Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений.
Известно устройство, для лазерной обработки семян и растений (Патент на изобретение РФ №2202869, http://www.agrobook.ru/blog/user/admin/lazernaya-obrabotka-v-sh-zabytoe-novoe), навешенное на трактор для обработки посевов в поле, у которого имеется лазерный генератор, размещенный в корпусе, сканирующее устройство, содержащее зеркало, приводимое в движение от электропривода.
Недостатком известного устройства является то, что оно не работает автоматизированно, без участия человека, не имеет возможности выбора режимов работы, в зависимости от культуры, возможности автоматической адаптации к высоте растений.
Наиболее близким по технической сущности к заявленному беспилотному роботу является робототехническое средство Hortibot (http://www.technologyreview.com/news/408225/robotic-farmer/), состоящее из рамы, управляемых колес, системы управления и навигации с контрольно-измерительными приборами, системы питания, которое обеспечивает выполнение широкого спектра работ в интенсивных технологиях возделывания садов. Оснащается оно различными технологическими модулями: опрыскиватель-гербицидник, рыхлитель пропольщик, косилка.
Недостатком известного робототехнического устройства является то, что оно не оснащено модулем для лазерной обработки растений, необходимым оборудованием для настройки режимов работы лазера, не имеет возможности адаптироваться под различные растения.
Технической задачей предлагаемого изобретения является повышение качества и эффективности процесса обработки растений.
