Изобретение относится к области подводного кораблестроения, а именно к пусковым установкам, предназначенным для постановки-запуска оружия и объектов различного назначения, и может быть использовано при создании специализированных комплексов морского базирования для постановки-запуска оружия, приборов радиоэлектронной борьбы и т.д. с подводной лодки.
Известна пусковая установка для запуска ракет преимущественно с палубы надводного корабля (RU, патент №2287127, опубл. 10.11.2006 г), включающая размещенный под палубой подъемник пакетов пусковых труб для ракет, башню с узлами наведения ракет, которые содержат как минимум одну силовую стрелу для пакета. Подъемник выполнен в виде заряжающего устройства, включающего барабан с балками для пакетов, оборудованных полозками и штырем, каретку, установленную с возможностью перемещения по балкам и снабженную подпружиненным рычагом с Г-образным выступом для захвата штыря на пакете, промежуточные балки, закрепленные с возможностью стыковки с балками на барабане, и переходные балки, установленные на прикрепленной к палубе раме с возможностью сопряжения одним концом с промежуточными балками, а другим - со стрелами на башне, которые закреплены на оси, связанной с приводом вертикального наведения, при этом башня установлена на палубе с возможностью сообщения с заряжающим устройством через люки в раме. Башня с приводами наведения установлена на палубе, а пакеты с ракетами хранятся под палубой в заряжающем устройстве, которое перемещает только пакеты.
Недостатком является наличие общего барабана с излишней мощностью и энергозатратами, а область использования пусковой установки ограничена надводными носителями.
Известна пусковая установка подводной лодки системы противоторпедной защиты C303/S фирма Whitehead Alenia Sistami Subacqua (Интернет, http://www.whiteheadaleniasistemisubacquei.com, фиг. 1 и 2, Италия,). Пусковая установка представляет собой многоствольный герметичный модуль, размещаемый вне прочного корпуса подводной лодки. Пусковая установка содержит в модуле до 12 стволов, вместе с тем количество стволов в модуле и количество модулей может быть изменено под требования конструкции подводной лодки. Каждый ствол пусковой установки, загруженный соответствующим прибором РЭБ, имеет переднюю крышку, воздушный баллон, электрический клапан, что обеспечивает независимость при стрельбе от других стволов ПУ. ПУ установлены в фиксированном положении и закрыты подвижным элементом легкого корпуса, что не меняет наружный профиль ПЛ. Перед стрельбой ПУ выдвигается из пространства легкого корпуса гидроприводом. Стрельбу осуществляют в попутный поток.
Недостатками являются ограниченные функциональные возможности и низкая надежность, обусловленные невозможностью обслуживания и ремонта приборов РЭБ, загруженных в стволы ПУ. Перезарядку ПУ производят только при нахождении в базе.
Известна пусковая установка подводной лодки (RU, патент №2412855, опубл. 27.02.2011 г.), принятая за прототип и включающая пусковую трубу с верхней и нижней крышками и их приводами, установленную в прочном корпусе, соединенную с системами заполнения, осушения, уравнивания давления и стрельбы. Пусковая установка снабжена устройством перезарядки приборов револьверного типа и направляющей, установленными на прочном корпусе перед нижней крышкой пусковой трубы, а также автоматизированной системой управления. При этом в основании устройства перезарядки приборов выполнен механизм разворота, на котором закреплены ячейки с приборами, а направляющая одним концом сопряжена с пусковой трубой, а на другом ее конце соосно с пусковой трубой установлена каретка подачи приборов. Устройство перезарядки приборов закреплено с возможностью разворота, поочередного совпадения ячеек с направляющей и контакта прибора с кареткой. Т.е. направляющая с кареткой подачи являются средством заряжания, а устройство перезарядки приборов револьверного типа на поворотном основании с ячейками для приборов является средством погрузки приборов и средством хранения одновременно. Пусковая труба снабжена стопором прибора и электроразрывным соединителем, механизмы и исполнительные устройства снабжены сигнализаторами их положения, а системы заполнения, осушения, уравнивания давления и стрельбы снабжены датчиками давления и уровня. Механизм разворота закреплен в основании устройства перезарядки приборов при помощи вертикальной оси вращения и подшипника.
Недостатками являются ограниченные функциональные возможности пусковой установки:
- малое количество приборов в устройстве перезарядки приборов револьверного типа;
- значительное время заряжания устройства перезарядки приборами с дополнительного стеллажа;
- увеличение количества приборов ведет к значительному увеличению массы устройства перезарядки, что требует дальнейшего увеличения мощности механизма разворота;
- механизм разворота излишне мощный, так как для перезарядки одного прибора ему необходимо разворачивать все устройство перезарядки с другими закрепленными в нем приборами;
- высокие нагрузки, приходящиеся на ось вращения барабана при неравномерном расходовании приборов в барабане и особенно в условиях деформаций при обжатии прочного корпуса;
- отсутствие возможности устранения расхождения осей пусковой трубы и средства погрузки и хранения револьверного типа, вызванного обжатием прочного корпуса в условиях деформаций.
Задачей изобретения является разработка пусковой установки с устройством перезарядки с такой конструкцией, которая позволяет устранить указанные недостатки.
Техническим результатом является повышение надежности пусковой установки, повышение скорострельности и расширение ее функциональных возможностей.
Технический результат достигается тем, что в пусковой установке подводной лодки, включающей пусковую трубу, установленную в прочном корпусе, со стопором прибора, с верхней и нижней крышками и их приводами, устройство перезарядки, включающее вертикальную заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по вертикальной заряжающей балке, средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения, средство хранения приборов устройства перезарядки выполнено в виде сборной модульной силовой рамы, включающей вертикальные стойки с вертикально ориентированными съемными ячейками для хранения и перемещения соосно размещаемых в них приборов, расположенными по окружности вокруг вертикальной заряжающей балки, при этом вертикальная заряжающая балка с кареткой подачи прибора выполнена поворотной и установлена с возможностью поворота в горизонтальной плоскости к выбранной съемной ячейке относительно вертикальной оси поворота и снабжена блоком радиальной подачи съемной ячейки, выполненным с возможностью его взаимодействия с выбранной съемной ячейкой силовой рамы и радиального перемещения съемной ячейки перпендикулярно вертикальной поворотной заряжающей балки.
Поворотная вертикальная заряжающая балка с кареткой подачи и блоком радиальной подачи могут быть установлены на несущей поворотной опоре и поворотном основании с приводом, блок радиальной подачи может быть выполнен в виде механизма, включающего выдвижные несущие стрелы, выполненные с возможностью разъемного крепления съемной ячейки или съемной ячейки с прибором, и привода их возвратно-поступательного радиального перемещения перпендикулярно поворотной вертикальной заряжающей балки, а съемные ячейки для хранения приборов могут быть установлены в зоне их взаимодействия с выдвижными несущими стрелами блока радиальной подачи.
Съемная ячейка может быть выполнена с возможностью ее попеременного разъемного крепления на вертикальной стойке силовой рамы и на блоке радиальной подачи заряжающей балки и с возможностью разъемного крепления прибора в ней.
Продольная ось любой вертикально ориентированной съемной ячейки силовой рамы может быть параллельна продольной оси пусковой трубы, оси каретки подачи и вертикальной оси поворота заряжающей балки и расположены в одной вертикальной плоскости с вертикальной осью поворота заряжающей балки.
Устройство перезарядки пусковой установки может быть дополнительно снабжено блоком обеспечения соосности, выполненным в виде двух платформ, верхней и нижней, подвижно соединенных между собой с возможностью их линейного перемещения друг относительно друга, при этом нижняя платформа жестко закреплена на поворотном основании устройства перезарядки, на верхней подвижной платформе установлена несущая поворотная опора с вертикальной заряжающей балкой, шарнирно соединенной с пусковой трубой.
