Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений.
Известен опрыскиватель навесной с гербицидной штангой ЗУБР НШ Г/ДС-2 (http://www.selagro.com/technics/id106), у которого имеется бак и боковые штанги с распылителями.
Недостатком известного устройства является то, что оно прицепное, поэтому не исключается вредное воздействие химикатов на оператора - водителя, а также данное устройство не имеет возможности дифференцированной обработки сорной растительности гербицидами, что влечет за собой перерасход рабочей жидкости и излишнее загрязнение окружающей среды.
Наиболее близким по технической сущности к заявленному беспилотному роботу является робототехническое средство Hortibot (http://www.technologyreview.com/news/408225/robotic-farmer/), состоящее из рамы, управляемых колес, системы управления и навигации с контрольно-измерительными приборами, системы питания, которое обеспечивает выполнение широкого спектра работ. Оснащается оно различными технологическими модулями: опрыскиватель-гербицидник, рыхлитель пропольщик, косилка.
Недостатком известного робототехнического устройства является то, что оно предназначено только для пропашных культур, не имеет возможности внесения гербицидов в приствольные зоны, например, в плодовых питомниках, садах.
Технической задачей предлагаемого изобретения является повышение качества, универсальности применения для различных культур, снижение вредного воздействия на окружающую среду, безопасности и эффективности процесса внесения гербицидов.
Поставленная техническая задача достигается тем, что беспилотный робот для внесения гербицидов, включающий раму, управляемые колеса, систему управления и навигации с контрольно-измерительными приборами и систему питания, согласно изобретению он снабжен жестко закрепленным на раме центральным модулем для дифференцированного внесения гербицидов и адаптером с выдвижным боковым модулем.
Повышение качества, безопасности и эффективности процесса внесения гербицидов достигается путем исключения непосредственного участия оператора в технологическом процессе и использования технологического адаптера, который с помощью системы технического зрения в автоматическом режиме управляет работой модулей для внесения гербицидов, при этом модули работают дифференцированно, обеспечивая снижение вредного воздействия на окружающую среду.
