Область техники
Настоящее изобретение относится к области систем и датчиков для мониторинга угловой скорости оси железнодорожного транспортного средства; в частности, данное изобретение относится к системе и способу определения угловой скорости оси железнодорожного транспортного средства.
Предшествующий уровень техники
В известных системах и способах, которые обычно используются на вагоне поезда для измерения угловой скорости ω оси, обычно предусматривают наличие, по меньшей мере, одного зубчатого фонического колеса, сопряженного с осью, и наличие датчика, выполненного с возможностью распознавать частоту прохождения зубцов фонического колеса перед таким датчиком (датчик скорости).
Интервал времени между прохождением двух последовательных зубцов перед датчиком можно назвать «периодом зубца» (Ttooth). Количество зубцов, которые имеются на фоническом колесе можно обозначить как nteeth.
Умножением параметров Ttooth и Nteeth можно получить период вращения фонического колеса, который также является периодом вращения оси и колес.
Twheel = Ttooth * nteeth
Угловая скорость ω колес рассчитывается, исходя из периода вращения, по следующему соотношению.
Недостатком таких систем является то, что они требуют специальных (отдельных) компонентов, используемых исключительно с целью определения угловой скорости оси. Такие компоненты предусматривают наличие фонического колеса, датчика, электронных частей, программного обеспечения для сбора данных, ряда соединительных проводов, экранированных от электромагнитных помех (помеха, которая может искажать данные датчика для измерения частоты). Эти компоненты используются с единственной целью — для определения угловой скорости оси, что связано с определенными недостатками с точки зрения затрат времени и средств на их монтаж.
Кроме того, предшествующий уровень техники предусматривает установку на оси и/или колесе железнодорожного транспортного средства одного или нескольких тензометрических датчиков (в различных конфигурациях, например, полного моста Уитстона, «полумоста» или «четверти моста») для оценки контактного усилия между колесами и рельсом, исходя из деформации оси.
В настоящее время оценка контактного усилия между колесом и рельсом имеет своей единственной главной целью мониторинг состояния инфраструктуры и подвижного состава, а также относительное планирование мероприятий по их техническому обслуживанию и/или корректирующих вмешательств (как показано на блок-схеме на Фиг. 4).
Соответственно, в настоящее время известные системы и процессы, которые предусматривают установку на оси и/или колесе железнодорожного транспортного средства одного или нескольких датчиков деформации, не предусматривают возможность использования измерений, выполненных с помощью упомянутых одного или нескольких тензометрических датчиков для определения угловой скорости оси и, следовательно, поступательной скорости транспортного средства.
Сущность изобретения
С учетом вышесказанного, целью настоящего изобретения является обеспечение измерения угловой скорости оси и, следовательно, расчета поступательной скорости транспортного средства без использования специальных дополнительных датчиков угловой скорости.
Для получения такого результата предложена система определения угловой скорости оси железнодорожного транспортного средства.
Эта система содержит схему обнаружения деформации, сопряженную с осью железнодорожного транспортного средства. Схема обнаружения деформации предусмотрена для выявления динамики изменения изгибной деформации оси, проявляющейся с течением времени в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс.
Система для определения величины угловой скорости дополнительно содержит средство управления, выполненное с возможностью оценки угловой скорости оси в зависимости от частоты вращения, полученной на основании динамики изменения величины изгибной деформации оси, которая выявляется схемой обнаружения деформации.
