Заявленное изобретение относится к системам доставки груза в заданную область для его перезагрузки на другое транспортное средство с использованием механических грузозахватных устройств, приспособленных для использования с крановыми механизмами для подъема, опускания и перемещения грузов, для укладки грузов в желаемом положении.
Известен способ и устройство для доставки зенитных управляемых ракет (ЗУР) к месту развертывания мобильной пусковой установки (ПУ), куда снаряженную сменную кассету с ЗУР транспортируют с помощью транспортно-заряжающей машины (ТЗМ), оборудованной манипулятором. Заряжание мобильной ПУ производят следующим образом: к грузозахватным устройствам кассеты подсоединяют грузовую траверсу, установленную на манипуляторе, с помощью которого затем приподнимают сменную кассету на заданную высоту и переносят ее на ПУ, где ее устанавливают на опорной раме качающейся части ПУ и закрепляют с помощью откидных болтов, входящих в пазы нижних опорных элементов кассеты. Затем аналогичным образом поверх установленной кассеты устанавливают еще одну кассету, обеспечивая прилегание опорных балок кассет к опорной раме качающейся части ПУ, обеспечивая таким образом равномерную передачу нагрузок при пуске ракет из транспортно-пускового контейнера (ТПК). После этого ТПК подключают к системе управления пуском [1].
В аналоге [1] задача перемещения кассеты с ЗУР описана в самом общем виде, поскольку изобретение направлено на обеспечение надежности крепления кассеты к качающейся части ПУ, в то время как в заявленном изобретении надежность крепления обеспечивается конструктивно иным путем, что ставит перед разработчиком задачу ориентации кассеты над шахтой боевой машины.
Наиболее близким аналогом, принятым за прототип, является [2] способ погрузки-разгрузки ракетных модулей с ЗУР, каждый из которых состоит из контейнера с ячейками ЗУР [3], в районе перезарядки боевых машин, и средство для его осуществления – транспортно-заряжающая машина, служащая для доставки ракетного модуля с ЗУР к месту перезарядки и оборудованная краноманипуляторной установкой и кантователем, а также боевая машина, оборудованная вертикально ориентированными шахтами для загрузки в них ракетных модулей с ЗУР. Перезарядка заключается в выгрузке разряженных модулей из шахт боевой машины и загрузке в них ракетных модулей с ЗУР, доставленных на транспортно-заряжающей машине.
Выгрузка разряженных модулей с прибывшей на перезарядку боевой машины осуществляется при помощи краноманипуляторной установки, установленной на транспортно-заряжающей машине и снабженной выдвижными гидравлическими опорами.
Модули с ЗУР доставляются к месту перезарядки боевых машин в горизонтальном положении на грузовой платформе транспортно-заряжающей машины. Для их загрузки в вертикально ориентированные шахты боевых машин используется кантователь, выполненный с возможностью его подвешивания на краноманипуляторной установке и установки на ракетный модуль с ЗУР.
С учетом размеров ракетных модулей с ЗУР и ограничений на грузоподъемность, а также на размеры колесного транспорта для обеспечения безопасности его движения по бездорожью к месту перезарядки боевых машин, за один рейс транспортно-заряжающая машина перевозит два ракетных модуля ЗУР, установленных в горизонтальном положении на ее грузовой платформе.
Перезарядка начинается после прибытия транспортно-заряжающей машины в район нахождения боевых машин с перевода транспортно-заряжающей машины и краноманипуляторной установки из транспортного в рабочий режим. Затем при помощи краноманипуляторной установки кантователь устанавливается на ракетном модуле с ЗУР, после чего происходит перемещение краноманипуляторной установкой связки кантователя и ракетного модуля с ЗУР на боевую машину, причем в процессе перемещения ракетный модуль с ЗУР остается в горизонтальном положении.
После того, как оголовок стрелы краноманипуляторной установки достигает корпуса боевой машины и связка кантователя с ракетным модулем устанавливается на боевой машине над шахтой, стрелу краноманипуляторной установки отцепляют от кантователя.
Далее боевой расчет при помощи кантователя переводит ракетный модуль с ЗУР в вертикальное положение и по специальным направляющим, выполненным в шахте боевой машины, ракетный модуль с ЗУР опускается в шахту. После чего кантователь при помощи краноманипуляторной установки возвращают на транспортно-заряжающую машину.
Ближайший аналог, выбранный в качестве прототипа, обладает следующими недостатками:
- способ не обладает необходимым быстродействием при перезагрузке ракетных модулей с ЗУР с транспортно-заряжающей машины в шахту боевой машины, что влияет как на оперативность перезарядки боевых машин, так и на безопасность, поскольку в процессе перезарядки техника, ракетные модули с ЗУР и боевые расчеты находятся в зоне риска длительное время, что увеличивает угрозу их безопасности;
- низкая производительность из-за малого количества ракетных модулей с ЗУР, доставляемых транспортно-заряжающей машиной за один рейс к месту перезарядки и затем одной боевой машиной к месту назначения.
Недостатком транспорно-заряжающей машины является ее низкая грузоподъемность, что снижает производительность способа доставки.
Кроме перечисленных недостатки прототипа в части недостаточного быстродействия и значительной трудоемкости обусловлены изложенными ниже причинами.
Кантователь в прототипе является средством для поворота ракетного модуля в вертикальное положение, используемым на борту боевой машины. Для этого кантователь перевозится в место перезарядки на транспортно-заряжающей машине, где для него требуются дополнительные пространство и грузоподъемность, затем кантователь перемещают на боевую машину вместе с ракетным модулем с ЗУР для того, чтобы придать ракетному модулю с ЗУР требуемое положение при опускании его в вертикально ориентированную шахту, а затем краноманипуляторной установкой кантователь переносят обратно на транспортно-заряжающую машину для того, чтобы установить его на следующем ракетном модуле с ЗУР. Очевидно, что такое «нецелевое» использование кантователя приводит к снижению быстродействия способа, к повышению его трудоемкости и к выработке ресурса, в частности, краноманипуляторной установки, который расходуется на выполнение действий, не связанных непосредственно с перезарядкой, для которой оборудование должно использоваться.
Сущность изобретения.
Заявленное изобретение направлено на устранение перечисленных недостатков ближайшего аналога. Технический результат, достигаемый в заявленном способе, заключается в снижении трудоемкости, в повышении безопасности, быстродействия разгрузки-погрузки ракетных модулей с ЗУР в месте зарядки боевых машин, в повышении производительности способа доставки ракетных модулей ЗУР, в увеличении срока службы транспортно-заряжающей машины с краноманипуляторной установкой. А также увеличение грузоподъемности транспортно-заряжающей машины с одновременным выполнением требований по обеспечению проходимости по бездорожью, таким как необходимый угол съезда и минимальный радиус поворота.
Сущность заявленного изобретения заключается в повышении быстродействия, безопасности и производительности за счет того, что ракетные модули с ЗУР переводят из транспортного (горизонтального) положения в вертикальное на борту транспортно-заряжающей машины, за счет повышения грузоподъемности транспортно-заряжающей машины с соблюдением требований по обеспечению ее проходимости по бездорожью, что также позволяет обеспечить возможность производить перезарядку одновременно нескольких боевых машин, встающих на перезарядку с разных сторон транспортно-заряжающей машины, что также позволяет повысить производительность и быстродействие перезарядки.
