Область, к которой относится изобретение
Изобретение относится к сельскохозяйственному машиностроению, в частности к роботизированному транспортному средству, предназначенному для автоматического удаления сорняков пропашных культур режущим инструментом в рядках и междурядьях.
Уровень техники
Известен беспилотный робот для лазерной обработки растений, содержащий раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и установленный на раме модуль лазерной обработки растений с технологическим адаптером для установки высоты расположения упомянутого модуля в соответствии с высотой обрабатываемых растений (патент РФ №2634104, опубл. 2017).
Недостатки – сложность и дороговизна конструкции, возможность поражения лазером культурных растений, отсутствие возможности уничтожения сорных растений в рядке и междурядьях.
Известен беспилотный робот для магнитно-импульсной обработки растений, включающий раму, управляемые колеса, систему управления и навигации с контрольно-измерительными приборами и систему питания, при этом он снабжен установленными на раме адаптером и модулем магнитно-импульсной обработки растений, выполненным в виде магнитно-импульсного активатора с индуктором (патент РФ №2630397, опубл. 2017).
Недостатки - обработка только низкорастущих растений, отсутствует возможность выбора режимов работы в зависимости от культуры, отсутствие возможности автоматической адаптации к высоте растений, риск поражения магнито-импульсным полем культурных растений.
Известен робот-пропольщик, содержащий раму, управляющие колеса, систему управления и навигации с контрольно-измерительными приборами, систему питания, три исполнительных привода, рабочий орган с двигателем постоянного тока и линейным приводом, датчик технического зрения, три направляющие с каретками, причем две направляющие выполнены в виде круглого стержня и крепятся к раме посредством опор, расположенных на концах направляющих, оси которых параллельны друг другу в горизонтальной плоскости и направлены в сторону движения робота-пропольщика, а третья направляющая выполнена в виде прямоугольного стержня, имеет жесткое крепление с каретками первой и второй направляющих (патент РФ №2703092, опубл. 2019).
Недостатки – использование механических передач в виде кареток для перемещения исполнительного механизма, требующих повышенной мощности источника постоянного тока, использование актуатора, содержащего электродвигатель, передаточный механизм и подвижный шток для перемещения рабочего органа для удаления сорняков.
Наиболее близкий по технической сущности к предлагаемой конструкции и принятый авторами за прототип является робот-пропольщик, который содержит раму, управляющие колеса, систему управления и навигации с контрольно-измерительными приборами, систему питания, две шарико-винтовые передачи, каждая из которых состоит из винта, гайки и привода, датчик технического зрения, две направляющие с каретками, одна из которых выполнена в виде круглого стержня, а другая - прямоугольного стержня, рабочий орган с двигателем постоянного тока и линейным приводом (патент РФ № 2703775, опубл. 2019).
Недостатки – использование для перемещения исполнительного механизма шарико-винтовых передач, применение актуатора для удаления сорняков, снижение возможности механического точечного удаления сорняков в рядке, повышенное потребление электроэнергии от источника постоянного тока.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа как наиболее близкого по совокупности признаков аналога позволила выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Раскрытие изобретения
Технический результат предлагаемого изобретения сводится к разработке беспилотного робота-пропольщика для повышения качества прополки рядков и междурядий пропашных культур от сорных растений, уменьшения травмирования культурных растений за счет применения обработки высокой точности, снижения энергетических затрат при удалении сорных растений.
Беспилотный робот-пропольщик содержит раму, на которой установлены система управления и навигации, аккумуляторные батареи, система обнаружения и распознавания растений, четыре колеса для перемещения, каждое из которых содержит стойку с поворотным механизмом и приводится в действие при помощи отдельного двигателя постоянного тока через вращающийся вал, система управления работой цилиндрических линейных электродвигателей, два цилиндрических линейных электродвигателя, причем первый цилиндрический линейный электродвигатель расположен в раме горизонтально и включает подвижный статор и неподвижный наборный якорь, причем неподвижный наборный якорь состоит из магнитных втулок и немагнитных колец, второй цилиндрический линейный электродвигатель является вертикальным, присоединенным перпендикулярно к первому цилиндрическому линейному электродвигателю, и включающим в себя неподвижный статор и подвижный наборный якорь, причем подвижный наборный якорь состоит из магнитных втулок и немагнитных колец, в нижней части подвижного наборного якоря прикреплен двигатель постоянного тока, приводящий во вращение через вал режущий инструмент для механического удаления сорняков.
