя для антенн 202a-202d, принимаемых от блока 22 расширения, например, путем использования способа триангуляции. На основании интенсивностей радиополя для антенн 202a-202d, принимаемых от блока 22 расширения, детектор 201 положения определяет относительное положение блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительное положение оператора U, который имеет при себе блок 22 расширения, по отношению к рассматриваемому транспортному средству V. Детектор 201 положения выводит обнаруженное относительное положение блока 22 расширения в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства (в качестве альтернативы, это могут быть контроллер 18 угла рулевого управления и контроллер 19 скорости транспортного средства) и передает обнаруженное относительное положение блока 22 расширения на устройство 21 дистанционного управления.
[0028]
Устройство 21 дистанционного управления представляет собой устройство для подачи оператором команд U может извне транспортного средства в отношении того, следует ли продолжить или прекратить выполнение управления автономной парковкой, которое устанавливается устройством 11 установки целевого парковочного места. Таким образом, устройство 21 дистанционного управления имеет функцию беспроводной связи для передачи сигнала команды для выполнения на контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства (в качестве альтернативы, это могут быть контроллер 18 угла рулевого управления и контроллер 19 скорости транспортного средства) и осуществляет связь с функцией беспроводной связи рассматриваемого транспортного средства V.
[0029]
Устройство 21 дистанционного управления предусмотрено, например, в виде мобильного информационного терминала, такого как смартфон, на котором установлено прикладное программное обеспечение для дистанционного управления (далее называемое приложением). Смартфон, на котором установлено приложение, служит устройством 21 дистанционного управления системой 1 дистанционной парковки путем приведения в действие приложения.
[0030]
Международный стандарт управления автономным движением транспортного средства определяет, что транспортному средству разрешается выполнять управление автономным движением только в то время, когда оператор непрерывно управляет устройством дистанционного управления. Следовательно, в системе 1 дистанционной парковки по настоящему варианту осуществления сигнал команды для выполнения продолжает передаваться от устройства 21 дистанционного управления к рассматриваемому транспортному средству V только в то время, когда в сенсорную панель 211 устройства 21 дистанционного управления непрерывно вводится заданный командный жест. Рассматриваемое транспортное средство V выполняет управление автономной парковкой только при приеме сигнала команды для выполнения, передаваемого от устройства 21 дистанционного управления. То есть, если ввод командного жеста в устройство 21 дистанционного управления прекращается, сигнал команды для выполнения перестает передаваться от устройства 21 дистанционного управления к транспортному средству, и выполнение управления автономной парковкой транспортного средства приостанавливается или прекращается. Для управления транспортным средством, припаркованным на узком парковочном месте, чтобы оно покинуло парковочное место с использованием дистанционного управления извне транспортного средства, устройство 21 дистанционного управления дополнительно имеет функцию активации источника привода, такого как двигатель или мотор транспортного средства, посредством дистанционного управления.
[0031]
Как показано на Фиг. 4, устройство 21 дистанционного управления включает в себя сенсорную панель 211, блок 212 определения жеста, блок 213 хранения, командный блок 214 и блок 215 связи. Сенсорная панель 211 обнаруживает операцию прикосновения, выполняемую оператором U. Блок 212 определения жеста устанавливает область определения жеста на сенсорной панели 211. Область определения жеста представляет собой область, в которой принимается ввод жеста. Кроме того, блок 212 определения жеста обнаруживает жест из области определения жеста и определяет, является ли обнаруженный жест заранее установленным командным жестом и находится ли скорость ввода жеста в пределах заданного диапазона. Блок 213 хранения хранит различные элементы информации, относящиеся к определению жеста, сделанному блоком 212 определения жеста. Если определено, что обнаруженный жест является командным жестом и скорость ввода жеста находится в пределах заданного диапазона, командный блок 214 формирует сигнал команды для выполнения, чтобы рассматриваемое транспортное средство V выполнило управление автономной парковкой с использованием функции управления автономным движением. Блок 215 связи передает сигнал команды для выполнения, сформированный в командном блоке 214, на рассматриваемое транспортное средство V.
[0032]
Ниже будет описана каждая часть устройства 21 дистанционного управления. В качестве сенсорной панели 211 используется сенсорный дисплей смартфона, который служит устройством 21 дистанционного управления. Жест, вводимый в режиме дистанционного управления, представляет собой указанный командный жест, который предварительно определен. Форма и размер указанного командного жеста сохраняются в блоке 213 хранения устройства 21 дистанционного управления вместе с приложением. Если поперечное направление и продольное направление сенсорной панели 211, соответственно, определяются как ось X и ось Y, например командный жест относится к операции прикосновения, при которой координаты положения ввода при операции прикосновения непрерывно изменяются по меньшей мере по одной из оси X и оси Y. В примерах, показанных на Фиг. 5A (A), (B) и (C), командный жест может быть жестом G1 скольжения пальца в продольном направлении по сенсорной панели 211, жестом G2 скольжения пальца в поперечном направлении по сенсорной панели 211, или жестом G3 скольжения пальца по диагонали на сенсорной панели 211.
[0033]
Монотонный жест линейного скольжения пальца может быть ошибочно определен как операция ввода, отличная от командного жеста. Кроме того, когда какой-либо предмет касается сенсорной панели 211 и перемещается, это может быть определено как командный жест. Чтобы предотвратить такое ошибочное определение командного жеста, командный жест может быть определен, например, в виде сенсорной операции рисования траектории замкнутой фигуры на сенсорной панели таким образом, что начальная точка, в которой начинается один ввод жеста, и конечная точка, в которой заканчивается один ввод жеста, накладываются друг на друга. Такая замкнутая фигура может быть получена с использованием жеста G4 для рисования круглой фигуры, как показано на фиг. 5B (A), или с использованием жеста G5 или G6 для рисования треугольника или четырехугольника, как показано на фиг. 5B (B) или (C), или другого многоугольника. В качестве дополнения или альтернативы, как показано на фиг. 5B (D), можно использовать жест G7 для рисования фигуры, такой как восьмерка, и тому подобное. На Фиг. 5B заштрихованная часть указывает в качестве примера начальную точку и конечную точку жеста. В настоящем варианте осуществления в качестве указанного командного жеста используется жест G4 для рисования круглой фигуры, показанный на фиг. 5B (A).
[0034]
Поскольку центральный процессор (CPU) смартфона, который служит в качестве устройства 21 дистанционного управления, работает в соответствии с приложением, действует блок 212 определения жеста. Блок 212 определения жеста устанавливает область определения жеста в ответ на положение ввода операции прикосновения, выполняемой оператором U на сенсорной панели 211. Кроме того, блок 212 определения жеста изменяет размер области определения жеста относительно сенсорной панели 211. То есть положение и размер области определения жеста, которая установлена на сенсорной панели 211, являются изменяемыми в соответствии с положением ввода операции прикосновения и, следовательно, указанный командный жест может быть введен с произвольным размером в произвольном положении на сенсорной панели 211. Посредством этой операции можно предотвратить остановку управления автономной парковкой рассматриваемого транспортного средства V из-за ошибки ввода командного жеста по сравнению с уровнем техники, в котором положение ввода и размер ввода жеста фиксированы во все моменты времени.
[0035]
При начале ввода жеста, как показано на Фиг. 6A, блок 212 определения жеста обращается к заранее установленному положению на сенсорной панели 211, например, к центральному положению Ip0 (координаты x0, y0), для отображения указателя 212a ввода, указывающего форму командного жеста G4, имеющего указанный размер. Рядом с указателем 212a ввода отображается такое сообщение, как «Пожалуйста, выполните операцию прикосновения к отображаемому указателю ввода вдоль направления стрелки».
[0036]
При начале ввода жеста блок 212 определения жеста устанавливает первую область Ga0 определения жеста в заранее установленное положение на сенсорной панели 211 независимо от положения ввода операции прикосновения по отношению к сенсорной панели 211. В частности, как показано на Фиг. 6B, блок 212 определения жеста устанавливает первую область Ga0 определения жеста, соответствующую указателю 212a ввода, обращаясь к центральному положению Ip0 указателя 212a ввода. Если направление ширины и продольное направление сенсорной панели 211 представляют собой ось X и ось Y, соответственно, первая область Ga0 определения жеста определяется координатами центра (x0, y0) заданного центрального положения Ip0 и радиусом R. Радиус R имеет диапазон, определяемый минимальным размером ввода rmin и максимальным размером ввода rmax. Как показано на Фиг. 6B в виде пунктирных линий, минимальный размер ввода rmin получается путем уменьшения радиуса r командного жеста G4, имеющего указанный размер, с заданным соотношением (например, 30%), а максимальный размер ввода rmax получается путем увеличения радиуса r с заданным соотношением (например, 150%). Что касается указанного размера командного жеста G4, значение, соответствующее размеру и разрешению сенсорной панели 211, заранее сохранено в блоке 213 хранения. Блок 212 определения жеста устанавливает указанный размер командного жеста G4, минимальный размер ввода и максимальный размер ввода на основании размера и разрешения сенсорной панели 211 смартфона, на котором установлено приложение.
[0037]
Причина, по которой при начале ввода жеста отображается указатель 212a ввода и временно фиксируется первая область Ga0 определения жеста, как указано выше, состоит в том, что оператор U должен быть уведомлен о форме командного жеста G4 для увеличения скорости определения жеста сразу после начала ввода. Кроме того, при начале дистанционного управления рассматриваемым транспортным средством V оператор U, вероятно, будет смотреть на устройство 21 дистанционного управления для управления устройством 21 дистанционного управления. Соответственно, отображая указатель 212a ввода в заранее установленном положении для установки первой области Ga0 определения жеста, можно предложить операцию, необходимую для оператора U, и, таким образом, уменьшить ощущение дискомфорта, вызываемое у оператора U. Напротив, после начала управления автономной парковкой рассматриваемого транспортного средства V оператор U, вероятно, будет смотреть в сторону от устройства 21 дистанционного управления, чтобы контролировать рассматриваемое транспортное средство V. Таким образом, весьма вероятно, что операция прикосновения будет отклоняться от первой области Ga0 определения жеста; поэтому при установке новой области определения жеста в соответствии с положением ввода операции прикосновения управление автономным движением рассматриваемого транспортного средства V может быть продолжено. Причина, по которой первая область Ga0 определения жеста определяется минимальным размером ввода rmin и максимальным размером ввода rmax, состоит в том, чтобы определить, что вводимый жест является командным жестом, не только когда вводимый жест имеет тот же размер, что и размер командного жеста G4, имеющего указанный размер, но также и когда вводимый жест имеет размер в пределах заданного диапазона, то есть когда размер вводимого жеста меньше или больше указанного размера.
[0038]
Блок 212 определения жеста определяет, является ли вводимый жест круговым жестом, таким как указанный командный жест G4, и попадает ли размер вводимого жеста в первую область Ga0 определения жеста. Кроме того, блок 212 определения жеста определяет, находится ли скорость ввода жеста в заранее установленном заданном диапазоне. Если вводимый жест представляет собой жест круглой формы, такой как командный жест G4, размер вводимого жеста находится в пределах области Ga0 определения первого жеста, а скорость ввода жеста находится в пределах заданного диапазона, блок 212 определения жеста определяет, что введен командный жест G4. Таким образом, как проиллюстрировано на Фиг. 6C, даже когда вводимый жест G4a изгибается в первой области Ga0 определения жеста и имеет деформированную форму, такую как деформированная эллиптическая форма, блок 212 определения жеста определяет, что это командный жест G4. Причина, по которой скорость ввода жеста используется для определения командного жеста, состоит в том, чтобы отличить жест, который вводится из-за касания каким-либо предметом сенсорной панели 211, от жеста оператора U.
[0039]
Блок 212 определения жеста скрывает указатель 212a ввода в момент времени, когда определено, что жест ввода является командным жестом G4, или в момент времени, когда установлена новая область определения жеста в соответствии с изменением положения ввода жеста. При обнаружении того, что командный жест продолжает вводиться по указателю 212a ввода, блок 212 определения жеста может продолжать отображать указатель 212a ввода. Если установлена новая область определения жеста, блок 212 определения жеста может отображать указатель 212a ввода в положении новой области определения жеста.
[0040]
Ввод жеста на сенсорной панели 211 выполняется оператором U посредством операции прикосновения, поэтому положение ввода жеста все время перемещается. Поэтому блок 212 определения жеста устанавливает новую область определения жеста в соответствии с перемещением положения ввода жеста относительно сенсорной панели 211. Также, если оператор U, который заранее понимает, что положение ввода и размер ввода жеста являются изменяемыми, вводит жест, игнорируя указатель 212a ввода, блок 212 определения жеста устанавливает новую область определения жеста в соответствии с положением ввода. Для установки новой области определения жеста используются обнаруженные значения xraw и yraw операции прикосновения, обнаруженные сенсорной панелью 211, и скользящие средние значения xmean и ymean обнаруженных значений.
[0041]
Каждый из графиков Фиг. 7A и Фиг. 7B иллюстрирует пример обнаруженного значения операции прикосновения, обнаруженной сенсорной панелью 211, когда оператор U вводит жест на сенсорной панели 211. На графике по Фиг. 7A горизонтальная ось представляет время, а вертикальная ось представляет обнаруженное значение xraw операции прикосновения в направлении оси X и скользящее среднее значение xmean обнаруженного значения xraw. Положительная сторона вертикальной оси на графике по Фиг. 7A указывает правую сторону центральной линии по оси X сенсорной панели 211, тогда как отрицательная сторона указывает левую сторону центральной линии по оси X. Аналогичным образом, на графике по Фиг. 7B горизонтальная ось представляет время, а вертикальная ось представляет обнаруженное значение yraw операции прикосновения в направлении оси Y и скользящее среднее значение ymean обнаруженного значения yraw. Положительная сторона вертикальной оси на графике по Фиг. 7B указывает верхнюю сторону центральной линии по оси Y сенсорной панели 211, в то время как отрицательная сторона указывает нижнюю сторону центральной линии по оси Y. Обнаруженные значения xraw и yraw для сенсорной панели 211 сохраняются в блоке 213 хранения в любой момент времени. Значения скользящего среднего xmean и ymean вычисляются блоком 212 определения жеста и сохраняются в блоке 213 хранения.
[0042]
Как показано на Фиг. 8, например, когда жест G4b вводится оператором U на сенсорной панели 211 посредством операции прикосновения, блок 212 определения жеста получает от блока 213 хранения координаты (xb, yb) текущего положения Tp1 прикосновения оператора U по отношению к сенсорной панели 211. Блок 212 определения жеста также получает из блока 213 хранения скользящие средние значения (xmean, ymean) за последние несколько секунд (далее называемые временем T определения радиуса) до тех пор, пока положение прикосновения не достигнет Tp1. Используя следующие математические формулы 1 и 2, блок 212 определения жеста вычисляет радиус rb жеста G4b до тех пор, пока положение прикосновения не переместится в Tp1, и угол θ, образованный между осью X и линией, которая включает в себя положение Tp1 прикосновения и центральное положение Ip1. Затем блок 212 определения жеста вычисляет координаты (X1, Y1) центрального положения Ip1 жеста G4b на основании радиуса rb и угла θ и устанавливает новую область Ga1 определения жеста на основании центрального положения Ip1. Таким образом, блок 212 определения жеста всегда устанавливает новую область определения жеста в соответствии с перемещением положения ввода жеста.
