Изобретение относится к области робототехники и технической кибернетики и может быть использовано в системах контроля и эксплуатации сложных технических объектов и крупногабаритной автомобильной техники.
Известен робототехнический комплекс (РТК) [1], содержащий платформу, установленную на рельсовом пути на ходовых колесах, снабженных приводами, связанными с этими колесами, а также манипулятор, шарнирно установленный на платформе и содержащий звенья, соединенные с рабочим органом кабель-тросом.
К числу недостатков этого робототехнического комплекса следует отнести его конструктивную сложность, обусловленную наличием большого количества механических узлов и соединений, связанных между собой. Кроме того, он предназначен для выполнения работ в бассейне выдержки атомной электростанции и используется для подъема специальных изделий из бассейна выдержки с конденсатом и поэтому не может быть применен для выполнения работ контроля технического состояния объекта, выполнения операций технического обслуживания, охраны, мониторинга условий эксплуатации и окружающего пространства сооружения на определенной высоте вокруг объекта.
Известен мобильный робототехнический комплекс [2], который содержит манипулятор на подвижной платформе, рабочее место оператора с которого осуществляется дистанционное управление и комплект дополнительного оборудования. Мобильный РТК представляет собой самоходное транспортное устройство с электроприводом движителя и бортовыми источниками питания, на котором смонтирована система дистанционной связи с постом управления, бортовая телевизионная система, включающая отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, а в состав каждого видеоблока входит видеокамера, заключенная в защитный кожух с источниками подсветки, один из этих видеоблоков, выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. На транспортном средстве также укреплены приводы многоступенчатого манипулятора и сам манипулятор с захватным устройством. Мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности. Этот аналог также предназначен для ликвидации неразорвавшихся боеприпасов и взрывоопасных предметов, находящихся, как правило на поверхности открытой местности, и поэтому конструктивно не может быть применен для проведения работ в сооружении, на определенной высоте, для контроля технического состояния вокруг контролируемого объекта, выполнения операций технического обслуживания, мониторинга условий эксплуатации контролируемого объекта и окружающего пространства сооружения.
Известен мобильный робототехнический комплекс [3] состоящий из мобильного робота, который представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы: система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства. Мобильный робототехнический комплекс снабжен системой видеонаблюдения с беспроводным устройством передачи сигнала оператору, смонтированной на беспилотном летательном аппарате винтового типа, связанной с постом дистанционного наблюдения. Изобретение обеспечивает возможность получения непрерывной визуальной информации о месте работы с необходимых ракурсов.
Данный аналог имеет в своем составе беспилотный летательный аппарат, самоходное транспортное средство, на котором смонтированы система дистанционной связи и поэтому конструктивно не могут быть применены для проведения работ в сооружении, на определенной высоте, для контроля технического состояния объекта, выполнения операций технического обслуживания, охраны, мониторинга условий эксплуатации и окружающего пространства сооружения.
Известна подвесная роботизированная система и способ ее работы [4]. Система предназначена для перемещения штабелируемых объектов на складской зоне.
Данный аналог не имеет манипулятора, систем видео наблюдения и не может быть использовано для контроля технического состояния объекта специального назначения, выполнения операций технического обслуживания, охраны, мониторинга условий эксплуатации и окружающего пространства специального сооружения.
Известны системы и методы использования роботов для мониторинга окружающей среды [5]. Данный аналог предусматривает контроль окружающей среды на предмет загазованности в жилых помещениях и складах с использованием облачных сервисов, а также принятием мер для их ликвидации.
Наиболее близким аналогом изобретения является робот для неблагоприятных условий внешней среды [6], исполненный на линейной направляющей, имеющий в своем составе манипулятор с рабочим органом, и предназначенный для контроля, мониторинга, технического обслуживания технологической секции с резервуаром, насосами и трубопроводами, относящимися к нефтедобывающей платформе и обладающий стойкостью к воздействию неблагоприятной среды. Данный портальный манипулятор имеет возможность дистанционного управления, используется в опасных и труднодоступных средах для человека. Недостатками аналога являются:
недостаточная рабочая зона для работы с контролируемым и обслуживаемым объектом;
исполнение на линейной направляющей ограничивает подвижность манипулятора;
отсутствие сменных насадок не обеспечивает весь комплекс проведения работ;
не может по голосовому запросу дать рекомендации при выполнении работ;
не способен вести мониторинг окружающей среды для обеспечения нормальной работы человека;
не может обнаруживать утечки горюче-смазочных жидкостей, хладагента и других отравляющих веществ.
