Изобретение относится к сельскохозяйственному машиностроению, в частности к орудиям для междурядной обработки почвы.
Известен пропашной культиватор Гамма MULTICROP производителя «Monosem», содержащий автопозиционную систему, состоящую из двух стабилизирующих плоских дисков которые находятся в постоянном контакте с почвой и позволяют культиватору постоянно центрироваться на трактор [1].
Известна также автоматическая система подруливания «Steer assist» производителя «Thomas Hatzenbihler Agro-Technik» GmbH, состоящий из электронного блока управления, видеокамеры, неподвижной рамы, подвижной рамы, датчика оборота колес, датчика навески, датчика положения рамы и гидромеханический модуль включающий гидроцилиндры смещения рамы [2].
Следующим техническим решением является автопилот для полностью автоматического управления пропашными культиваторами FP161 ООО «НТА», состоящий из электронного блока управления, видеокамеры, неподвижной рамы, подвижной рамы, и гидромеханический модуль, включающий гидроцилиндр смещения рамы [3].
Недостатками вышеуказанных систем автопозиционирования является высокая сложность синхронизации скольжения подвижной рамы относительно неподвижного корпуса.
Прототипом является автоматическая система управления «ROWGUARD» производителя «Einboeck GmbH & CoKG», состоящий из электронного блока управления, видеокамеры, неподвижной рамы, подвижной рамы, датчика оборота колес, датчика навески, датчика положения рамы и гидромеханический модуль включающий гидроцилиндры смещения рамы [4].
Недостатками прототипа является ограниченные функциональные возможности, отсутствие плавности хода подвижной рамы относительно не подвижной, погрешности в позиционировании в виду ступенчатой подачи рабочей жидкости в гидроцилиндры.
Задачей изобретения является устранение указанных недостатков.
Технический результат - повышение качества междурядной обработки почвы за счет постоянной высокой точности движения культиватора вне зависимости от физического состояния и накопленной усталости оператора.
Указанный технический результат достигается тем, что в известной оптико-гидромеханической системе автопозиционирования культиватора, состоящей из электронного блока управления к которому подключены видеокамера, датчик оборота колес, датчик навески, датчик положения подвижной плиты и гидромеханический модуль, включающий неподвижный корпус с направляющими и соединенный с ним посредством скользящей опоры, подвижную плиту с крепежными отверстиями, неподвижный корпус оснащен гидромотором с шестерней, а подвижная плита в верхней части имеет форму зубчатой рейки и соединена с гидромотором посредством зубчато-реечной передачи, обеспечивающей перемещение подвижной плиты относительно неподвижного корпуса в поперечном направлении.
Оптико-гидромеханическая система автопозиционирования культиватора поясняется схемами:
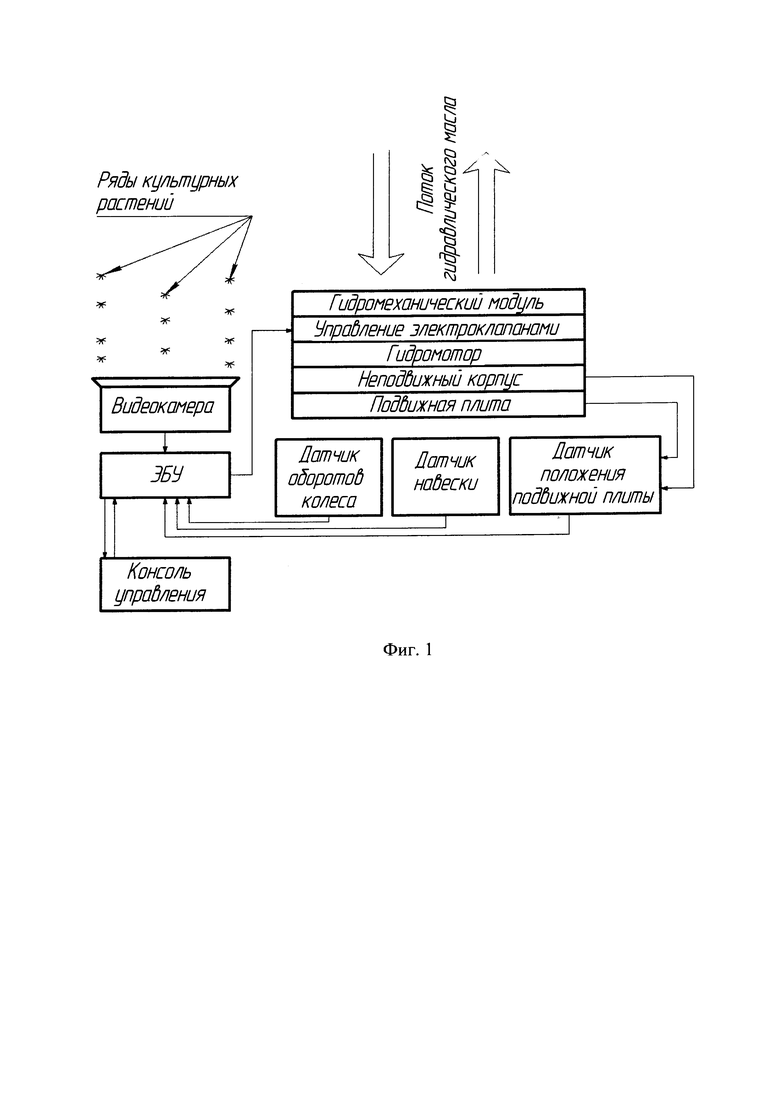
фиг. 1 - принципиальная схема оптико-гидромеханической системы автопозиционирования культиватора;
