Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам, для мониторинга и составления электронных карт урожайности.
Известен беспилотный робот Hortibot, (http://www.technologyreview.com/news/408225/robotic-farmer/), состоящий из рамы, управляемых колес, системы управления и навигации с контрольно измерительными приборами, системы питания, который обеспечивает выполнение широкого спектра работ. Он оснащается различными технологическими модулями: опрыскиватель-гербицидник, рыхлитель пропольщик, косилка.
Недостатком известного робототехнического устройства является то, что оно предназначено только для обработки растений, не имеет возможности картирования урожайности.
Наиболее близким по технической сущности к заявленному беспилотному роботу является робототехническое средство BoniRob Amazone-Werke (http://go.amazone.de/?lang=l&news=26), включающее раму, управляемые колеса, систему управления и навигации с контрольно измерительными приборами и систему питания, систему технического зрения. Система технического зрения способна различать сорняки от полезных культур по форме листьев, которые затем удаляются механическим способом.
Недостатком известного устройства является то, что оно не оснащено оборудованием для картирования урожайности.
Технической задачей предлагаемого изобретения является повышение производительности труда, сокращение расходов, повышение урожайности.
Поставленная техническая задача достигается тем, что беспилотный робот для картирования урожайности, включающий раму, управляемые колеса, систему управления и навигации с контрольно измерительными приборами, систему питания, бортовой компьютер, систему технического зрения, согласно изобретению, снабжен установленными на раме адаптером и модулем для картирования урожайности с системой мультиспектральных, стереоскопических и тепловизионных камер, установленных на нем.