Данное устройство принципиально отличается от многофункционального робототехнического комплекса для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта (под объектом понимается объект технического обслуживания (ремонта) [7]) в сооружении, набором средств конструктивного исполнения и выполняемым задачам. Предназначен для контроля технического состояния объекта, выполнения операций технического обслуживания, охраны, мониторинга условий эксплуатации и окружающего пространства сооружения в том числе способен к круговому перемещению по рельсовым направляющим по всему контуру сооружения, вокруг объекта. Отличается наличием многофункционального периферийного устройства оснащенного цифровой видеокамерой, источником уф-излучения и системой анализа спектра УФ-диапазона для обнаружения утечек горюче-смазочных материалов, хладагента, наличия на поверхности химических, биологических и других отравляющих веществ. Оснащен газоанализатором, прибором для измерения параметров микроклимата (измеряет температуру, относительную влажность, скорость воздушного потока и давления) для анализа условий эксплуатации контролируемого объекта. По определенному алгоритму предлагает рекомендации по видам работ, которые необходимо провести при следующем техническом обслуживании контролируемого объекта и сооружения. Упомянутый робототехнический комплекс осуществляет периодический мониторинг окружающего пространства для обнаружения в воздухе и на поверхностях контролируемого объекта вредных веществ, которые влияют на безопасную работу человека. Выполняет охранную функцию, входящая в его состав камера легко и довольно недорого реализует механизм распознавания по лицу, осуществляет контроль помещения на присутствие в нем посторонних предметов, которых по логике и соображениям безопасности быть не должно.