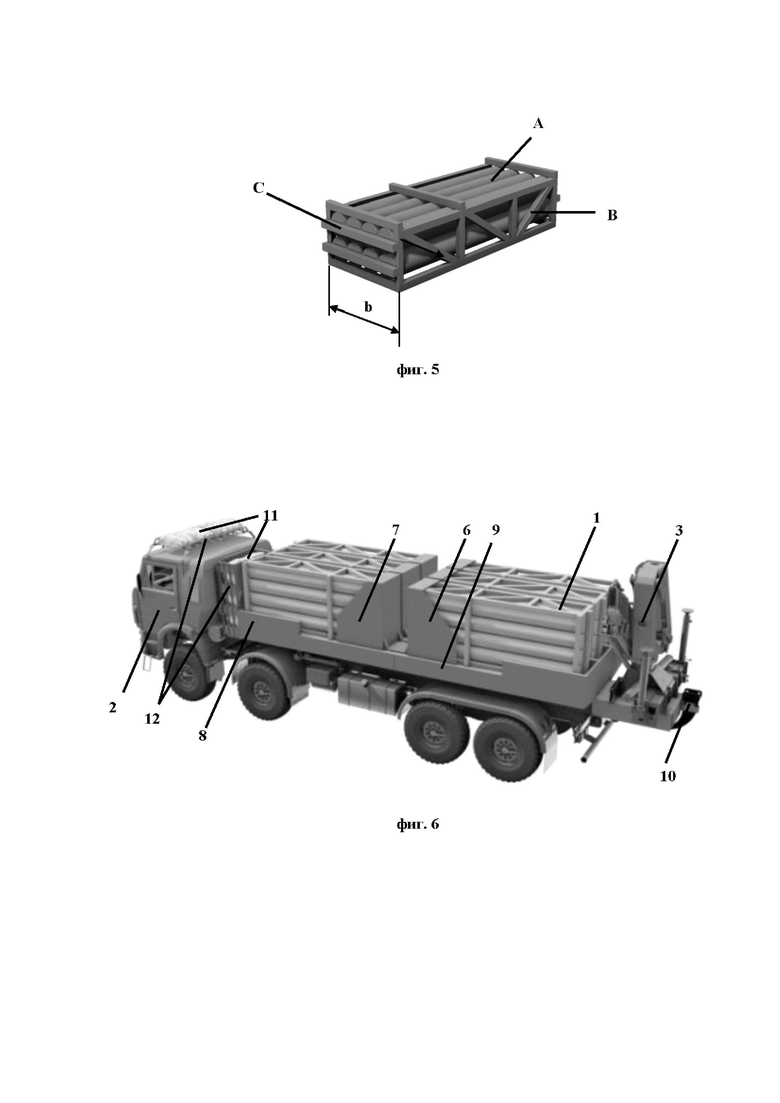
Ракетный модуль с ЗУР имеет форму параллелепипеда с гранями А, В и С, как это представлено на фиг.5.
При погрузке на транспортно-заряжающую машину их укладывают на ее грузовую платформу в несколько рядов. Одновременно с укладкой каждый ракетный модуль фиксируется в горизонтальном положении, при котором к полу грузовой платформы обращена его грань В.
После заполнения грузовой платформы ракетными модулями с ЗУР оборудование транспортно-заряжающей машины приводится в транспортное положение и она отбывает к месту зарядки боевых машин.
Перед погрузкой на боевую машину все ракетные модули с ЗУР из одного ряда из горизонтального положения переводятся на грузовой платформе транспортно-заряжающей машины в вертикальное положение, что позволяет отказаться от использования кантователя в качестве средства для установки ракетного модуля с ЗУР в вертикальное положение на борту боевой машины, что в свою очередь снижает трудоемкость процесса погрузки-разгрузки и повышает его быстродействие и сберегает ресурс краноманипуляторной установки.
Ракетный модуль с ЗУР доставляется на боевую машину в вертикальном положении, за счет чего снижается трудоемкость способа на этапе приведения модуля в вертикальное положение для загрузки в шахту боевой машины, увеличивается быстродействие способа за счет упрощения операции установки модуля в вертикальное положение: заявленный способ не требует подвешивания кантователя на краноманипуляторной установке с последующим захватом ракетного модуля с ЗУР кантователем, расчету боевой машины не требуется выставлять кантователь с модулем у входа в шахту боевой машины, не требуется отсоединять кантователь от стрелы краноманипуляторной установки. Увеличение быстродействия влечет за собой снижение рисков для боевого расчета и техники, находящихся в уязвимом положении во время операции перезарядки.
Выполнение грузовой платформы транспортно-заряжающей машины в заявленном изобретении с большей грузоподъемностью, чем в прототипе, происходит за счет использования шасси с большей грузоподъемностью. При этом выполнение грузовой платформы транспортно-заряжающей машины в заявленном изобретении из неподвижных и выдвижных частей позволяет обеспечить в транспортном положении (грузовая платформа находится в сдвинутом состоянии) необходимые для езды в условиях бездорожья угол съезда и минимальный радиус поворота.
И, кроме того, такая конструкция позволяет в рабочем положении (грузовая платформа находится в раздвинутом состоянии) обеспечить наличие необходимого пространства между поворотными держателями для возможности их поворота из горизонтального положения в вертикальное.
В целом заявленная конструкция транспортно-заряжающей машины позволяет повысить производительность заявленного изобретения, сократить время доставки требуемого количества ракетных модулей с ЗУР к месту перезарядки, а от него к заданному месту доставки, увеличить быстродействие процесса перезарядки.
Установка на каждой части грузовой платформы поворотного держателя, в котором ракетные модули фиксируются в транспортном положении и поворотом которого ракетные модули с ЗУР переводятся в вертикальное положение в процессе перезарядки боевых машин, позволяет повысить быстродействие способа.
По прибытии в место перезарядки и переводе транспортно-заряжающей машины в рабочее положение, производится выдвижение выдвижных частей грузовой платформы, при этом между подвижной и неподвижной частями грузовой платформы образуется пространство, размер которого вдоль грузовой платформы превышает высоту поворотного держателя. За счет образования такого свободного пространства появляется возможность повернуть поворотный держатель с зафиксированными в нем ракетными модулями ЗУР из горизонтального (транспортного) положения в вертикальное (рабочее) положение, при котором все ракетные модули с ЗУР, зафиксированные в нем, обращены гранью С (фиг. 5) к грузовой платформе. За счет выбранного таким образом размера пространства между поворотными держателями исключена возможность контакта ракетных модулей, повернутых в вертикальное положение, с ракетными модулями с ЗУР, находящимися на другой части грузовой платформы в горизонтальном положении, что исключает возможность повреждения ракетных модулей.
После того, как все ракетные модули с ЗУР из первого ряда будут загружены с помощью краноманипуляторной установки на боевые машины, а освободившиеся секции поворотного держателя будут загружены разряженными ракетными модулями, поступившими с боевых машин, поворотный держатель приводится в транспортное положение. По мере зарядки ракетными модулями с ЗУР боевые машины отбывают к месту назначения.
Следующий поворотный держатель, установленный на неподвижной части грузовой платформы, с ракетными модулями ЗУР переводится в вертикальное положение и производится дальнейшая перезарядка боевых машин с перемещением с грузовой платформы транспортно-заряжающей машины с помощью краноманипуляторной установки вертикально ориентированных ракетных модулей с ЗУР в вертикально ориентированные шахты боевых машин и с погрузкой на транспортно-заряжающие машины разряженных ракетных модулей. Непрерывность процесса погрузки-загрузки, одновременность приведения всех ракетных модулей с ЗУР одного ряда в вертикальное положение, повышают быстродействие способа.
Увеличение числа ракетных модулей с ЗУР, перевозимых за один рейс транспортно-заряжающей машиной с увеличенной грузоподъемностью со склада к месту перезарядки, одновременная загрузка нескольких боевых машин ракетными модулями с ЗУР повышает производительность заявленного изобретения и скорость доставки требуемого количества ракетных модулей к месту доставки.