Изобретение поясняется чертежами.
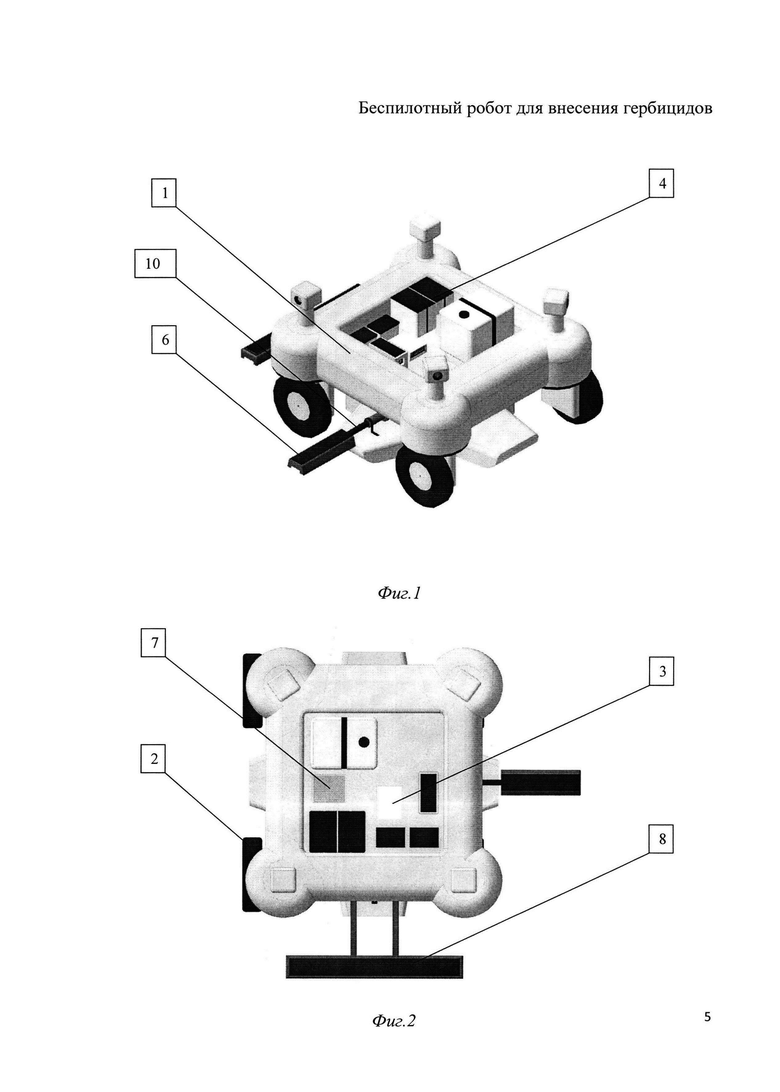
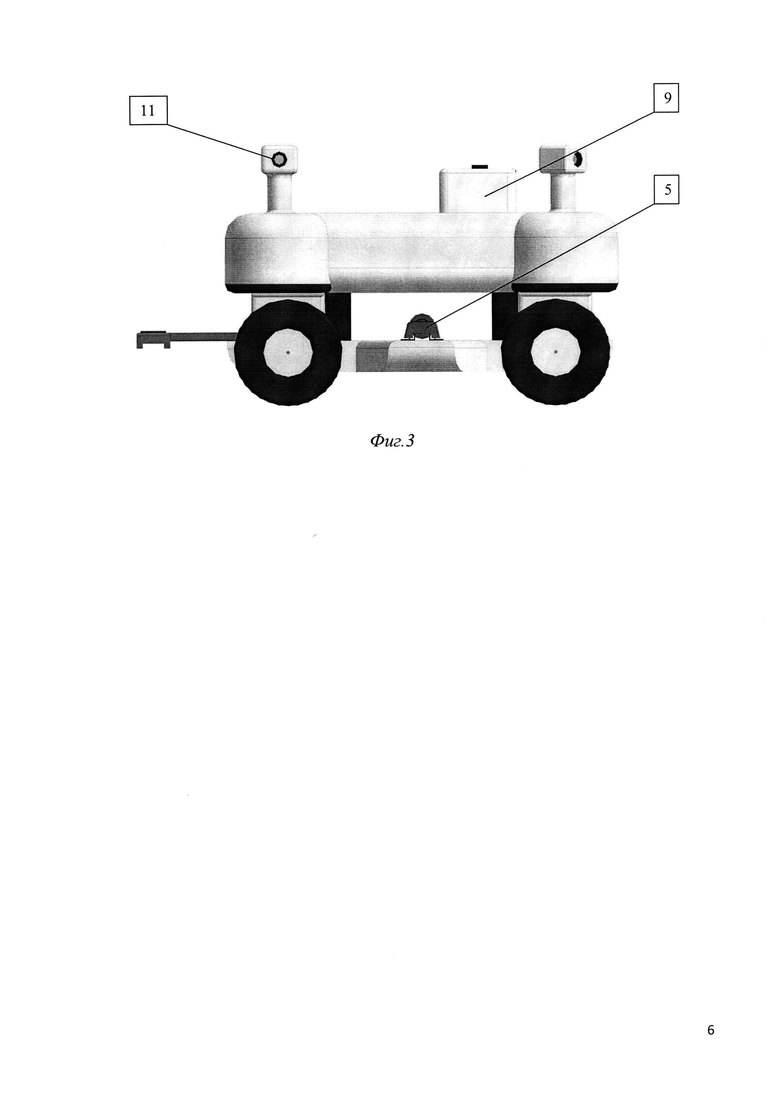
На фиг. 1 схематично представлен беспилотный робот для внесения гирбицидов, диметрия; на фиг. 2 - то же, вид сверху; а на фиг. 3 - то же, вид сбоку.
Беспилотный робот с модулем для внесения гербицидов состоит из рамы 1, колес 2, системы управления и навигации 3 с контрольно измерительными приборами, системы питания 4, технологического адаптера 5 с боковым 6 и центральным 7 модулями для дифференцированного внесения гербицидов, бортового компьютера 8, емкость для рабочего раствора 9.
Боковой модуль 6 для внесения гербицидов установлен с возможностью автоматически адаптироваться под растения, с помощью системы технического зрения 11 и электрического цилиндра 10 (актуатор) адаптера 5. Модуль 6 может выдвигаться и втягиваться автоматически при обработке межствольных зон и изменять высоту его расположения за счет изменения клиренса беспилотного робота.
Центральный модуль 7 жестко закреплен на раме 1 беспилотного робота и служит для обработки междурядий.
Устройство работает следующим образом.
Беспилотный робот заезжает в рядки растений, в автоматическом режиме, с помощью системы технического зрения 11, путем изменения клиренса, подстраивает высоту центрального модуля 7 для внесения гербицидов под высоту сорной растительности. Для обработки приствольных зон гербицидами, беспилотный робот использует технологический адаптер 5 с боковым модулем 6. С помощью технологического адаптера 5, боковой модуль 6 для внесения гербицидов имеет возможность обрабатывать межствольные зоны садовых насаждений, не повреждая деревьев. Обработка сорной растительности гербицидами вокруг ствола дерева проходит путем автоматического выдвижения электрического цилиндра 10. После обработки межствольной зоны гербицидами, робот продолжает движение, а гербицидная штанга автоматически втягивается в корпус робота, огибая ствол дерева.