фиг. 2 - схема гидромеханического модуля, общий вид. Оптико-гидромеханическая система автопозиционирования культиватора (фиг. 1) состоит из механической, гидравлической, электрической части и центра принятия решений.
Механическая часть (фиг. 2) состоит из неподвижного корпуса 1, который крепится на энергетическое средство (трактор) посредством трехточечной навески и подвижной плиты 4, которая соединена с неподвижным корпусом при помощи направляющих 6 и скользящего кронштейна 7. На подвижной плите 4 имеются крепежные отверстия 5, куда при помощи крепежных элементов крепится почвообрабатывающий агрегат. Подвижная плита 4 имеет возможность перемещаться относительно неподвижного корпуса 1 влево и вправо (общий ход 0,5 м) при помощи зубчатой рейки 8 и зубчатого колеса 3 гидромотора 2.
Гидравлическая часть состоит из гидромотора 2, управляющего блока и гидравлических шлангов подающего и сбрасывающего. Управляющий блок гидравлической части состоит из комбинации входных и рабочих электрических клапанов.
Электрическая часть системы состоит из комбинации электрических клапанов, датчика положения подвижной плиты, датчика оборотов колеса, датчика положения навески, видеокамеры, консоли управления и электронного блока управления.
Центр принятия решений электронного блока управления представляет собой электронно-вычислительную машину, имеющую различные виды интерфейсов для подключения необходимых для принятия решений сигналов датчиков и подачи управляющих сигналов на исполнительный механизм.
Оптико-гидромеханическая система автопозиционирования культиватора работает следующим образом.
Электронный блок управления получает данные от датчика навески. Если навеска находится в опущенном состоянии, то электронный блок управления подает команды по корректировке положения подвижной плиты 4, в противном случае система не работает и находится в режиме ожидания.
Получив положительный ответ от датчика навески, система начинает обрабатывать данные от видеокамеры, датчика положения подвижной плиты и датчика оборотов колеса, также процесс обработки данных транслируется на консоль управления. Данные от видеокамеры представляют собой последовательность изображений на которых расположены ряды культурных растений. Система распознает их и сравнивает с положением почвообрабатывающего агрегата представленного в виде параллельных линий обозначающих траекторию движения рабочих органов. В том случае если есть расхождение в местоположении культурных растений и линий траектории движения рабочих органов электронный блок управления дает команду на корректировку местоположение подвижной плиты 4, учитывая скорость движения машинно-тракторного агрегата рассчитывая ее как обороты колеса за единицу времени.
Сигналы от электронного блока управления приходят на блок электрических клапанов, которые в свою очередь подают необходимый поток масла на гидромотор 2, который вращаясь в необходимую для смещения подвижной плиты 4 сторону посредством зубчатого колеса 3 и зубчатой рейки 8 производит смещение подвижной плиты 4 относительно неподвижного корпуса 1, а значит и смещает почвообрабатывающий агрегат.