Сущность изобретения поясняется графическими материалами, представленными на фигурах 1-10, которые относятся к конкретным примерам осуществления способа и выполнения транспортно-заряжающей машины:
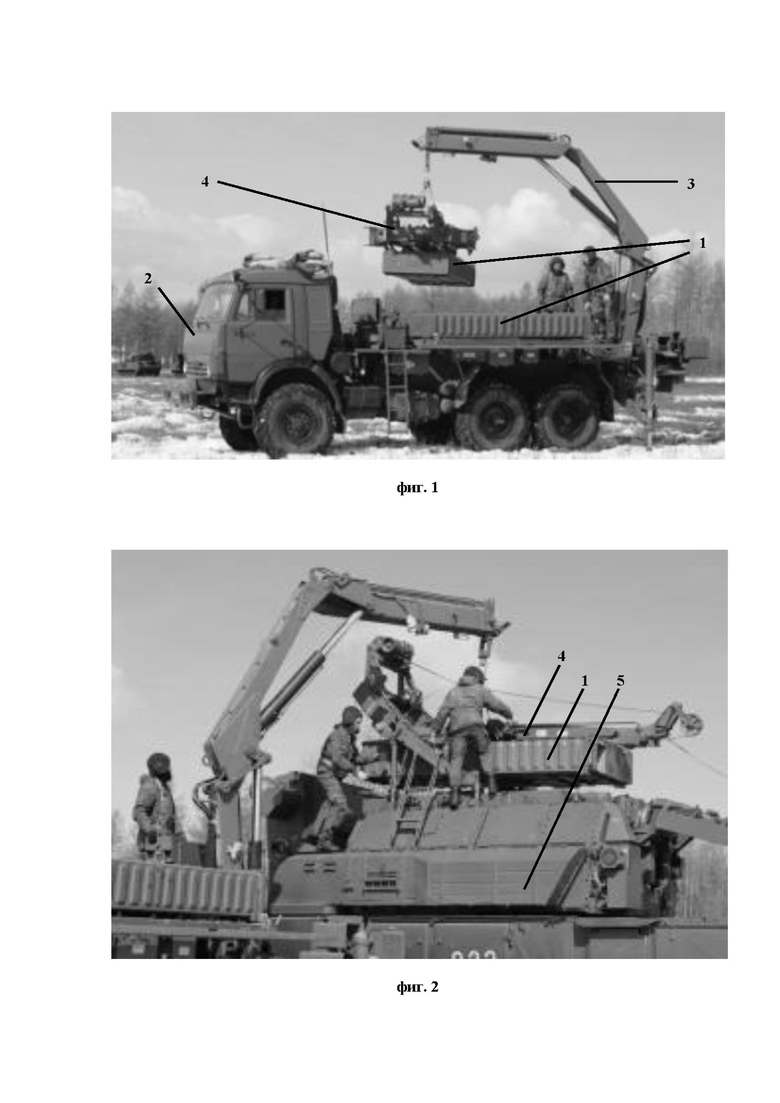
На фиг. 1 представлено изображение транспортно-заряжающей машины из прототипа, краноманипуляторная установка которой перемещает кантователь с ракетным модулем ЗУР в горизонтальном положении на боевую машины, где приняты следующие обозначения:
1 - ракетный модуль
2 - транспортно-заряжающая машина
3 - краноманипуляторная установка
4 - кантователь.
На фиг. 2 представлено изображение боевой машины 5 из прототипа в момент, когда оголовок стрелы краноманипуляторной установки 3 с кантователем 4 и ракетным модулем 1 находится над корпусом боевой машины.
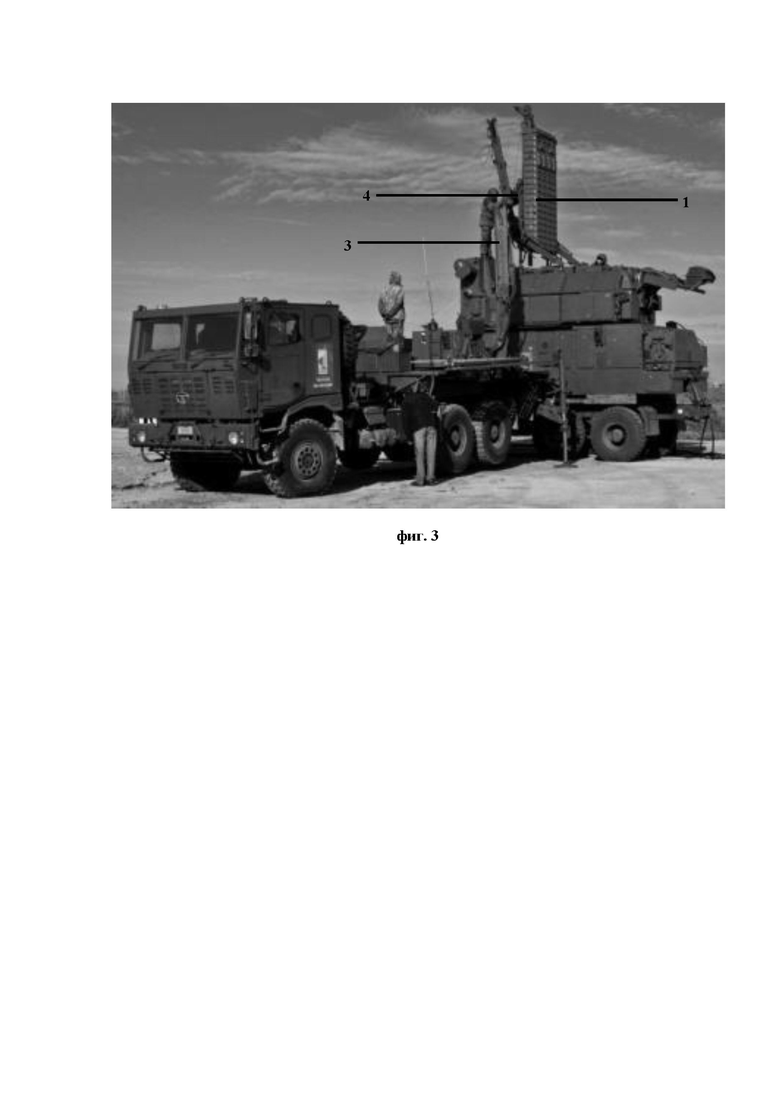
На фиг.3 показано как в прототипе стрелу краноманипуляторной установки 3 отцепляют от кантователя 4, который переводит контейнер ракетного модуля ЗУР 1 в вертикальное положение.
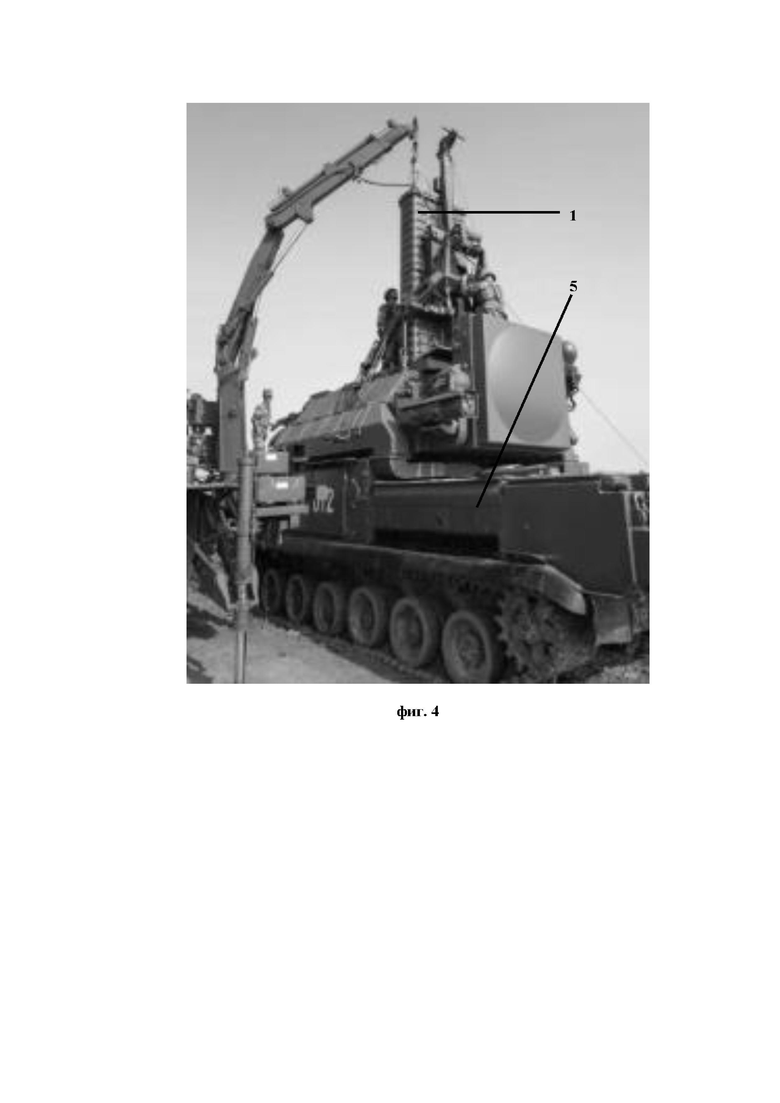
На фиг.4 показано, как в прототипе происходит опускание ракетного модуля ЗУР 1 в шахту боевой машины 5 по специальным направляющим (на фиг.4 не показаны).