Упомянутые выше и другие задачи решаются, а преимущества достигаются, согласно первому объекту настоящего изобретения – системой определения угловой скорости оси железнодорожного транспортного средства, имеющей признаки, заявленные в п.1 формулы изобретения, и способом определения угловой скорости оси железнодорожного транспортного средства, имеющего признаки, заявленные в п.8 формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения заявлены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Далее будут описаны функциональные и структурные признаки некоторых предпочтительных вариантов осуществления системы и способа определения угловой скорости оси железнодорожного транспортного средства в соответствии с заявленым изобретением и со ссылками на прилагаемые чертежи, на которых:
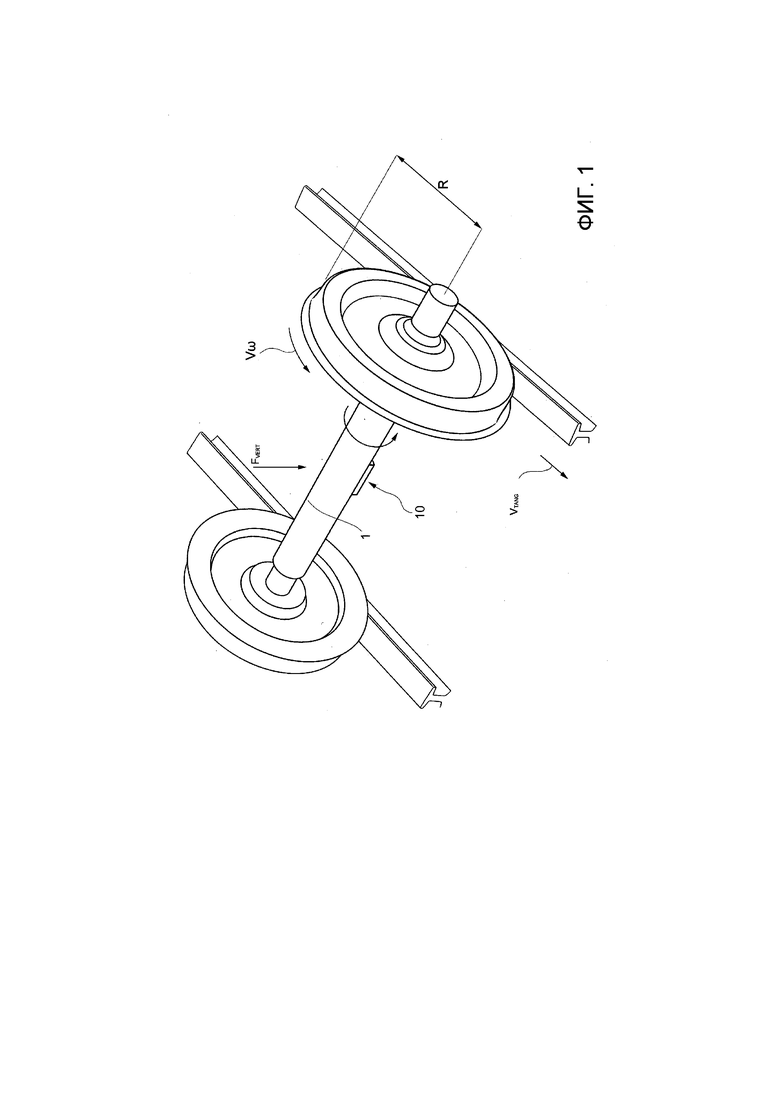