[0043]
[Математическая формула 1]

[0044]
[Математическая формула 2]

[0045]
Жест может временно стать необнаружимым блоком 212 определения жеста во время ввода жеста на сенсорной панели 211. Случаи, в которых жест становится необнаружимым блоком 212 определения жеста, включают в себя случай, когда палец оператора U освобождается от сенсорной панели 211, случай, когда жест ввода не определяется как командный жест, и случай, когда оператор U заканчивает ввод жеста посреди ввода. Примеры случая, когда палец оператора U отпускает сенсорную панель 211, включают случай, когда палец оператора U выпадает за пределы сенсорной панели 211. Когда жест становится необнаружимым во время ввода жеста на сенсорной панели 211, блок 212 определения жеста переключает процесс настройки для области определения жеста в зависимости от времени, в течение которого жест не может быть обнаружен (время отсутствия обнаружения), и описанное выше время определения радиуса T.
[0046]
Например, когда палец оператора U временно отпускает сенсорную панель 211 во время ввода жеста и блок 212 определения жеста не может обнаружить этот жест, или когда палец оператора U выходит за пределы сенсорной панели 211 и блок 212 определения жеста не может обнаружить жест, время отсутствия обнаружения считается относительно коротким. Таким образом, блок 212 определения жеста сравнивает время отсутствия обнаружения со временем определения радиуса T. При определении того, что время отсутствия обнаружения меньше времени определения радиуса T, блок 212 определения жеста вычисляет скользящее среднее значение, используя координаты положения прикосновения, обнаруженного непосредственно перед тем, как жест временно становится необнаружимым, и устанавливает новую область определения жеста, используя результат вычисления. То есть блок 212 определения жеста устанавливает новую область определения жеста без использования положения прикосновения в течение времени отсутствия обнаружения. Например, в примере, показанном на Фиг. 9, когда обнаружено, что палец оператора U временно выходит за пределы сенсорной панели 211 во время ввода жеста, блок 212 определения жеста вычисляет скользящее среднее значение, используя координаты положения прикосновения непосредственно перед тем, как палец выйдет за пределы сенсорной панели 211, и устанавливает новую область Ga2 определения жеста, используя результат вычисления. В случае, если время отсутствия обнаружения жеста меньше времени определения радиуса T, даже если новая область определения жеста установлена без использования положения прикосновения в течение времени отсутствия обнаружения, установленное положение области определения жеста существенно не отклоняется. Следовательно, это не оказывает существенного влияния на результат определения жеста.
[0047]
Если блок 212 определения жеста не определяет, что вводимый жест является командным жестом, из-за ошибки ввода со стороны оператора U, время отсутствия обнаружения жеста считается относительно большим по сравнению с тем, когда палец освобождается от сенсорная панель 211. Следовательно, при определении того, что время отсутствия обнаружения жеста не короче, чем время определения радиуса T, блок 212 определения жеста сохраняет область определения жеста, которая установлена непосредственно перед тем, как жест становится необнаружимым, в качестве второй области определения жеста в блоке 213 хранения. Затем при повторном обнаружении ввода жеста блок 212 определения жеста считывает вторую область определения жеста из блока 213 хранения, чтобы определить жест. Например, в примере, показанном на Фиг. 9, блок 212 определения жеста сохраняет в блоке 213 хранения область Ga2 определения жеста, которая установлена непосредственно перед тем, как жест G4c становится необнаружимым, в качестве второй области определения жеста. Затем при повторном обнаружении ввода жеста блок 212 определения жеста считывает область Ga2 определения жеста из блока 213 хранения, чтобы определить жест. Если оператор U непрерывно вводит жест, весьма вероятно, что оператор U продолжит ввод в том же положении ввода. Следовательно, если жест становится необнаружимым из-за ошибки ввода, скорость определения жеста может быть увеличена путем использования области определения жеста, которая установлена непосредственно перед тем, как жест становится необнаружимым.
[0048]
Если оператор U заканчивает ввод жеста посреди ввода, время отсутствия обнаружения жеста считается более длительным, чем в случае, если палец отпускает сенсорную панель 211 или если вводимый жест не определен как представляющий собой командный жест. Следовательно, при определении того, что время отсутствия обнаружения жеста не меньше заранее установленного времени ожидания повторного начала ввода, блок 212 определения жеста отображает указатель 212a ввода на сенсорной панели 211 и устанавливает первую область Ga0 определения жеста на основе заранее установленного центрального положения Ip0. Время ожидания повторного начала ввода больше, чем время определения радиуса T, и предпочтительно устанавливается, например, на время в несколько секунд. Если время отсутствия обнаружения жеста становится до некоторой степени длительным, скорость определения повторно начатого жеста может быть увеличена путем отображения указателя 212a ввода и установки первой области Ga0 определения жеста.
[0049]
Далее будут описаны командный блок 214 и блок 215 связи устройства 21 дистанционного управления. Если блок 212 определения жеста определяет, что жест, обнаруженный на сенсорной панели 211, является командным жестом G4, командный блок 214 формирует сигнал команды для выполнения для управления рассматриваемым транспортным средством V для выполнения управления автономной парковкой с использованием функции управления автономным движением. Командный блок 214 вводит сформированный сигнал команды для выполнения в блок 215 связи. Командный блок 214 функционирует так, как работает в соответствии с приложением CPU смартфона, который служит в качестве устройства 21 дистанционного управления.
[0050]
Блок 215 связи использует функцию связи, которая заранее предусмотрена в смартфоне, который служит в качестве устройства 21 дистанционного управления. Блок 215 связи представляет собой, например, блок беспроводной связи, такой как блок для Bluetooth (зарегистрированный товарный знак). В режиме дистанционного управления блок 215 связи соединен с блоком беспроводной связи (не показан), установленным в рассматриваемом транспортном средстве V, и передает сигнал команды для выполнения в рассматриваемое транспортное средство V. Также в качестве блока 215 связи может использоваться беспроводная локальная сеть (LAN), такая как Wi-Fi (зарегистрированный товарный знак), линия мобильной телефонной связи или тому подобное.
[0051]
Как показано на Фиг. 1, сигнал команды для выполнения, передаваемый в рассматриваемое транспортное средство V, вводится в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства. Как описано выше, относительное положение между рассматриваемым транспортным средством V и блоком 22 расширения вводится из детектора 201 положения в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства. Если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного управления и вводится сигнал команды для выполнения от устройства 21 дистанционного управления, контроллер 16 следования по маршруту выводит целевой угол рулевого управления в контроллер 18 угла рулевого управления. Аналогичным образом, если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного управления и вводится сигнал команды для выполнения от устройства 21 дистанционного управления, генератор 17 целевой скорости транспортного средства выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства. На основании целевого угла рулевого управления от контроллера 16 следования по маршруту контроллер 18 угла рулевого управления формирует управляющий сигнал для приведения в действие исполнительного механизма рулевого управления, предусмотренного в системе рулевого управления рассматриваемого транспортного средства. На основании целевой скорости транспортного средства от генератора 17 целевой скорости транспортного средства контроллер 19 скорости транспортного средства формирует управляющий сигнал для приведения в действие исполнительного механизма акселератора, предусмотренного в системе привода рассматриваемого транспортного средства V.
[0052]
В случае, если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения больше, чем расстояние дистанционного управления, контроллер 16 следования по маршруту не выводит целевой угол рулевого управления в контроллер 18 угла рулевого управления, даже если вводится сигнал команды для выполнения от устройства 21 дистанционного управления. Аналогичным образом, в случае, если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения больше, чем расстояние дистанционного управления, генератор 17 целевой скорости транспортного средства не выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства, даже если вводится выполнение сигнал команды для выполнения от устройства 21 дистанционного управления. То есть в случае, если расстояние между рассматриваемым транспортным средством V и устройством 22 расширения больше, чем расстояние дистанционного управления, управление автономной парковкой не выполняется, даже если вводится командный жест с устройства 21 дистационного управления.
[0053]
Далее с обращением к Фиг. 10, 11 и 12 будет описана последовательность операций управления системой 1 дистанционной парковки согласно настоящему варианту осуществления. Здесь будет описана ситуация, в которой системой управления автономной парковкой выполняется парковка задним ходом, показанная на Фиг. 2. Фиг. 10 является блок-схемой, иллюстрирующей процедуру управления, выполняемую в системе 1 дистанционной парковки согласно настоящему варианту осуществления. Фиг. 11 является блок-схемой, иллюстрирующей процедуру в устройстве 21 дистанционного управления по обнаружению и определению жеста и передаче сигнала команды для выполнения. Фиг. 12 - блок-схема, иллюстрирующая процедуру установки области определения жеста, если обнаружен ввод жеста после того, как жест временно становится необнаружимым.
[0054]
Сначала, когда рассматриваемое транспортное средство V прибывает в положение P1 вблизи целевого парковочного места TPS, на этапе S1, проиллюстрированном на Фиг. 10, оператор U, такой как водитель, включает переключатель начала дистанционной парковки бортового устройства 11 установки целевого парковочного места, чтобы выбрать режим дистанционного въезда. На этапе S2 устройство 11 установки целевого парковочного места осуществляет поиск одного или более доступных парковочных мест для рассматриваемого транспортного средства V, используя множество бортовых камер или тому подобное. На этапе S3 устройство 11 установки целевого парковочного места определяет, имеется ли одно или более доступных парковочных мест. Если имеется одно или более доступных парковочных мест, процесс переходит к этапу S4, а если никаких доступных парковочных мест не имеется, процесс возвращается к этапу S1. Если на этапе S2 не обнаружены доступные парковочные места, оператор может быть проинформирован об этом факте с помощью языкового отображения или голоса, например, «парковочные места отсутствуют», и этот процесс может быть завершен.
[0055]
На этапе S4 устройство 11 установки целевого парковочного места управляет бортовым дисплеем для отображения доступных парковочных мест и предлагает оператору U выбрать желаемое парковочное место. Когда оператор U выбирает конкретное парковочное место TPS, устройство 11 установки целевого парковочного места выводит информацию о целевом положении парковки в генератор 14 маршрута парковки. На этапе S5 генератор 14 маршрута парковки формирует маршруты R1 и R2 парковки, показанные на Фиг. 2, из текущего положения P1 рассматриваемого транспортного средства V и парковочного места TPS, которое представляет целевое положение парковки. Вычислитель 15 замедления объекта вычисляет момент начала замедления при управлении автономной парковкой на основании информации об объекте, обнаруженном детектором 13 объектов. Маршруты R1 и R2 парковки, сформированные генератором 14 маршрутов парковки, выводятся на контроллер 16 следования по маршруту, а время начала замедления, вычисленное вычислителем 15 замедления объекта, выводится на генератор 17 целевой скорости транспортного средства.
[0056]
Посредством вышеупомянутых процессов управление автономной парковкой переходит в состояние ожидания; поэтому, когда оператору U предлагается принять начало управления автономной парковкой, а затем он принимает начало на этапе S6, начинается управление автономным движением в режиме помощи. При парковке задним ходом, показанной на Фиг. 2, когда рассматриваемое транспортное средство V движется вперед, поворачивая направо из текущего положения P1, проиллюстрированного на Фиг. 2, и достигает положения P3 поворота для парковки, рассматриваемое транспортное средство V движется назад, поворачивая налево в положение P4 промежуточной остановки.
[0057]
На этапе S7, когда положение рассматриваемого транспортного средства V достигает положения P4 промежуточной остановки, рассматриваемое транспортное средство V останавливается, и оператору U предлагается выйти из рассматриваемого транспортного средства V. Когда оператору U предлагается выйти из рассматриваемого транспортного средства V на этапе S7 и он выходит с устройством 21 дистанционного управления, за этапом S7 следует этап S8, на котором оператор U активирует устройство 21 дистанционного управления. Это начинает дистанционное управление. Примеры ввода для начала дистанционного управления посредством устройства 21 дистанционного управления включают в себя активацию приложения, установленного в устройстве 21 дистанционного управления, операцию разблокировки дверей, операцию блокировки/разблокировки дверей и их сочетание и активацию приложения. Рассматриваемое транспортное средство V находится в состоянии остановки в ходе этапов S7 - S9.
[0058]
На этапе S9 выполняется процесс сопряжения между устройством 21 дистанционного управления и рассматриваемым транспортным средством V. Если процесс сопряжения на этапе S9 позволяет рассматриваемому транспортному средству V аутентифицировать устройство 21 дистанционного управления таким образом, чтобы команда могла быть принята, на этапе S10 начинается дистанционное управление.
[0059]
В начале дистанционного управления с использованием устройства 21 дистанционного управления, как проиллюстрировано на Фиг. 11, блок 212 определения жеста выполняет начальную установку на этапе S101. При этой начальной установке, как показано на Фиг. 6A, на сенсорной панели 211 отображаются указатель 212a ввода и сообщение «Выполните операцию прикосновения к отображаемому указателю ввода вдоль направления стрелки». Кроме того, как проиллюстрировано на Фиг. 6B, блок 212 определения жеста устанавливает первую область Ga0 определения жеста на основании центрального положения Ip0 указателя 212a ввода.
[0060]
Оператор U выполняет операцию прикосновения вдоль указателя 212a ввода и вводит жест круглой формы на сенсорной панели 211. В системе 1 дистанционной парковки в соответствии с настоящим вариантом осуществления положение и размер области определения жеста являются изменяемыми, и поэтому оператор U может вводить жест произвольного размера в произвольном месте на сенсорной панели 211, игнорируя указатель 212а ввода. Обнаруженные значения xraw и yraw для операции прикосновения, обнаруженной сенсорной панелью 211, сохраняются в блоке 213 хранения в любой момент времени. Скользящие средние значения xmean и ymean вычисляются блоком 212 определения жеста и сохраняются в блоке 213 хранения.
[0061]
На этапе S102 сенсорная панель 211 обнаруживает жест, который вводится посредством операции прикосновения оператора U. Если на сенсорной панели 211 обнаружен жест, блок 212 определения жеста определяет на этапе S103, введен ли обнаруженный жест в пределах первой области Ga0 определения жеста. Если обнаруженный жест введен в пределах первой области Ga0 определения жеста, блок 212 определения жеста определяет на этапе S104, является ли обнаруженный жест круговым жестом, таким как командный жест G4, и введен ли обнаруженный жест со скоростью ввода в заранее установленном заданном диапазоне.
[0062]
Если обнаруженный жест не является командным жестом G4, или если скорость ввода находится за пределами заданного диапазона, процесс переходит к этапу S106 для обнаружения следующего жеста. Напротив, если обнаруженный жест является командным жестом G4 и скорость ввода находится в пределах заданного диапазона, процесс переходит к этапу S105, на котором командный блок 214 формирует сигнал команды для выполнения, а блок 215 связи отправляет сигнал команды для выполнения в рассматриваемое транспортное средство V. На следующем этапе S106, если обнаружение жеста продолжается, процесс возвращается к этапу 103, с которого повторяются определение жеста и передача сигнала команды для выполнения.