Применение устройства ограничивается рамками самого сооружения, в котором оно используется, а именно наличием определенного свободного пространства, формой сооружения. Предлагаемый РТК является дорогим. Требуется дополнительная подготовка обслуживающего персонала.
Задачей изобретения является создание устройства, помогающее оператору оценивать техническое состояние наблюдаемого объекта в сооружении и выполняющее следующие функции:
1. Мониторинг условий окружающей среды, в которой эксплуатируется объект;
2. Визуальный осмотр технического состояния объекта, выполнения операций технического обслуживания и ультразвуковой диагностики элементов наблюдаемого объекта;
3. Охрана объекта специального назначения.
4. Информационное сопровождении оператора.
Технический результат достигается тем, что робототехнический комплекс контроля технического состояния, содержит многозвенный манипулятор с рабочим органом оборудованным цифровой видеокамерой, автоматизированное рабочее место оператора, две параллельные, замкнутые рельсовые направляющие, расположенные на необходимой высоте от пола, платформу, оборудованную электромоторами, цифровым модулем управления (компьютер), блоком питания, аккумулятором, диагностическим модулем (резервной системы управления роботом и платформой), газоанализатором, цифровым модулем обработки сигнала с ультразвукового дефектоскопа, модулем обработки сигнала ультрафиолетового спектра, ведущими колесами и вспомогательными роликами, расположенных в каналах рельсовых направляющих, изолированную направляющую с подпружиненной пластиной, изолированный контакт, сменные насадки такие как:
- многофункциональное периферийное устройство, состоящее из датчика ультразвукового дефектоскопа со стабилизатором, камеры, источника УФ-излучения, лазерного дальномера, диагностического люка, прибора для измерения параметров микроклимата (метеоскопа), антенно-согласующего устройства, газоанализатора;
- насадка покраски, состоящая из заливного бака, заборной магистрали, выпускной магистрали, управляемого обратного клапана, поршня; электромагнита, ударной планки; регулятора; перекачивающего насоса; шестиотводного распределительного коллектора, канал-сопла;
- насадка с силомоментным очувствлением, состоящая из узлов подвижных механических пальцев, губ, камеры PTZ;
- насадка обжимного типа с датчиками ультразвукового дефектоскопа, состоящая из основание насадки, пневмоцилиндра, подвижных звеньев насадки обжимного типа, стальных шариков; пружин; проушины, датчиков дефектоскопа, концов зацепления
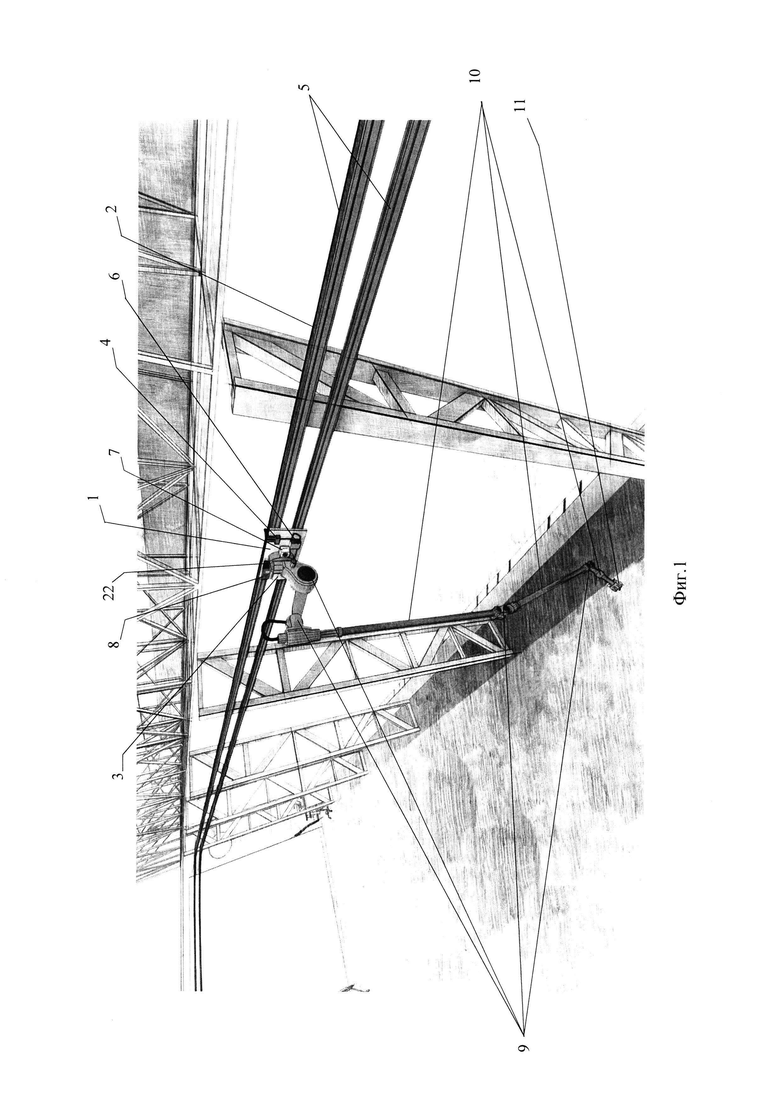
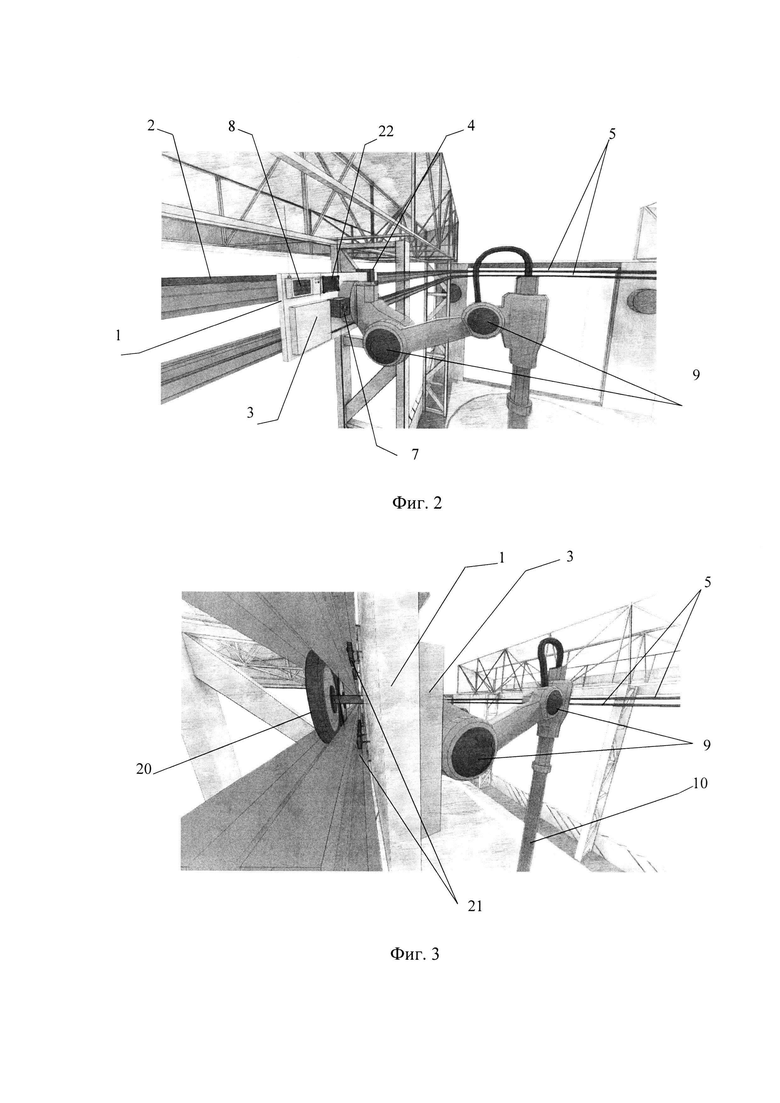
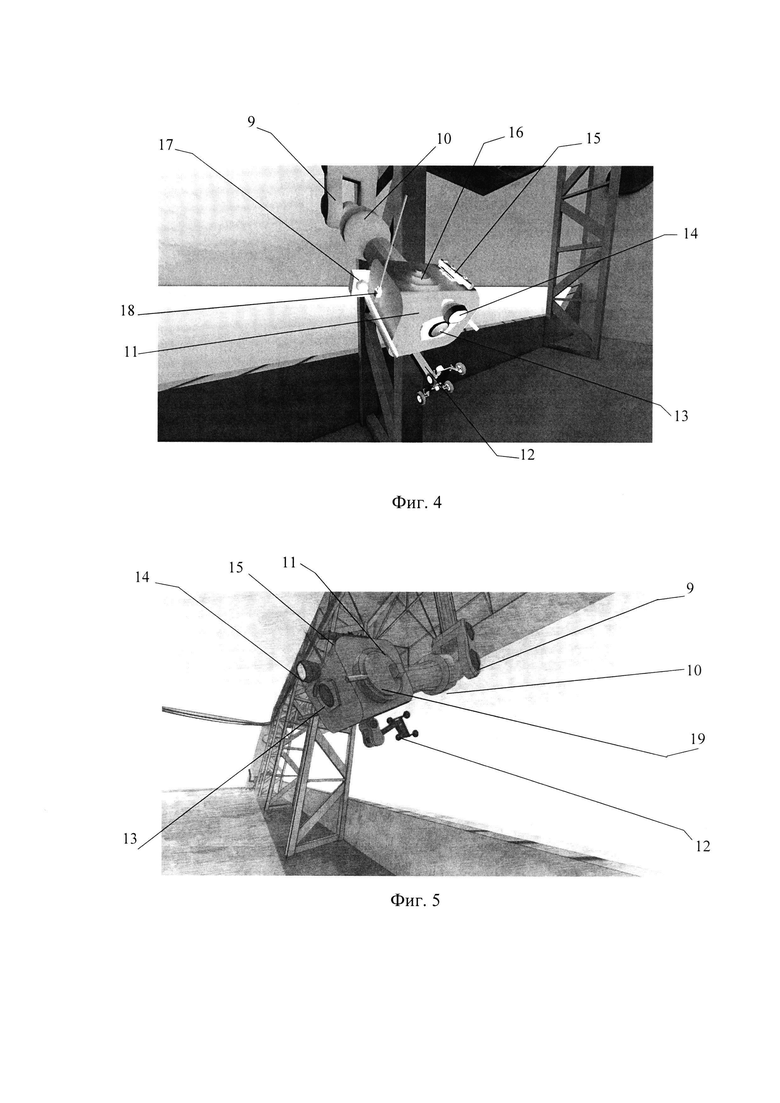
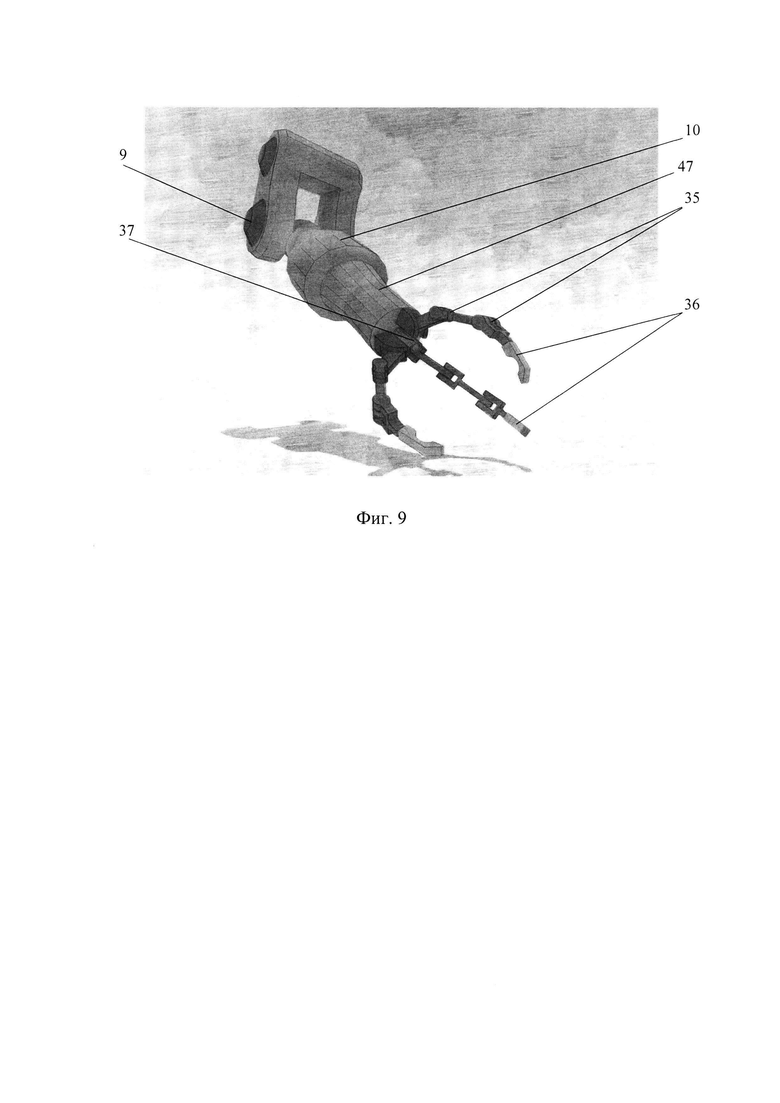
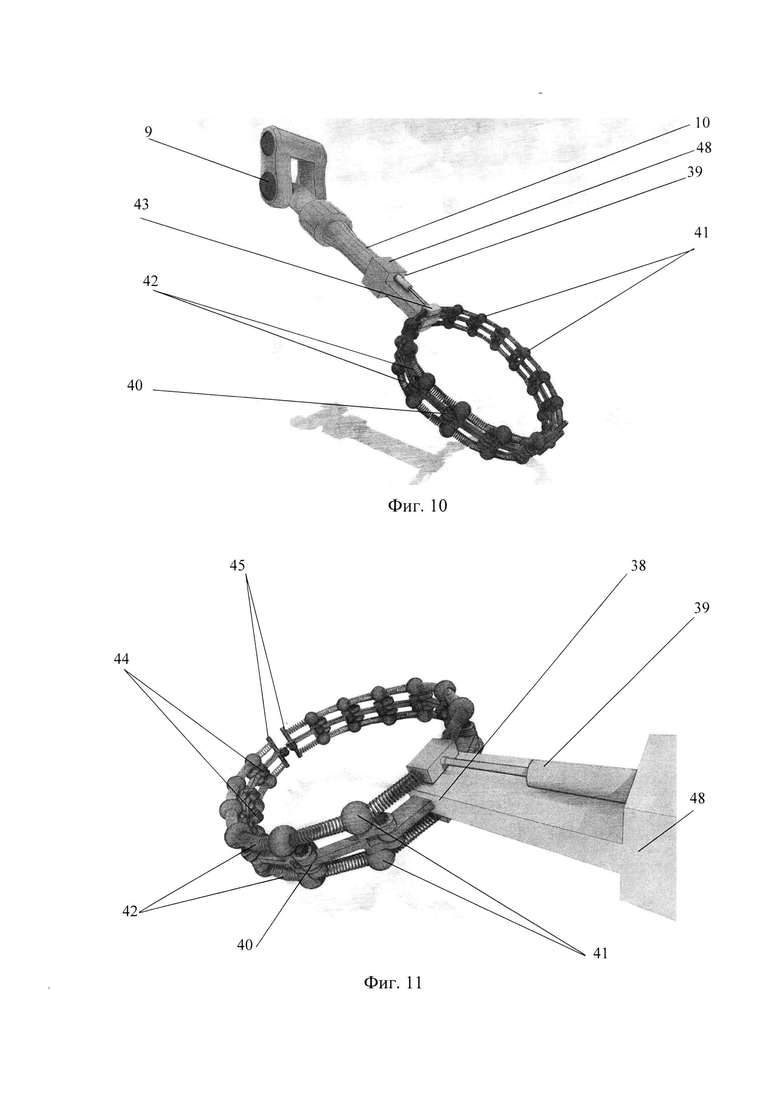
Сущность изобретения поясняется чертежами, где на фиг. 1, фиг. 2 представлен многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении с элементами на платформе, на фиг. 3. представлено положение ведущих и вспомогательных колес. На фиг. 4 и фиг. 5 представлено многофункциональное периферийное устройство, являющееся рабочим органом робототехнического комплекса. На фиг. 6 представлено автоматизированное рабочее место оператора. На фиг. 7 изображено устройство насадки покраски, а на фиг. 8. вариант технического исполнения насадки покраски. На фиг. 9 представлена насадка с силомоментным очувствлением. На фиг. 10, 11 представлена насадка обжимного типа с датчиками дефектоскопа. На чертежах цифрами обозначены:
1 - платформа;
2 - изолированная направляющая с подпружиненной пластиной под напряжением для питания робота;
3 - цифровой модуль управления (компьютер со встроенным аккумулятором);
4 - изолированный контакт;
5 - рельсовые направляющие;
6 - блок питания;
7 - электромоторы;
8 - диагностический модуль (резервная система управления роботом и платформой);
9 - звенья манипулятора;
10 - пневмоцилиндры с телескопическим штоком;
11 - многофункциональное периферийное устройство(МФПУ);
12 - датчик ультразвукового дефектоскопа со стабилизатором;
13 - камера;
14 - источник УФ-излучения;
15 - лазерный дальномер;
16 - диагностический люк МФПУ;
17 - прибор для измерения параметров микроклимата (метеоскоп);
18 - антенное согласующее устройство;
19 - газоанализатор;
20 - ведущие колеса;
21 - вспомогательные ролики;
22 - цифровой модуль обработки сигнала с ультразвукового дефектоскопа;
23 - автоматизированное рабочее место оператора;
24 - заливной бак;
25 - заборная магистраль;
26 - выпускная магистраль;
27 - управляемый обратный клапан;
28 - поршень;
29 - электромагнит;
30 - ударная планка;
31 - регулятор;
32 - перекачивающий насос;
33 - шестиотводный распределительный коллектор;
34 - канал-сопло;
35 - узел подвижного механического пальца;
36 - губы;
37 - камера PTZ;
38 - основание насадки;
39 - пневмоцилиндр;
40 - подвижные звенья насадки обжимного типа;
41 - стальной шарик;
42 - пружина;
43 - проушина;
44 - датчики дефектоскопа;
45 - концы зацепления;
46 -насадка покраски (НП);
47 - насадка с силомоментным очувствлением;
48 - насадка обжимного типа с датчиками дефектоскопа.
