Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений.
Известен высококлиренсный трактор с модулем магнитно-импульсной обработки (МИО) растений (патент на изобретение №2362296), у которого имеется автосцепка с гидроподъемником и плоский индуктор.
Недостатком известного устройства является то, что оно предназначено для обработки только низкорастущих растений и не работает автоматизированно, без участия человека, не имеет возможности выбора режимов работы в зависимости от культуры, возможности автоматической адаптации к высоте растений.
Наиболее близким по технической сущности к заявленному беспилотному роботу является робототехническое средство Hortibot (http://www.technologyreview.com/news/408225/robotic-farmer/), состоящее из рамы, управляемых колес, системы управления и навигации с контрольно-измерительными приборами, системы питания, которое обеспечивает выполнение широкого спектра работ в интенсивных технологиях возделывания садов. Оснащается оно различными технологическими модулями: опрыскиватель-гербицидник, рыхлитель-пропольщик, косилка.
Недостатком известного робототехнического устройства является то, что оно не имеет возможности работать с модулем МИО растений.
Технической задачей предлагаемого изобретения является повышение качества и эффективности процесса МИО растений.
Поставленная техническая задача достигается тем, что беспилотный робот для магнитно-импульсной обработки растений, включающий раму, управляемые колеса, систему управления и навигации с контрольно-измерительными приборами и систему питания, согласно изобретению снабжен установленными на раме адаптером и модулем магнитно-импульсной обработки растений, выполненным в виде магнитно-импульсного активатора с индуктором.