На фиг.5 представлено изображение ракетного модуля с ЗУР, где А, В и С-условные обозначения его граней, при этом ребро между гранями А и В-это длина модуля, ребро между гранями В и С - его высота, а ребро между гранями А и С- ширина (обозначено как «b»).
На фиг.6 представлено изображение транспортно-заряжающая машина 2, предназначенная для доставки ракетных модулей со склада в район расположения боевых машин и их зарядки, где приняты следующие обозначения:
1 – ракетный модуль с ЗУР
2 – транспортно-заряжающая машина
3 - краноманипуляторная установка
6 - задний поворотный держатель
7 - передний поворотный держатель
8 - неподвижная часть грузовой платформы
9 - выдвижная часть грузовой платформы
10 - клык-рыхлитель
11 - маскировочные сети
12 - держатели маскировочных цепей.
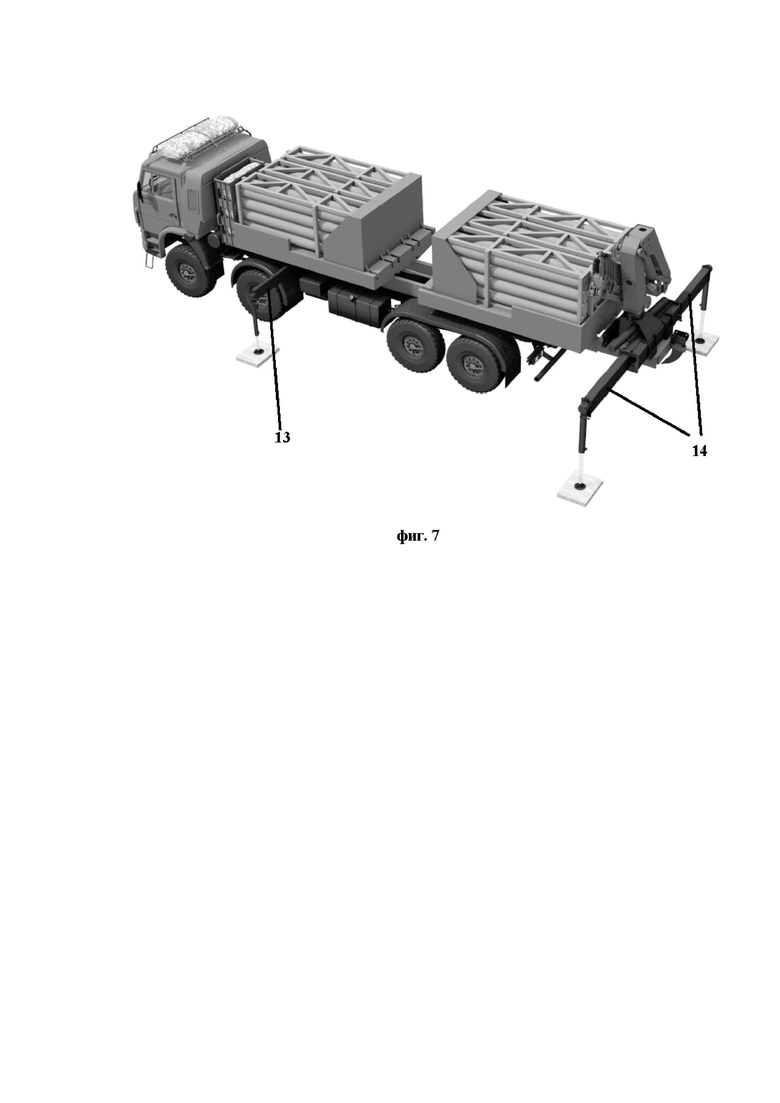
На фиг. 7 показано вывешивание и горизонтирование транспортно-заряжающей машины на выдвижных опорах, где приняты следующие обозначения:
13 - передние выдвижные опоры,
14 - задние выдвижные опоры.
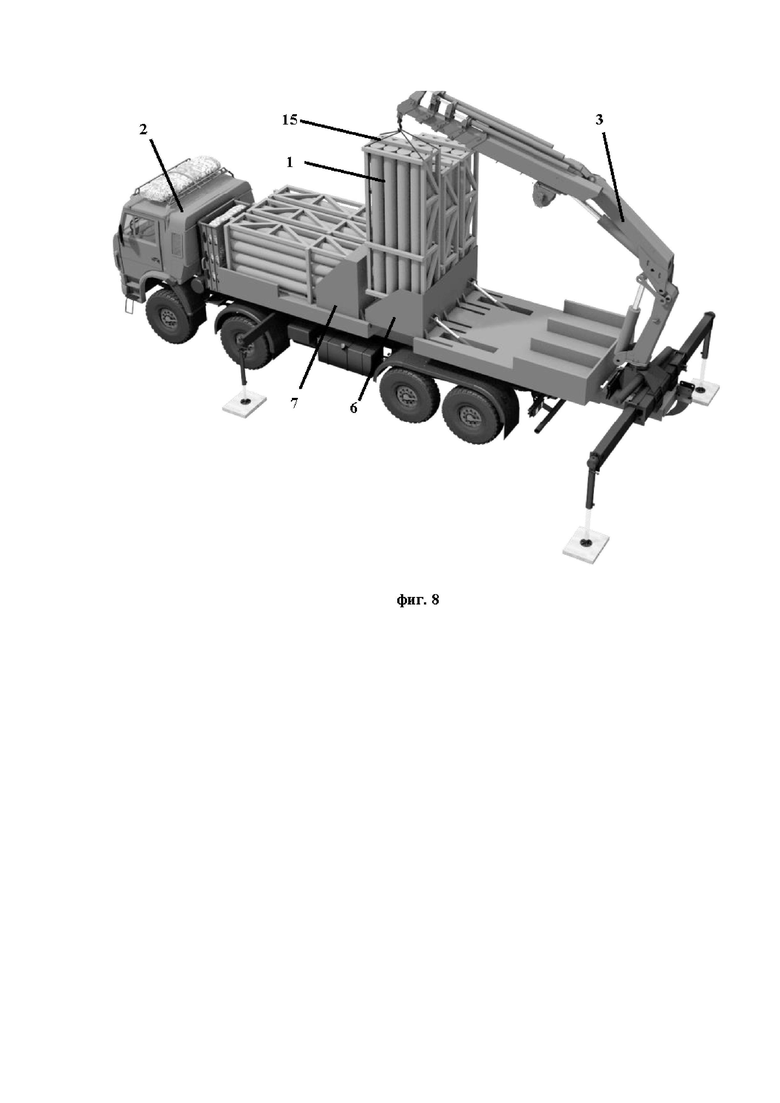
На фиг. 8 показана транспортно-заряжающая машина 2 с передним поворотным держателем 7 в транспортном положении, с выдвижной частью грузовой платформы 9 в выдвинутом положении, с повернутым против часовой стрелки на 90° задним поворотным держателем 6 и с зачаленным краноманипуляторной установкой 3 при помощи средства крепления 15 ракетным модулем с ЗУР 1
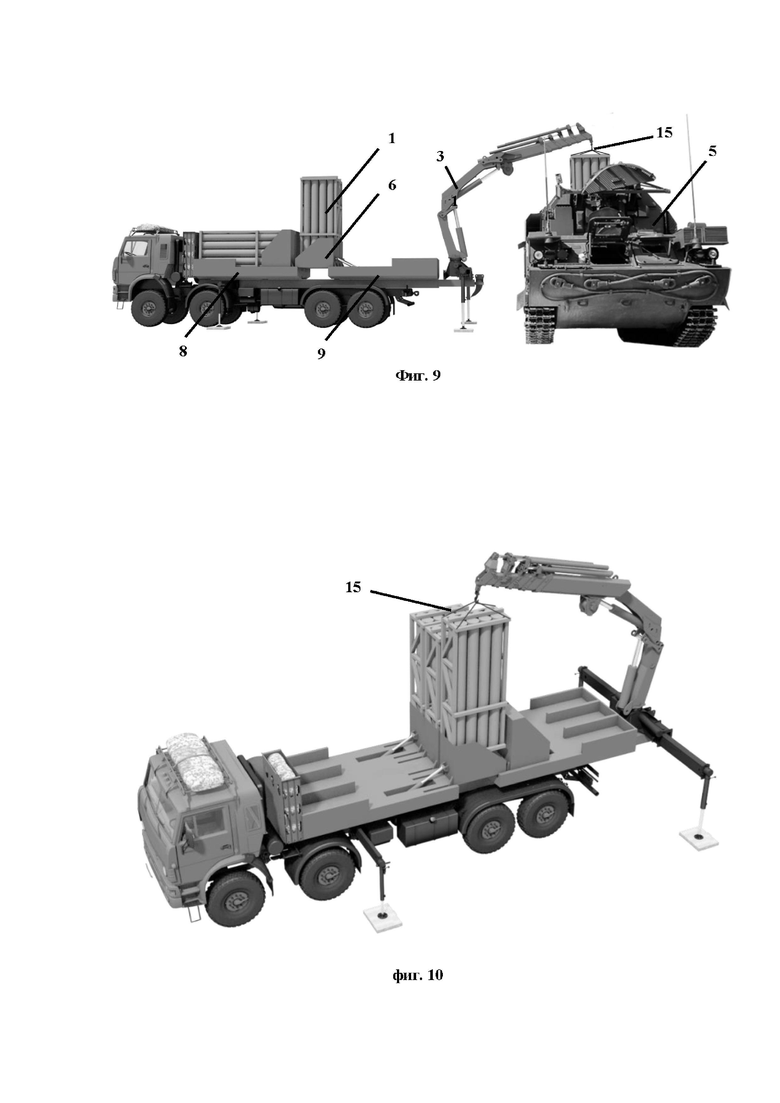