Краткое описание чертежей
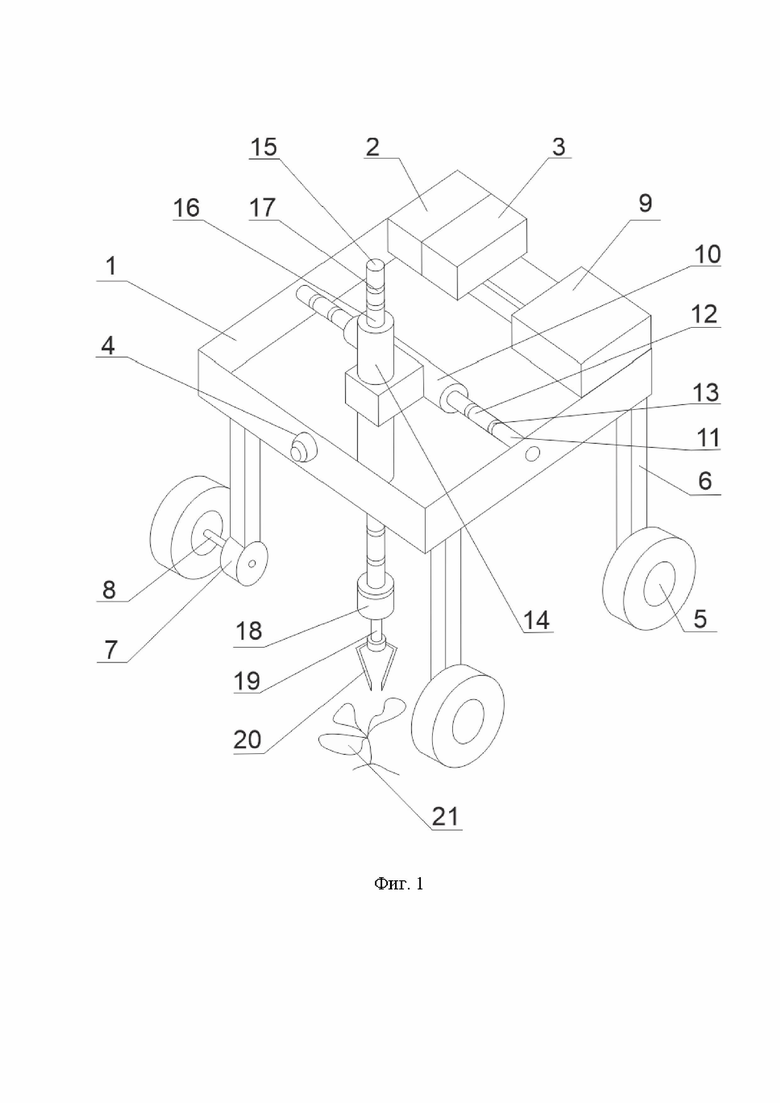
На фиг. 1 представлен общий вид беспилотного робота-пропольщика.
Осуществление изобретения
Беспилотный робот-пропольщик содержит раму 1, на которой установлены система управления и навигации 2, аккумуляторные батареи 3, система обнаружения и распознавания растений 4, четыре колеса 5 для перемещения, каждое из которых содержит стойку 6 с поворотным механизмом (на чертеже не обозначен) и приводится в действие при помощи отдельного двигателя постоянного тока 7 через вращающийся вал 8, система управления работой цилиндрических линейных электродвигателей 9, два цилиндрических линейных электродвигателя (на чертеже не обозначены), причем первый цилиндрический линейный электродвигатель расположен в раме 1 горизонтально и включает подвижный статор 10 и неподвижный наборный якорь 11, причем неподвижный наборный якорь 11 состоит из магнитных втулок 12 и немагнитных колец 13, второй цилиндрический линейный электродвигатель является вертикальным, присоединенным перпендикулярно к первому цилиндрическому линейному электродвигателю, и включающим в себя неподвижный статор 14 и подвижный наборный якорь 15, причем подвижный наборный якорь 15 состоит из магнитных втулок 16 и немагнитных колец 17, в нижней части подвижного наборного якоря 15 прикреплен двигатель постоянного тока 18, приводящий во вращение через вал 19 режущий инструмент 20 для механического удаления сорняков 21.