[0063]
Обращаясь вновь к этапу 103, если обнаруженный жест не введен в пределах первой области Ga0 определения жеста, работа блока 212 определения жеста переходит к этапу S107, на котором блок 212 определения жеста устанавливает новую область определения жеста на основе текущего положения ввода жеста. Как описано выше, блок 212 определения жеста устанавливает новую область определения жеста на основании координат текущего положения прикосновения оператора U к сенсорной панели 211 и скользящих средних значений до тех пор, пока положение прикосновения не достигнет текущего положения прикосновения.
[0064]
На следующем этапе S108 блок 212 определения жеста использует вновь установленную область определения жеста для определения, является ли обнаруженный жест круговым жестом, таким как командный жест G4, и введен ли обнаруженный жест со скоростью ввода в пределах заранее установленного заданного диапазона. Если обнаруженный жест не является командным жестом G4 или если скорость ввода находится за пределами заданного диапазона, процесс переходит к этапу S110 для обнаружения следующего жеста. Напротив, если обнаруженный жест является командным жестом G4 и скорость ввода находится в пределах в заданного диапазона, процесс переходит к этапу S109, на котором командный блок 214 формирует сигнал команды для выполнения, а блок 215 связи отправляет командный сигнал для выполнения в рассматриваемое транспортное средство V. На следующем этапе S110, если обнаружение жеста продолжается, процесс возвращается к этапу 107, с которого установка новой области определения жеста, определение жеста и передача сигнала команды для выполнения повторяются.
[0065]
Обращаясь вновь к Фиг. 10, на этапе S11 блок 22 расширения и базовый блок 20 используются для определения относительного положения блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительного положения между оператором U, который имеет при себе блок 22 расширения, и рассматриваемым транспортным средством V. Базовый блок 20 выводит обнаруженное относительное положение на контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства. Если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного управления и вводится сигнал команды для выполнения от устройства 21 дистанционного управления, контроллер 16 следования по маршруту выводит целевой угол рулевого управления на контроллер 18 угла рулевого управления. Аналогичным образом, если расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного управления и вводится сигнал команды для выполнения от устройства 21 дистанционного управления, генератор 17 целевой скорости транспортного средства выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства. На основании целевого угла рулевого управления от контроллера 16 следования по маршруту контроллер 18 угла рулевого управления формирует управляющий сигнал для приведения в действие исполнительного механизма рулевого управления, предусмотренного в системе рулевого управления рассматриваемого транспортного средства. На основании целевой скорости транспортного средства от генератора 17 целевой скорости транспортного средства контроллер 19 скорости транспортного средства формирует управляющий сигнал для приведения в действие исполнительного механизма акселератора, предусмотренного в системе привода рассматриваемого транспортного средства V. Это позволяет выполнять управление автономной парковкой на следующем этапе S12.
[0066]
Процессы этапа S10 - этапа S13, который должен быть описан ниже, выполняются с заданными интервалами времени до тех пор, пока рассматриваемое транспортное средство V не прибудет в целевое парковочное место TPS на этапе S13. На этапе S13 определяется, прибыло ли рассматриваемое транспортное средство V в целевое парковочное место TPS. Если рассматриваемое транспортное средство V не прибыло в парковочное место TPS, процесс возвращается к этапу S10, тогда как если рассматриваемое транспортное средство V прибыло в целевое парковочное место TPS, рассматриваемое транспортное средство V останавливается и процесс завершается. Таким образом, управление автономным движением в режиме помощи выполняется по маршруту движения от текущего положения P1 рассматриваемого транспортного средства V до положения P4 промежуточной остановки, а управление автономным движением в режиме дистанционного управления выполняется по маршруту движения из положения P4 промежуточной остановки в целевое парковочное место TPS.
[0067]
Когда на этапе S10 выполняется дистанционное управление с использованием устройства 21 дистанционного управления, жест может быть не обнаружен. На этапе S20, проиллюстрированном на Фиг. 12, блок 212 определения жеста измеряет время отсутствия обнаружения, если ввод жеста временно становится необнаружимым. За этапом S20 следует этап S21, на котором блок 212 определения жеста сравнивает время отсутствия обнаружения со временем T определения радиуса, используемым для обнаружения положения ввода жеста. Когда время отсутствия обнаружения меньше, чем время определения радиуса T, возможные случаи включают в себя случай, когда палец оператора U временно отпустил сенсорную панель 211, и случай, когда палец оператора U временно вышел за пределы сенсорной панели 211. Таким образом, работа блока 212 определения жеста переходит к следующему этапу S22, на котором блок 212 определения жеста вычисляет скользящее среднее значение, используя координаты положения прикосновения, обнаруженного непосредственно перед тем, как жест стал необнаружимым, и устанавливает новую область определения жеста. используя результат вычисления. В случае, если время отсутствия обнаружения жеста меньше, чем время определения радиуса T, даже если новая область определения жеста установлена без использования положения прикосновения в течение времени отсутствия обнаружения, установленное положение области определения жеста существенно не отклоняется. Следовательно, на результат определения жеста не оказывается существенное влияние.
[0068]
На этапе S21, если время отсутствия обнаружения жеста не меньше времени T определения радиуса, процесс переходит к этапу S23, на котором время отсутствия обнаружения жеста сравнивается с заранее установленным временем ожидания повторного начала ввода. Если время отсутствия обнаружения меньше, чем время ожидания повторного начала ввода, возможные случаи включают в себя случай, при котором введенный жест не определяется в качестве командный жест. Следовательно, если область определения жеста установлена на основании жеста, который не определен в качестве командного жеста, положение установки области определения жеста может отклоняться. В таком случае работа блока 212 определения жеста переходит к следующему этапу S24. На этапе S24 блок 212 определения жеста сохраняет область определения жеста, которая установлена непосредственно перед тем, как жест стал необнаружимым, в блоке 213 хранения в качестве второй области определения жеста. Затем, если обнаружен ввод жеста, вторая область определения жеста считывается из блока 213 хранения для определения жеста.
[0069]
Обращаясь вновь к этапу S23, если время отсутствия обнаружения жеста не меньше времени ожидания ввода, процесс переходит к этапу S25. Если время отсутствия обнаружения жеста не меньше времени ожидания ввода, возможные случаи включают случай, в котором оператор U завершает ввод жеста посреди ввода. Следовательно, блок 212 определения жеста отображает указатель 212a ввода на сенсорной панели 211 и устанавливает первую область Ga0 определения жеста на основании заранее установленного центрального положения Ip0. Это может увеличить скорость определения вновь начатого жеста.
[0070]
Как описано выше, согласно системе 1 дистанционной парковки, в которой применяются способ дистанционного управления и устройство дистанционного управления для транспортного средства согласно настоящему изобретению, положение ввода, в котором оператор U выполняет операцию прикосновения, определяется на сенсорной панели 211 устройства 21 дистанционного управления, и положение области определения жеста, которое установлено блоком 212 определения жеста, делается изменяемым в соответствии с положением ввода. Кроме того, жест обнаруживается в области определения жеста, и блок 212 определения жеста определяет, является ли обнаруженный жест командным жестом, который заранее установлен. Затем, если жест является командным жестом, осуществляется управление рассматриваемым транспортным средством V, имеющим функцию управления автономным движением, для выполнения управления автономной парковкой в качестве управления автономным движением. Это позволяет вводить жест в произвольном положении на сенсорной панели 211, и, следовательно, рассматриваемое транспортное средство V может выполнять управление автономной парковкой независимо от положения ввода жеста. Кроме того, жест можно вводить, не беспокоясь о положении ввода, и таким образом повышается управляемость устройства 21 дистанционного управления. Кроме того, по сравнению со случаем использования всей сенсорной панели 211 в качестве области определения жеста, жест может быть определен в небольшой области определения жеста. Это может снизить нагрузку по обработке, необходимую для определения жеста.
[0071]
Кроме того, размер области определения жеста по отношению к сенсорной панели 211 делается изменяемым. Это позволяет вводить в сенсорную панель 211 жест любого размера и, таким образом, рассматриваемое транспортное средство V может выполнять управление автономной парковкой независимо от размера жеста. Кроме того, размер области определения жеста делается изменяемым между заранее установленным минимальным размером ввода и максимальным размером ввода, и таким образом можно исключить ввод жестов, имеющих чрезвычайно разные размеры.
[0072]
Кроме того, первая область Ga0 определения жеста устанавливается в заранее установленном положении, и новая область определения жеста устанавливается в соответствии с положением ввода операции прикосновения на сенсорной панели 211; следовательно, скорость определения жеста при начале ввода может быть увеличена, и рассматриваемое транспортное средство V может быстро начать управление автономной парковкой. Кроме того, новая область определения жеста устанавливается в соответствии с изменением положения ввода при операции прикосновения; поэтому, даже если положение ввода жеста отклоняется от первой области определения жеста, рассматриваемым транспортным средством V можно управлять для продолжения управления автономной парковкой. В частности, при начале дистанционного управления рассматриваемым транспортным средством V оператор U, вероятно, будет смотреть на устройство 21 дистанционного управления. Соответственно, отображая указатель 212a ввода в предварительно установленном положении для установки первой области Ga0 определения жеста, можно предложить операцию, необходимую для оператора U, и таким образом уменьшить ощущение дискомфорта, вызываемое у оператора U. Напротив, после начала управления автономной парковкой рассматриваемого транспортного средства V оператор U, вероятно, будет смотреть в сторону от устройства 21 дистанционного управления, чтобы контролировать рассматриваемое транспортное средство V. Таким образом, весьма вероятно, что операция прикосновения будет отклоняться от первой области Ga0 определения жеста; поэтому путем установки новой области определения жеста в соответствии с положением ввода операции прикосновения управление автономным движением рассматриваемого транспортного средства V может быть продолжено.
[0073]
Если жест временно становится необнаружимым, область определения жеста, которая установлена непосредственно перед тем, как жест стал необнаружимым, сохраняется в качестве второй области определения жеста, а если ввод жеста обнаружен, вторая область определения жеста используется для определения жеста. Если ввод жеста временно остановлен и повторно начат, весьма вероятно, что ввод жеста будет повторно начат в положении ввода до остановки. Следовательно, при использовании второй области определения жеста для определения при повторном вводе жеста скорость определения жеста может быть увеличена.
[0074]
Кроме того, если ввод жеста вновь обнаружен снова после того, как жест стал необнаружимым, жест может быть определен с использованием первой области определения жеста. Например, если ввод жеста временно остановлен, а затем возобновлен через относительно долгое время, скорость определения жеста может быть увеличена путем установки первой области определения жеста.
[0075]
Случаи, в которых жест становится необнаружимым, включают в себя случай, когда палец оператора U отпускает сенсорную панель 211, случай, когда жест не определяется в качестве командного жеста, и случай, когда оператор U заканчивает ввод жеста посреди ввода. Следовательно, согласно настоящему варианту осуществления, в любом из случая, когда палец оператора U отпускает сенсорную панель 211, случая, когда жест не определяется в качестве командного жеста, и случая, когда оператор U заканчивает ввод жеста посреди ввода, может быть сохранена и использована область определения жеста, которая установлена непосредственно перед этим, или может быть использована первая область определения жеста.
[0076]
Кроме того, если поперечное направление и продольное направление сенсорной панели 211 определены как ось X и ось Y, соответственно, командный жест в настоящем варианте осуществления представляет собой операцию прикосновения, в которой координаты положения ввода посредством операции прикосновения со стороны оператора непрерывно изменяются по меньшей мере по одной из оси X и оси Y. Таким образом, даже оператор, незнакомый с операцией прикосновения к сенсорной панели 211, может легко ввести командный жест.
[0077]
Кроме того, командный жест может быть определен как операция прикосновения для рисования траектории фигуры на сенсорной панели 211 таким образом, что начальная точка, в которой начинается один ввод жеста, и конечная точка, в которой заканчивается один ввод жеста, накладывались друг на друга. В качестве такого командного жеста может применяться операция прикосновения для рисования траектории круговой фигуры на сенсорной панели 211. Это позволяет вводить командный жест в форме, явным образом отличной от других монотонных и простых жестов, и поэтому может быть исключено ошибочное определение жеста.
[0078]
Если командный жест представляет собой операцию прикосновения для рисования траектории фигуры круглой формы на сенсорной панели 211, область определения жеста может быть определена координатами центра и радиусом фигуры круглой формы, и таким образом область определения жеста может быть установлена посредством относительно простого процесса по сравнению с процессом для жеста, состоящего из сложной фигуры.
[0079]
Кроме того, в настоящем варианте осуществления, если жест становится необнаружимым, осуществляется управление рассматриваемым транспортным средством V для остановки управления автономной парковкой. Таким образом, операция управления рассматриваемым транспортным средством V для остановки управления автономной парковкой не является необходимой, и таким образом дистанционное управление рассматриваемым транспортным средством V становится простым.
[0080]
Кроме того, в настоящем варианте осуществления управление автономной парковкой для парковки рассматриваемого транспортного средства V выполняется в виде управления автономным движением, и таким образом может осуществляться дистанционное управление рассматриваемым транспортным средством V и оно может парковаться из удаленного положения.
[0081]
«Второй вариант осуществления»
Далее будет приведено описание второго варианта осуществления системы дистанционной парковки, в которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же ссылочные позиции, что и в первом варианте осуществления, и их подробное описание не будет приведено.
[0082]
В первом варианте осуществления при начале ввода жеста первая область Ga0 определения жеста устанавливается в заранее установленном положении на сенсорной панели 211 независимо от положения ввода операции прикосновения по отношению к сенсорной панели 211. Затем, если положение ввода операции прикосновения не находится в пределах первой области Ga0 определения жеста, устанавливается новая область определения жеста в соответствии с положением ввода. С другой стороны, в настоящем варианте осуществления первая область Ga0 определения жеста устанавливается в заранее установленном положении на сенсорной панели 211 перед началом управления автономным движением рассматриваемого транспортного средства V. Затем после начала управления автономным движением рассматриваемого транспортного средства V устанавливается новая область определения жеста в соответствии с положением ввода операции прикосновения. То есть в настоящем варианте осуществления установка области определения жеста переключается между состояниями до и после начала управления автономным движением рассматриваемого транспортного средства V.
[0083]
Как показано на блок-схеме по Фиг. 13, на этапе S10, относящемся к дистанционному управлению по настоящему варианту осуществления, на этапе S101a перед началом управления автономным движением рассматриваемого транспортного средства V блок 212 определения жеста устанавливает первую область Ga0 определения жеста в заранее установленное положение на сенсорной панели 211 независимо от положения ввода операции прикосновения в отношении сенсорной панели 211. Указатель 212a ввода может отображаться на сенсорной панели 211 таким образом, чтобы он соответствовал первой области Ga0 определения жеста. Если на следующем этапе S102a обнаружен жест из первой области Ga0 определения жеста, на следующем этапе S103a блок 212 определения жеста определяет, является ли обнаруженный жест командным жестом G4 и введен ли обнаруженный жест со скоростью ввода в пределах заранее установленного заданного диапазона.