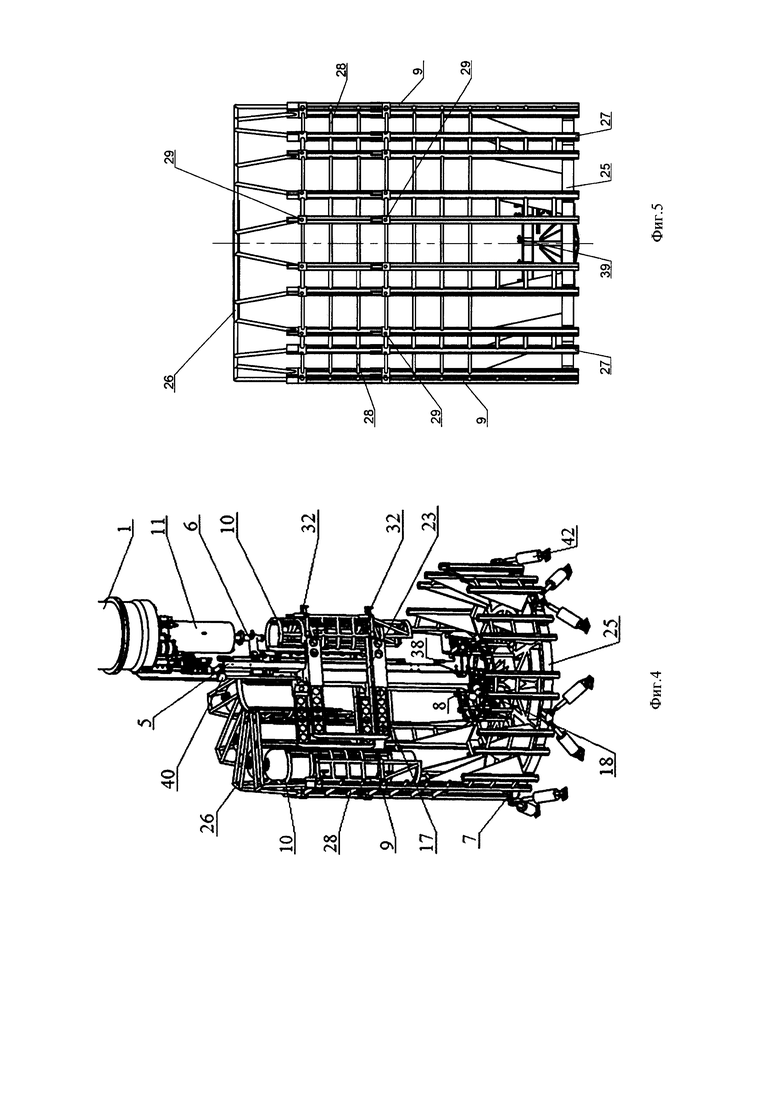
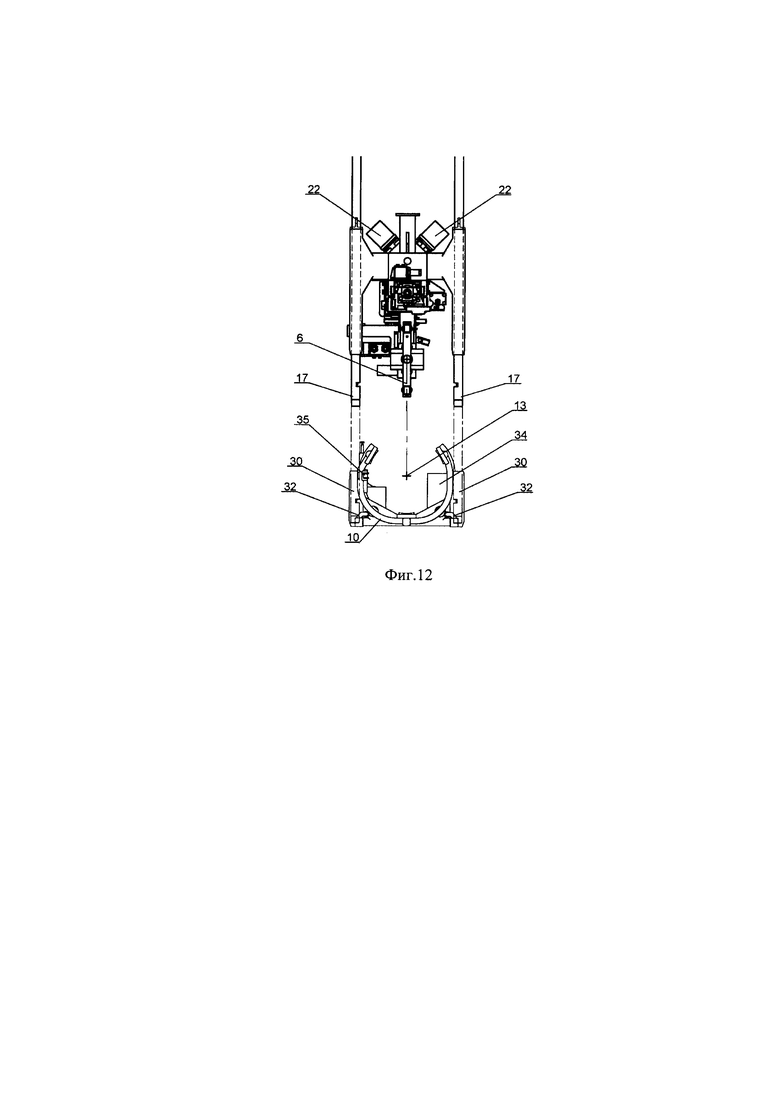
Устройство поясняется чертежами, где на фиг. 1 и фиг. 2 представлены схемы расположения устройства перезарядки с поворотной заряжающей балкой и блоком радиальной подачи в пусковой установке в исходном положении, фронтальный вид и сечение А-А, вид сверху соответственно. На фиг. 3 представлена кинематическая схема установки поворотной заряжающей балки и блока радиальной подачи съемной ячейки. На фиг. 4 представлен общий вид в аксонометрии (часть силовой рамы и съемных ячеек не показаны). На фиг. 5 представлен общий вид в аксонометрии модульной силовой рамы с вертикальными стойками для хранения съемных ячеек по примеру исполнения (часть силовой рамы не показана). На фиг. 6 представлен общий вид в аксонометрии съемной ячейки для хранения и перемещения прибора. На фиг. 7 представлена схема взаимодействия несущих стрел блока подачи и съемной ячейки на вертикальной стойке по примеру исполнения. На фиг. 8 представлена аксонометрия блока обеспечения соосности. На фиг. 9 представлена схема установки блока обеспечения соосности и поворотной опоры с заряжающей балкой в пусковой установке. На фиг. 10 представлен схематично вид сверху устройства перезарядки в положении поворота заряжающей балки с кареткой подачи к выбранной съемной ячейке На фиг. 11 представлена схема работы блока радиальной подачи по примеру исполнения. На фиг. 12 представлен вид сверху на блок радиальной подачи и выбранную съемную ячейку, закрепленную на вертикальной стойке силовой рамы.
Пусковая установка подводной лодки включает (фиг. 1, фиг. 4) пусковую трубу 1, установленную в прочном корпусе 2, снабженную стопором 41 прибора 11, с верхней 3 и нижней 4 крышками и их приводами, устройство перезарядки, автоматизированную систему управления установкой 14, механизмы, снабженные сигнализаторами их положения (не показано). Устройство перезарядки включает средство хранения приборов, выполненное в виде сборной модульной силовой рамы 7 с вертикально ориентированными съемными ячейками 10 для хранения соосно размещаемых в них приборов 11. А также оно включает вертикальную поворотную заряжающую балку 5, установленную в прочном корпусе 2 перед нижней крышкой 4 пусковой трубы 1, с соосной с пусковой трубой 1 каретку подачи 6 прибора 11 с приводом ее возвратно-поступательного линейного движения по заряжающей балке 5. Вертикальная заряжающая балка 5 с кареткой подачи 6 установлена с возможностью поворота в горизонтальной плоскости к выбранной съемной ячейке 10 относительно вертикальной оси поворота 15 и снабжена блоком радиальной подачи 16, выполненным с возможностью его взаимодействия с выбранной съемной ячейкой 10 силовой рамы 7 и радиального перемещения съемной ячейки 10 перпендикулярно вертикальной поворотной заряжающей балки 5. Вертикальные стойки 9 силовой рамы 7 расположены в прочном корпусе 2 по окружности вокруг вертикальной заряжающей балки 5 в зоне взаимодействия съемной ячейки 10 с блоком радиальной подачи 16.