Повышение качества и эффективности процесса МИО достигается путем использования технологического адаптера, который в автоматическом режиме управляет работой модуля МИО.
Изобретение поясняется чертежами.
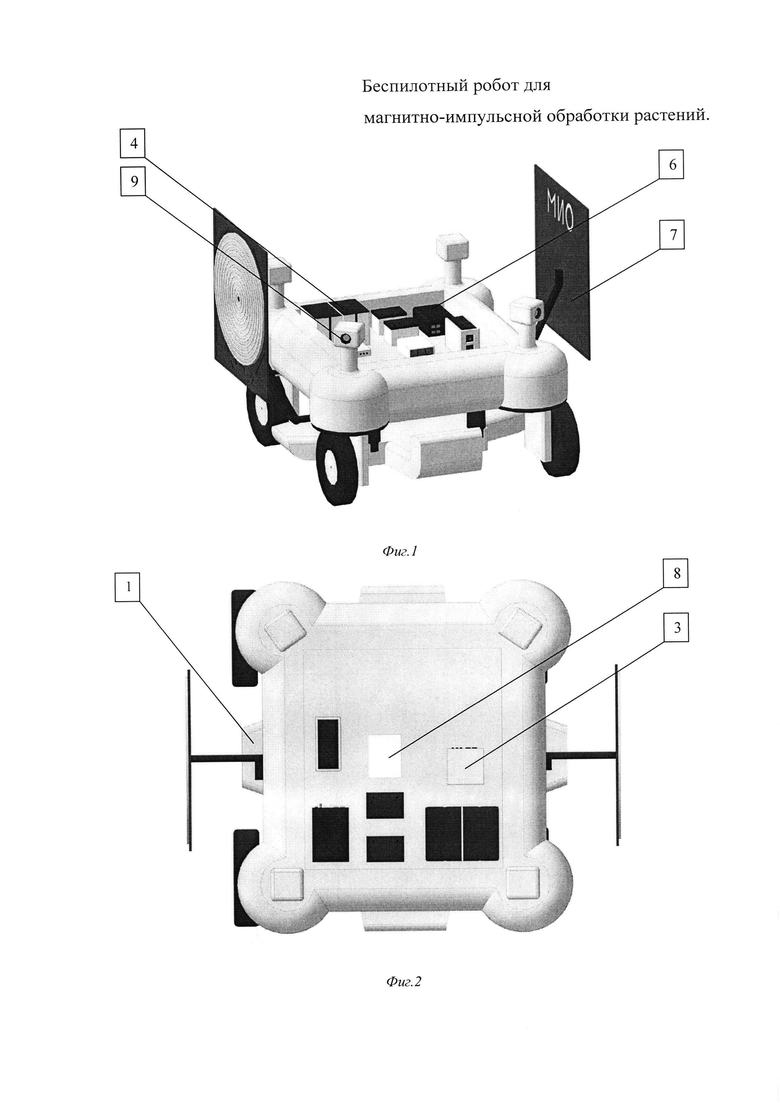
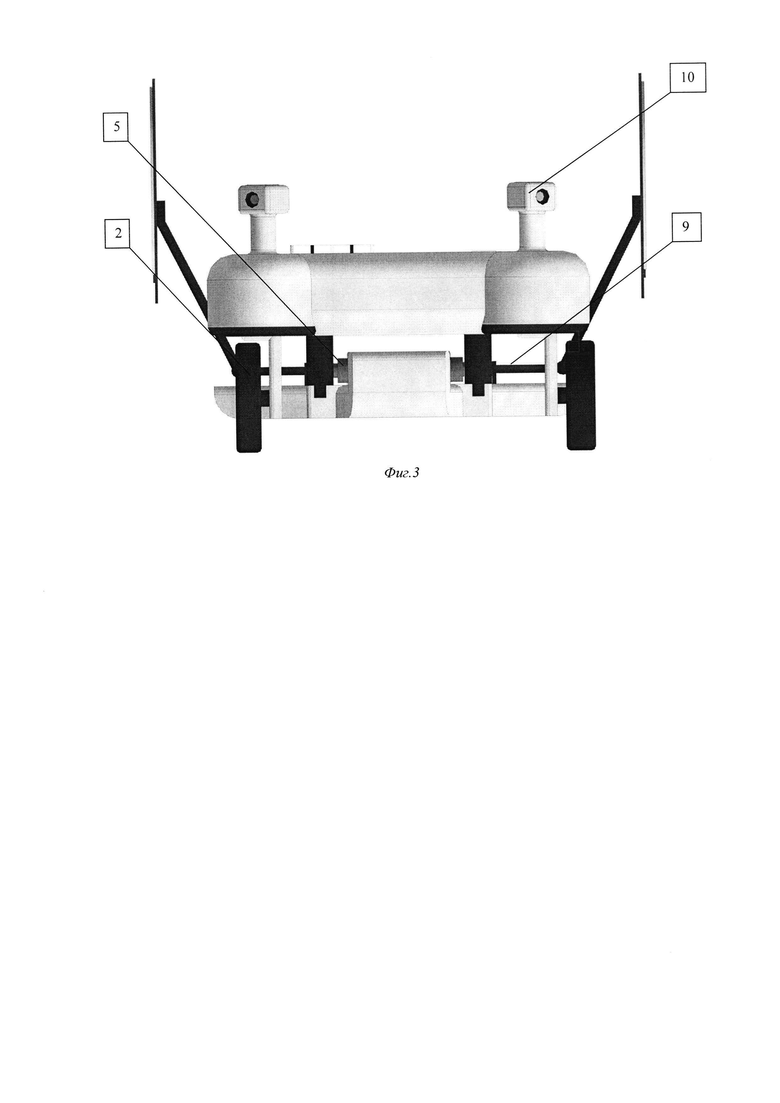
На чертежах схематично представлен беспилотный робот для МИО растений, на фиг. 1 - диметрия; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид спереди;
Беспилотный робот с модулем магнитно-импульсной обработки (МИО) растений, например ягодников, плодовых насаждений, состоит из рамы 1, колес 2, системы управления и навигации 3 с контрольно-измерительными приборами, системы питания 4, технологического адаптера 5 с модулем МИО. Модуль МИО содержит магнитно-импульсный активатор 6 и индукторы 7. Беспилотный робот имеет бортовой компьютер 8.
Технологический адаптер с модулем МИО имеет возможность автоматически адаптироваться под растения путем поднятия и опускания электрического цилиндра 9 (актуатор) адаптера. Корректировка высоты расположения МИО происходит за счет изменения клиренса беспилотного робота.
Устройство работает следующим образом.
Робот заезжает в рядки растений, в автоматическом режиме с помощью системы технического зрения 10 и технологического адаптера 5 с электрическим цилиндром 9 подстраивает высоту и угол модуля МИО под высоту растений. Продолжая движение, робот с модулем МИО обрабатывает растения магнитными импульсами.