Поставленная техническая задача достигается тем, что беспилотный робот для лазерной обработки растений, включающий раму, управляемые колеса, систему управления и навигации с контрольно измерительными приборами и систему питания, согласно изобретению снабжен установленными на раме адаптером и модулем лазерной обработки растений.
Повышение качества и эффективности процесса лазерной обработки растений достигается путем использования технологического адаптера, который в автоматическом режиме управляет работой модуля лазерной обработки растений.
Изобретение поясняется чертежами.
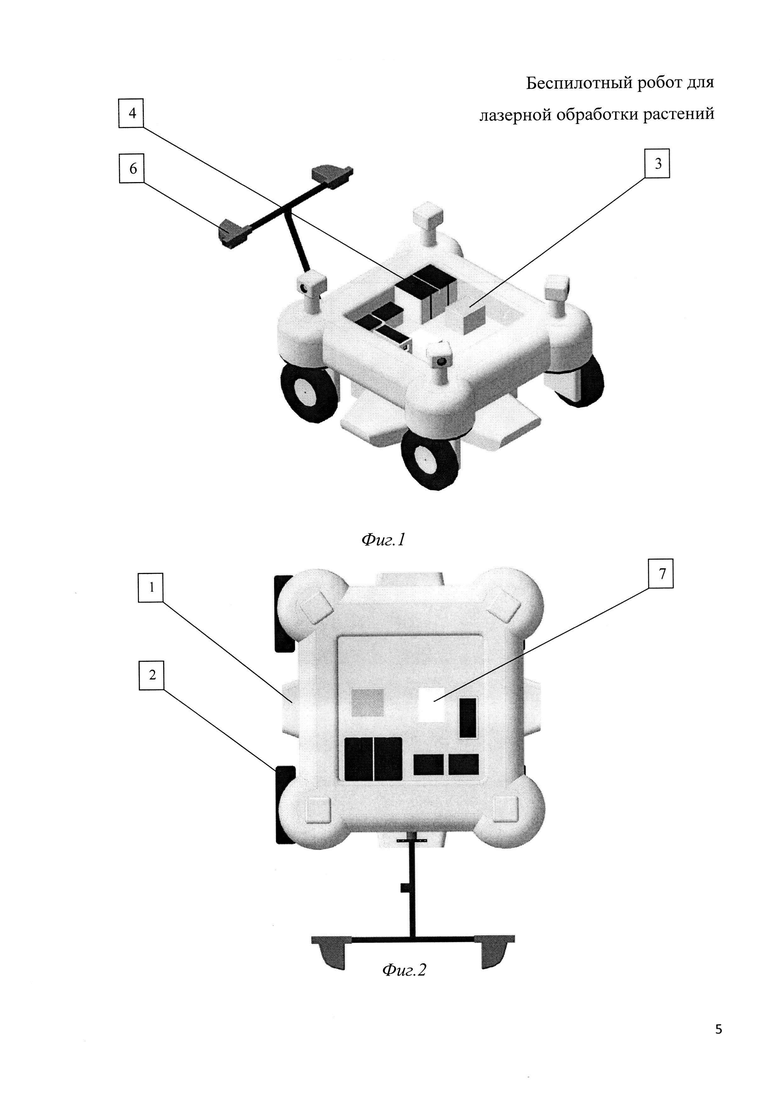
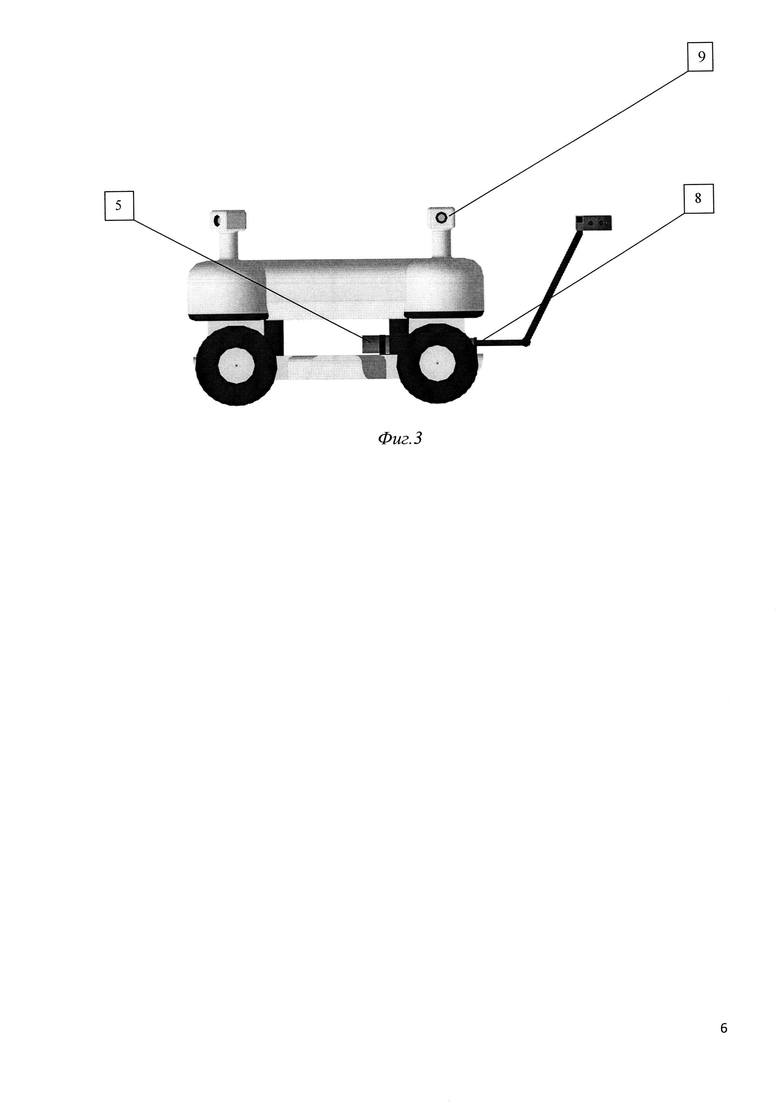
На фиг. 1 схематично представлен беспилотный робот для МИО растений, на фиг. 1 - диметрия; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку.
Беспилотный робот с модулем лазерной обработки растений, например ягодников, плодовых насаждений состоит из рамы 1, колес 2, системы управления и навигации 3 с контрольно-измерительными приборами, системы питания 4, технологического адаптера 5 с модулем 6 лазерной обработки растений и бортового компьютера 7.
Технологический адаптер с модулем лазерной обработки растений имеет возможность автоматически адаптироваться под растения, путем поднятия и опускания электрического цилиндра 8 (актуатор) адаптера. Корректировка высоты расположения модуля 6 лазерной обработки растений проходит за счет изменения клиренса беспилотного робота. Лазерный модуль позволяет кратковременно (от долей секунд до десятков минут) обрабатывать растения когерентным излучением, что стимулирует как вегетативные, так и репродуктивные функции растения.