[0084]
Если обнаруженный жест не является командным жестом G4, или если скорость ввода находится за пределами заданного диапазона, работа блока 212 определения жеста возвращается к этапу S102a, на котором блок 212 определения жеста обнаруживает следующий жест. Напротив, если обнаруженный жест является командным жестом G4 и скорость ввода находится в пределах заданного диапазона, процесс переходит к этапу S104a, на котором командный блок 214 формирует сигнал команды для выполнения, а блок 215 связи отправляет командный сигнал для выполнения в рассматриваемое транспортное средство V. Это позволяет рассматриваемому транспортному средству V выполнять управление автономным движением. На следующем этапе S105a, если обнаружение жеста продолжается, процесс переходит к этапу S106a, на котором блок 212 определения жеста устанавливает новую область определения жеста в соответствии с положением ввода операции прикосновения на сенсорной панели 211. После установки новой области определения жеста процесс возвращается к этапу S103a, с которого определение жеста повторяется.
[0085]
Если рассматриваемое транспортное средство V не начинает управление автономным движением во время начала дистанционного управления рассматриваемым транспортным средством V, оператор U, вероятно, посмотрит на устройство 21 дистанционного управления, чтобы начать управление устройством 21 дистанционного управления. Соответственно, путем отображения указателя 212a ввода в заранее установленном положении на сенсорной панели 211 для установки первой области Ga0 определения жеста, можно предложить операцию, необходимую оператору U, и таким образом уменьшить ощущение дискомфорта, вызываемое у оператора U. Напротив, после начала управления автономной парковкой рассматриваемого транспортного средства V оператор U, вероятно, будет смотреть в сторону от устройства 21 дистанционного управления, чтобы контролировать рассматриваемое транспортное средство V. Таким образом, весьма вероятно, что операция прикосновения отклонится от первой области Ga0 определения жеста; поэтому посредством установки новой области определения жеста в соответствии с положением ввода операции прикосновения может быть продолжено управление автономным движением рассматриваемого транспортного средства V.
[0086]
«Третий вариант осуществления»
Далее будет приведено описание третьего варианта осуществления системы дистанционной парковки, в которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же ссылочные позиции, что и в первом варианте осуществления, и их подробное описание не будет приведено.
[0087]
Во втором варианте осуществления первая область Ga0 определения жеста устанавливается в заранее установленное положение на сенсорной панели 211 перед началом управления автономным движением рассматриваемого транспортного средства V. Затем, после начала управления автономным движением рассматриваемого транспортного средства V устанавливается новая область определения жеста в соответствии с положением ввода операции прикосновения. С другой стороны, в настоящем варианте осуществления новая область определения жеста устанавливается в соответствии с положением ввода операции прикосновения перед началом управления автономным движением рассматриваемого транспортного средства V. Затем, после начала управления автономным движением рассматриваемого транспортного средства V, первая область Ga0 определения жеста устанавливается в заранее установленное положение на сенсорной панели 211. То есть в настоящем варианте осуществления переключение области определения жеста является обратным по сравнению с переключением во втором варианте осуществления между состояниями до и после начала управления автономным движением рассматриваемого транспортного средства V.
[0088]
Как показано на блок-схеме по Фиг. 14, на этапе S101b перед началом управления автономным движением рассматриваемого транспортного средства V на этапе S10, относящемся к дистанционному управлению по настоящему варианту осуществления, блок 212 определения жеста устанавливает новую область определения жеста в соответствии с положением ввода операции прикосновения на сенсорной панели 211. Если на следующем этапе S102b обнаружен ввод жеста на сенсорной панели 211, на следующем этапе S103b блок 212 определения жеста определяет, является ли обнаруженный жест командным жестом G4 и введен ли обнаруженный жест со скоростью ввода в пределах заранее установленного заданного диапазона.
[0089]
Если обнаруженный жест не является командным жестом G4, или если скорость ввода выходит за пределы заданного диапазона, процесс возвращается к этапу S102b, на котором обнаруживается следующий жест. Напротив, если обнаруженный жест является командным жестом G4 и скорость ввода находится в пределах заданного диапазона, процесс переходит к этапу S104b, на котором командный блок 214 формирует сигнал команды для выполнения, а блок 215 связи отправляет командный сигнал для выполнения в рассматриваемое транспортное средство V. Это позволяет рассматриваемому транспортному средству V выполнять управление автономным движением. На следующем этапе S105b, если обнаружение жеста продолжается, процесс переходит к этапу S106b. На этапе S106b блок 212 определения жеста устанавливает первую область Ga0 определения жеста в заранее установленное положение на сенсорной панели 211 независимо от положения ввода операции прикосновения на сенсорной панели 211. Указатель 212a ввода может отображаться на сенсорной панели 211 таким образом, чтобы соответствовать первой области Ga0 определения жеста. После установки первой области Ga0 определения жеста процесс возвращается к этапу S103b, на котором определение жеста повторяется.
[0090]
Если рассматриваемое транспортное средство V не начинает управление автономным движением во время начала дистанционного управления рассматриваемым транспортным средством V, оператор U может посмотреть на рассматриваемое транспортное средство V, чтобы подтвердить, что рассматриваемое транспортное средство V начинает управление автономным движением. Соответственно, путем установки новой области определения жеста в соответствии с положением ввода операции прикосновения можно с легкостью начать управление автономным движением рассматриваемого транспортного средства V. Кроме того, после начала управления автономной парковкой рассматриваемого транспортного средства V оператор U может смотреть на устройство 21 дистанционного управления для точного управления устройством 21 дистанционного управления. Соответственно, при отображении указателя 212a ввода в заранее установленном положении и установке первой области Ga0 определения жеста оператор U может получить подсказку для точного управления устройством 21 дистанционного управления.
[0091]
«Четвертый вариант осуществления»
Далее будет приведено описание четвертого варианта осуществления системы дистанционной парковки, в которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же ссылочные позиции, что и в первом варианте осуществления, и их подробное описание не будет приведено.
[0092]
В первом - третьем вариантах осуществления осуществляется переключение области определения жеста при помощи инициирующего фактора, такого как изменение положения ввода операции прикосновения или время до или после начала управления автономным движением рассматриваемого транспортного средства V. С другой стороны, в настоящем варианте осуществления, в случае, если выполняется управление автономным движением рассматриваемого транспортного средства V, выполняется определение в отношении того, движется ли рассматриваемое транспортное средство V прямо вперед, и если рассматриваемое транспортное средство V движется прямо вперед, устанавливается новая область определения жеста в соответствии с положением ввода на сенсорной панели 211, тогда как, если транспортное средство не движется прямо вперед, первая область Ga0 определения жеста устанавливается в заранее установленном положении.
[0093]
Как проиллюстрировано на блок-схеме по Фиг. 15, на этапе S10, относящемся к дистанционному управлению по настоящему варианту осуществления, на этапе S101c блок 212 определения жеста определяет, выполняет ли рассматриваемое транспортное средство V управление автономным движением. Если рассматриваемое транспортное средство V выполняет управление автономным движением, на этапе S102c блок 212 определения жеста определяет, движется ли рассматриваемое транспортное средство V прямо вперед. Если рассматриваемое транспортное средство V движется прямо вперед, работа блока 212 определения жеста переходит к следующему этапу S103c, на котором блок 212 определения жеста устанавливает новую область определения жеста в соответствии с положением ввода операции прикосновения на сенсорной панели 211. Если на этапе S102c рассматриваемое транспортное средство V не движется прямо вперед, процесс переходит к следующему этапу S104c, на котором блок 212 определения жеста устанавливает первую область Ga0 определения жеста в заранее установленном положении на сенсорной панели 211 независимо от положения ввода операции прикосновения на сенсорной панели 211. Указатель 212a ввода может отображаться на сенсорной панели 211 таким образом, чтобы он соответствовал первой области Ga0 определения жеста.
[0094]
Если рассматриваемое транспортное средство V движется прямо вперед посредством управления автономным движением, в частности, если рассматриваемое транспортное средство V движется прямо вперед в направлении от оператора U, оператор U может смотреть на рассматриваемое транспортное средство V таким образом, чтобы рассматриваемое транспортное средство V не столкнулось с препятствием или тому подобным. Соответственно, при установке новой области определения жеста в соответствии с положением ввода операции прикосновения можно с легкостью выполнять управление автономным движением рассматриваемого транспортного средства V. Кроме того, если рассматриваемое транспортное средство V выполняет поворот или тому подобное, а не движется прямо вперед, управление автономным движением рассматриваемого транспортного средства V может выполняться относительно близко к оператору U. В таком случае оператор U может смотреть на устройство 21 дистанционного управления для точного управления устройством 21 дистанционного управления. Соответственно, при отображении указателя 212a ввода в заранее установленном положении и установке первой области Ga0 определения жеста оператор U может получить подсказку для точного управления устройством 21 дистанционного управления.
[0095]
«Пятый вариант осуществления»
Далее будет приведено описание пятого варианта осуществления системы дистанционной парковки, в которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же ссылочные позиции, что и в первом варианте осуществления, и их подробное описание не будет приведено.
[0096]
В четвертом варианте осуществления, если рассматриваемое транспортное средство V движется прямо вперед посредством управления автономным движением, область определения жеста устанавливается в соответствии с положением ввода на сенсорной панели 211, тогда как, если транспортное средство V не движется прямо вперед, первая область определения жеста Ga0 устанавливается в заранее установленном положении. В настоящем варианте осуществления, в отличие от четвертого варианта осуществления, если рассматриваемое транспортное средство V движется прямо вперед, первая область Ga0 определения жеста устанавливается в заранее установленном положении, тогда как, если рассматриваемое транспортное средство V не движется прямо вперед, область определения жеста устанавливается в соответствии с положением ввода на сенсорной панели 211.
[0097]
Как показано на блок-схеме по Фиг. 16, на этапе S10, относящемся к дистанционному управлению по настоящему варианту осуществления, на этапе S101d блок 212 определения жеста определяет, выполняет ли рассматриваемое транспортное средство V управление автономным движением. Если рассматриваемое транспортное средство V выполняет управление автономным движением, на этапе S102d блок 212 определения жеста определяет, движется ли рассматриваемое транспортное средство V прямо вперед. Если рассматриваемое транспортное средство V движется прямо вперед, работа блока 212 определения жеста переходит к следующему этапу S103d, на котором блок 212 определения жеста устанавливает первую область Ga0 определения жеста в заранее установленном положении на сенсорной панели 211 независимо от положения ввода операции прикосновения на сенсорной панели 211. Указатель 212a ввода может отображаться на сенсорной панели 211 таким образом, чтобы он соответствовал первой области Ga0 определения жеста. С другой стороны, если на этапе S102d рассматриваемое транспортное средство V не движется прямо вперед, на следующем этапе S104d блок 212 определения жеста устанавливает новую область определения жеста в соответствии с положением ввода операции прикосновения на сенсорной панели. 211.
[0098]
Если рассматриваемое транспортное средство V движется прямо вперед посредством управления автономным движением, весьма вероятно, что оператор U смотрит на устройство 21 дистанционного управления, потому что оператор U начинает управление устройством 21 дистанционного управления после предварительного подтверждения направления движения рассматриваемого транспортного средства V. Соответственно, при отображении указателя 212a ввода в заранее установленном положении на сенсорной панели 211 для установки первой области Ga0 определения жеста можно предложить операцию, необходимую оператору U, и таким образом уменьшить ощущение дискомфорта, вызываемое у оператора U. Напротив, если рассматриваемое транспортное средство V совершает поворот или тому подобное, а не движется прямо вперед, весьма вероятно, что оператор U смотрит на рассматриваемое транспортное средство V, чтобы подтвердить, что в окружении отсутствуют препятствия. Соответственно, путем установки новой области определения жеста в соответствии с положением ввода операции прикосновения можно с легкостью выполнять управление автономным движением рассматриваемого транспортного средства V.
[0099]
В вышеприведенных вариантах осуществления были описаны примеры, в которых устройство 21 дистанционного управления снабжено блоком 212 определения жеста и командным блоком 214, но в качестве замены такой конфигурации блоком 212 определения жеста и командным блоком 214 может быть снабжено рассматриваемое транспортное средство V. В этом случае устройство 21 дистанционного управления может передавать обнаруженное значение для сенсорной панели 211 в рассматриваемое транспортное средство V, блок 212 определения жеста рассматриваемого транспортного средства V может определять, является ли введенный жест командным жестом, и командный блок 214 рассматриваемого транспортного средства V может выводить сигнал команды для выполнения на контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства.