Если в рядке имеются пропуски растений, то по сигналам от системы технического зрения 10 обработка магнитными импульсами прекращается и возобновляется только там, где есть растения.
Оператор имеет возможность наблюдать за процессом обработки посредством видеокамер и при необходимости подкорректировать работу беспилотного робота при помощи пульта дистанционного управления. Для удаленного выбора режима работы технологического адаптера 5 с МИО на раме 1 расположен бортовой компьютер 8.
Применение беспилотного робота с модулем магнитно-импульсной обработки позволяет повысить качество (ускорение роста и развития растений, повышение урожайности) и автоматизировать процесс обработки растений магнитными импульсами, сократить количество обработок, сэкономить трудовые затраты на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| Беспилотный робот для лазерной обработки растений | 2016 |
|
RU2634104C2 |
| Беспилотный робот для картирования урожайности | 2016 |
|
RU2633431C2 |
| Робот-пропольщик | 2019 |
|
RU2703092C1 |
| Робот-пропольщик | 2019 |
|
RU2703775C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Беспилотный робот-пропольщик | 2021 |
|
RU2766888C1 |
| Технологический адаптер с модулем магнитно-импульсной обработки растений | 2016 |
|
RU2637726C1 |
| Автоматизированный агрегат магнитно-импульсной обработки садовых растений | 2018 |
|
RU2679722C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для обработки растений. Беспилотный робот для магнитно-импульсной обработки растений содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и установленный на раме модуль магнитно-импульсной обработки растений с технологическим адаптером для установки высоты расположения упомянутого модуля в соответствии с высотой обрабатываемых растений, при этом модуль выполнен в виде магнитно-импульсного активатора с индуктором. Изобретение направлено на повышение качества и эффективности процесса магнитно-импульсной обработки растений. 3 ил.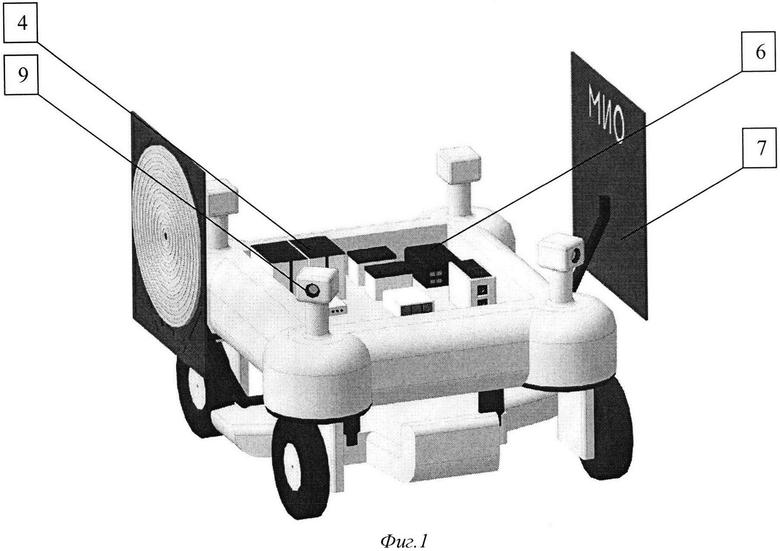
Беспилотный робот для магнитно-импульсной обработки растений, включающий раму, управляемые колеса, систему управления и навигации с контрольно-измерительными приборами и систему питания, отличающийся тем, что он снабжен установленными на раме адаптером и модулем магнитно-импульсной обработки растений, выполненным в виде магнитно-импульсного активатора с индуктором.
| 0 |
|
SU156677A1 | |
| АКТИВАТОР ДЛЯ ОБРАБОТКИ РАСТЕНИЙ | 2006 |
|
RU2317699C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА БИОЛОГИЧЕСКИЕ ОБЪЕКТЫ МАГНИТНЫМ ПОЛЕМ | 1991 |
|
RU2038742C1 |
| СПОСОБ КРИОКОНСЕРВАЦИИ ПРОМЕЖУТОЧНОГО ПРОДУКТА ФАКТОРА VIII СВЕРТЫВАНИЯ КРОВИ | 2019 |
|
RU2814332C1 |
| Устройство для электростатической зарядки фотополупроводниковых бумаг | 1960 |
|
SU135090A1 |