На фиг. 9 показана транспортно-заряжающая машина 2 с повернутым по часовой стрелке на 90° передним поворотным держателем 7, с выдвижной частью грузовой платформы 9 в выдвинутом положении, и с прикрепленным к краноманипуляторной установке 3 ракетным модулем с ЗУР 1 из переднего держателя 7.
На фиг. 10 показана загрузка в шахту боевой машины 5 прикрепленного к краноманипуляторной установке 3 при помощи средства крепления 15 ракетного модуля 1 находящегося в вертикальном положении.
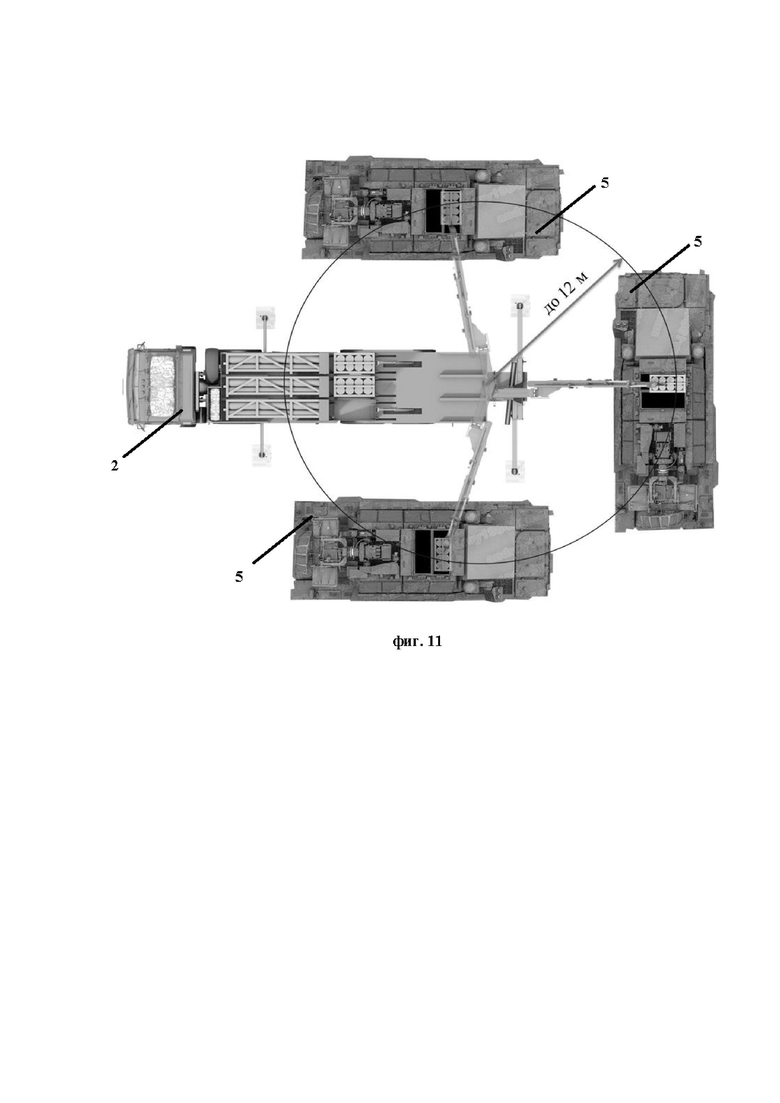
На фиг. 11 показано взаимное положение транспортно-заряжающей машины 2 и боевых машин 5 при их зарядке.
Осуществление изобретения.
К месту зарядки боевых машин 5 (фиг.4) ракетные модули с ЗУР 1 доставляются транспортно-заряжающей машиной 2. Ракетные модули установлены и закреплены в поворотных держателях 6 и 7, выполненных соответственно на выдвижной 9 и неподвижной 8 частях грузовой платформы.
Транспортно-заряжающая машина 2 прибывает в место зарядки боевых машин, где она из транспортного положения переводится в рабочее, при котором производится выдвижение выдвижной части грузовой платформы, развертывание краноманипуляторной установки 3 и ее горизонтирование. Между частями 8 и 9 грузовой платформы образуется пространство, размеры которого превышают ширину (размер b на фиг.5) ракетного модуля 1. Поворотный держатель 7 с ракетным модулем с ЗУР 1 разворачивается из транспортного горизонтального положения в вертикальное.
Во время перевода транспортно-заряжающей машины 2 в рабочее положение к ней подъезжает боевая машина 5 на зарядку.