Выполнение средства хранения в виде сборной модульной силовой рамы 7 с вертикально ориентированными съемными ячейками 10 для хранения приборов 11 обеспечивает более высокую плотность размещения и хранения приборов 11 в прочном корпусе 2, чем их хранение в устройстве перезарядки и на дополнительном стеллаже пусковой установки прототипа. Размещение приборов 11 соосно съемной ячейке 10 и расположение их на вертикальных стойках по окружности так же обеспечивает высокую плотность хранения в силовой раме 7. Высокая плотность вертикального размещения и сборная модульная конструкция силовой рамы 7 обеспечивают увеличение количества приборов в устройстве перезарядки, что расширяет функциональные возможности пусковой установки. В отличие от прототипа, сборная модульная силовая рама 7, выполняет функцию хранения всех используемых пусковой установкой вертикально ориентированных приборов 11.
Количество съемных ячеек в силовой раме 7 зависит от диаметра их размещения. При этом, увеличение количества приборов в устройстве перезарядки не ведет к значительному увеличению массы средства хранения устройства перезарядки, и не требует дальнейшего увеличения мощности механизма разворота средства погрузки, как в прототипе.
Сборная модульная силовая рама 7 позволяет устранить раздельное хранение приборов прототипа, а именно, частично в подвижном устройстве перезарядки, частично на дополнительном стеллаже, и тем самым исключить временные затраты на ручную перегрузку приборов из дополнительного стеллажа в устройство перезарядки, уменьшить время загрузки/выгрузки и повысить скорострельность пусковой установки.
Модульность обеспечена наличием однотипных вертикальных несущих стоек для хранения вертикально ориентированных приборов и наличием на них съемных вертикально ориентированных ячеек для хранения и перемещения приборов, количество которых можно изменять в зависимости от требований по размещению приборов на подводной лодке. Модульность силовой рамы 7 обеспечивает быстрый и удобный доступ к каждому прибору 11 в индивидуальных ячейках хранения и быстроту технического обслуживания, диагностики, контроля и ремонта всех используемых приборов, что повышает надежность хранения и надежность пусковой установки в целом.
Наличие в силовой раме 7 съемных ячеек на вертикальных стойках, расположенных по окружности вокруг заряжающей балки 5 обеспечивает возможность полной автоматизации процесса погрузки каждой съемной ячейки 10 с прибором 11 на заряжающую балку 5 индивидуально, что расширяет функциональные возможности пусковой установки.
Вертикальный способ хранения приборов и конструкция сборной модульной силовой рамы с вертикально ориентированными съемными ячейками 10 определяет отличительные конструктивные особенности установки вертикальной заряжающей балки 5 с кареткой подачи 6 прибора 11. Установка поворотной заряжающей балки 5 с кареткой подачи 6 с возможностью поворота в горизонтальной плоскости и наличие блока радиальной подачи 16 съемной ячейки 10 обеспечивают повышение степени автоматизации, скорострельности и надежности пусковой установки.
Установка вертикальных стоек 9 со съемными ячейками 10 по окружности вокруг заряжающей балки 5 определяет возможность поворота заряжающей балки 5 в горизонтальной плоскости относительно вертикальной оси поворота из исходного положения заряжания пусковой трубы 1 к каждой съемной ячейке 10 с прибором 11 и обратно. В исходном положении вертикальной заряжающей балки 5 каретка подачи 6 соосна с пусковой трубой 1, продольная ось 12 пусковой трубы 1, вертикальная ось каретки подачи 6 и вертикальная ось 15 поворота параллельны и расположены в одной исходной вертикальной плоскости. Каждая вертикальная съемная ячейка 10 установлена таким образом, что ее продольная ось 13 и совпадающая с ней ось прибора 11, параллельна вертикальной оси поворота заряжающей балки 5 и расположена с ней в одной вертикальной плоскости. При повороте заряжающей балки 5 в горизонтальной плоскости к выбранной съемной ячейке 10, вертикальную ось каретки подачи 6 позиционируют из исходной вертикальной плоскости в указанную вертикальную плоскость выбранной ячейки. При таком позиционировании возможен перенос съемной ячейки 10 на каретку подачи 6, который осуществляют блоком радиальной подачи 16.
Выполнение заряжающей балки 5 с блоком радиальной подачи 16 с возможностью взаимодействия с выбранной съемной ячейкой силовой рамы 7 и радиального перемещения выбранной съемной ячейки 10 в направлении, перпендикулярном заряжающей балке позволяет после поворота заряжающей балки 5 и блока радиальной подачи 16 к выбранной съемной ячейке 10, открепить выбранную съемную ячейку 10 с прибором 11 от вертикальной стойки 9 хранения силовой рамы 7, переместить выбранную съемную ячейку 10 с прибором 11 на заряжающую балку 5 из любой вертикальной стойки 9, установленной по окружности вокруг заряжающей балки 5 в зоне взаимодействия блока радиальной подачи 16 со съемной ячейкой 10, установить съемную ячейку 10 с прибором 11 на заряжающей балке 5 соосно с кареткой вертикальной подачи 6 и закрепить съемную ячейку 10 на заряжающей балке 5. Блоком радиальной подачи 16 перемещают только одну съемную ячейку 10 с прибором 11.
Взаимодействие блока радиальной подачи 16 с выбранной съемной ячейкой 10 включает отделение блоком радиальной подачи 16 съемной ячейки 10 от вертикальной стойки 9 хранения силовой рамы 7 и закрепление съемной ячейки 10 на блоке радиальной подачи 16, перемещение, а затем закрепление съемной ячейки 10 на заряжающей балке 5 блоком радиальной подачи 16. Для этого съемная ячейка 10 для хранения и перемещения прибора 11 выполнена с возможностью ее попеременного разъемного крепления на вертикальной стойке 9 силовой рамы 7 и на блоке радиальной подачи 16 заряжающей балки 5. Степень свободы поворотной заряжающей балки 5 и блока радиальной подачи 16 обеспечены наличием гидравлических или электрических приводов для каждого вида перемещения.
В отличие от прототипа, кроме функции вертикального заряжания прибора 11 в пусковую трубу 1, поворотная заряжающая балка 5 с кареткой подачи 6, снабженная блоком радиальной подачи 16, теперь дополнительно выполняет функцию перемещения любой выбранной вертикально ориентированной съемной ячейки 10 с прибором из силовой рамы 7 в положение для заряжания в пусковую трубу 1, т.е. выполнять функцию средства погрузки и заряжания. Это позволяет полностью автоматизировать процесс погрузки приборов, осуществить автоматическую перезарядку пусковой установки всеми используемыми приборами и тем самым расширяет функциональные возможности пусковой установки.
Сборная модульная конструкция силовой рамы 7 обеспечивает индивидуальный автоматический доступ для блока радиальной подачи 16 к каждой съемной ячейке 10 с прибором 11, а также размещение всех используемых пусковой установкой приборов 11 в зоне взаимодействия с блоком радиальной подачи 16. Это позволяет заменить трудоемкую ручную операцию погрузки из дополнительного стеллажа прототипа на полную автоматизацию процесса погрузки и повысить степень автоматизации процесса перезарядки пусковой установки, что расширяет функциональные возможности.
Хранение всех используемых приборов в модульной силовой раме 7 устройства перезарядки и повышение степени автоматизации их погрузки обеспечивают повышение скорострельности пусковой установки.
Средство погрузки и заряжания устройства перезарядки в виде поворотной заряжающей балки 5 с кареткой подачи 6 и блоком радиальной подачи 16 позволяет перемещать только одну съемную ячейку 10 с одним прибором, а не весь барабан с приборами, и обеспечивает снижение требования по энергообеспечению, уменьшает энергоемкость и энергетические затраты, и тем самым повышает надежность устройства перезарядки и пусковой установки.