– на Фиг. 1 показана ось железнодорожного транспортного средства, с которой сопряжена схема обнаружения деформации;
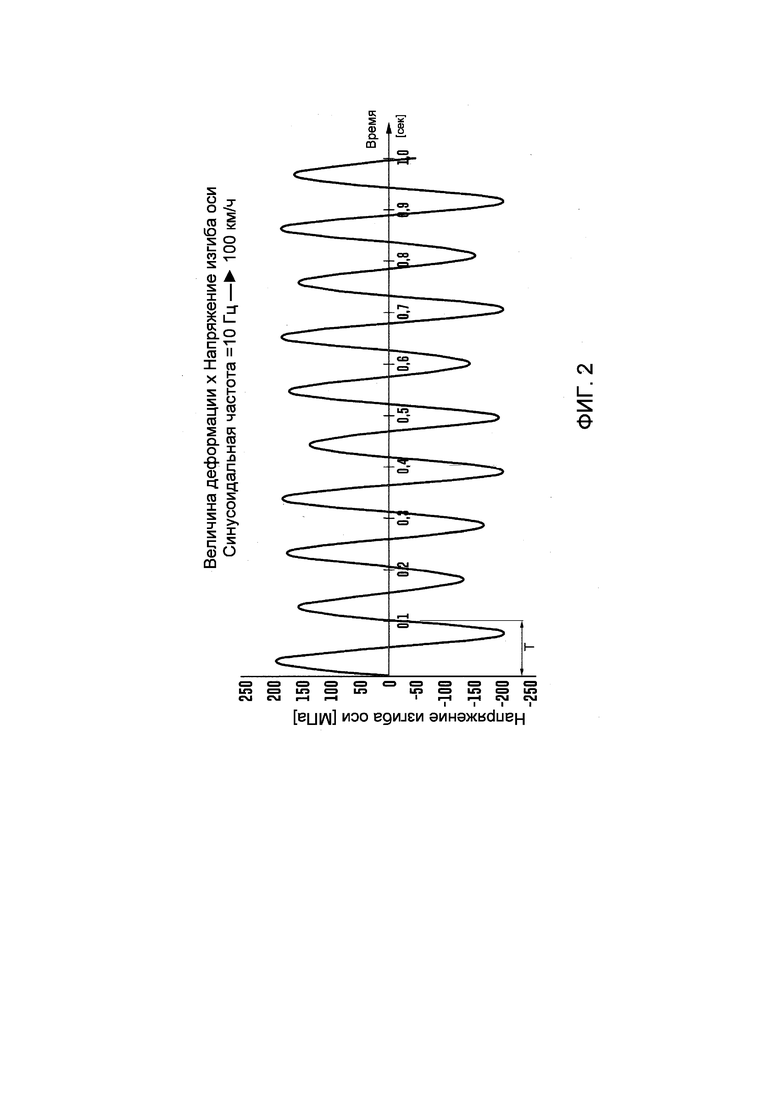
– на Фиг. 2 на примере показан сигнал, сформированный схемой обнаружения деформации, которая подверглась деформации изгиба во время движения состава;
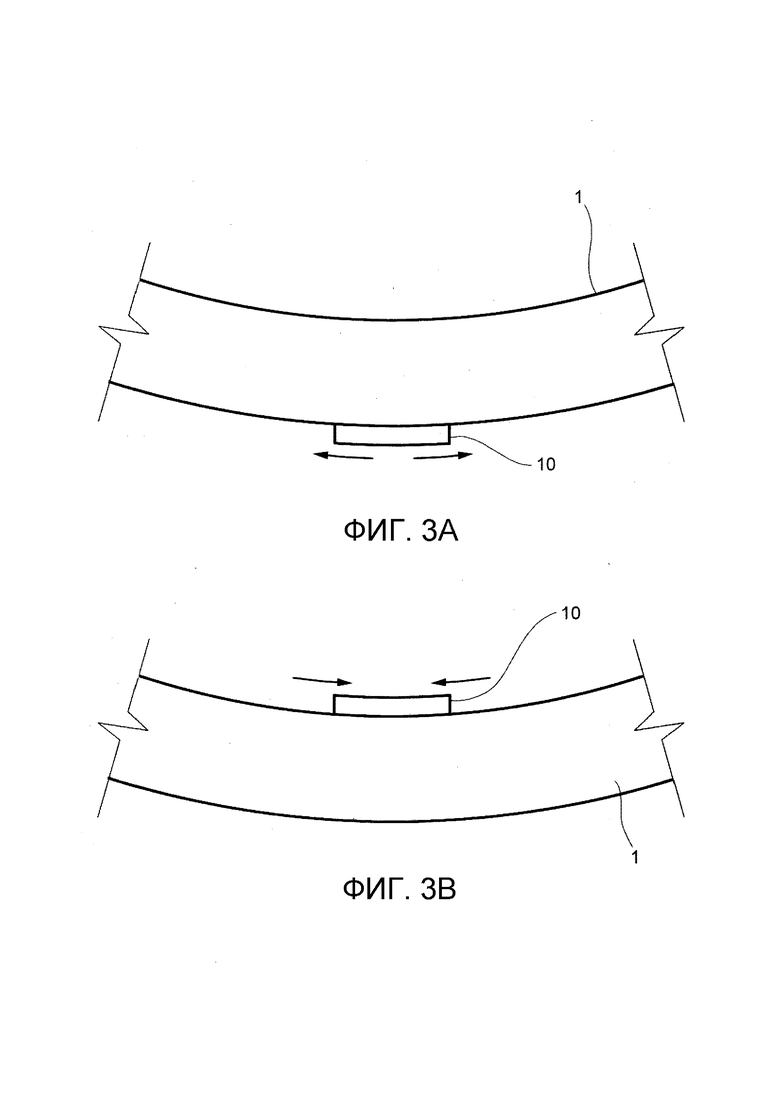
– на Фиг. 3А на примере показан случай, когда схема обнаружения деформации расположена на нижней поверхности оси (нижняя часть), а усилие нагрузки вызывает деформацию удлинения;
– на Фиг. 3В на примере показан случай, когда схема обнаружения деформации расположена на верхней поверхности оси (верхняя часть), а усилие нагрузки вызывает деформацию сжатия; и
– на Фиг. 4 показана блок-схема, иллюстрирующая этапы, как правило, выполняемые системами, реализованными согласно предыдущему уровню техники.