Если в рядке имеются участки без сорной растительности, то по сигналам от системы технического зрения 11 подача гербицидов автоматически прекращается и возобновляется только там, где есть сорные растения.
Оператор имеет возможность наблюдать за процессом обработки посредством видеокамер и при необходимости подкорректировать работу беспилотного робота при помощи пульта дистанционного управления. Для удаленного выбора режима работы технологического адаптера 5 с модулями 6 и 7 для обработки гербицидами на раме 1 расположен бортовой компьютер 8.
После того как в баке устройства израсходуется весь раствор, беспилотный робот для внесения гербицидов направляется для дозаправки. После дозаправки рабочий процесс продолжается.
Применение заявленного опрыскивателя обеспечит повышенную безопасность процесса химической обработки растений, позволит повысить качество обработки растений, автоматизировать процесс обработки растений, сократить количество обработок, сэкономить трудовые затраты на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Автономный полевой робот дифференцированного внесения агрохимических средств методом опрыскивания | 2022 |
|
RU2785071C1 |
| Беспилотный робот для магнитно-импульсной обработки растений | 2016 |
|
RU2630397C2 |
| Беспилотный робот для картирования урожайности | 2016 |
|
RU2633431C2 |
| Беспилотный робот для лазерной обработки растений | 2016 |
|
RU2634104C2 |
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к техническим средствам для обработки растений. Беспилотный робот для внесения гербицидов содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания, а также центральный и боковой модули для дифференцированного внесения гербицидов. Центральный модуль жестко закреплен на раме с возможностью корректировки высоты его расположения изменением клиренса робота в соответствии с высотой сорной растительности. Боковой модуль установлен с возможностью выдвижения посредством технологического адаптера. Изобретение направлено на повышение качества обработки растений, универсальности применения и снижении вредного воздействия на окружающую среду. 3 ил. 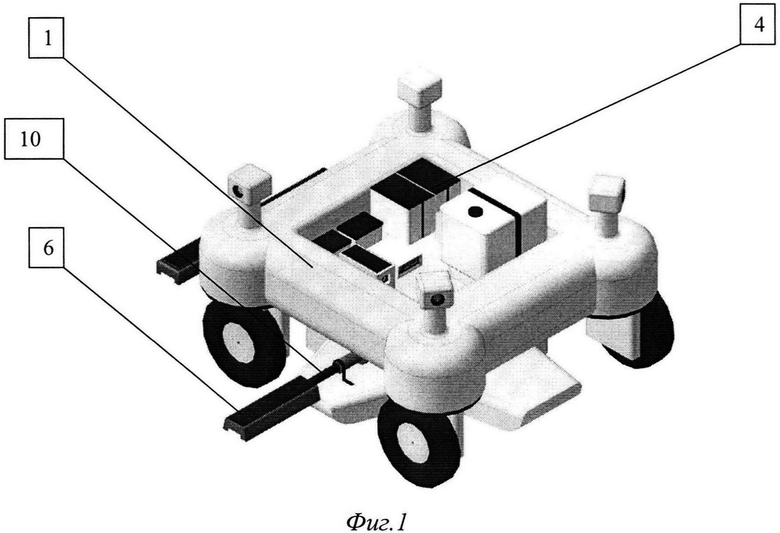
Беспилотный робот для дифференцированного внесения гербицидов при обработке растений, характеризующийся тем, что он содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и центральный и боковой модули для дифференцированного внесения гербицидов, при этом центральный модуль жестко закреплен на раме с возможностью корректировки высоты его расположения изменением клиренса беспилотного робота в соответствии с высотой сорной растительности, а боковой модуль установлен с возможностью выдвижения посредством технологического адаптера.
| 0 |
|
SU156677A1 | |
| Комбинированная машина для выравнивания поверхности и внесения гербицидов одновременно с обработкой почвы | 1985 |
|
SU1431699A1 |
| RU 2007121251 A, 20.12.2008 | |||
| АГРЕГАТ ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ И ГЕРБИЦИДОВ В ПРИКОРНЕВУЮ ЗОНУ ПОСЕВОВ КУКУРУЗЫ И ПРОПАШНЫХ КУЛЬТУР | 2004 |
|
RU2274991C1 |
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2001 |
|
RU2218763C2 |
| DE 3738518 A1, 24.05.1989. | |||