Так как заряжающая балка 5 и блок радиальной подачи 16 манипулируют одним прибором, то вес средства погрузки и заряжания с одним прибором много меньше веса устройства перезарядки барабанного типа с несколькими приборами в прототипе. Это снижает общую нагрузку на ось вращения и привод в устройстве перезарядки и повышает надежность пусковой установки.
Силовая рама 7 при этом установлены стационарно, без оси вращения, с равномерной нагрузкой на прочный корпус 2. Так как нет необходимости поворачивать силовую раму 7 с приборами 11, то и нет затрат энергии на проворот, как у барабана с несколькими приборами прототипа, а также исключены перекосы при частично заполненной приборами силовой раме 7. Хранение приборов 11 в отдельной силовой раме 7 обеспечивает снижение нагрузки на ось вращения 15 поворотного основания 24 заряжающей балки 5 по сравнению с устройством перезарядки прототипа и снижение энергетических затрат на хранение, что повышает надежность устройства перезарядки и пусковой установки.
Аналогично прототипу, вертикальная заряжающая балка 5 снабжена соосной с пусковой трубой 1 кареткой подачи 6 прибора 11 с приводом ее возвратно-поступательного линейного движения по заряжающей балке 5. Кареткой подачи 6 прибора 11 осуществляют взаимодействие с вертикально ориентированным прибором в съемной ячейке 10 силовой рамы 7 после ее перемещения блоком радиальной подачи 16 из силовой рамы 7 на вертикальную заряжающую балку 5. После поворота заряжающей балки 5 с прибором в съемной ячейке 10 в соосное с пусковой трубой 1 положение, кареткой подачи 6 осуществляют заряжание прибора 11 в пусковую трубу 1, аналогично прототипу. Съемная ячейка 10 при этом является направляющей. Каретку подачи 6 прибора 11 перемещают по вертикально ориентированной заряжающей балке 5 с помощью одного привода. Мощность привода каретки рассчитана на один прибор, такая же как в прототипе.
Конструкция устройства перезарядки прототипа не позволяет устранить расхождение осей пусковой трубы и средства погрузки и хранения револьверного типа, вызванного обжатием прочного корпуса 2 подводной лодки. Наличие в устройстве перезарядки поворотной заряжающей балкой 5 для перемещения одного прибора 11 и раздельное хранение приборов позволяют реализовать возможность регулирования соосности осей пусковой трубы 1 и каретки подачи 6 с прибором 11. Для этого устройство перезарядки пусковой установки дополнительно снабжено автоматическим блоком обеспечения соосности, который позволяет при заряжании устранить расхождение осей пусковой трубы 1 и каретки подачи 6 с прибором 11 при обжатии прочного корпуса 2 подводной лодки. Это повышает надежность пусковой установки, т.к. позволяет устранить сбои в работе пусковой установки из-за расхождения указанных осей.
Автоматический блок обеспечения соосности 18 расширяет функциональные возможности пусковой установки. Регулирование соосности пусковой трубы 1 и оси каретки подачи 6 не требует отдельных временных затрат, т.к. проверка и восстановление соосности происходит например, после радиального перемещения съемной ячейки 10 с прибором на заряжающую балку 5, одновременно с движением каретки подачи 6 при заряжании, в связи с чем исключается негативное влияние на скорострельность.
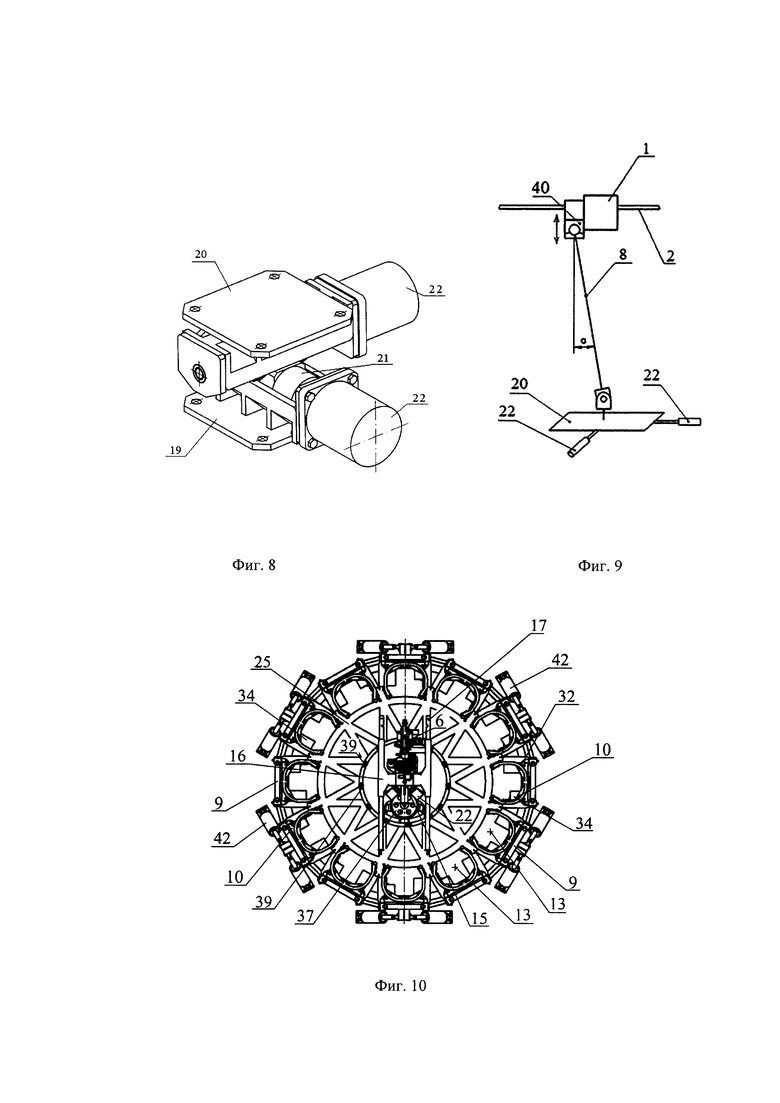
Блок обеспечения соосности 18 выполнен в виде двух платформ, верхней 20 и нижней 19, подвижно соединенных между собой с помощью винтового кардана, выполненного в виде винтовых валов 21 с трапецеидальной резьбой, расположенных крестообразно, с возможностью линейного перемещения платформ друг относительно друга с помощью линейного привода 22 (фиг. 9). Нижняя платформа 19 блока обеспечения соосности 18 жестко закреплена на поворотном основании 24, а на верхней подвижной платформе 20 установлена несущая поворотная опора 8 с заряжающей балкой 5, которая верхним концом шарнирно закреплена на пусковой трубе 1, а нижним концом закреплена к несущей поворотной опоре 8.
Установка верхней платформы 20 относительно нижней платформы 19 с возможностью смещения и шарнирное соединение верхней платформы 20 и заряжающей балки 5 с пусковой трубой 1 обеспечивают изменение угла наклона оси несущей поворотной опоры 8, заряжающей балки 5 и оси каретки подачи 6 с прибором 11 (фиг. 10). При обжатии прочного корпуса 2 подводной лодки может происходить отклонение продольной оси 12 пусковой трубы 1 от вертикали и от оси каретки подачи 6 на некоторый угол. Тогда, смещением линейным приводом верхней подвижной платформы 20 относительно нижней 19, несущую поворотную опору 8 с заряжающей балкой 5 отклоняют на угол расхождения осей пусковой трубы 1 и каретки подачи 6 для восстановления их соосности. Линейный привод 22 может быть выполнен в виде шагового электродвигателя и системы управления в виде следящего двигателя или в виде гидравлического двигателя и системы управления со ступенями регулировки.
Механизмы пусковой установки и устройства перезарядки снабжены сигнализаторами их положения и подключены к автоматизированной системе управления 14 (не показано). Сигнализаторы положения механизмов могут быть выполнены в виде соответствующих датчиков положения, которые связаны с автоматизированной системой управления 14 (не показано). Работой механизмов пусковой установки, в частности, верхней 3, нижней 4 крышек пусковой трубы 1, устройства перезарядки, приводами несущей поворотной опоры 8, заряжающей балки 5, каретки подачи 6 прибора 11, поворотным основанием 24, управляют автоматически с пульта единой автоматизированной системы управления 14 по заранее предусмотренному взаимоувязанному алгоритму.