Упомянутый робототехнический комплекс работает следующим образом: вдоль несущих колон с двух сторон с помощью болтовых соединений и уголковых профилей монтируются две рельсовые направляющие (5). Рельсовые направляющие образуют замкнутый контур, по своей форме напоминающий эллипс. Изолированная направляющая (2), покрытая диэлектрическим материалом прокладывается вдоль верхней рельсовой направляющей. В специальном профильном углублении изолированной направляющей (2), размещается подпружиненная металлическая пластина, которая лежит на пружинном блоке. Платформа (1) одевается на ведущие колеса платформы (20), предварительно установленные в рельсовые направляющие (5), одеваются вспомогательные ролики (21), которые крепятся к основанию платформы (1) с помощью болтовых соединений. Вслед за этим размещенные колеса стыкуют с электромоторами (7), установленные на платформе (1) в специальных защитных корпусах с воздушным охлаждением. Цифровой модуль управления (3), крепится на платформу (1) и состоит из компьютера, и другой необходимой электронной аппаратурой, защищенной стальным корпусом. Блок питания (6), основание изолированного контакта (4), диагностический модуль (8), цифровой модуль обработки сигнала с дефектоскопа (22) монтируется непосредственно на платформу (1) за счет специальных креплений. Изолированный контакт (4) соединяется с подпружиненной пластиной в изолированной направляющей (2) Выполняется подключение проводов от блока питания (6) к цифровому модулю управления (3) через распределительную шину. Манипулятор, состоящий из основания, вращательных звеньев манипулятора (9), поступательных звеньев (10), многофункционального периферийного устройства (11), монтируется на платформу (1) посредством применения соединительных креплений. Поступательные звенья (10) манипулятора выполнены в виде пневмоцилиндров с телескопическим штоком. На МФПУ (11) размещаются датчик ультразвукового дефектоскопа со стабилизатором (12), Камера (13), источник УФ-излучения (14), лазерный дальномер (15), диагностический люк (16), метеоскоп (17), антенное согласующее устройство (18), газоанализатор (19). У входа в сооружение в доступном месте оборудуется автоматизированное рабочее место оператора (23), состоящее из компьютера со специальным программным обеспечением, усилителя Wi-Fi сигнала и микрофона для приема звуковых команд от оператора. Для выполнения работ по окраске объекта и элементов конструкции сооружения используется насадка покраски (НП) (46), оборудована шестью баками (24) объемом триста пятьдесят миллилитров каждый. Внутри НП (46) находится система из двух магистралей, которые разделяются на заборную (25) и выпускную (26). Заборная магистраль (25) состоит из канала-сопла (34), управляемого обратного клапана (27), перекачивающего насоса (32), распределительного шестиотводного коллектора (33), выполненного в форме кольца, и баков (24). Выпускная магистраль состоит из баков (24), управляемого обратного клапана (27), системы подачи краски (28-31) и канала-сопла (34). Насадка с силомоментным очувствлением (47), оборудуется камерой PTZ (37), которая монтируется непосредственно у основания механических пальцев, тремя подвижными механическими пальцами, состоящими из трех подвижных частей, способных совершать движение в узлах своих соединений (35). Концы пальцев выполнены в форме губ (36), позволяющие добиться цепкого захвата нужного предмета, а также откручивать и закручивать болтовые соединения. Насадка обжимного типа с датчиками дефектоскопа (48) выполнена в форме ухвата, состоящего из двух взаимосвязанных подвижных цепей, жестко сцепленных у основания (38). Каждая цепь состоит из ряда подвижных звеньев (40), совершающих движение в одной плоскости. К каждому звену (40) приваривается по два стальных шарика (41) со сквозным отверстием. Пружина (42), зацепляется за конец первой цепи (45), продевается сквозь стальные шарики (42), далее через специальную проушину (43) штока от пневмоцилиндра (39) и зацепляется аналогичным способом за конец второй цепи (45). С внутренней стороны звеньев (40) в узлах соединения друг с другом располагаются датчики дефектоскопа (44). Насадки являются сменными рабочими органами манипулятора и закрепляются посредством шлицевого соединения. Платформа (1) с манипулятором (9) двигается по рельсовым направляющим (5). Питание робототехнического комплекса осуществляется по изолированной направляющей с подпружиненной пластиной (2) через изолированный контакт (4). Подача напряжения на подпружиненную пластину в изолированной направляющей (2) осуществляется с автоматизированного рабочего места оператора (23) посредством замыкания цепи через коммутационный аппарат с ручным приводом (рубильник). В случае пропадания питания робототехнический комплекс переходит в режим сна, в котором используется встроенный аккумулятор для поддержания работоспособности памяти, сохранения параметров конфигурации робота и системного таймера. За счет размещенного на платформе (1) блока питания со стабилизацией напряжения (5) обеспечивается стабильная подача питания без перепадов и скачков напряжения сети. При первом использовании робототехнического комплекса осуществляется построение 3D модели объекта специального назначения и окружающего пространства и наложение реальной картинки на эту модель. С помощью оператора осуществляется идентификация тех предметов, которые разрешено использовать и хранить в специальном сооружении, определяется их количество размер и маркировка. Происходит запись эталонной (исходной) модели в память цифрового модуля управления (3). Робототехнический комплекс, используя прибор для измерения параметров микроклимата (метеоскоп) (17) осуществляет с определенной периодичностью мониторинг температуры, относительной влажности, давления окружающей среды обрабатывает данные и по определенному алгоритму рассчитывает, каким образом условия внешней среды влияют на эксплуатацию и рабочее время узлов и механизмов специального объекта. Определяет расчетное время (Тто.расч) до следующего технического обслуживания. Время технического обслуживания (Тто.идеал.) закладывается исходя из идеальных условий эксплуатации. Тто.расч = Тто.идеал.