Подробное описание
Перед подробным разъяснением множества вариантов осуществления заявленного изобретения следует отметить, что данное изобретение не ограничено в своем применении описанием конструкции и конфигурацией компонентов, которые приведены в последующем описании или показаны на чертежах. Изобретение может иметь другие варианты осуществления, и может быть реализовано или практически осуществлено различными способами. Также следует понимать, что формулировки и терминология предназначены для наглядности, и не должны рассматриваться как ограничивающие. Использование слов «включать в себя» и «содержать», а также их вариаций, имеет своей целью включение элементов и их эквивалентов, перечисленных после этих слов, а также дополнительных элементов и их эквивалентов.
Кроме того, во всем настоящем описании и формуле изобретения термины и выражения, указывающие положения и ориентации, такие как «продольный», «поперечный», «вертикальный» или «горизонтальный», указаны относительно направления движения состава.
На Фиг.1, в качестве примера показана ось железнодорожного транспортного средства, с которой сопряжена схема 10 обнаружения деформации, относящаяся к системе для определения угловой скорости железнодорожного транспортного средства согласно настоящему изобретению.
В первом варианте осуществления настоящего изобретения система определения угловой скорости Vω оси железнодорожного транспортного средства содержит схему 10 обнаружения деформации, сопряженную с осью 1 железнодорожного транспортного средства.
Схема 10 обнаружения деформации сопряжена с осью 1 железнодорожного транспортного средства и предназначена для выявления динамики изменения изгибной деформации оси 1, проявляющейся с течением времени в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс.
Система для определения величины угловой скорости Vω железнодорожного транспортного средства дополнительно содержит средство управления, предназначенное для оценки угловой скорости Vω оси в зависимости от частоты вращения f, полученной на основании динамики изменения величины изгибной деформации оси 1, выявленной схемой 10 обнаружения деформации.
Исходя из того факта, что два колеса, имеющие радиус R, сопряжены с осью 1, а упомянутое средство управления может быть дополнительно выполнено с возможностью преобразования упомянутого значения угловой скорости Vω оси в величину тангенциальной скорости Vtang железнодорожного транспортного средства с учетом радиуса колес R.
Формула, используемая для оценки угловой скорости Vω оси в зависимости от частоты f, полученной на основании динамики изменения величины изгибной деформации оси 1, выявленной схемой 10 обнаружения деформации, может иметь, например, следующий вид:
Vω = 2 *π * f
Формула, используемая для преобразования упомянутого значения угловой скорости Vω оси в тангенциальную скорость Vtang, может иметь, например, следующий вид:
Vtang = Vω * Радиус колеса
Средство управления может быть расположено, например, в непосредственной близости или прямо в составе схемы 10 обнаружения деформации. Как вариант, это средство управления может быть расположено удаленно относительно схемы 10 обнаружения деформации в составе других бортовых блоков управления транспортного средства, или в составе станций управления, удаленных относительно железнодорожного транспортного средства. Следовательно, средство управления может принимать данные от схемы 10 обнаружения деформации либо через специальную проводку, либо через беспроводное соединение.
Таким средством управления может быть, например, но не обязательно, блок управления, процессор или микроконтроллер.