Беспилотный робот-пропольщик работает следующим образом.
По командам установленной на раме 1 системы управления и навигации 2 при помощи двигателей постоянного тока 7, приводящих в действие колеса 5 через вращающийся вал 8 беспилотный робот-пропольщик перемещается в рядках с растениями. Для повышения маневренности в рядках с растениями каждое колесо 5 оснащено стойкой 6 с поворотным механизмом (на чертеже не показано), позволяющим поворачивать колесо 5 на любой необходимый угол поворота. В процессе перемещения беспилотного робота-пропольщика при помощи системы обнаружения и распознавания растений 4 определяются координаты сорняка 21, который уничтожается при помощи режущего инструмента 20, приводимого во вращение через вал 19 двигателем постоянного тока 18.
Точность наведения режущего инструмента 20 для уничтожения сорняка 21 обеспечивается при помощи системы управления работой цилиндрических линейных электродвигателей 9 и двух цилиндрических линейных электродвигателей (на чертеже не обозначены), осуществляющих перемещение режущего инструмента 20 в горизонтальной и вертикальной плоскостях.
Первый цилиндрический линейный электродвигатель осуществляет перемещение режущего инструмента 20 в горизонтальной плоскости и состоит из подвижного статора 10, который перемещается в горизонтальной плоскости по неподвижному наборному якорю 11, состоящему из магнитных втулок 12 и немагнитных колец 13.
Второй цилиндрический линейный электродвигатель присоединен перпендикулярно к первому цилиндрическому линейному электродвигателю, осуществляет перемещение режущего инструмента 20 в вертикальной плоскости и состоит из вертикального неподвижного статора 14 и перемещаемого в вертикальной плоскости подвижного наборного якоря 15, состоящего из магнитных втулок 16 и немагнитных колец 17.
Электропитание оборудования беспилотного робота-пропольщика осуществляется от аккумуляторных батарей 3.
Новизна технического решения обусловлена тем, что на раме беспилотного робота-пропольщика установлены система управления работой цилиндрических линейных электродвигателей, два цилиндрических линейных электродвигателя, причем первый цилиндрический линейный электродвигатель расположен в раме горизонтально и включает подвижный статор и неподвижный наборный якорь, причем неподвижный наборный якорь состоит из магнитных втулок и немагнитных колец, второй цилиндрический линейный электродвигатель является вертикальным, присоединенным перпендикулярно к первому цилиндрическому линейному электродвигателю, и включающим в себя неподвижный статор и подвижный наборный якорь, причем подвижный наборный якорь состоит из магнитных втулок и немагнитных колец, в нижней части подвижного наборного якоря прикреплен двигатель постоянного тока, приводящий во вращение через вал режущий инструмент для механического удаления сорняков.
По сравнению с прототипом у предлагаемого изобретения следующие преимущества:
- повышается точность уничтожения сорняков в рядках и междурядьях;
- снижается опасность травмирования культурных растений;
- уменьшается потребление электроэнергии в полевых условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Робот-пропольщик | 2019 |
|
RU2703092C1 |
| Робот-пропольщик | 2019 |
|
RU2703775C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| Беспилотный робот для магнитно-импульсной обработки растений | 2016 |