[Описание ссылочных позиций]
[0100]
1 Система дистанционной парковки
11 Устройство установки целевого парковочного места
12 Детектор положения транспортного средства
13 Детектор объектов
14 Генератор маршрута парковки
15 Вычислитель замедления объекта
16 Контроллер следования по маршруту
17 Генератор целевой скорости транспортного средства
18 Контроллер угла рулевого управления
19 Контроллер скорости транспортного средства
20 Базовый блок
22 Блок расширения
21 Устройство дистанционного управления
211 Сенсорная панель
212 Блок определения жеста
212a Указатель ввода
213 Блок хранения
214 Командный блок
215 Блок связи
G1 - G7 Командный жест
Ip0 Центральное положение
Ga0, Ga1, Ga2 Область определения жеста
V Рассматриваемое транспортное средство
TPS Целевое парковочное место
R1, R2 Маршрут парковки
W Стена (препятствие)
H1, H2 Дом (препятствие)
WD Садовое дерево (препятствие)
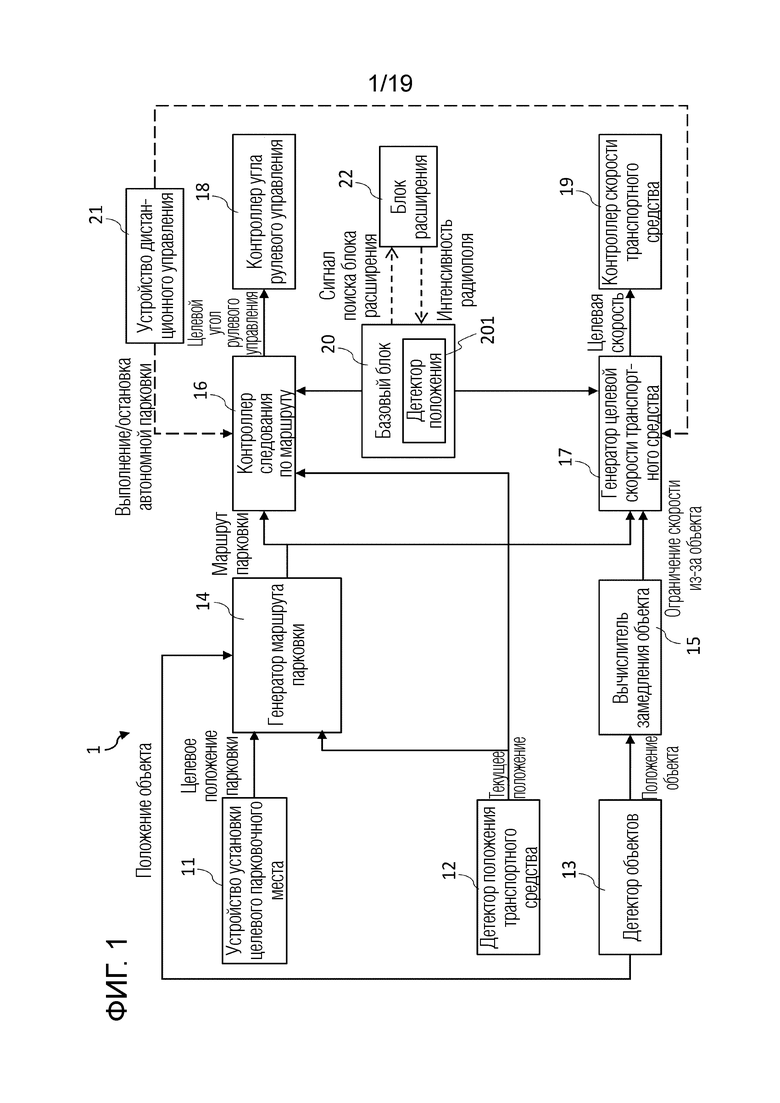
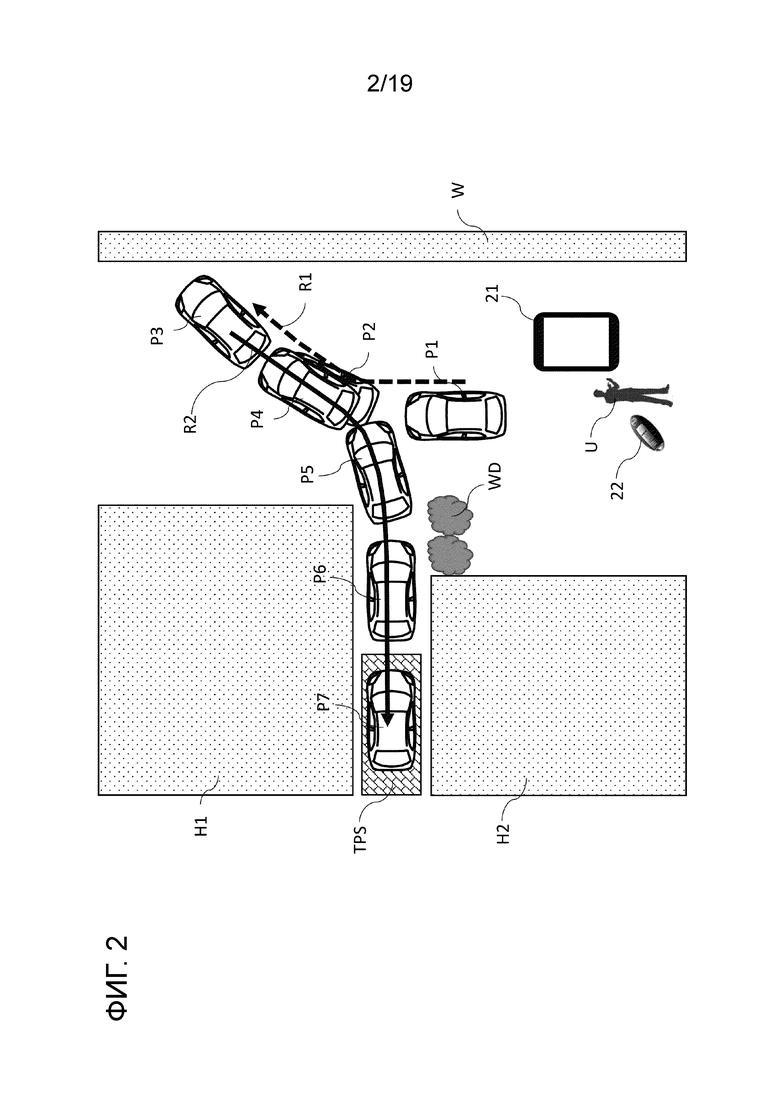
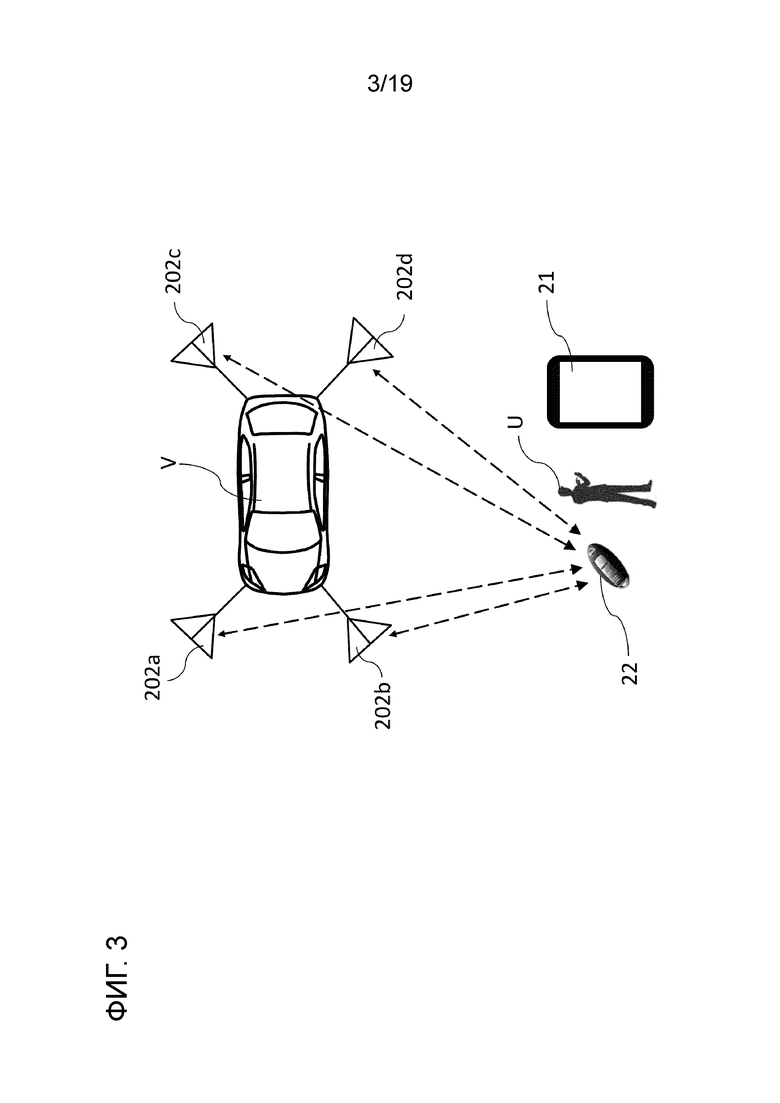
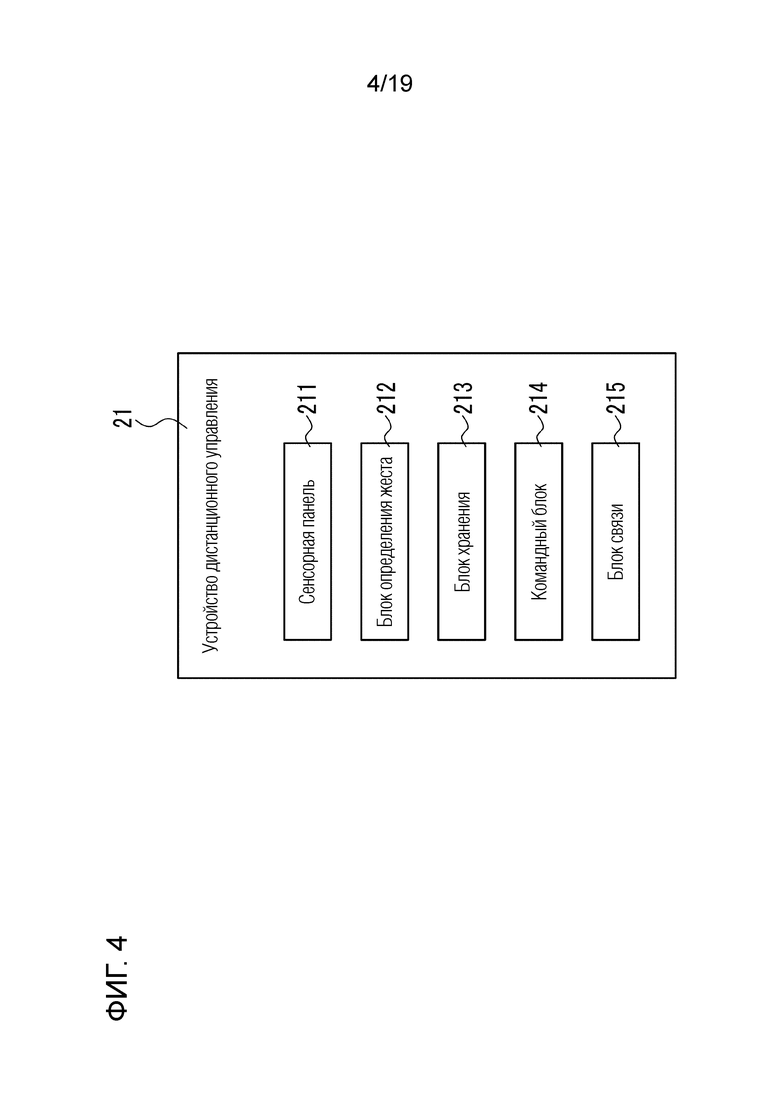
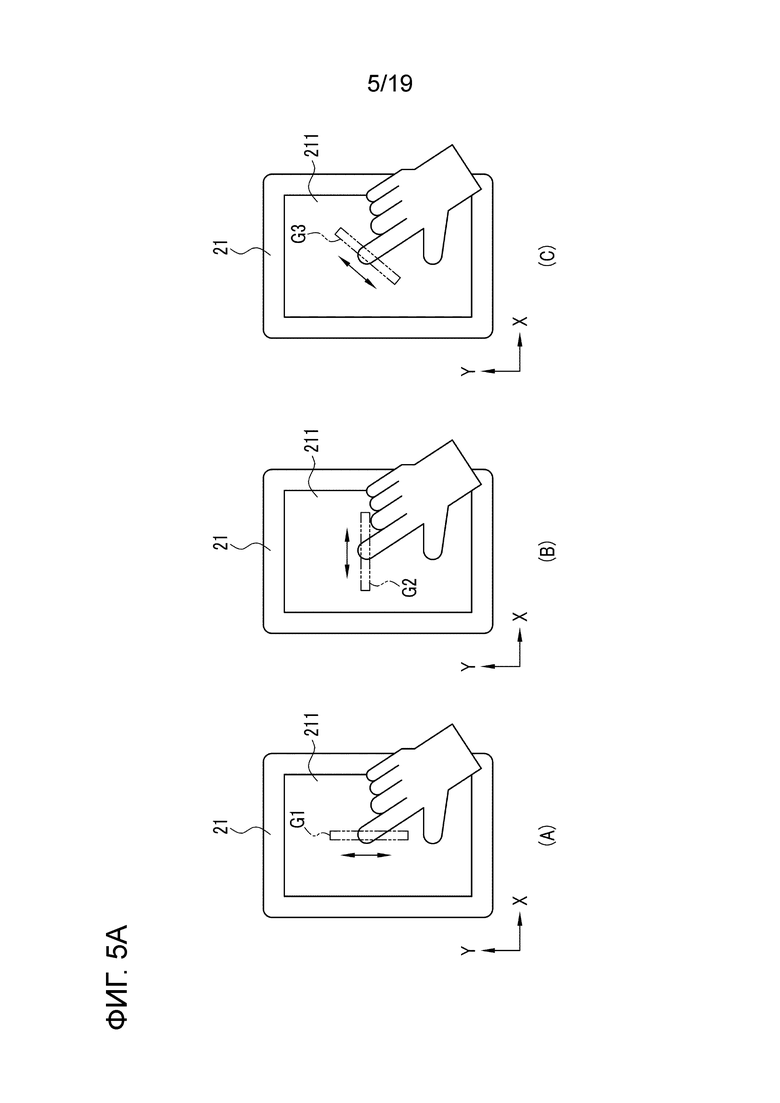
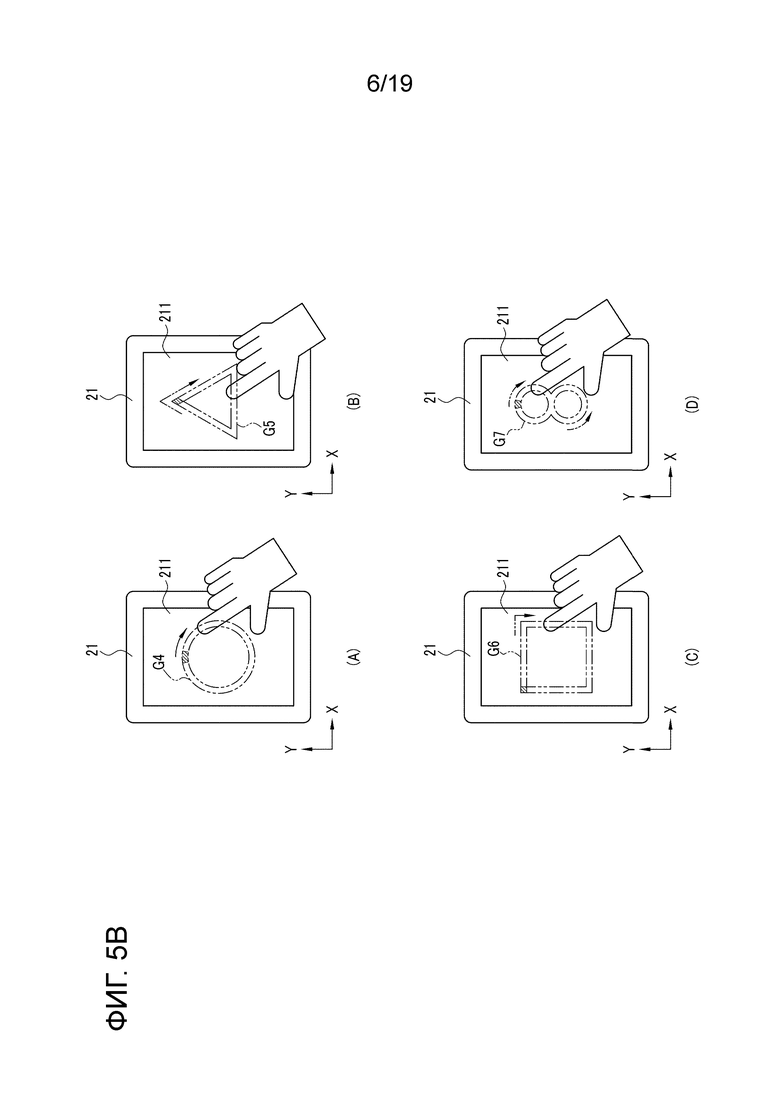
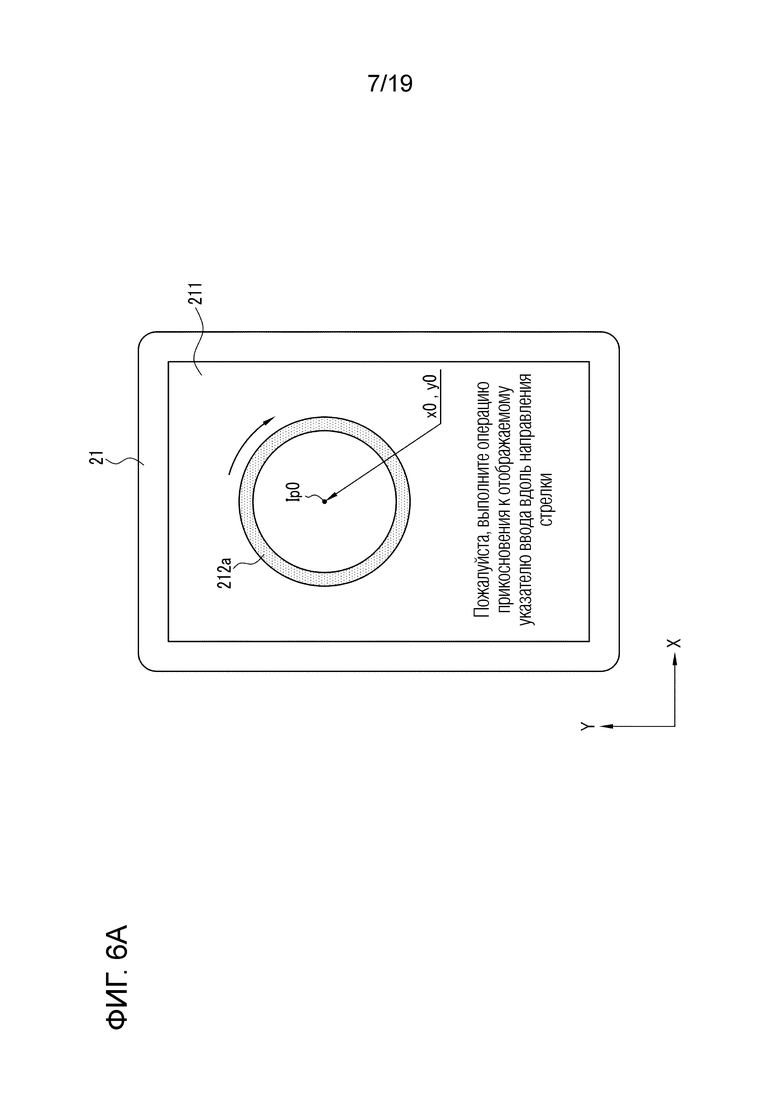
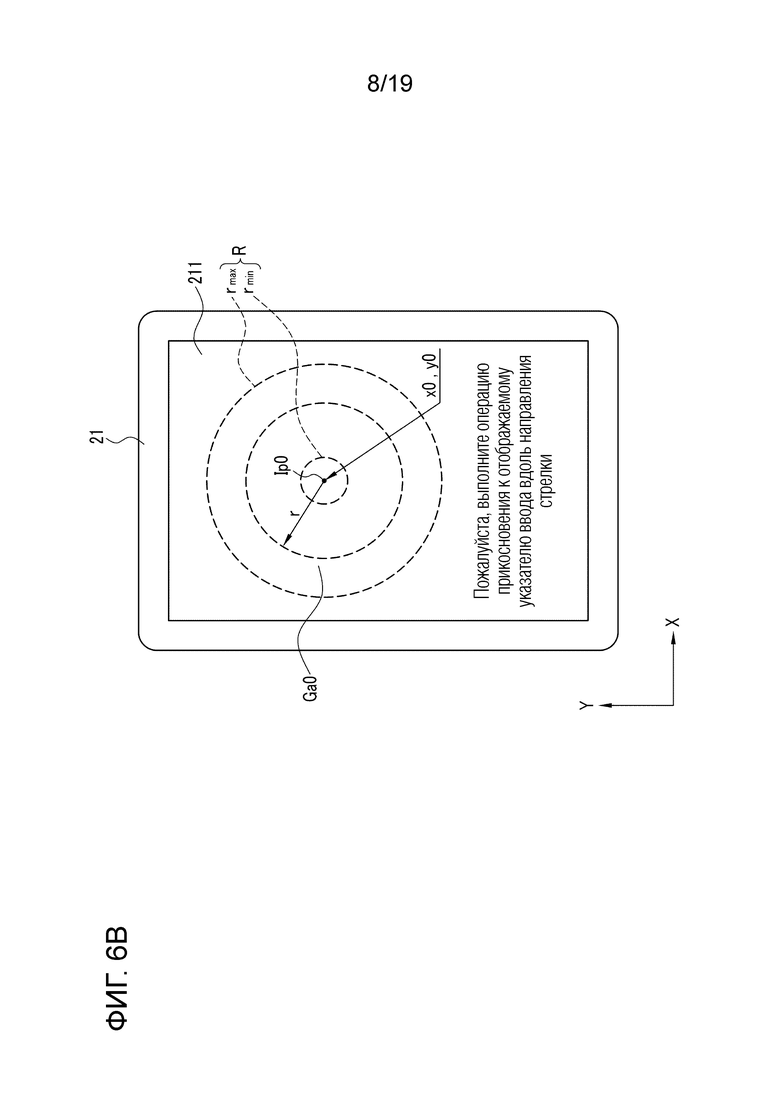
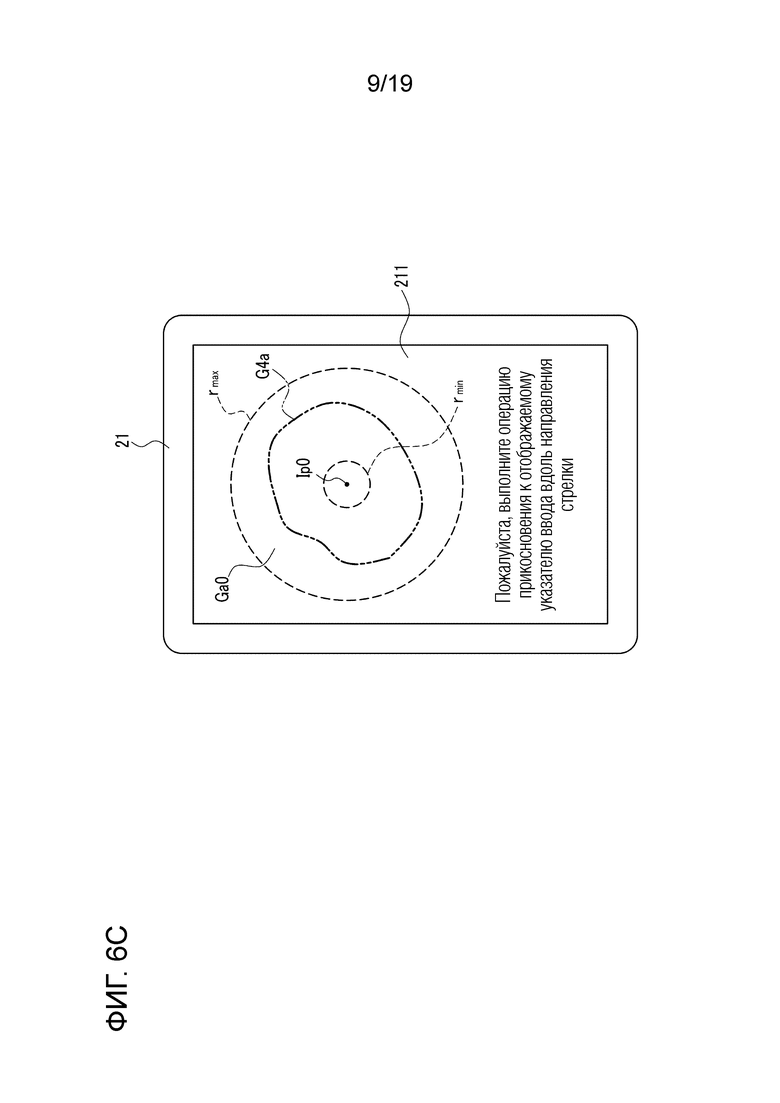
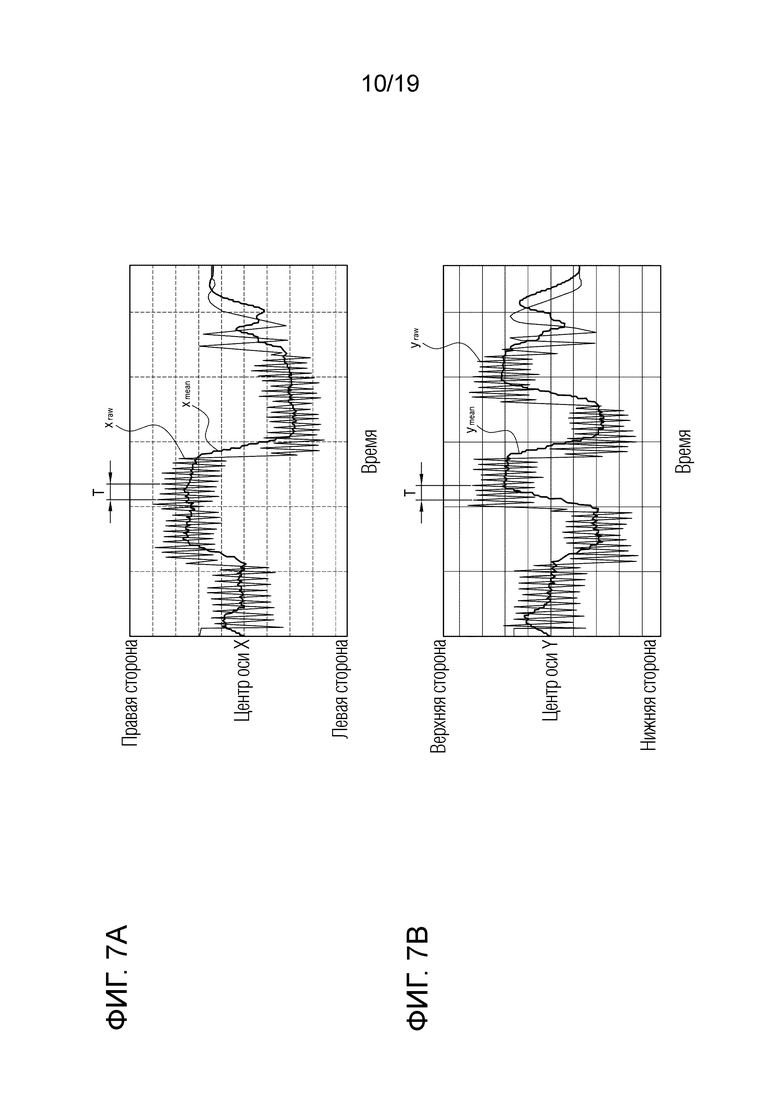
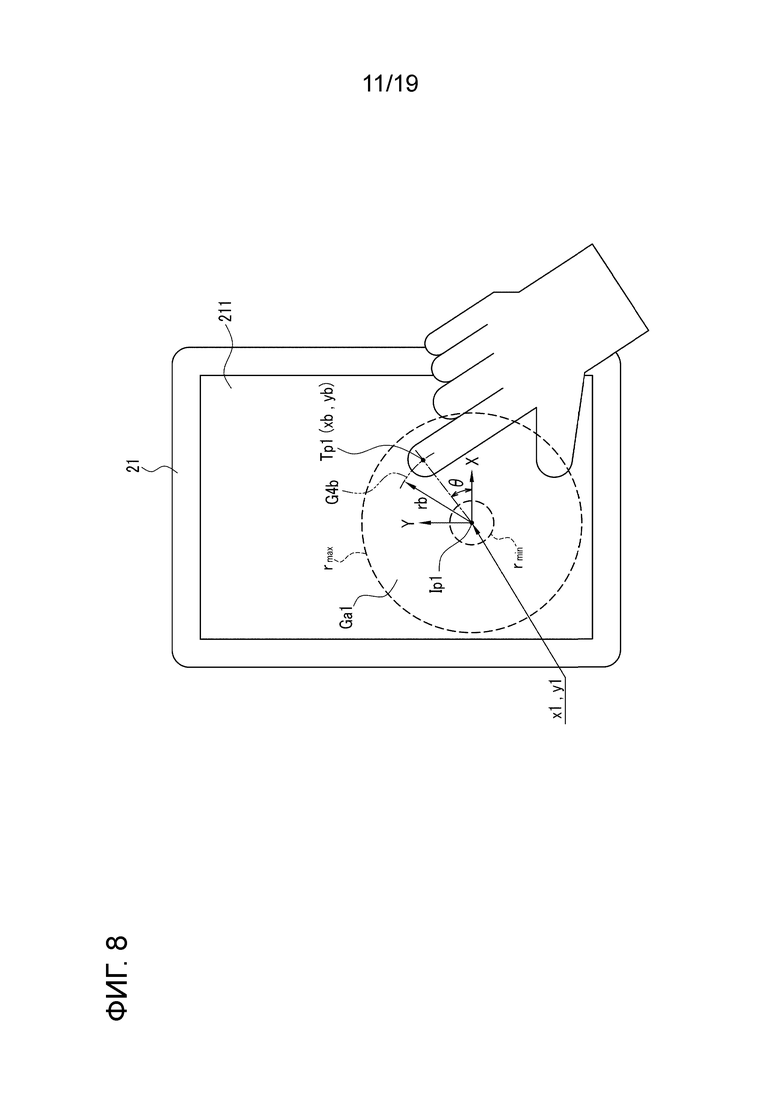
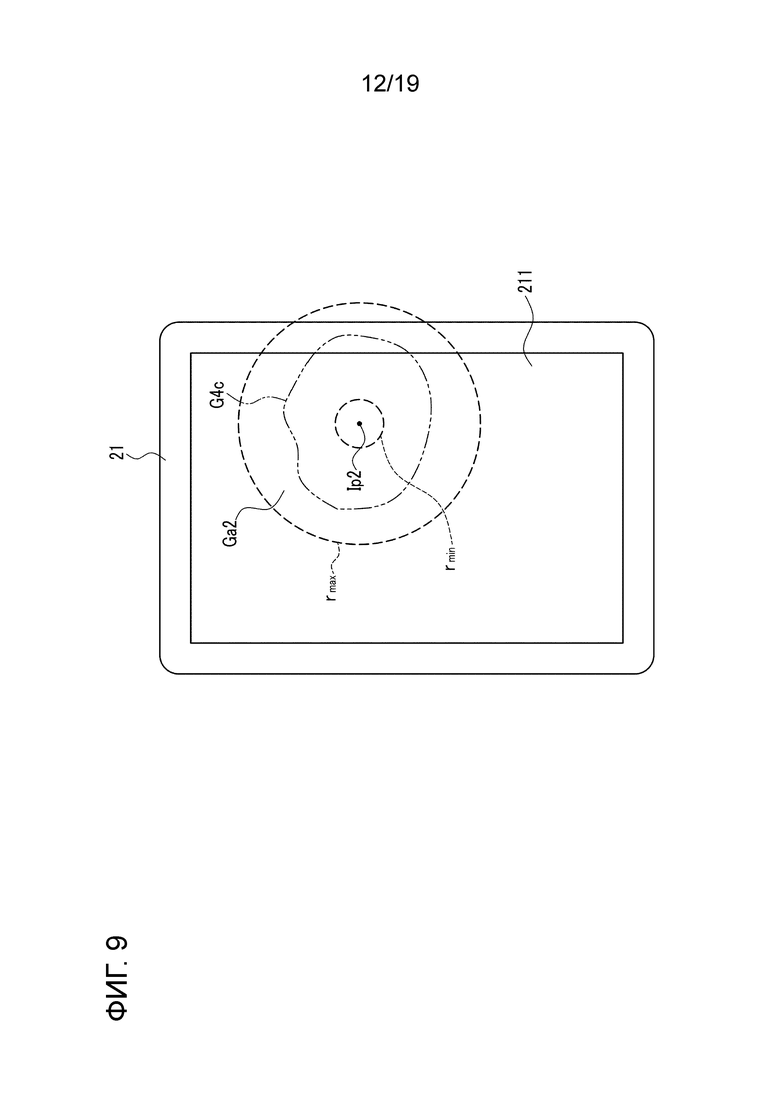
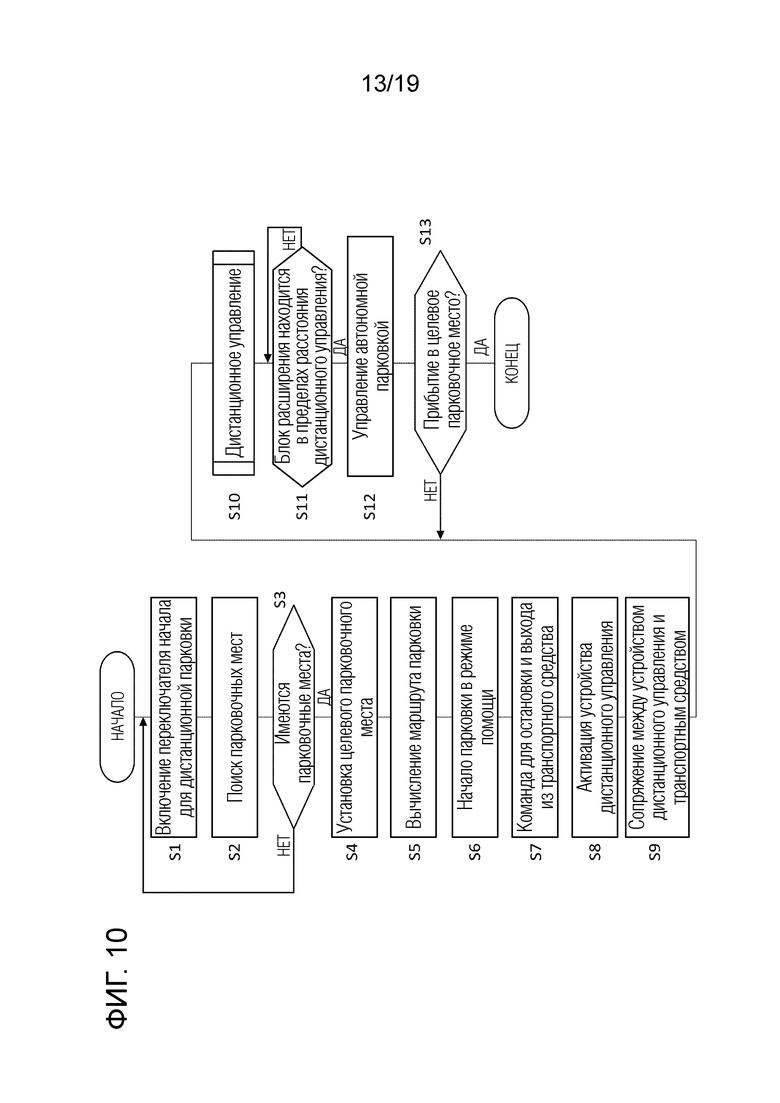
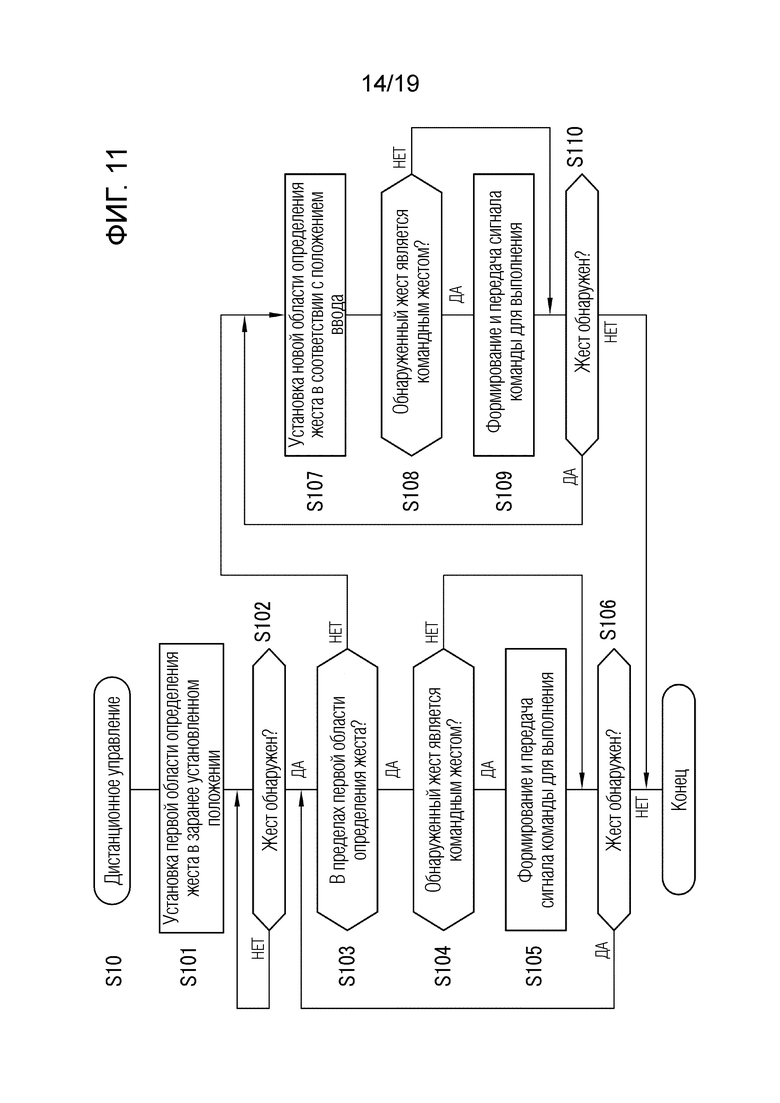
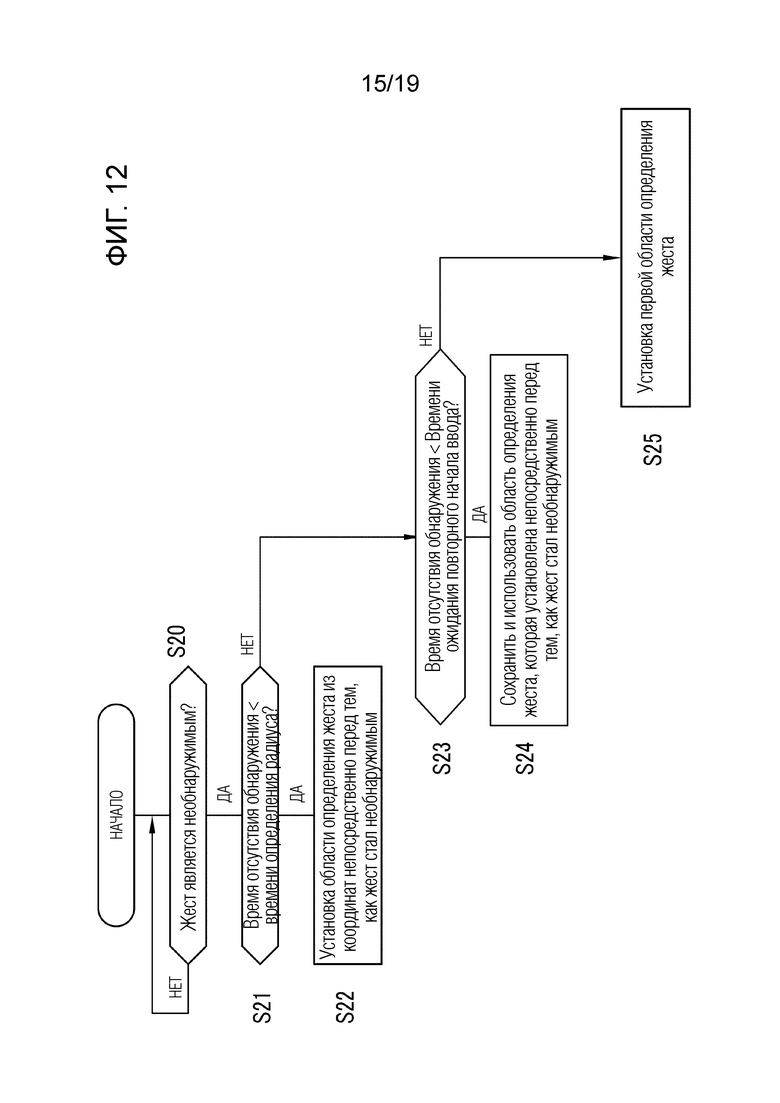
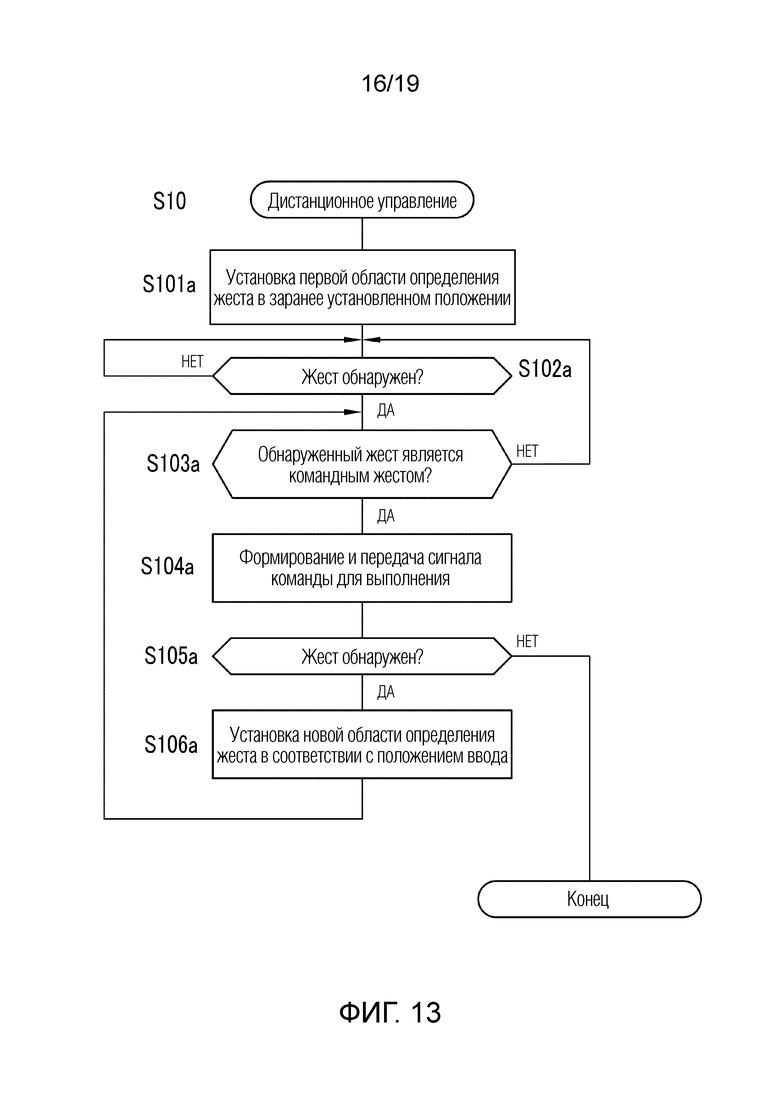
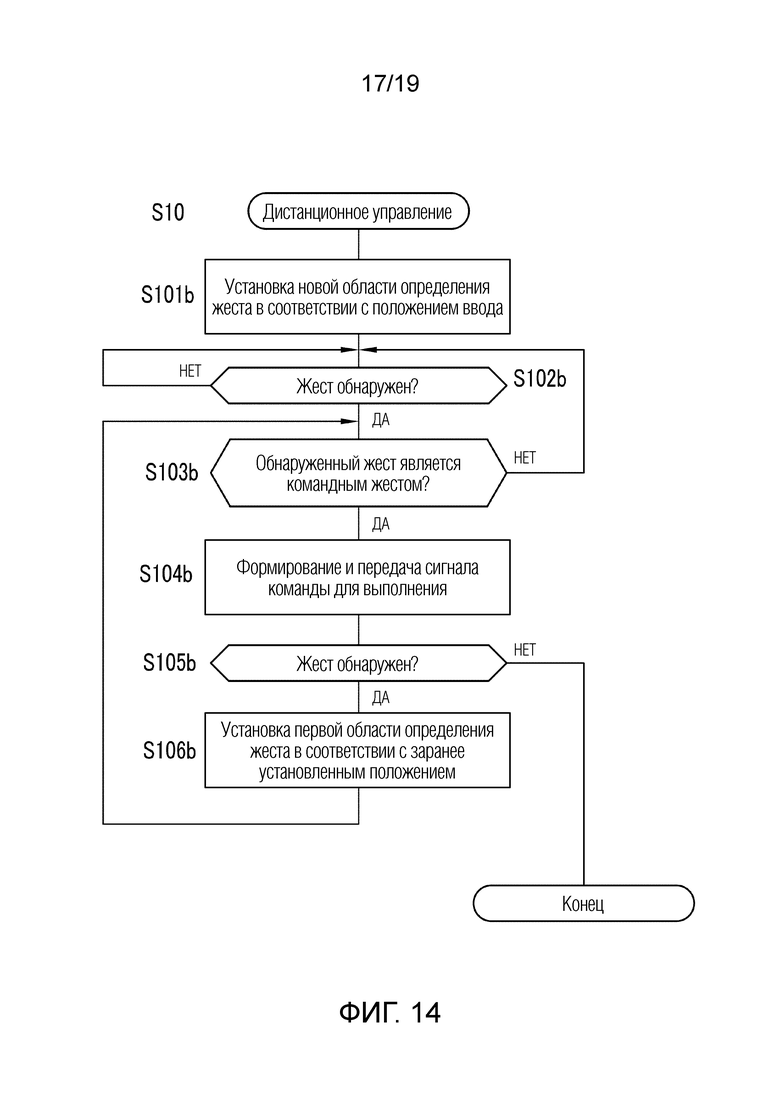
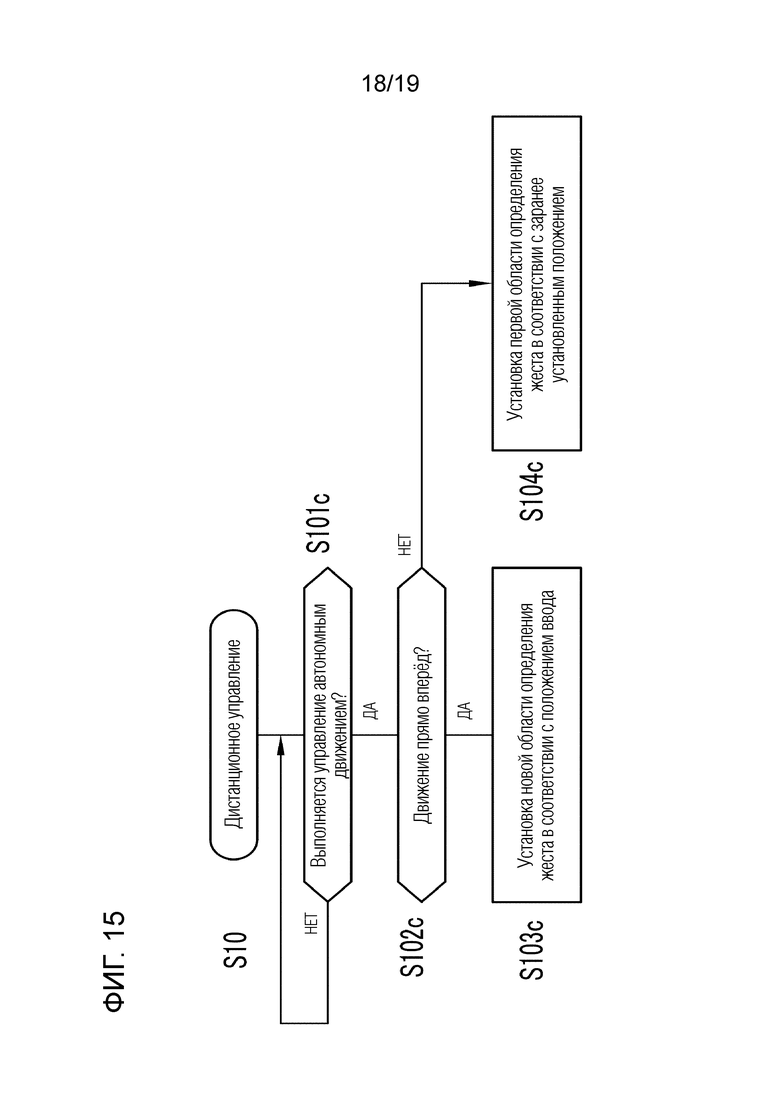
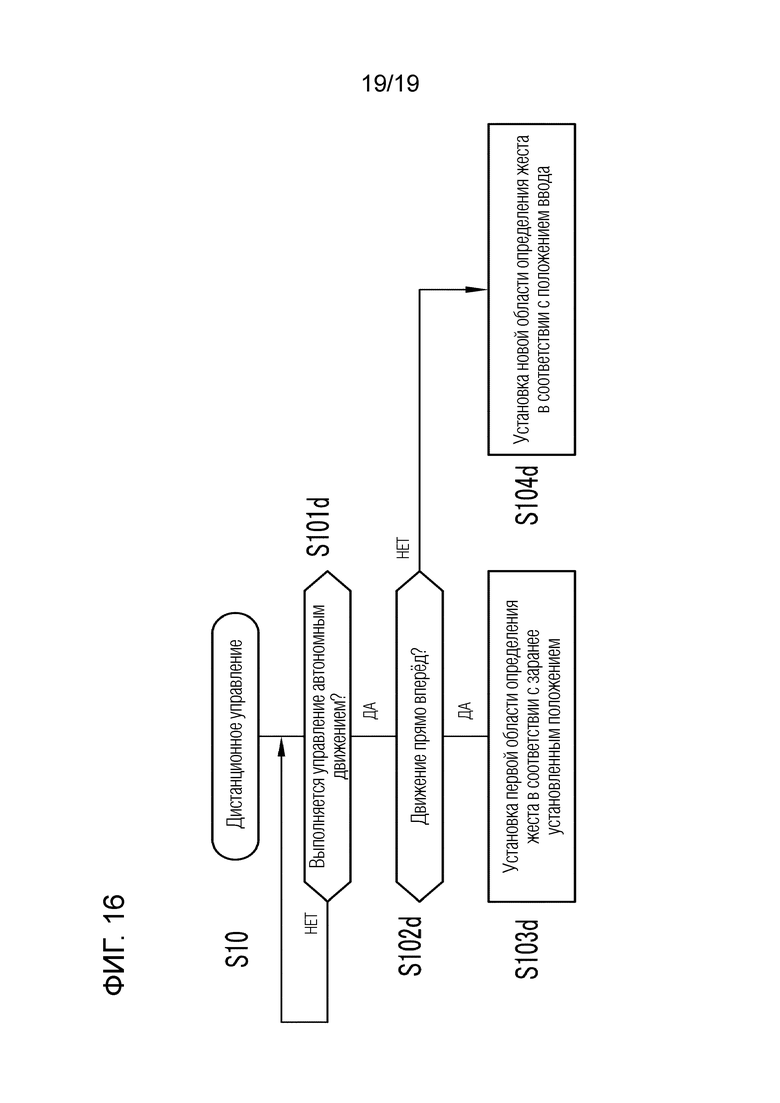
Изобретение относится к области дистанционного управления транспортным средством, а именно к выполнению управления автономным движением транспортного средства, а также к средствам управления, использующим сенсорную панель для ввода команд с помощью отслеживаемых жестов. Техническим результатом является обеспечение возможности ввода жеста в произвольном положении на сенсорной панели, благодаря чему транспортное средство может выполнять заданную функцию независимо от положения ввода жеста в устройство дистанционного управления. Для этого обнаруживают положение ввода, в котором оператором (U) выполняется операция прикосновения на сенсорной панели (211) устройства (21) дистанционного управления, и делают область определения (Ga1) жеста изменяемой в соответствии с положением ввода. Область (Ga1) определения жеста представляет собой область, в которой принимается жест (G4b) для дистанционного управления транспортным средством (V). Способ дополнительно включает в себя этап, на котором обнаруживают жест (G4b) из области (Ga1) определения жеста и определяют, является ли обнаруженный жест (G4b) командным жестом (G4), который заранее установлен. Если жест (G4b) является командным жестом (G4), осуществляется управление транспортным средством (V) для выполнения управления автономным движением. При этом устанавливают первую область определения жеста в заранее установленном положении перед началом управления автономным движением, и новую область определения жеста в соответствии с положением ввода после начала управления автономным движением. 4 н. и 13 з.п. ф-лы, 19 ил.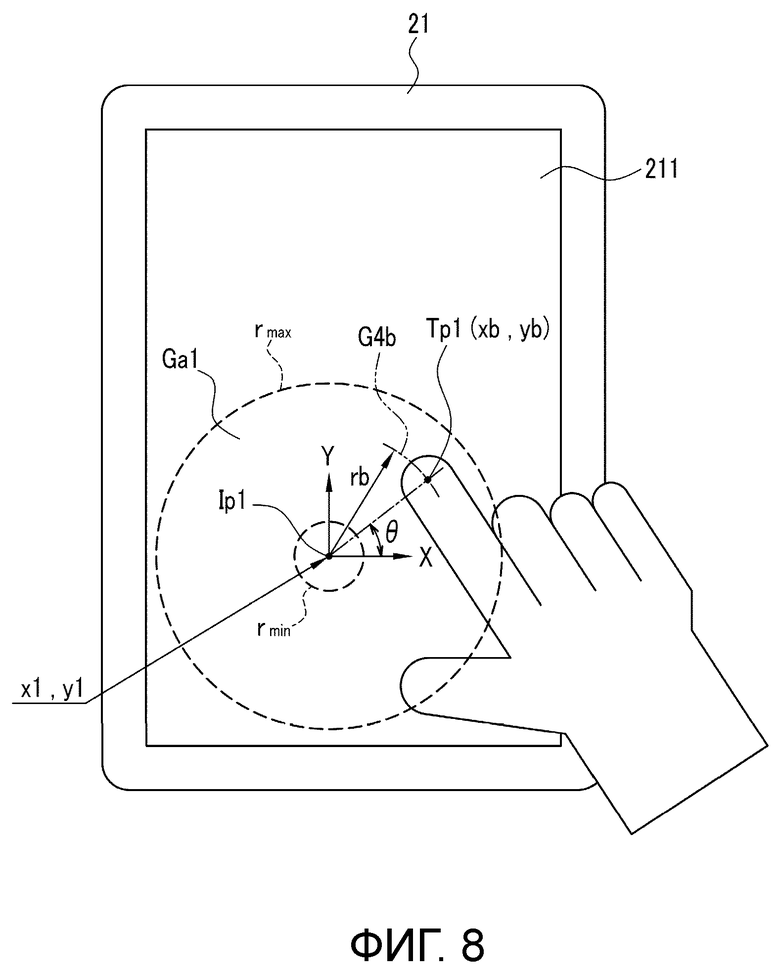