Корректировка повторяется неограниченное количество раз при условиях опущенной навески и движения машинно-тракторного агрегата. Необходимые параметры: инерционность системы, пределы величин междурядья, размеры и цвета растений задаются посредством консоли оператора расположенной в кабине энергетического средства.
Таким образом, предлагаемая оптико-гидромеханическая система автопозиционирования культиватора обеспечивает повышение качества междурядной обработки почвы за счет постоянной высокой точности движения культиватора.
Список использованной литературы.
1. Культиваторы для пропашных культур MULTICROP [Сайт] URL: https://www.monosem.ru /Linejka-produkcii/Linejka-kul-tivatorov/ MULTICROP (Дата обращения 01.12.2018).
2. Автоматическая система подруливания „Steer assist" для межрядных культиваторов [Сайт] URL: http://www.hatzenbichler.ru/about/news/2904/?sphrase_id=788 (Дата обращения 01.12.2018).
3. Автопилот для полностью автоматического управления пропашными культиваторами FP161 [Сайт] URL: http://www.newtechagro.ru/ catalog/strip_till_tehnologiya_striptillrf.html (Дата обращения 01.12.2018).
4. Автоматическая система управления при помощи камеры ROW-GUARD [Сайт] URL: https://www.einboeck.at/index.php?option=com_content&view=article&id=1591&Itemid=665&lang=ru (Дата обращения 01.12.2018).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| ПРОПАШНОЙ ФРЕЗЕРНЫЙ КУЛЬТИВАТОР | 1998 |
|
RU2169446C2 |
| Машина для междурядной и приствольной обработки почвы | 2023 |
|
RU2814021C1 |
| Навесной культиватор для междурядной обработки пропашных культур | 1960 |
|
SU137323A1 |
| Синхронизатор скоростей приводных колес трактора и рабочих органов культиватора при обработке пропашных культур в рядках и междурядьях | 1958 |
|
SU122963A1 |
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| Машина для междурядной и приствольной обработки почвы | 2022 |
|
RU2806588C1 |
| Культиватор | 1990 |
|
SU1773315A1 |
| СЕКЦИЯ СЕЯЛКИ-КУЛЬТИВАТОРА | 2020 |
|
RU2762876C1 |

Изобретение относится к сельскохозяйственному машиностроению. Оптико-гидромеханическая система автопозиционирования культиватора содержит электронный блок управления, к которому подключены видеокамера, датчик оборота колес, датчик навески, датчик положения подвижной плиты и гидромеханический модуль. Гидромеханический модуль включает неподвижный корпус с направляющими и соединенный с ним посредством скользящей опоры, подвижную плиту с крепежными отверстиями. Неподвижный корпус оснащен гидромотором с шестерней, а подвижная плита в верхней части имеет форму зубчатой рейки и соединена с гидромотором посредством зубчато-реечной передачи, обеспечивающей перемещение подвижной плиты относительно неподвижного корпуса в поперечном направлении. Обеспечивается повышение качества междурядной обработки. 2 ил.
Оптико-гидромеханическая система автопозиционирования культиватора, состоящая из электронного блока управления, к которому подключены видеокамера, датчик оборота колес, датчик навески, датчик положения подвижной плиты и гидромеханический модуль, включающий неподвижный корпус с направляющими и соединенный с ним посредством скользящей опоры, подвижную плиту с крепежными отверстиями, отличающаяся тем, что неподвижный корпус оснащен гидромотором с шестерней, а подвижная плита в верхней части имеет форму зубчатой рейки и соединена с гидромотором посредством зубчато-реечной передачи, обеспечивающей перемещение подвижной плиты относительно неподвижного корпуса в поперечном направлении.
| US 2018376128 A1, 27.12.2018 | |||
| US 5515928 A, 14.05.1996 | |||
| US 2015230390 A1, 20.08.2015 | |||
| DE 19627139 A1, 15.01.1998 | |||
| Устройство для автоматического направления сельскохозяйственной машины по рядкам или междурядьям стеблевых культур | 1977 |
|
SU631100A2 |