В соответсвии с Фиг. 2, исходя из сигнала, формируемого схемой 10 обнаружения деформации, которая подвергается деформации изгиба во время движения железнодорожного транспортного средства, система для определения угловой скорости Vω оси железнодорожного транспортного средства может быть способна оценить величину тангенциальной скорости Vtang транспортного средства.
Схема 10 обнаружения деформации может содержать, по меньшей мере, одно средство с тензометрическим датчиком и/или, по меньшей мере, одно средство с пьезоэлектрическим датчиком.
Средство с тензометрическим датчиком или пьезоэлектрическим датчиком могут быть расположены параллельно оси 1.
Могут быть использованы несколько средств с тензометрическими датчиками или пьезоэлектрическим датчиком, что позволит повысить точность измерения.
Когда транспортное средство не двигается, изгибная деформация оси соотносится со статической нагрузкой на ось от самого транспортного средства.
В соответствии с Фиг. 3А и 3В, когда схема 10 обнаружения деформации расположена на верхней поверхности оси 1 (верхняя часть), усилие нагрузки вызывает деформацию сжатия. В случае, когда схема 10 обнаружения деформации расположена на нижней поверхности оси (нижняя часть), усилие нагрузки вызывает деформацию удлинения.
Во время движения железнодорожного транспортного средства вращение оси 1 обуславливает циклическое перемещение схемы 10 обнаружения деформации, которая жестко связана с упомянутой осью 1, из положения на верхней поверхности оси (верхней части) в положение на нижней поверхности оси (нижняя часть).
Соответственно, во время движения железнодорожного транспортного средства выходной сигнал схемы 10 обнаружения деформации (связанный с вертикальным усилием Fvert) будет иметь вид синусоиды со средним значением, равным нулю, при этом частота f равна частоте вращения оси транспортного средства, а амплитуда пропорциональна изгибным напряжениям, которые возникают в оси («толчки»).
Как показано на Фиг. 2, Т является примером периода выходного сигнала схемы 10 обнаружения деформации. Частота f будет соответствовать обратной величине периода T. Этот период T изменяется в зависимости от скорости железнодорожного транспортного средства.
Частота f выходного сигнала схемы 10 обнаружения деформации, соответствующая динамике изменения величины изгибной деформации оси 1, является частотой f, которая может быть использована для оценки величины Vω угловой скорости оси.
Обработка этого сигнала может быть использована для оценки угловой скорости Vω оси, и, следовательно, при известном радиусе колеса, тангенциальной скорости Vtang железнодорожного транспортного средства.
Другими словами, средство управления может быть выполнено с возможностью определения тангенциальной скорости Vtang железнодорожного транспортного средства, исходя из частоты f, полученной на основании динамики изменения величины изгибной деформации оси 1, выявленной схемой 10 обнаружения деформации, и радиуса колеса R.
Настоящее изобретение также относится к способу определения угловой скорости Vω оси железнодорожного транспортного средства, который содержит этапы:
- выявление динамики изменения изгибной деформации оси 1 в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс;
- оценка величины угловой скорости Vω оси в зависимости от частоты f, полученной на основании выявленной динамики изменения величины изгибной деформации оси 1.
Кроме того, на основании предположения о том, что с осью 1 сопряжены два колеса, имеющие радиус R, процесс определения угловой скорости Vω оси железнодорожного транспортного средства может дополнительно содержать этап:
- преобразования упомянутого значения угловой скорости Vω оси в значение тангенциальной скорости Vtang железнодорожного транспортного средства в зависимости от радиуса R колес.
Также, что касается процесса определения угловой скорости оси железнодорожного транспортного средства, формула, используемая для оценки значения угловой скорости Vω оси в зависимости от частоты f, полученной на основании динамики изменения величины изгибной деформации оси 1, выявленная схемой 10 обнаружения деформации, и формула, используемая для преобразования упомянутого значения Vω угловой скорости оси в значение Vtang тангенциальной скорости, может быть, например, той, которая описана выше для системы определения угловой скорости оси железнодорожного транспортного средства.
Достигнутое преимущество состоит в том, что благодаря использованию схемы обнаружения деформации можно оценить угловую скорость оси железнодорожного транспортного средства, исходя из изгибных деформаций такой оси.