1. Способ дистанционного управления транспортным средством, содержащий этапы, на которых:
обнаруживают положение ввода, в котором оператор выполняет операцию прикосновения на сенсорной панели устройства дистанционного управления;
делают область определения жеста изменяемой в соответствии с положением ввода, причем область определения жеста является областью, в которой принимается жест для дистанционного управления транспортным средством;
обнаруживают жест из области определения жеста;
определяют, является ли обнаруженный жест командным жестом, который заранее установлен; и,
если жест является командным жестом, управляют транспортным средством для выполнения управления автономным движением, при этом транспортное средство имеет функцию управления автономным движением, при этом способ дополнительно содержит этапы, на которых:
устанавливают первую область определения жеста в заранее установленном положении перед началом управления автономным движением, и
устанавливают новую область определения жеста в соответствии с положением ввода после начала управления автономным движением.
2. Способ дистанционного управления транспортным средством по п. 1, в котором,
если жест становится необнаружимым, сохраняют область определения жеста, установленную непосредственно перед тем, как жест стал необнаружимым, в качестве второй области определения жеста; и
при повторном начале ввода жеста определяют, является ли жест командным жестом, из второй области определения жеста.
3. Способ дистанционного управления транспортным средством по п. 1, содержащий этапы, на которых,
если ввод жеста повторно начинается после того, как жест стал необнаружимым, определяют, является ли жест командным жестом, из первой области определения жеста.
4. Способ дистанционного управления транспортным средством по п. 2 или 3, в котором случаи, в которых жест становится необнаружимым, включают в себя случай, когда палец оператора отпускает сенсорную панель, случай, когда не определено, что жест является командным жестом, и случай, когда оператор заканчивает ввод жеста посреди ввода.
5. Способ дистанционного управления транспортным средством, содержащий этапы, на которых:
обнаруживают положение ввода, в котором оператор выполняет операцию прикосновения на сенсорной панели устройства дистанционного управления;
делают область определения жеста изменяемой в соответствии с положением ввода, причем область определения жеста является областью, в которой принимается жест для дистанционного управления транспортным средством;
обнаруживают жест из области определения жеста;
определяют, является ли обнаруженный жест командным жестом, который заранее установлен; и,