Пример исполнения устройства перезарядки пусковой установки. Для реализации указанной возможности поворота в горизонтальной плоскости вертикальная заряжающая балка 5 закреплена на несущей поворотной опоре 8, которая установлена на поворотном основании 24 (Фиг. 4). Для реализации возможности взаимодействия блока радиальной подачи 16 со съемной ячейкой 10, блок радиальной подачи 16 выполнен в виде выдвижных несущих стрел 17 с приводом 23 их возвратно-поступательного радиального перемещения перпендикулярно вертикальной заряжающей балки 5. Сборная модульная силовая рама 7 выполнена кольцевой формы, вертикальные стойки 9 со съемными ячейками 10 установлены равномерно по окружности вокруг вертикальной оси поворота
15 заряжающей балки 5 и несущей поворотной опоры 8 в зоне их взаимодействия с выдвижными несущими стрелами 17. В примере приведен механический способ разъемной фиксации съемной ячейки 10 и стопорения поворотного основания 24 при повороте к вертикальной стойке 9.
Кроме несущей функции, силовая рама 7 выполняет защитную функцию, отгораживая механизмы устройства перезарядки пусковой установки от других механизмов заказа. Силовая рама 7 включает основание 25, на котором крепятся вертикальные стойки 9, крышку 26, которая сверху скрепляет между собой вертикальные стойки 9. Силовая рама 7 крепится за свое основание 25 к корпусным конструкциям подводной лодки в прочном корпусе 2. Крепление может быть жестким или с помощью амортизаторов 42. В центре основания 25 силовой рамы 7 на поворотном основании 24 установлена несущая поворотная опора 8. Если устройство перезарядки необходимо амортизировать, к основанию 25 крепятся амортизаторы 42.
Вокруг несущей поворотной опоры 8 с заряжающей балкой 5 равномерно по окружности основания силовой рамы 7 установлены однотипные несущие вертикальные стойки 9 для хранения съемных ячеек 10 с вертикально ориентированными приборами 11. Вертикальные стойки 9 выполняют несущую функцию и служат для разъемного закрепления на них съемных ячеек 10 для хранения приборов 11. Вертикальная стойка 9 выполнена в виде сварной конструкции, состоящей из двух вертикальных опорных балок 27, выполняющих несущую функцию и соединенных между собой горизонтальными балками 28. На двух верхних горизонтальных балках 28 выполнены сквозные отверстия 29 под заходные штыри 33 съемной ячейки 10. В нижней части вертикальные опорные балки 27 закреплены на основании 25 ребрами жесткости.
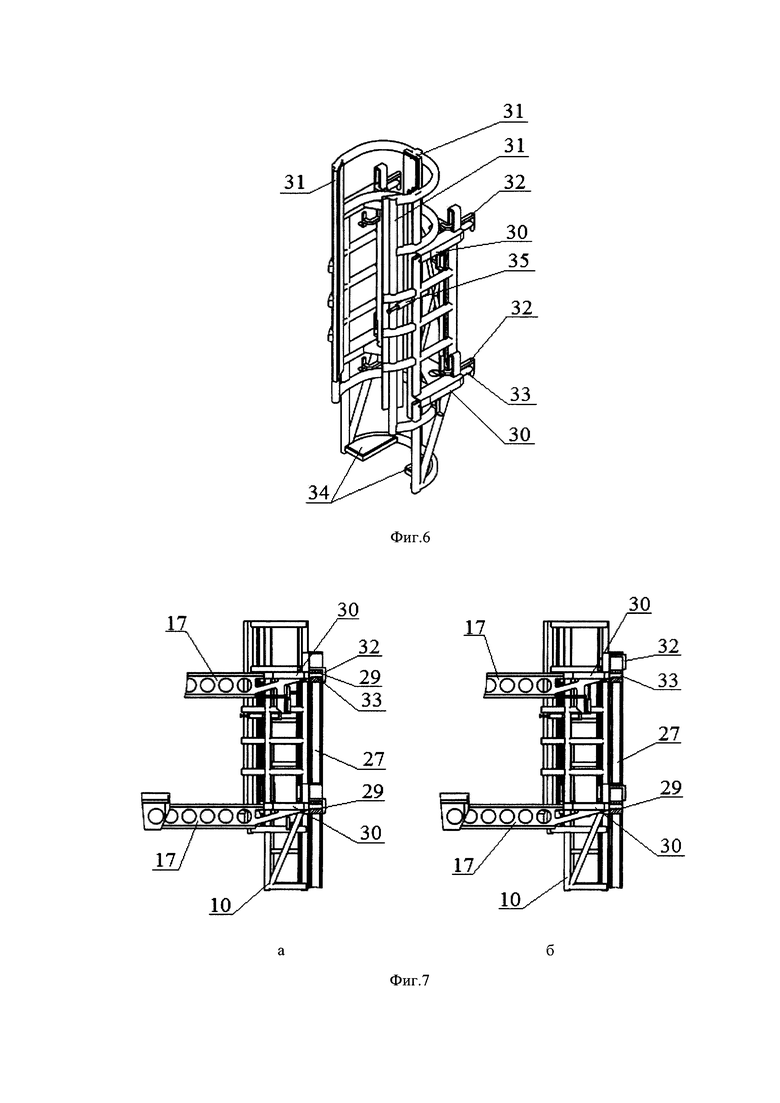
Съемная вертикально ориентированная ячейка 10 для хранения прибора 11 в примере исполнения выполнена в виде сварной решетки из труб, с 4 горизонтальными опорами в виде четырех поперечных балок 30, соединенных ребрами, и с вертикальными направляющими 31 (фиг. 6). Между собой поперечные балки 30 для повышения прочности соединены ребрами. Поперечные балки 30 снабжены заходными штырями 33, которые, заходя в сквозных отверстия 29 на горизонтальных балках 28 вертикальной стойки 9, удерживают съемную ячейку 10 на ней.
Съемная ячейка 10 снабжена фиксирующими элементами для разъемной фиксации на вертикальной стойке 9 и на несущих стрелах 17 блока радиальной подачи 16. Для надежного удержания съемной ячейки 10 на несущих стрелах 17 блока радиальной подачи 16 поперечные балки 30 съемной ячейки 10 выполнены с т-образными пазами с заходными фасками. Для надежного удержания съемной ячейки 10 как на вертикальной стойке 9, так и на несущих стрелах 17, на съемной ячейке 10 закреплен подвижный подпружиненный фиксатор 32, имеющий два положения: съемная ячейка 10 закреплена на вертикальной стойке 9 и съемная ячейка 10 закреплена на несущих стрелах 17 блока радиальной подачи 16. Свое положение фиксатор 32 меняет благодаря пружинам и гидроцилиндру, установленному на несущей стреле 17. Подвижный фиксатор 32 снабжен г-образными штырями, которые в опущенном положении удерживают съемную ячейку 10 на вертикальной стойке 9 совместно с заходными штырями 33 поперечных балок съемной ячейки 10 (фиг. 6, фиг. 7, фиг. 12). Несущие стрелы 17 блока радиальной подачи 16 попадают в т-образные пазы поперечных балок съемной ячейки 10, отжимают подвижный фиксатор 32, фиксирующий съемную ячейку 10 на вертикальной стойке 9, одновременно закрепляя ее на несущих стрелах 17 блока радиальной подачи 16.