В это время краноманипуляторная установка 3 разворачивается таким образом, чтобы ее крюк оказался над разряженным ракетным модулем, находящимся в шахте прибывшей на зарядку боевой машины 5, зачаливает его и поднимает из шахты.
После чего краноманипуляторная установка 3 поворачивается в сторону от боевой машины 5 и опускает разряженный ракетный модуль на землю, затем разворачивается таким образом, чтобы ее крюк оказался над ракетным модулем с ЗУР 1, развернутым при помощи поворотного держателя в вертикальное положение. Производится зачаливание ракетного модуля 1, его подъем из поворотного держателя и перенос в вертикальном положении к боевой машине до достижения модулем положения над свободной шахтой, в которую краноманипуляторная установка 3 его опускает.
Затем ракетный модуль 1 отсоединяют от краноманипуляторной установки 3, которая разворачивается к следующему разряженному ракетному модулю, производится прикрепление к ней разряженного ракетного модуля, его перенос и установка в поворотном держателе на грузовой платформе транспортно-заряжающей машины 2.
Перечисленные операции совершаются до полного заряжения боевой машины. После чего она отбывает к месту назначения. Боевых машин 5, одновременно находящихся в процессе заряжения, может быть несколько, при этом они могут вставать на перезарядку как сзади, так и по бокам транспортно-заряжающей машины 2, с выполнением условия досягаемости для краноманипуляторной установки 3 вертикальных шахт боевых машин 5. Завершается процесс перезарядки тем, что краноманипуляторная установка 3 поднимает с земли разряженный ракетный модуль, который первым был выгружен с боевой машины 5, устанавливает его в свободную секцию поворотного держателя на грузовой платформе, после чего краноманипуляторная установка 3 и транспортно-заряжающая машина 2 переводятся в транспортное положение и транспортно-заряжающая машина отбывает к месту склада.
Выше было описано выполнение транспортно-заряжающей машиной 2 с грузовой платформой, выполненной из двух частей- одной неподвижной 8 и другой выдвижной- 9.
Более подробное изложение осуществления заявленного изобретения с использованием транспортно-заряжающей машины 2 с грузовой платформой, выполненной из двух частей –одной неподвижной и другой, выдвижной, приводится ниже.
В Таблице 1 приведены основные технические характеристики транспортно-заряжающей машины и установленной на ней краноманипуляторной установки в исполнении, предназначенном для перевозки из полевого склада и загрузки в боевые машины в пункте зарядки 6, т.е. в три раза больше, чем в прототипе. ракетных модулей с ЗУР, каждый из которых имеет габаритные размеры 3050х1280х680 мм и массу 1650 кг.
Таблица 1
 10
10
*Примечание: При использовании двукратного полиспаста масса грузов,
поднимаемых с помощью грузовой лебедки, увеличивается до 3,8 т.
Грузовая платформа транспортно-заряжающей машины, как это показано на фиг.6, состоит из неподвижной 8 и выдвижной 9 частей. На выдвижной части 9 грузовой платформы шарнирно закреплена краноманипуляторная установка 3, выполненная с возможностью разворотов в горизонтальной плоскости (см. Таблицу 1 и фиг.11).
Два поворотных держателя 6, 7, по одному на каждой из частей грузовой платформы, закреплены с использованием шарнирных осей и замков поворотного типа (твистлоков). Поворотные держатели выполнены секционными, в описываемом примере в каждом поворотном держателе выполнено по три секции, для размещения в каждой из них по одному ракетному модулю.
Ракетные модули устанавливаются в секционные поворотные держатели 6,7 таким образом, что в транспортном положении к полу грузовой платформы обращены их грани В, т.е. грани, сторонами которых являются длина и высота модуля. Для ракетных модулей, для перевозки и загрузки которых предназначены транспортно-заряжающие машины и краноманипуляторные установки, чьи технические характеристики приведены в Таблице 1, это грань со сторонами размером 3050мм и 680 мм.
По прибытии транспортно-заряжающей машины 2 с модулями ЗУР 1 в район зарядки боевых машин 5, осуществляется выдвижение выдвижной части грузовой платформы 9 с краноманипуляторной установкой 3. Неподвижная часть 8 грузовой платформы представляет собой силовую металлическую конструкцию, которая крепится к лонжеронам шасси. К неподвижной части 8 грузовой платформы приварены передние выдвижные опоры 13. Передние выдвижные опоры 13 вместе с задними выдвижными опорами 14, являющимися составной частью краноманипуляторной установки 3, как это показано на фиг.7, необходимы для горизонтирования грузовой платформы и создания необходимого опорного контура.
За счет наличия двух пар выдвижных опор для проведения операций по выгрузке и погрузке на транспортно-заряжающую машину 2 ракетных модулей с ЗУР и разряженных модулей не требуется специально оборудованная площадка.
Выдвижение выдвижной части грузовой платформы 9, а также поворот держателя 7 в вертикальное положение и обратно, осуществляется при помощи гидроцилиндров, установленных на неподвижной части грузовой платформы 8.
Гидроцилиндры, установленные на выдвижной части грузовой платформы 9, служат для поворотов из горизонтального положения в вертикальное и обратно краноманипуляторной установки 3 и для поворота держателя 6 в вертикальное положение и обратно.
В результате выдвижения выдвижной части грузовой платформы 9 между двумя поворотными держателями 6 и 7 образуется пространство, превышающее по размеру вдоль продольной оси грузовой платформы транспортно-заряжающей машины 2 размер b ракетного модуля с ЗУР 1 (фиг.5), которое используется для поочередной установки держателей 6 и 7 в вертикальное положение.
Далее, как это показано на фиг.10 производится горизонтирование транспортно-заряжающей машины 2 на выдвижных передних 13 и задних 14 опорах.
Одновременно с горизонтированием транспортно-заряжающей машины 2 производится перевод краноманипуляторной установки 3 из транспортного положения в рабочее. Боевые машины 5 могут устанавливаться под погрузку по обеим сторонам транспортно-заряжающей машины 2, а также за транспортно-заряжающей машиной 2, как это показано на фиг.11.
Затем производится выгрузка при помощи краноманипуляторной установки 3 первого разряженного модуля из боевой машины 5 и складирование его на земле в зоне, где он не будет помехой процессу перезарядки боевых машин 5.
Заявленная транспортно-заряжающая машина 2 в частном случае может обеспечить погрузку (выгрузку) и транспортирование 6-ти ракетных модулей с ЗУР 1, каждый из которых имеет габаритные размеры 3050х1280х680 мм и массу 1650 кг. В транспортном положении ракетные модули с ЗУР расположены на грузовой платформе транспортно-заряжающей машины 2 в два ряда: по три в каждом из двух поворотных держателей 6, 7, установленных соответственно на выдвижной 9 и неподвижной 8 частях грузовой платформы, как это показано на фиг.6.
Поворотные держатели 6, 7 закреплены соответственно на подвижной 9 и неподвижной 8 частях грузовой платформы с использованием шарнирных осей и замков поворотного типа (твистлоков).
Краноманипуляторная установка 3 состоит из основания, поворотной колонны, выдвижных гидравлических опор, рукояти, а также основания стрелы, телескопируемых секций стрелы, механизма поворота, гидравлического и электрического оборудования. Управление кранманипуляторной установкой 3 может осуществляться как рычагами со стационарных постов управления, расположенных по обоим бортам транспортно-заряжающей машины 2, так и с дистанционного пульта управления. Дистанционное управление производится с использованием кабеля или радиосигналов.
Краноманипуляторная установка 3 транспортно-заряжающей машины 2 обеспечивает максимальный грузовой момент 24,1 тм. Вылет стрелы может изменяться в интервале от 2,0 до 12,0 м (максимальный 12-метровый вылет показан на фиг.11). Максимальная грузоподъемность краноманипуляторной установки достигает 7,2 т. При этом грузы массой до 1,8 т могут телескопироваться выдвижными секциями стрелы вплоть до максимального вылета.