-tусл, где tусл - время, вычисленное по специально разработанному для конкретного специального изделия алгоритму и зависящее от условий эксплуатации. Предлагаемый робототехнический комплекс осуществляет визуальный осмотр технического состояния объекта специального назначения и ультразвуковую диагностику высоконагруженных элементов с помощью многофункционального периферийного устройства (МФПУ) (11). МПФУ (11) осуществляет движение с помощью платформы (1) и звеньев манипулятора (9), имеет конкретный перечень задач в заданных оператором контрольных точках с определенной задачей проверки в этих точках. Во время перемещения от одной контрольной точки к другой осуществляется видео съемка объекта специального назначения с помощью цифровой камеры (13) и происходит его сравнение с эталонной моделью, в случае нахождения мест, отличающихся от эталонной модели, происходит их окрашивание в определенные цвета и оператор, анализируя метки обучает робота реагировать на них в будущем или нет. В случае если объект технического обслуживания (ремонта) имеет высоконагруженные узлы, такие как гидравлические домкраты, подъемная стрела и др., они обозначаются в контрольных точках и для них определяется задача ультразвуковой диагностики, которая осуществляется с помощью датчика ультразвукового дефектоскопа со стабилизатором (12). При помощи источника УФ-излучения (14), цифровой камеры (13) и системы анализа спектра УФ-диапазона, которая заложена в виде программного обеспечения робототехнического комплекса, определяет утечку горюче-смазочных материалов, хладагента, а также наличия на поверхности химических, биологических и других отравляющих веществ, зги участки выделяются цветовым сигналом, соответствующем степени опасности от более светлых тонов к более темным, тем самым определяются места возможных неисправностей, зон радиационного, биологического, химического и бактериологического заражения. С помощью газоанализатора (19) определяется наличие в окружающем воздухе повышенного содержания угарного, углекислого газа и других отравляющих веществ, делающих нахождение человека в помещении невозможным. При обнаружении источников возгорания или заражения, робототехнический комплекс определяет место, тип возгорания и осуществляет оповещение в виде сигнала тревоги. Используя диагностический люк (16), оператор РТК или лицо, отвечающее за устранение неисправностей и его техническое обслуживание, получает доступ к электронным компонентам содержимого МФПУ. При подключении специального сканера диагностики проблем и ошибок посредством USB (через гнездо, находящееся внутри МФПУ), возможно исправление программного сбоя данного рабочего органа без задействования диагностического модуля (8), расположенного на платформе (1). Робототехнический комплекс с помощью многофункционального периферийного устройства (МФПУ) (11) при вскрытии замков дверей перемещается к двери и осуществляет контроль за входящими в помещение людьми, идентифицирует их с помощью системы распознавания лиц, определяет возможность нахождения этих людей на объекте, осуществляет съемку и контролирует соблюдение правил и норм безопасности. После завершения работ, робот анализирует исходное состояние объекта, наличие материальных средств, которые должны находится на объекте и отсутствие посторонних предметов, которых в помещении быть не должно (таких как лакокрасочные материалы, минно-взрывные закладки и тд.), дает разрешение покинуть сооружение. В случае отклонения от нормы подает сигнал тревоги. При возникновении нештатных ситуаций и затруднения при решении того или иного вопроса, по голосовому запросу способен оперативно дать варианты решения исходя из создавшейся ситуации и имеющимися в наличии запасных частей и других необходимых средств. Имеет систему учета образов операций, которые описывают уже выполненные, выполняемые и предстоящие к выполнению работы, формирует данные по времени планового технического обслуживания и фактического исполнения операций. В случае отказа работоспособности РТК, предусмотрена его проверка параметров системы через диагностический модуль (8). Автоматизированное рабочее место оператора (23) предполагает собой программное обеспечение с удобным интерфейсом контроля выполняемых РТК операций и команд. Осуществление соединения, передачи и обработки информации с РТК реализуется по проводному или беспроводному каналу с защищенным доступом. НП (46) применяется для равномерного распыления лакокрасочных материалов и защитных составов по поверхностям объекта и сооружения. Канал-сопло (всасывающая трубка) (34) помещается в емкость с лакокрасочными материалами (ЛКМ). Далее, путем включения перекачивающего насоса (32), управляемый обратный клапан (27) открывается и начинается заполнение баков (25). Коллектор распределительный шестиотводный (33) обеспечивает равномерную подачу ЛКМ в равных долях в баки (25). После полного забора нужного количества ЛКМ, с помощью датчиков наполнения, расположенных в баках (25), срабатывает отключение системы заборной магистрали. Далее, оператор за АРМ (23) задает план покраски, и РТК, оснащенный НП (46), перемещается к месту выполнения работ. Посредством открытия управляемого обратного клапана (27) в составе выпускной магистрали (26) и подачи питания на электромагнит (29), выпускная магистраль (26) приходит в действие. За счет импульсного режима работы электромагнита (29), ударная планка (30) притягивается магнитом и толкает поршень (28) вперед, вызывая его возвратно-поступательное движение. За счет регулятора (31), реализуется ограничение подвижности ударной планки (30), совершающей колебательные движения. Таким образом обеспечивается изменение скорости подачи краски и размера площади покраски. Выпускная магистраль (26) в отношении движения ЛКМ по патрубкам является естественной и осуществляется за счет изменения угла наклона, определяющего направление хода частиц ЛКМ. Заборная магистраль (25) является принудительной, так как обусловлена действием перекачивающего насоса (32). Насадка с силомоментным очувствлением (47) выполняет вспомогательные задачи по перемещению различных грузов, фиксации и удержанию ремонтных принадлежностей при выполнении ручных работ, раскручивает и закручивает болтовые соединений, а также другие действия в роли третьей руки. За счет монтируемой камеры PTZ (37), управляется оператором посредством АРМ (23). В случае использования, как третьей руки, благодаря передаче визуальной информации камерой (37) и обработке ее через специальный алгоритм принятия решений, достигается своевременное обнаружение возможных опасностей, их предупреждение и исключение при выполнении ручных работ совместно с человеком. Насадка обжимного типа с датчиками дефектоскопа (48) применяется для детальной диагностики однородности структуры и коррозионного поражения высоконагруженных элементов больших размеров цилиндрической формы. За счет связи пружины (42) со штоком пневмоцилиндра (39) через проушину (43) достигается разжимание цепей, путем стремления пружины (42) вернуться в исходное состояние. Деформация, образующаяся от движения штока пневмоцилиндра (39) вызывает силу упругости, суммарный вектор которой располагается на средней линии каждой цепи и направлен в сторону вектора перемещения проушины (43). После необходимого разжимания, насадка обжимного типа с датчиками дефектоскопа (48) обхватывает обследуемое тело, и шток пневмоцилиндра (39) возвращается в исходное положение, смыкая цепи друг с другом. При обследование цилиндрического тела датчики (44) плотно прилегают к нему, позволяя проводить качественную ультразвуковую диагностику.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU 125509, 2012.