|
RU2630397C2 |
| Беспилотный робот для картирования урожайности | 2016 |
|
RU2633431C2 |
| Мобильное роботизированное шасси для надреза мульчирующей пленки над растением с последующей ее фиксацией | 2022 |
|
RU2785580C1 |
| Беспилотный робот для лазерной обработки растений | 2016 |
|
RU2634104C2 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2033679C1 |
Изобретение относится к сельскому хозяйству. Беспилотный робот-пропольщик содержит раму (1), на которой установлены система управления и навигации (2), аккумуляторные батареи (3), система обнаружения и распознавания растений (4), система управления работой цилиндрических линейных электродвигателей (9), два цилиндрических линейных электродвигателя и четыре колеса (5) для перемещения. Каждое колесо (5) содержит стойку (6) с поворотным механизмом и приводится в действие при помощи отдельного двигателя постоянного тока (7) через вращающийся вал (8). Первый цилиндрический линейный электродвигатель расположен в раме (1) горизонтально и включает подвижный статор (10) и неподвижный наборный якорь (11), состоящий из магнитных втулок (12) и немагнитных колец (13). Второй цилиндрический линейный электродвигатель является вертикальным, присоединенным перпендикулярно к первому цилиндрическому линейному электродвигателю, и включает в себя неподвижный статор (14) и подвижный наборный якорь (15), состоящий из магнитных втулок (16) и немагнитных колец (17). В нижней части подвижного наборного якоря (15) прикреплен двигатель постоянного тока (18), приводящий во вращение через вал (19) режущий инструмент (20) для механического удаления сорняков (21). Обеспечивается повышение качества прополки рядков и междурядий пропашных культур от сорных растений, уменьшение травмирования культурных растений и снижение энергетических затрат. 1 ил.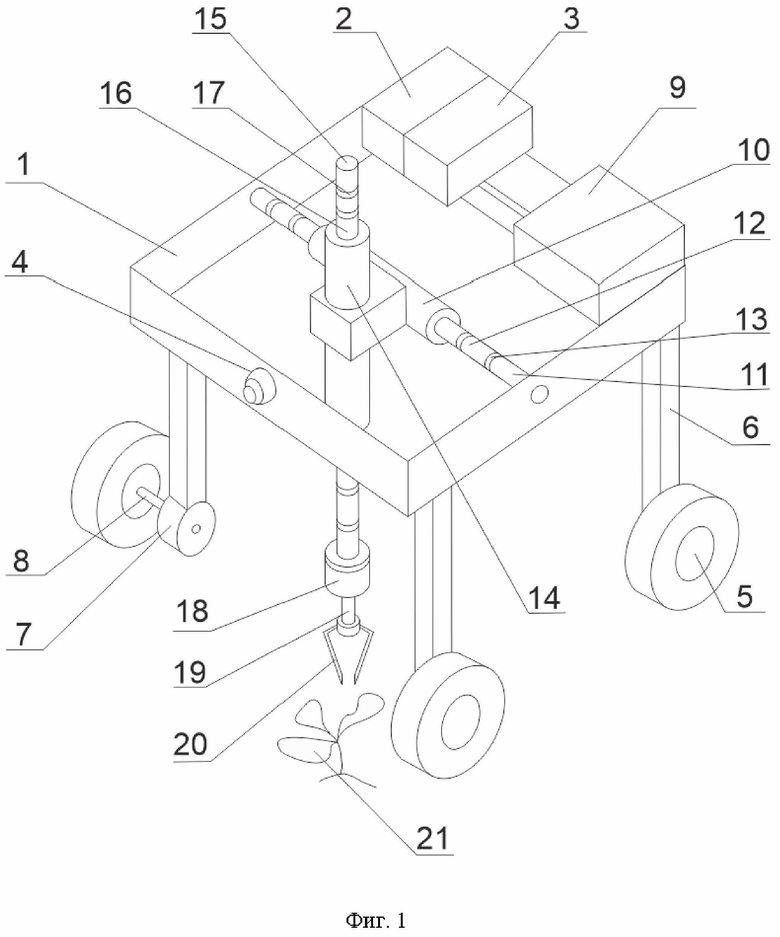
Беспилотный робот-пропольщик, содержащий раму, на которой установлены система управления и навигации, аккумуляторные батареи, система обнаружения и распознавания растений, четыре колеса для перемещения, отличающийся тем, что каждое колесо содержит стойку с поворотным механизмом и приводится в действие при помощи отдельного двигателя постоянного тока через вращающийся вал, системой управления работой цилиндрических линейных электродвигателей, двумя цилиндрическими линейными электродвигателями, причем первый цилиндрический линейный электродвигатель расположен в раме горизонтально и включает подвижный статор и неподвижный наборный якорь, причем неподвижный наборный якорь состоит из магнитных втулок и немагнитных колец, второй цилиндрический линейный электродвигатель является вертикальным, присоединенным перпендикулярно к первому цилиндрическому линейному электродвигателю, и включающим в себя неподвижный статор и подвижный наборный якорь, причем подвижный наборный якорь состоит из магнитных втулок и немагнитных колец, в нижней части подвижного наборного якоря прикреплен двигатель постоянного тока, приводящий во вращение через вал режущий инструмент для механического удаления сорняков.
| CN 208300228 U, 01.01.2019 | |||
| CN 207322127 U, 08.05.2018 | |||
| CN 211672116 U, 16.10.2020 | |||
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| WO 2019133575 A1, 04.07.2019. | |||