Были описаны различные объекты и варианты осуществления системы для определения угловой скорости Vω оси железнодорожного транспортного средства и способа определения угловой скорости Vω оси железнодорожного транспортного средства согласно данному изобретению. Предполагается, что каждый вариант осуществления может быть объединен с любым другим вариантом осуществления. Кроме того, данное изобретение не ограничивается описанными вариантами изобретения, и может быть изменено в пределах объема, ограниченного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для определения величины сцепления между рельсом и колесом железнодорожного транспортного средства и соответствующий способ такого определения | 2018 |
|
RU2766481C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| Способ и устройство для определения расположения центра тяжести груженого железнодорожного вагона | 2021 |
|
RU2784784C1 |
| Способ тензометрического контроля поверхности катания колес железнодорожных вагонов | 2023 |
|
RU2803609C1 |
| Способ контроля поверхности катания железнодорожных колёс в движении | 2016 |
|
RU2625256C1 |
| Устройство сбора информации и способ оценки результатов взаимодействия между колесом и рельсом | 2017 |
|
RU2682567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2524805C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2513338C1 |
Группа изобретений относится к измерению угловой скорости оси железнодорожного транспортного средства. Система определения угловой скорости  оси железнодорожного транспортного средства содержит схему обнаружения деформации, сопряженную с осью железнодорожного транспортного средства, и средство управления. Схема обнаружения деформации выполнена с возможностью выявления динамики изменений величины изгибной деформации оси, в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс. Средство управления выполнено с возможностью оценки величины угловой скорости оси в зависимости от частоты f, полученной на основании динамики изменений величины изгибной деформации оси, выявленной с помощью схемы обнаружения деформации. Также заявлен способ определения угловой скорости оси железнодорожного транспортного средства, заключающийся в том, что выявляют динамику изменения изгибной деформации оси и оценивают величину угловой скорости оси в зависимости от частоты f, полученной на основании выявленной динамики изменения величины изгибной деформации оси. Технический результат заключается в обеспечении измерения угловой скорости оси без использования дополнительных датчиков угловой скорости. 2 н. и 7 з.п. ф-лы, 5 ил.
оси железнодорожного транспортного средства содержит схему обнаружения деформации, сопряженную с осью железнодорожного транспортного средства, и средство управления. Схема обнаружения деформации выполнена с возможностью выявления динамики изменений величины изгибной деформации оси, в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс. Средство управления выполнено с возможностью оценки величины угловой скорости оси в зависимости от частоты f, полученной на основании динамики изменений величины изгибной деформации оси, выявленной с помощью схемы обнаружения деформации. Также заявлен способ определения угловой скорости оси железнодорожного транспортного средства, заключающийся в том, что выявляют динамику изменения изгибной деформации оси и оценивают величину угловой скорости оси в зависимости от частоты f, полученной на основании выявленной динамики изменения величины изгибной деформации оси. Технический результат заключается в обеспечении измерения угловой скорости оси без использования дополнительных датчиков угловой скорости. 2 н. и 7 з.п. ф-лы, 5 ил.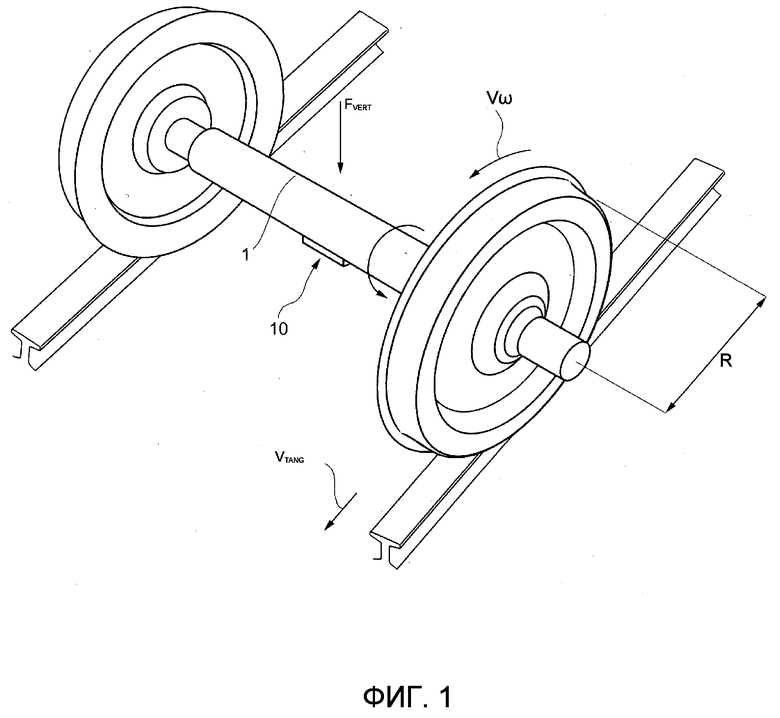