2. RU 2364500, 2007.
3. RU 2574547, 2014.
4. RU 2555083, 2012.
5. US 2018/0047275 Al, 2018
6. RU 2525008, 2009.
7. ГОСТ 18322-2016 пункт 2.1.11.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Робототехническая система сервисного космического аппарата с силомоментной обратной связью | 2015 |
|
RU2620540C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СИСТЕМ ЭЛЕКТРИЧЕСКОГО ОБОГРЕВА ТРУБОПРОВОДОВ | 2021 |
|
RU2766373C1 |
| Робототехнический комплекс "Робот-швея" | 2024 |
|
RU2836073C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |

Изобретение относится к области робототехники и может быть использовано при создании многофункциональных комплексов для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении. Комплекс содержит автоматизированное рабочее место оператора, платформу с электромоторами, а также с ведущими и вспомогательными колесами, блоком питания, изолированную направляющую с подпружиненной пластиной и изолированным контактом, диагностический модуль, цифровой модуль управления, две рельсовые направляющие, установленный на платформе многозвенный манипулятор с рабочим органом, который выполнен в виде набора сменных насадок, включающего многофункциональное периферийное устройство, насадку для покраски, насадку с силомоментным очувствлением и насадку обжимного типа с датчиками ультразвукового дефектоскопа. Использование изобретения позволяет расширить функциональные и технологические возможности комплекса. 11 ил.
Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении, содержащий автоматизированное рабочее место оператора, платформу с электромоторами и ведущими колесами, выполненную с возможностью перемещения, установленный на платформе многозвенный манипулятор с рабочим органом, многофункциональное периферийное устройство (МФПУ), включающее в себя цифровую видеокамеру, лазерный дальномер, газоанализатор, источник ультрафиолетового излучения, антенно-согласующее устройство и метеоскоп, размещенные на платформе цифровой модуль управления со встроенным аккумулятором, блок питания, модуль обработки сигнала ультрафиолетового спектра и диагностический модуль, отличающийся тем что он снабжен двумя параллельными замкнутыми линейными рельсовыми направляющими, расположенными на заданной высоте от пола, причем вдоль верхней рельсовой направляющей проложена изолированная направляющая, в профильном углублении которой размещена подпружиненная металлическая пластина, соединенная с изолированным контактом, выполненным с возможностью подачи через него электропитания, а упомянутые ведущие колеса платформы вместе с дополнительно установленными на платформе вспомогательными роликами размещены в каналах упомянутых рельсовых направляющих с возможностью перемещения платформы по этим направляющим, при этом рабочий орган манипулятора выполнен в виде набора сменных насадок, включающего в себя насадку с упомянутым МФПУ с возможностью визуальной диагностики технического состояния окружающего пространства сооружения и находящегося в нем крупногабаритного объекта, насадку для покраски с возможностью окрашивания элементов конструкции сооружения и крупногабаритного объекта при отклонении их состояния от эталонного, насадку с силомоментным очувствлением с возможностью откручивания и закручивания болтовых соединений и насадку обжимного типа с датчиками ультразвукового дефектоскопа с возможностью определения дефектов элементов конструкции сооружения и крупногабаритного объекта, который связан с цифровым модулем обработки сигнала с ультразвукового дефектоскопа, расположенным на платформе.
| РОБОТ ДЛЯ НЕБЛАГОПРИЯТНЫХ УСЛОВИЙ ВНЕШНЕЙ СРЕДЫ | 2009 |
|
RU2525008C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОБЫТИЯ | 2015 |
|
RU2681353C2 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| US 2018047275 A1, 15.02.2018 | |||
| JP 2020181589 A, 05.11.2020 | |||
| CN 210780888 U, 16.06.2020. | |||