Съемная ячейка 10 снабжена фиксирующими элементами для разъемной фиксации прибора 11 в съемной ячейке 10. Для разъемной фиксации прибора 11, съемная ячейка 10 снабжена, тремя вертикальными направляющими 31, стопором 35 прибора 11 и упорами 34 (фиг. 6). В одной из направляющей 31 сделан вертикальный паз под силовую наделку, предотвращающий разворот прибора 11 в съемной ячейке 10. (не показано). Направляющие 31 удерживают прибор 11 от перекоса и направляют прибор 11 при загрузке в пусковую трубу 1 или выгрузке из нее. Для фиксации прибора 11 от вертикальных перемещений, съемная ячейка 10 снабжена подвижным подпружиненным стопором 35 прибора 11, выдвинутый при хранении съемной ячейки 10 с прибором 11 на вертикальной стойке 9 и при транспортировке съемной ячейки 10 с прибором 11. При закреплении съемной ячейки 10 на заряжающей балке 5, от взаимодействия с заряжающей балкой 5 происходит срабатывание подвижного стопора 35 прибора 11 и его открытие. В нижней части съемной ячейки 10 расположены упоры 34, на которые установлен прибор 11. Упоры 34 совместно с подпружиненным стопором 35 надежно удерживают прибор 11 в съемной ячейке 10 от вертикальных перемещений при его хранении и транспортировке на заряжающую балку 5 или на вертикальную стойку 9. Форма упоров 34 обеспечивает доступ к розетке прибора 11 и они снабжены резиновыми подушками, служащие для первичной амортизации прибора 11 при хранении. Расстояние между упорами 34 позволяет каретке вертикальной подачи 6 свободно проходить между ними для загрузки или выгрузки прибора 11.
Несущая поворотная опора 8 в примере исполнения выполнена в виде несущей поворотной балки 36, на которой крепятся заряжающая балка 5 с кареткой подачи 6, блок радиальной подачи 16 и на которую приходится основная нагрузка при загрузке прибора 11 в пусковую трубу 1. Для повышения прочности несущая поворотная балка 36 выполнена, например, в виде коробчатой конструкции, укрепленной ребрами жесткости.
Выдвижные несущие стрелы 17 блока радиальной подачи 16 выполнены в виде двутавровых балок, соединенных стяжками для синхронизации их движения. Выдвижные несущие стрелы 17 перемещают с помощью привода 23 в виде двух гидроцилиндров. Степень свободы по радиальному перемещению позволяет подвести несущие стрелы 17 к съемной ячейке 10, находящейся на вертикальной стойке 9, и увести их обратно к заряжающей балке 5.
Выдвижными несущими стрелами 17 производят раскрепление или закрепление съемных ячеек 10 на вертикальных стойках 9. Для этого на выдвижных несущих стрелах 17 расположены гидроцилиндры, изменяющие положение подвижного фиксатора съемной ячейки 10. В передней части выдвижных несущих стрел 17 выполнены заходные фаски, обеспечивающие попадание выдвижных несущих стрел 17 в т-образные пазы поперечных балок 30 съемной ячейки 10 для удерживания на весу съемной ячейки 10 с прибором 11 или без прибора 11. Выдвижные несущие стрелы 17 служат для перемещения съемной ячейки 10 в радиальном направлении, и закреплению съемной ячейки 10 на заряжающей балке 5. При заряжании, съемную ячейку 10 удерживают на заряжающей балке 5 с помощью выдвижных несущих стрел 17.
На задней части несущей поворотной балки 36 находится площадка, на которой могут быть размещены управляющие элементы устройства перезарядки и блока радиальной подачи 16, в частности, распределители, переключатели и т.д (не показано).
Вертикальная несущая поворотная балка 36 установлена на поворотном основании 24, которое реализует возможность поворота заряжающей балки 5 с кареткой подачи 6 в горизонтальной плоскости. Поворотное основание 24 обеспечивает поворот заряжающей балки 5 с кареткой подачи 6 в горизонтальной плоскости к вертикальным стойкам 9 со съемными ячейками 10, расположенными по окружности вокруг заряжающей балки 5. Поворот поворотного основания 24 обеспечивают, например, приводом поворота 37, выполненным в виде зубчатой рейки, перемещаемой гидроцилиндром, и двух зубчатых колес, одно из которых установлено на поворотном основании 24, а другое на приводе поворота (не показано). Поворот зубчатого колеса привода поворота 37 происходит за счет подачи гидравлики в одну из полостей гидроцилиндра, что приводит в движение зубчатую рейку, которая начинает вращать ось, на которой одето зубчатое колесо привода поворота 37. Зубчатое колесо привода поворота 37 зацеплено с зубчатым колесом поворотного основания 24. При вращении зубчатого колеса привода поворота 37 несущая поворотная опора 8 вместе с заряжающей балкой 5 и кареткой подачи 6 начинают разворачиваться относительно оси поворота 40 на фиксированный угол к выбранной съемной ячейке 10.
Для организации остановки несущей поворотной опоры 8 с заряжающей балкой 5 и блоком радиальной подачи 16 в заданных положениях напротив выбранной съемной ячейки 10 на вертикальной стойке 9 установлена система из (n-2) выдвижных стопоров, где n - количество ячеек. В нижней части вертикальные стойки 9 снабжены выдвижными стопорами, расположенными на основании 25 силовой рамы 7. Исходное положение несущей поворотной балки 36, при котором каретка подачи 6 установлена соосно с пусковой трубой 1, также ограничено выдвижными стопорами. В нижней части несущей поворотной балки 36 на поворотном основании 24 установлен копир 38, который взаимодействует с выдвижным стопором 39 напротив вертикальной стойки 9, на которой расположена выбранная съемная ячейка 10 с прибором 11. Систему механических стопоров 39 возможно заменить системой датчиков положения или программируемой системой управления приводом. В таком случае остановку заряжающей балки 5 производят за счет сигналов системы управления устройства перезарядки.
Кареткой подачи 6 прибора 11 осуществляют зацепление вертикально ориентированного прибора 11 в съемной ячейке 10, удерживающейся выдвижными несущими стрелами 17 на заряжающей балке 5, и перемещение прибора 11 из съемной ячейки 10 в пусковую трубу 1, при этом закрепленная на заряжающей балке 5 съемная ячейка 10 является направляющей для прибора 11. Механизм зацепления прибора 11 кареткой подачи 6 посредством выдвижных упорных штырей из выступов в каретке подачи 6 и соответствующих пазов в хвостовой части прибора 11 (не показано). Выступы каретки подачи 6 попадают в пазы хвостового зацепа прибора 11, выдвигают выдвижные штыри и стопорят их, затем каретка подачи 6 поднимает прибор 11 вверх. В верхней точке хода каретку подачи 6 расцепляют с прибором 11, для его загрузки в пусковую трубу 1.
Верхняя подвижная платформа 20 блока обеспечения соосности 16 и установленные на ней несущая поворотная балка 36 с заряжающей балкой 5 шарнирно соединены со стаканом пусковой трубой 1. Шарнирное соединение может быть выполнено, например, в виде шарнирного подвижного поршня 40, перемещающегося в цилиндре, прикрепленном к вварочному стакану пусковой установки.