Повышение урожайности, повышение производительности труда и сокращение расходов достигается путем использования системы мультиспектральных, стереоскопических и тепловизионных камер, установленных на модуле для картирования урожайности, которые в автоматическом режиме, во время движения получают данные о состоянии растений, степени зрелости урожая, наличии болезней и передают их для составления электронных карт.
Изобретение поясняется чертежами.
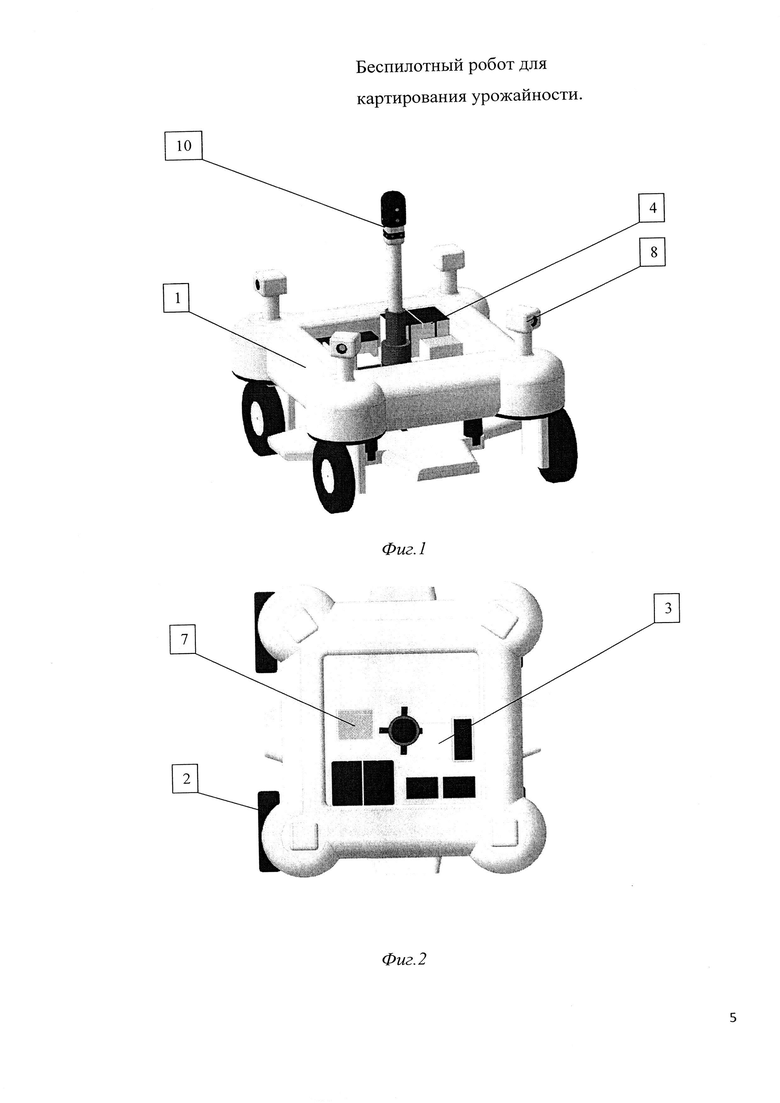
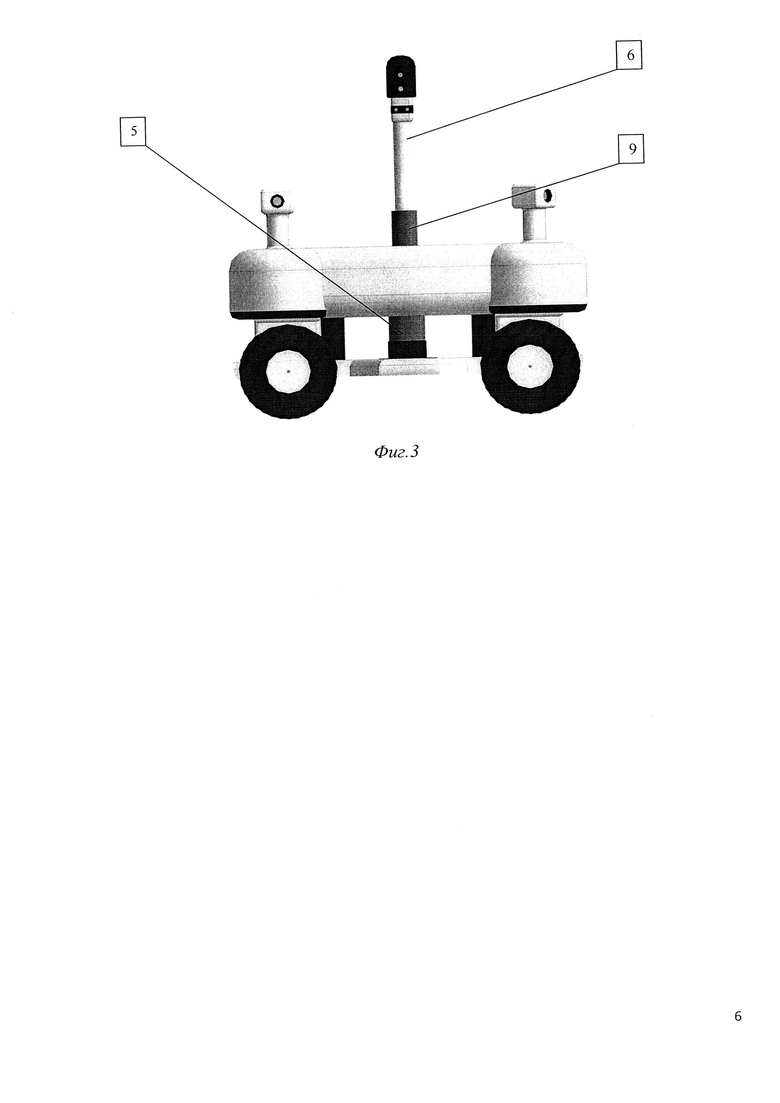
На фиг. 1 схематично представлен беспилотный робот для картирования урожайности, диметрия; на фиг. 2 - то же, вид сверху; а на фиг. 3 - то же, вид сбоку.
Беспилотный робот с модулем для картирования урожайности состоит из рамы 1, колес 2, системы управления и навигации 3 с контрольно измерительными приборами, системы питания 4, технологического адаптера 5 с модулем 6 для картирования урожайности, бортового компьютера 7.
Технологический адаптер 5 с модулем 6 для картирования урожайности имеет возможность автоматически адаптироваться под высоту растения, с помощью системы технического зрения 8 и электрического цилиндра 9 (актуатор) адаптера. Корректировка высоты расположения модуля 6 проходит путем автоматического выдвижения электрического цилиндра 9 адаптера. Модуль для картирования урожайности включает в себя систему мультиспектральных, стереоскопических и тепловизионных камер 10, которые создают карту состояния растений, степени зрелости и объема урожая.
Устройство работает следующим образом.