1. Система определения угловой скорости  оси (1) железнодорожного транспортного средства, содержащая:
оси (1) железнодорожного транспортного средства, содержащая:
- схему (10) обнаружения деформации, сопряженную с осью (1) железнодорожного транспортного средства; упомянутая схема (10) обнаружения деформации выполнена с возможностью выявления динамики изменений величины изгибной деформации оси (1), в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс;
- средство управления, выполненное с возможностью оценки величины угловой скорости оси в зависимости от частоты f, полученной на основании динамики изменений величины изгибной деформации оси (1), выявленной с помощью схемы (10) обнаружения деформации.
2. Система определения угловой скорости оси железнодорожного транспортного средства по п. 1, в которой два колеса, имеющие радиус (R), сопряжены с осью (1), а упомянутое средство управления дополнительно выполнено с возможностью преобразования упомянутого значения угловой скорости оси в значение тангенциальной скорости (Vtang) железнодорожного транспортного средства с учетом радиуса колес (R).
3. Система для определения угловой скорости оси железнодорожного транспортного средства по п. 1 или 2, в которой формула для оценки величины угловой скорости оси в зависимости от частоты вращения f, полученной на основании динамики изменений величины изгибной деформации оси (1), выявленной схемой (10) обнаружения деформации, имеет вид:
 .
.
4. Система для определения угловой скорости оси железнодорожного транспортного средства по любому из предшествующих пунктов, в которой формула, используемая для преобразования значения угловой скорости оси в значение тангенциальной скорости (Vtang) железнодорожного транспортного средства, имеет вид:
Vtang= *радиус колеса.
*радиус колеса.
5. Система для определения угловой скорости оси железнодорожного транспортного средства по любому из предшествующих пунктов, в которой схема (10) обнаружения деформации содержит, по меньшей мере, одно средство с тензометрическим датчиком.
6. Система для определения угловой скорости оси железнодорожного транспортного средства по любому из предшествующих пунктов, в которой схема (10) обнаружения деформации содержит, по меньшей мере, одно средство с пьезоэлектрическим датчиком.
7. Система для определения угловой скорости оси железнодорожного транспортного средства по п. 5 или 6, в которой средство с тензометрическим датчиком или с пьезоэлектрическим датчиком расположены параллельно оси (1).
8. Способ определения угловой скорости оси (1) железнодорожного транспортного средства, содержащий этапы:
- выявление динамики изменения изгибной деформации оси (1) в зависимости от величины нормальной нагрузки, передаваемой от оси на рельс;
- оценка величины угловой скорости оси в зависимости от частоты f, полученной на основании выявленной динамики изменения величины изгибной деформации оси (1).
9. Способ определения угловой скорости оси железнодорожного транспортного средства по п. 8, в котором два колеса, имеющие радиус (R), сопряжены с осью (1), и такой способ дополнительно содержит этап:
- преобразования упомянутого значения угловой скорости оси в значение тангенциальной скорости (Vtang) в зависимости от радиуса (R) колес.
| US 3718040 A, 27.02.1973 | |||
| ИНДУКЦИОННАЯ ПЕЧЬ ДЛЯ ПЛАВКИ АЛЮМИНИЯ И ЕГО СПЛАВОВ | 0 |
|
SU168388A1 |
| WO 2006128878 A1, 07.12.2006 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2110803C1 |