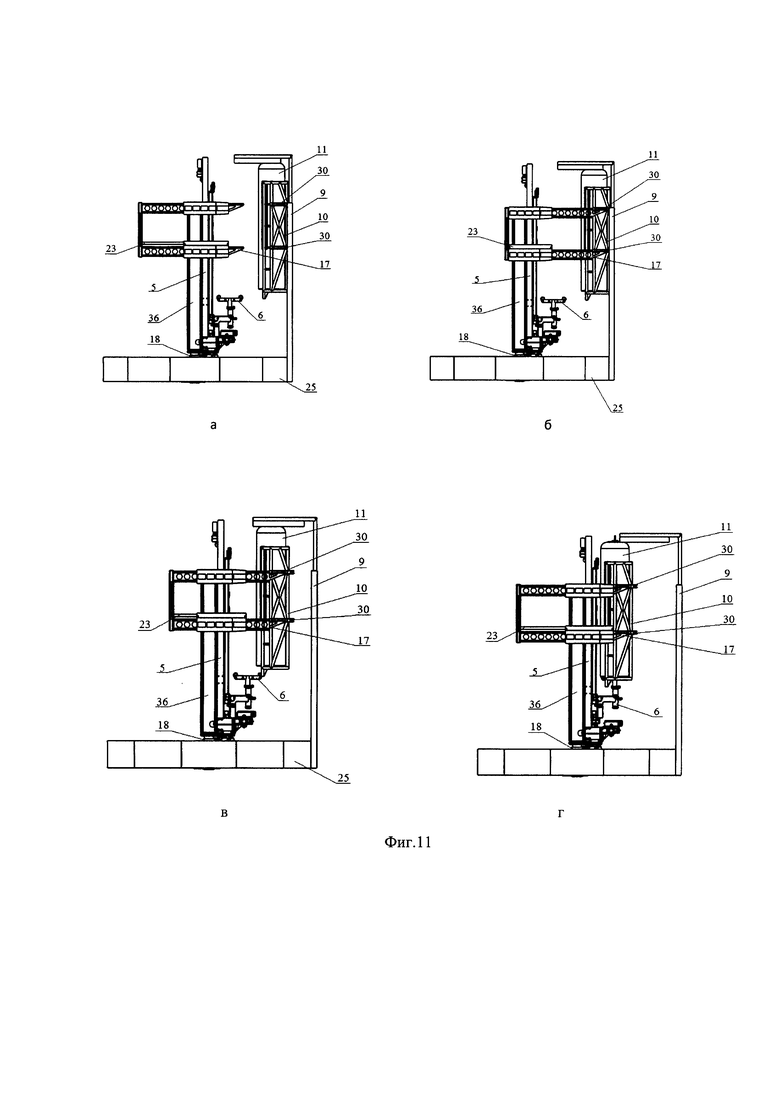
Устройство по примеру исполнения работает следующим образом (фиг. 11). В исходном положении заряжающая балка 5 установлена в вертикальном положении, каретка подачи 6 в нижнем исходном положении соосно с продольной осью 12 пусковой трубы 1, несущие стрелы 17 задвинуты. При этом вертикальная ось каретки подачи 6, продольная ось 12 пусковой трубы 1 и вертикальная ось поворота 15 расположены в одной исходной вертикальной плоскости. Выдвижные стопоры 39 исходного положения копира 38 несущей поворотной балки 36 с двух сторон подняты и удерживают заряжающую балку 5 в исходном неподвижном положении. Соответствующие выдвижные стопоры 39 у каждой вертикальной стойки 9 опущены.
При подготовке к стрельбе в зависимости от типа решаемой задачи автоматизированная система управления 14 выбирает прибор 11 из номенклатуры загруженных в силовую раму 7. После того, как подают сигнал на загрузку прибора 11 в пусковую трубу 1, привод поворота начинает разворот несущей поворотной балки 36 на нужный угол поворота, поворачивая ее к выбранной съемной ячейке 10 с выбранным прибором 11, и останавливаясь с помощью выдвижного стопора или датчика. При этом один из исходных упоров стопоров 39 опускают в выбранную сторону, а у выбранной вертикальной стойки 9 поднимают и обеспечивают остановку заряжающей балки 5 у выбранной вертикальной стойки 9 остановкой копира 38 несущей поворотной балки 36 соответствующим поднятым стопором 39. При этом вертикальные ось каретки подачи 6, ось 13 съемной ячейки 10 и ось поворота 15 позиционируют в одной вертикальной плоскости.
Заряжающую балку 5 с кареткой подачи 6 и выдвижные несущие стрелы 17 поворачивают к выбранной съемной ячейке 10, выдвижные несущие стрелы 17 устанавливают напротив т-образных пазов поперечных балок съемной ячейки 10 (фиг. 11, а). Выдвижные несущие стрелы 17 с помощью гидроцилиндров привода выдвигают к выбранной ячейке 10 с прибором 11, попадая в указанные т-образные пазы. Затем производят раскрепление съемной ячейки 10 с прибором 11 от вертикальной стойки 9 с одновременным закреплением ее на выдвижных несущих стрелах 17. Гидроцилиндрами несущих стрел 17 поднимают стопор фиксатора ячейки 10, что приводит к поднятию г-образных штырей фиксатора 32 съемной ячейки 10, после чего выдвигают заходные штыри 33 из отверстий и снимают ячейку 10 с вертикальной стойки 9 (фиг. 11, б).
После закрепления выбранной съемной ячейки 10 на выдвижных несущих стрелах 17, выдвижные несущие стрелы 17 задвигают, перемещая выбранную съемную ячейку 10 с прибором 11 на заряжающую балку 5 с кареткой подачи 6. Прибор 11 закреплен от любых перемещений относительно съемной ячейки 10 фиксирующими элементами съемной ячейки 10 (фиг. 11, в). После того, как несущие стрелы 17 оказываются полностью задвинуты, открывают стопор 35 прибора 11, фиксирующий его в съемной ячейке 10, каретку вертикальной подачи 6 сцепляют с прибором 11, надежно удерживая его от вертикальных перемещений. Выдвижные несущие стрелы 17 удерживают закрепленную на них съемную ячейку 10 на заряжающей балке 5 (фиг. 11, г). Производят обратный поворот заряжающей балки 5 со съемной ячейкой 10 и прибором 11 в исходное положение под ось 12 пусковой трубы 1, где копир 38 несущей поворотной балки 36 снова фиксируют между исходными упорами стопоров 39.
Загрузку прибора 11 в пусковую трубу 1 осуществляют аналогично загрузки прибора 11 в прототипе с помощью каретки 6 и привода вертикальной подачи. Каретка подачи 6 начинает двигаться вверх, сцепляясь с прибором 11 в начале своего хода и расцепляясь с ним в верхней точке своего хода, после загрузки в пусковую трубу 1. С помощью привода нижней крышки 4 производят открывание нижней крышки 4 пусковой трубы 1, прибор 11 посредством каретки подачи 6 загружают в пусковую трубу 1, при этом съемная ячейка 10 на заряжающей балке 5 служит направляющей. Прибор 11 ставят в пусковой трубе 1 на стопор 30, каретка подачи 6 уходит в исходное положение, нижнюю крышку 4 закрывают посредством ее привода, после чего пусковая установка готова к стрельбе. По команде автоматизированной системы управления 14 осуществляют выстрел прибора 11. Далее, с помощью привода верхней крышки 3, осуществляют ее закрывание. Цикл работы пусковой установки закончен.
За время подготовки пусковой установки и выпуска прибора 11 производят возврат съемной ячейки 10 на вертикальную стойку 9. Для этого производят поворот несущей поворотной балки 36 к выбранной вертикальной стойке 9, на которой размещалась выбранная съемная ячейка 10, выдвижными несущими стрелами 17 перемещают пустую съемную ячейку 10 на вертикальную стойку 9 и закрепляют съемную ячейку 10 на вертикальной стойке 9, опуская стопоры фиксаторов съемной ячейки 10. Далее возвращают несущие стрелы 17 и заряжающую балку 5 в исходное положение либо к следующей выбранной съемной ячейке 10 с прибором 11.
Так же как в прототипе, в пусковой установке сохраняется обратная функция выгрузки приборов из пусковой трубы 1 на вертикальные стойки 9 силовой рамы 7 устройства перезарядки, которая теперь также полностью автоматизирована, т.к. все используемые пусковой установкой приборы расположены в силовой раме 7, а не на дополнительном стеллаже. Для этого несущую поворотную балку с заряжающей балкой 5 поворачивают к выбранной пустой съемной ячейке 10, несущими стрелами 17 расцепляют ее от вертикальной стойки 9 и закрепляют на несущих стрелах 17, закрепляют съемную ячейку 10 на заряжающей балке 5. Каретку подачи 6 сцепляют с прибором 11, установленным на стопоре в пусковой трубе 1, опускают прибор 11 вдоль заряжающей балки в съемную ячейку 10 и закрепляют прибор 11 в съемной ячейке 10. Далее опять поворот к выбранной вертикальной стойке 9, перемещение несущими стрелами 17 съемной ячейки 10 с прибором 11 на вертикальную стойку 9 и закрепление на ней фиксатором съемной ячейки 10. Также при снятии съемной ячейки 10 с заряжающей балки 5 срабатывает стопор прибора 11 в съемной ячейке 10.