Наибольшая высота подъема стрелы от уровня земли в рабочем положении составляет 15,0 м.
Далее поворотный держатель кассет 6 поворотом против часовой стрелки переводится в вертикальное положение, занимая пространство между выдвижной 9 и неподвижной 8 частями грузовой платформы. При этом между поворотными держателями 6 и 7 сохраняется расстояние, исключающее повреждение контейнеров ракетных модулей ЗУР 1.
Система безопасности и управления транспортно-заряжающей машины 2 разрешает работу поворотных держателей 6, 7 только при выдвинутой выдвижной 9 части грузовой платформы. При этом для исключения столкновения держателей 6 и 7 друг с другом каждый из держателей может начать поворачиваться в вертикальное положение только при условии, что второй держатель находится в горизонтальном положении.
Одновременно с переводом держателя 6 ракетного модуля ЗУР 1 в вертикальное положение, краноманипуляторная установка 3 разворачивается таким образом, чтобы её оголовок стрелы оказался над ракетным модулем ЗУР 1. Ракетный модуль 1 крепится к краноманипуляторной установке 3, и начинается процесс его подъёма как это показано на фиг.8 с последующим перемещением и опусканием в шахту боевой машины 5 как это показано на фиг.9. Крепление ракетного модуля к краноманипуляторной установке может производиться как жесткими средствами(траверсой), так и мягкими- стропами (как это показано на фиг. 8, 10).
После того, как из поворотного держателя будут извлечены все заряженные ракетные модули и на их место будут установлены разряженные, он переводится снова в транспортное (горизонтальное) положение, освобождая пространство между неподвижной 8 и выдвижной 9 частями грузовой платформы для возможности перевода поворотного держателя 7, установленного на неподвижной части грузовой платформы 8, в вертикальное положение поворотом по часовой стрелке, с тем чтобы он занял положением в пространстве между неподвижной 8 и выдвижной 9 частями платформы. Процесс загрузки боевых машин 5 ракетными модулями с ЗУР 1 из секционного поворотного держателя 7, установленного на неподвижной части грузовой платформы 8, продолжается в описанной выше для ракетных модулей с ЗУР 1 из держателя 6 последовательности (фиг.10). Последним в транспортно-заряжающую машину 2 загружается разряженный модуль, который был первым выгружен с боевой машины 5, первой подошедшей к транспортно-заряжающей машине 2 на зарядку.
На фиг.10 показана транспортно-заряжающая машина 2 с повернутым по часовой стрелке на 90° передним держателем 7 и с прикрепленным к краноманипуляторной установке 3 ракетным модулем с ЗУР 1 из переднего секционного держателя 7.
Номер расчета заряжаемой боевой машины 5 направляет ракетный модуль с ЗУР по направляющим в шахту, и затем производят отсоединение стрелы краноманипуляторной установки 3 от ракетного модуля ЗУР 1.
После погрузки боекомплекта в одну из боевых машин 5, она отъезжает и, пока осуществляется загрузка другой машины, освобождает место для установки под зарядку очередной боевой машины. Таким образом, при одном развертывании транспортно-заряжающей машины 2 может быть произведена бесперебойная зарядка боекомплекта в три боевые машины.
После завершения зарядки ракетных боевых модулей ЗУР 1 в боевые машины 5 и погрузки последнего разряженного модуля на борт транспортно-заряжающей машины 2, держатели 6,7 и краноманипуляторная установка 3 переводится в транспортное состояние и машина 2 убывает из района зарядки в район склада для установки в нее заряженных ракетных модулей.
Заявленные способ и устройство для его осуществления позволяют достичь декларируемый технический результат и могут быть реализованы на известных из уровня техники средствах.
Перечень источников, использованных при составлении описания
1. Патент РФ №2567677 на изобретение «Универсальная кассета преимущественно для транспортно-пусковых контейнеров», МПК F41 F 3/042, опубл.10.11.2015.
2. Журнал Национальная оборона №7 за 2020 г. Оборонно-промышленный комплекс, статья «ЗРК семейства «Тор-М2»
3. Ельцин, С.Н. Зенитный ракетный комплекс «Тор-М1»: учеб. пособие. Изд. 2-е, испр. и доп. / С.Н. Ельцин; Балт. гос. техн. ун-т. – СПб., 2015. – стр.10.
4. Патент РФ №2550940 на изобретение «Транспортное средство для перевозки суперконтейнеров с разрядными и экологически опасными грузами», МПК В60Р 01/02, публ.20.06.2015.
5. Патент РФ №2648659 на изобретение «Самоходное бронированное транспортное средство обеспечения разминирования и подготовки объектов к разрушению и крепление для установки навесного оборудования» МПК F41 Н 11/00, опубл.27.03.2018.
6. Машины и оборудование для городского коммунального хозяйства: Справочник / И.А. Засов, Г.Д. Романюк, М.Г. Бутовченко. - М.: Стройиздат, 1994, стр.139.
7. О.А. Смирнов, И.П. Улитенко: Гидравлический автомобильный кран. - М.: Стройиздат, 1982, стр.32.
8. Статья «Анализ кантователей различных видов. Назначение, описание, конструкции, правила использования кантователя, применяемого на учебном посту. Литвиненко» в интернете на странице с адресом http://www.maina-vira.ru/gruzozahvatnyie-prisposobleniya/kantovateli.html
9. Патент РФ №198336 на полезную модель «Траверса для подъема транспортно-пускового контейнера с зенитной управляемой ракетой», МПК В 66С 1/10, опубл. 02.07.2020.
10. Зайцев Л.В., Полосин М.Д. Автомобильные краны. - М.: Высш. школа, 1978
11. Патент РФ №6754 на полезную модель «Транспортное средство», МПК В 60 Р 1/54, опубл. 16.06.1998.
12. Полезная информация на тему «Пропорциональный гидрораспределитель: что это, устройство и сфера применения», размещенная в интернете на странице с адресом https://ctois.ru/poleznaya-informaciya/proporcionalnyj-gidroraspredelitel-chto-eto-ustrojstvo-i-sfera-primeneniya
13. Патент РФ №2374166 «Стреловое устройство крана», МПК В66С 23/64, опубл. 27.11.2009.
14. Авторское свидетельство СССР№ 591393 на изобретение «Оголовок стрелы грузоподъемного крана», МКИ В66 С 23/66, публикация 05.02.78. Бюллетень №5 (51) М. Кл.