если жест является командным жестом, управляют транспортным средством для выполнения управления автономным движением, при этом транспортное средство имеет функцию управления автономным движением, при этом способ дополнительно содержит этапы, на которых:
устанавливают область определения жеста изменяемой в соответствии с положением ввода перед началом управления автономным движением; и
устанавливают область определения жеста в заранее установленном положении после начала управления автономным движением.
6. Способ дистанционного управления транспортным средством по любому из пп. 1-5, в котором размер области определения жеста по отношению к сенсорной панели является изменяемым.
7. Способ дистанционного управления транспортным средством по п. 6, в котором размер области определения жеста является изменяемым между минимальным размером ввода и максимальным размером ввода, которые заранее установлены.
8. Способ дистанционного управления транспортным средством по любому из пп. 1-7, содержащий этапы, на которых:
если выполняется управление автономным движением, определяют то, движется ли транспортное средство прямо вперед посредством управления автономным движением;
если транспортное средство движется прямо вперед, устанавливают область определения жеста в соответствии с положением ввода; и,
если транспортное средство не движется прямо вперед, устанавливают область определения жеста в заранее установленном положении.
9. Способ дистанционного управления транспортным средством по любому из пп. 1-8, в котором, если поперечное направление и продольное направление сенсорной панели определены как ось X и ось Y, соответственно, командный жест представляет собой операцию прикосновения, при которой координаты положения ввода при операции прикосновения оператора непрерывно изменяются по меньшей мере по одной из оси X и оси Y.
10. Способ дистанционного управления транспортным средством по п. 9, в котором командный жест представляет собой операцию прикосновения для рисованию траектории фигуры на сенсорной панели таким образом, что начальная точка, в которой начинается один ввод жеста, и конечная точка, в которой заканчивается данный один ввод жеста, накладываются друг на друга.
11. Способ дистанционного управления транспортным средством по п. 10, в котором командный жест представляет собой операцию прикосновения для рисования на сенсорной панели траектории фигуры круглой формы.
12. Способ дистанционного управления транспортным средством по п. 11, в котором область определения жеста определяется координатами центра и радиусом фигуры круглой формы.
13. Способ дистанционного управления транспортным средством по любому из пп. 1-12, в котором, если жест становится необнаружимым, осуществляется управление транспортным средством для остановки управления автономным движением.
14. Способ дистанционного управления транспортным средством по любому из пп. 1-13, в котором управление автономным движением представляет собой управление парковкой для парковки транспортного средства.
15. Способ дистанционного управления транспортным средством по любому из пп. 1-14, содержащий этапы, на которых:
отображают указатель ввода, указывающий форму жеста, на сенсорной панели; и
устанавливают область определения жеста в положении, соответствующем указателю ввода.
16. Устройство дистанционного управления транспортным средством, содержащее:
устройство дистанционного управления для транспортного средства, при этом устройство дистанционного управления включает в себя сенсорную панель, выполненную с возможностью обнаружения положения ввода операции прикосновения, выполняемой оператором;
блок определения жеста, выполненный с возможностью:
обеспечения возможности изменения области определения жеста в соответствии с положением ввода, при этом область определения жеста является областью, в которой принимается жест для дистанционного управления транспортным средством; и
определения, является ли жест, обнаруженный из области определения жеста, командным жестом, который является заранее установленным; и
командный блок, выполненный с возможностью, если жест является командным жестом, управления транспортным средством для выполнения управления автономным движением, причем транспортное средство имеет функцию управления автономным движением, причем
блок определения жеста выполнен с возможностью:
установки первой области определения жеста в заранее установленном положении перед началом управления автономным движением, и
установки новой области определения жеста в соответствии с положением ввода после начала управления автономным движением.
17. Устройство дистанционного управления транспортным средством, содержащее:
устройство дистанционного управления для транспортного средства, при этом устройство дистанционного управления включает в себя сенсорную панель, выполненную с возможностью обнаружения положения ввода операции прикосновения, выполняемой оператором;
блок определения жеста, выполненный с возможностью:
обеспечения возможности изменения области определения жеста в соответствии с положением ввода, при этом область определения жеста является областью, в которой принимается жест для дистанционного управления транспортным средством; и
определения, является ли жест, обнаруженный из области определения жеста, командным жестом, который является заранее установленным; и
командный блок, выполненный с возможностью, если жест является командным жестом, управления транспортным средством для выполнения управления автономным движением, причем транспортное средство имеет функцию управления автономным движением, причем
блок определения жеста выполнен с возможностью:
установки области определения жеста изменяемой в соответствии с положением ввода перед началом управления автономным движением; и
установки области определения жеста в заранее установленном положении после начала управления автономным движением.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ЛИНЕЙНЫЙ УГЛОМЕР ДЛЯ МЕТАЛЛОКОНСТРУКЦИЙ | 1953 |
|
SU100984A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| ПИЩЕВОЙ ФУНКЦИОНАЛЬНЫЙ ПРОДУКТ | 2013 |
|
RU2541385C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