Если в момент нахождения прибора 11 в вертикальном положении заряжания от автоматизированной системы управления 14 поступил сигнал о расхождении оси пусковой трубы 1 и оси каретки подачи 6 прибора 11, срабатывает блок обеспечения соосности 18 и соосность указанных осей автоматически восстанавливают приводами 22.
Таким образом, изобретение обеспечивает повышение надежности, повышение скорострельности и расширение функциональных возможностей пусковой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684228C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2681995C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ЗАПУСКА РАКЕТ | 2004 |
|
RU2287127C2 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Автоматизированная система загрузки ракет в самоходную пусковую установку подвижного берегового ракетного комплекса | 2019 |
|
RU2731296C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА, РАМА ОПОРНОГО ОСНОВАНИЯ, УСТАНОВЛЕННЫЕ НА НЕЙ ЦИСТЕРНА, ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО, ПОЖАРНО-СПАСАТЕЛЬНАЯ ЛЕСТНИЦА И СИСТЕМА ЕЕ ВЫДВИГАНИЯ | 2005 |
|
RU2292928C1 |
| Крановая установка | 1990 |
|
SU1791349A1 |

Изобретение относится к пусковым установкам (ПУ) подводных лодок. ПУ подводной лодки включает пусковую трубу в прочном корпусе, со стопором прибора, с верхней и нижней крышками и их приводами, устройство перезарядки, включающее вертикальную заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по вертикальной заряжающей балке, средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения. Средство хранения приборов устройства перезарядки выполнено в виде сборной модульной силовой рамы, включающей вертикальные стойки с вертикально ориентированными съемными ячейками для хранения соосно размещаемых в них приборов, расположенными по окружности вокруг вертикальной заряжающей балки. Вертикальная заряжающая балка с кареткой подачи прибора выполнена поворотной и установлена с возможностью поворота в горизонтальной плоскости к выбранной съемной ячейке и снабжена блоком радиальной подачи съемной ячейки. Техническим результатом изобретения является повышение надежности и скорострельности ПУ и расширение ее функциональных возможностей. 4 з.п. ф-лы, 12 ил.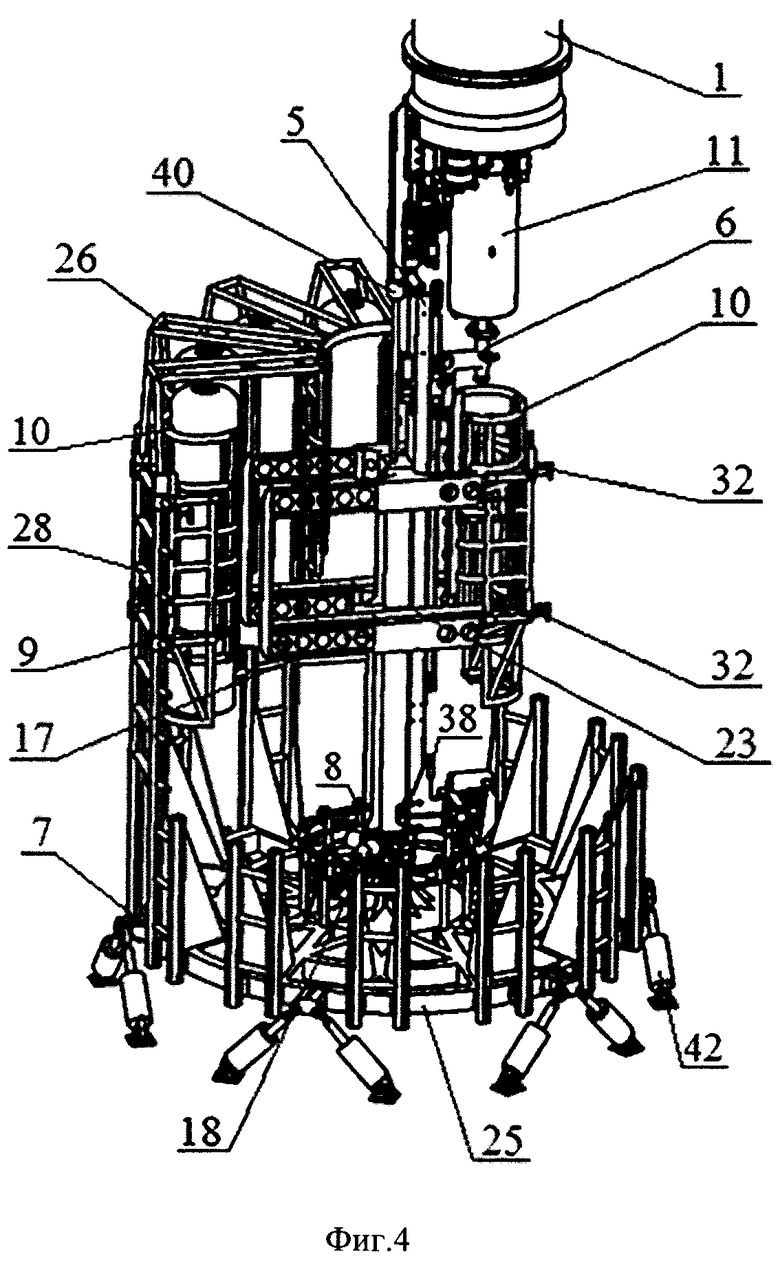
1. Пусковая установка подводной лодки, включающая пусковую трубу, установленную в прочном корпусе, со стопором прибора, с верхней и нижней крышками и их приводами, устройство перезарядки, включающее вертикальную заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по вертикальной заряжающей балке, средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения, отличающаяся тем, что средство хранения приборов устройства перезарядки выполнено в виде сборной модульной силовой рамы, включающей вертикальные стойки с вертикально ориентированными съемными ячейками для хранения соосно размещаемых в них приборов, расположенными по окружности вокруг вертикальной заряжающей балки, при этом вертикальная заряжающая балка с кареткой подачи прибора выполнена поворотной и установлена с возможностью поворота в горизонтальной плоскости к выбранной съемной ячейке относительно вертикальной оси поворота и снабжена блоком радиальной подачи съемной ячейки, выполненным с возможностью его взаимодействия с выбранной съемной ячейкой силовой рамы и радиального перемещения съемной ячейки перпендикулярно вертикальной поворотной заряжающей балки.
2. Пусковая установка по п. 1, отличающаяся тем, что поворотная вертикальная заряжающая балка с кареткой подачи и блоком радиальной подачи установлены на несущей поворотной опоре и поворотном основании с приводом, блок радиальной подачи выполнен в виде механизма, включающего выдвижные несущие стрелы, выполненные с возможностью разъемного крепления съемной ячейки или съемной ячейки с прибором, и привода их возвратно-поступательного радиального перемещения перпендикулярно поворотной вертикальной заряжающей балке, а съемные ячейки для хранения приборов установлены в зоне их взаимодействия с выдвижными несущими стрелами блока радиальной подачи.
3. Пусковая установка по п. 1, отличающаяся тем, что съемная ячейка выполнена с возможностью ее попеременного разъемного крепления на вертикальной стойке силовой рамы и на блоке радиальной подачи заряжающей балки и с возможностью разъемного крепления прибора в ней.
4. Пусковая установка по п. 1, отличающаяся тем, что продольная ось любой вертикально ориентированной съемной ячейки силовой рамы параллельна продольной оси пусковой трубы, оси каретки подачи и вертикальной оси поворота заряжающей балки и расположены в одной вертикальной плоскости с вертикальной осью поворота заряжающей балки.
5. Пусковая установка по п. 2, отличающаяся тем, что устройство перезарядки пусковой установки дополнительно снабжено блоком обеспечения соосности, выполненным в виде двух платформ, верхней и нижней, подвижно соединенных между собой с возможностью их линейного перемещения друг относительно друга, при этом нижняя платформа жестко закреплена на поворотном основании устройства перезарядки, на верхней подвижной платформе установлена несущая поворотная опора с вертикальной заряжающей балкой, шарнирно соединенной с пусковой трубой.
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2009 |
|
RU2412855C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2007 |
|
RU2349492C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2648912C1 |
| US 6834608 B1, 28.12.2004 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2002 |
|
RU2290856C2 |