15. Полиспасты https://proinstrumentinfo.ru/polispasty-naznachenie-i-ustrojstvo-kratnost-shema-zapasovka/
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| УНИВЕРСАЛЬНЫЙ МИННЫЙ ЗАГРАДИТЕЛЬ | 2000 |
|
RU2185590C2 |
| ТРАНСПОРТНО-СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2350493C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684342C1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| МОБИЛЬНЫЙ БОЕВОЙ ЛАЗЕРНЫЙ КОМПЛЕКС | 2011 |
|
RU2496078C2 |
| МОБИЛЬНАЯ ПУСКОВАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ ИЛИ ПАРОГАЗОГЕНЕРАТОРВ | 2014 |
|
RU2568820C2 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684228C1 |
| МОБИЛЬНЫЙ БОЕВОЙ ЛАЗЕРНЫЙ КОМПЛЕКС И СПОСОБ ПОВЫШЕНИЯ БОЕВОЙ ЭФФЕКТИВНОСТИ КОМПЛЕКСА | 2011 |
|
RU2473039C1 |
Изобретение относится к системам доставки груза в заданную область для его перезагрузки на другое транспортное средство с использованием механических грузозахватных устройств. Для погрузки ракетных модулей ЗУР используют транспортно-заряжающую машину, снабженную краноманипуляторной установкой, укладывают ракетные модули ЗУР на грузовую платформу транспортно-заряжающей машины в горизонтальном положении и доставляют в район зарядки боевых машин с вертикальными шахтами для ракетных модулей с ЗУР, грузят с помощью краноманипуляторной установки в вертикальные шахты боевой машины отсоединенных от краноманипуляторной установки ракетных модулей с ЗУР. Перед погрузкой ракетный модуль с ЗУР разворачивают на грузовой платформе транспортно-заряжающей машины из горизонтального в вертикальное положение при помощи поворотного устройства, установленного на грузовой платформе, прикрепляют развернутый в вертикальное положение ракетный модуль к краноманипуляторной установке и с ее помощью переносят его на боевую машину, опуская вертикально ориентированный ракетный модуль с ЗУР в свободную вертикальную шахту боевой машины, предварительно отсоединив его от краноманипуляторной установки. Достигается снижение трудоемкости, повышение безопасности, быстродействие разгрузки-погрузки ракетных модулей с ЗУР в месте зарядки боевых машин, повышение производительности, увеличение срока службы транспортно-заряжающей машины с краноманипуляторной установкой, а также увеличение грузоподъемности транспортно-заряжающей машины. 2 н. и 3 з.п. ф-лы, 11 ил., 1 табл.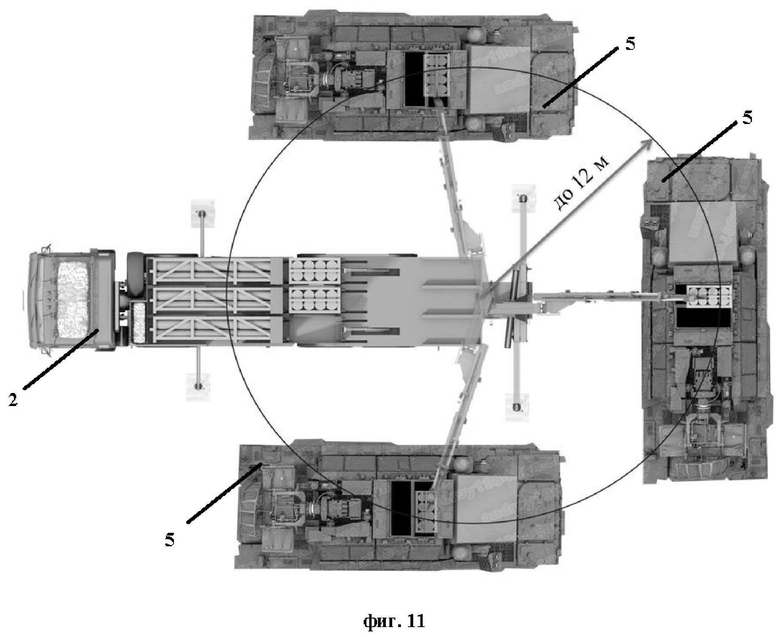
1. Способ доставки ракетных модулей ЗУР, включающий погрузку ракетных модулей ЗУР на транспортно-заряжающую машину, снабженную краноманипуляторной установкой, укладку ракетных модулей ЗУР на грузовую платформу транспортно-заряжающей машины в горизонтальном положении и доставку в район зарядки боевых машин с вертикальными шахтами для ракетных модулей с ЗУР, и погрузку с помощью краноманипуляторной установки в вертикальные шахты боевой машины отсоединенных от краноманипуляторной установки ракетных модулей с ЗУР, отличающийся тем, что перед погрузкой ракетный модуль с ЗУР разворачивают на грузовой платформе транспортно-заряжающей машины из горизонтального в вертикальное положение при помощи поворотного устройства, установленного на грузовой платформе, прикрепляют развернутый в вертикальное положение ракетный модуль к краноманипуляторной установке и с ее помощью переносят его на боевую машину, опуская вертикально ориентированный ракетный модуль с ЗУР в свободную вертикальную шахту боевой машины, предварительно отсоединив его от краноманипуляторной установки.
2. Способ доставки ракетных модулей ЗУР по п.1, отличающийся тем, что перед зарядкой вертикальных шахт боевых машин ракетными модулями ЗУР с помощью краноманипуляторной установки выгружают из шахты боевой машины, первой подошедшей на зарядку, разряженный ракетный модуль, а ракетный модуль с ЗУР из секции поворотного держателя, выполненного на грузовой платформе, прикрепляют к краноманипуляторной установке и с ее помощью перемешают его в освободившуюся вертикальную шахту боевой машины, отсоединяя ракетный модуль от краноманипуляторной установки после его установки на направляющие вертикальной шахты, затем выгружают при помощи освободившейся от ракетного модуля с ЗУР краноманипуляторной установки из вертикальной шахты той же боевой машины следующий разряженный ракетный модуль, прикрепляют его к краноманипуляторной установке и с ее помощью перемещают его в освободившуюся секцию поворотного держателя транспортно-заряжающей машины, после чего прикрепляют к краноманипуляторной установке ракетный модуль с ЗУР и с ее помощью загружают его в последнюю свободную шахту боевой машины, после чего заряженная боевая машина покидает место зарядки, а операции по обмену разряженных модулей из вертикальных шахт боевых машин на ракетные модули с ЗУР производятся со следующей боевой машиной, также начиная с выгрузки разряженного ракетного модуля до заполнения ее вертикальных шахт ракетными модулями с ЗУР, после того, как все ракетные модули с ЗУР выгружены с транспортно-заряжающей машины на боевые машины, краноманипуляторная установка перемещает на свободное место в поворотном держателе на грузовой платформе разряженный ракетный модуль с земли, где он хранился, после чего краноманипуляторная установка и транспортно-заряжающая машина переводятся из рабочего в транспортное положение и транспортно-заряжающая машина отбывает с места зарядки.
3. Транспортно-заряжающая машина с краноманипуляторной установкой для доставки ракетных модулей с ЗУР, содержащая грузовую платформу, краноманипуляторную установку, установленную на грузовой платформе и снабженную выдвижными опорами, отличающаяся тем, что грузовая платформа выполнена из двух частей - неподвижной и выдвижной, на каждой из которых выполнен поворотный держатель ракетных модулей, выполненный с возможностью разворота из горизонтального положения в вертикальное и обратно.
4. Транспортно-заряжающая машина с краноманипуляторной установкой для погрузки-разгрузки ракетных модулей с ЗУР по п.3, отличающаяся тем, что неподвижная часть грузовой платформы представляет собой силовую металлическую конструкцию, которая крепится к лонжеронам шасси, с неподвижной частью грузовой платформы жестко связаны дополнительные передние выдвижные опоры, краноманипуляторная установка шарнирно связана с выдвижной части грузовой платформы, представляющей собой силовую металлическую конструкцию, выполненную с возможностью перемещения по направляющим неподвижной части грузовой платформы, поворотные держатели выполнены с возможностью вращения в противоположные стороны для обеспечения последовательного их размещения в пространстве, образующемся при выдвижении выдвижной части грузовой платформы между ее неподвижной и выдвижной частями.
5. Транспортно-заряжающая машина с краноманипуляторной установкой для доставки ракетных модулей с ЗУР по п.4, отличающаяся тем, что поворотные держатели выполнены секционными каждый с числом секций n, равным: n=N/m, где N - число ракетных модулей с ЗУР, подлежащих доставке за один рейс транспортно-заряжающей машины в район зарядки боевых машин, m - число поворотных держателей на грузовой платформе транспортно-заряжающей машины.
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАЗМИНИРОВАНИЯ И ВЗРЫВОЗАЩИЩЕННЫЙ КОНТЕЙНЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2462376C2 |
| Кран-манипулятор, предназначенный для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии | 2019 |
|
RU2722600C1 |
| US 9919753 B2, 20.03.2018 | |||
| Бесколлекторный статический фазокомпенсатор | 1954 |
|
SU102329A1 |