Устройство работает следующим образом.
Робот заезжает в рядки растений, в автоматическом режиме с помощью системы 9 технического зрения и технологического адаптера 5 с электрическим цилиндром 8 подстраивает высоту и угол модуля лазерной обработки под высоту растений. Продолжая движение, робот с модулем 6 лазерной обработки растений обрабатывает растения.
Если в рядке имеются пропуски растений, то по сигналам от системы 9 технического зрения обработка лазерным облучением прекращается и возобновляется только там, где есть растения.
Оператор имеет возможность наблюдать за процессом обработки посредством видеокамер и при необходимости подкорректировать работу беспилотного робота при помощи пульта дистанционного управления. Для удаленного выбора режима работы технологического адаптера 5 с модулем 6 лазерной обработки растений на раме 1 расположен бортовой компьютер (не показан).
Применение беспилотного робота с модулем лазерной обработки растений позволяет повысить функциональную активность растений, урожайность, автоматизировать процесс обработки растений, эффективность процесса обработки растений, сократить количество обработок и снизить трудовые затраты на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный робот для магнитно-импульсной обработки растений | 2016 |
|
RU2630397C2 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| Беспилотный робот для картирования урожайности | 2016 |
|
RU2633431C2 |
| Робот-пропольщик | 2019 |
|
RU2703092C1 |
| Робот-пропольщик | 2019 |
|
RU2703775C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Беспилотный робот-пропольщик | 2021 |
|
RU2766888C1 |
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений. Беспилотный робот для лазерной обработки растений содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и установленный на раме модуль лазерной обработки растений с технологическим адаптером для установки высоты расположения упомянутого модуля в соответствии с высотой обрабатываемых растений. Изобретение направлено на повышение качества и эффективности процесса лазерной обработки растений. 3 ил.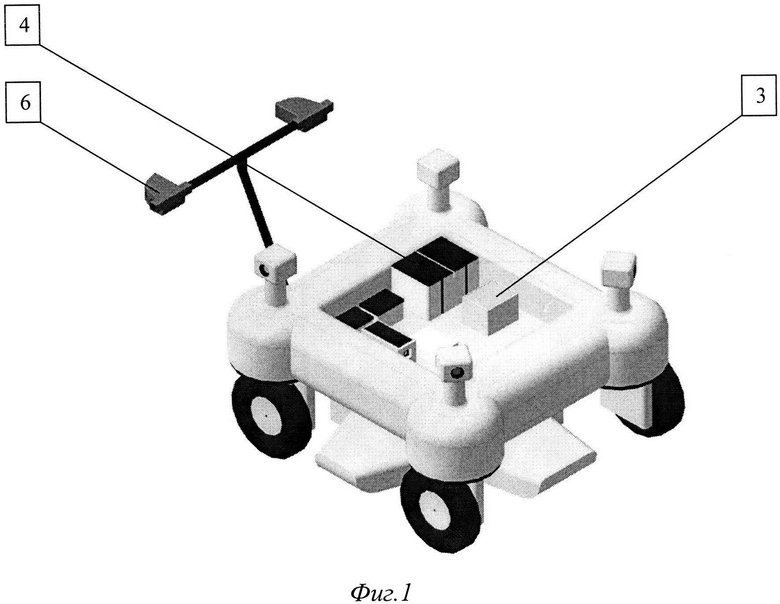
Беспилотный робот для лазерной обработки растений, характеризующийся тем, что он содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и установленный на раме модуль лазерной обработки растений с технологическим адаптером для установки высоты расположения упомянутого модуля в соответствии с высотой обрабатываемых растений.
| 0 |
|
SU156677A1 | |
| Способ пластификации синтетических полимеров и эфиров целлюлозы | 1948 |
|
SU75530A1 |
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОЙ ОБРАБОТКИ СЕМЯН И РАСТЕНИЙ | 2001 |
|
RU2202869C2 |
| Державка для клинков бритв типа "Жиллет" | 1929 |
|
SU20987A1 |
| US 6199639 B1, 13.03.2001. | |||