Беспилотный робот заезжает в рядки растений, в автоматическом режиме, с помощью системы технического зрения 8 и технологического адаптера 5 подстраивает высоту модуля 6 для картирования урожайности под высоту растительности. Модуль картирования урожайности делает снимки урожая мультиспектральными, стереоскопическими и тепловизионными камерами. Каждый снимок обладает набором цифровых параметров - географическими координатами, высотой съемки, углом экспонирования и телеметрическими данными, которые загружаются в ГИС-систему. Приемник сигналов GPS со спутниковой группировки в реальном времени привязывает цифровые параметры, показания модуля картирования к электронной карте. В результате получается цифровая карта урожайности, которая включает данные со всего участка, а обобщенные фотографии создают набор карт состояния растений, степени зрелости и объема урожая ягодников и плодовых насаждений.
Оператор имеет возможность наблюдать за процессом картирования и при необходимости подкорректировать работу беспилотного робота при помощи пульта дистанционного управления. Для удаленного выбора маршрута, режима работы технологического адаптера 5 с модулем 6 для картирования на раме 1 расположен бортовой компьютер 7.
Применение заявленного беспилотного робота обеспечит повышение производительности труда, сокращение расходов, повышение урожайности (за счет своевременного реагирования на падение урожайности на нужном участке садов, плодовых насаждений, выявления заболеваний растений, погибших культур и определение дозы удобрений и средств защиты растений для дифференциального внесения на будущий сезон), позволит сэкономить трудовые затраты на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный робот для магнитно-импульсной обработки растений | 2016 |
|
RU2630397C2 |
| Беспилотный робот для лазерной обработки растений | 2016 |
|
RU2634104C2 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Автономный полевой робот дифференцированного внесения агрохимических средств методом опрыскивания | 2022 |
|
RU2785071C1 |
| Беспилотный робот-пропольщик | 2021 |
|
RU2766888C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений. Беспилотный робот с модулем для картирования урожайности содержит раму, колеса, систему управления и навигации с контрольно измерительными приборами, систему питания, технологический адаптер с модулем для картирования урожайности и бортовой компьютер. При этом он снабжен установленными на раме адаптером и модулем для картирования урожайности. Изобретение направлено на повышение производительности труда, сокращение расходов и повышение урожайности. 3 ил.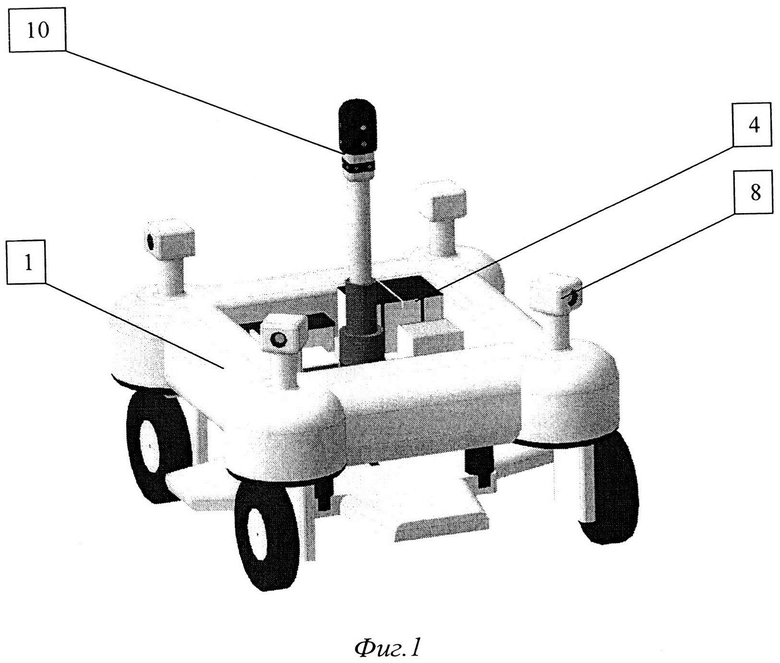
Беспилотный робот для картирования урожайности растений, характеризующийся тем, что он содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, бортовой компьютер, системы питания и технического зрения и установленный на раме модуль для картирования урожайности с системой мультиспектральных, стереоскопических и тепловизионных камер и с технологическим адаптером для корректировки высоты расположения модуля в зависимости от высоты растений с помощью упомянутой системы технического зрения.
| АГРОПРОМЫШЛЕННЫЙ АГРЕГАТ | 2005 |
|
RU2289900C1 |
| RU 201047394 A, 27.05.2012 | |||
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УСТРОЙСТВ ДЛЯ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ И СПОСОБ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ | 2011 |
|
RU2477037C2 |
| WO 2007015447 A1, 08.02.2007. | |||

