Область техники, к которой относится изобретение
Изобретение относится к области медицины, медицинской техники и медико-технических технологий, а именно к устройствам для диагностики, в т.ч. интраоперационной, и хирургических манипуляций, и предназначено для обнаружения и распознавания локальных неоднородностей, отличающихся по оптическим свойствам от окружающих биологических тканей в области исследования. Возможно применение устройства при различных видах оперативного вмешательства или инвазивных манипуляциях, а также при зондировании через интактные кожные покровы. В частности, изобретение может быть использовано в нейрохирургии для обнаружения и распознавания нейроваскулярных структур, магистральных артериальных и венозных сосудов и нервов, в объеме биологической ткани во время проведения операций по удалению опухоли головного мозга, в том числе эндоскопическим трансназальным методом.
Уровень техники
Задача по обнаружению и распознаванию нейроваскулярных структур особенно актуальна в нейрохирургии при выполнении операций по удалению новообразований. Проблематика текущих способов резекции опухолей основания черепа эндоскопическим трансназальным методом заключается в сложности проведения самой операции. Патологическая ткань удаляется эндоскопическим инструментарием через пазухи носа кусочно, по несколько миллиметров. В процессе операции высок риск повреждения нейроваскулярных структур, находящихся в объёме опухолевой ткани. Повреждение черепно-мозгового нерва приводит к утрате функциональных возможностей мышц, связанных с травмированным нервом, утрате важных физиологических функций, существенному ухудшению качества жизни; повреждение артериального сосуда - к мгновенному летальному исходу.
Для минимизации повреждения магистральных артерий в процессе оперативного вмешательства, а также для повышения степени радикальности резекции опухолевой ткани применяют специальные нейрохирургические датчики для интраоперационной ультразвуковой допплерографии (УЗДГ) [Шарипов О. И. и др. Опыт применения интраоперационной ультразвуковой допплерографии в эндоскопической транссфеноидальной хирургии //Журнал "Вопросы нейрохирургии" имени Н.Н. Бурденко. - 2016. - Т. 80. - №. 2. - С. 15-20]. Устройства для УЗДГ, аппараты и датчики УЗДГ, дают информацию о наличии сосуда в объёме биоткани по скорости и направлению кровотока в сосуде. Для сканирования операционного поля применяют комбинированное устройство с подвижной рабочей частью, что позволяет лоцировать сосуды в различных направлениях. Наличие артериального сосуда, глубину его залегания относительно поверхности опухоли оценивают по монитору в окне М-режима (M-Mode). Недостатком такого устройства является сложность применения отдельного датчика УЗДГ в нейрохирургии основания черепа с трансназальным доступом из-за значительных размеров датчика УЗДГ по сравнению с размерами любых применяемых нейрохирургических инструментов для манипуляций и малой областью проведения операции. Датчик УЗДГ не совместим функционально с хирургическим инструментарием. Недостатком датчика УЗДГ также является сложность обнаружения нервных структур в объёме ткани. Устройство для ультразвуковой визуализации нервов и сосудов, представленное в публикации [Smistad E., Johansen K.F., Iversen D.H., Reinertsen I. Highlighting nerves and blood vessels for ultrasound-guided axillary nerve block procedures using neural networks // J. Med. Imag. 2018. V. 5. N 4. P. 044004.], не предназначено для малого операционного поля с ограниченным доступом, например, эндоназальной нейрохирургии. Идентификацию данных структур проводят путём анализа получаемых трудно интерпретируемых изображений.
Для интраоперационной идентификации черепных нервов известно использование устройств триггерной электромиографии (т-ЭМГ, t-EMG) и спонтанной электромиографии (free run ЭМГ, f-EMG) [Parthasarathy D. Thirumala, Santhosh Kumar Mohanraj, Miguel Habeych, Kelley Wichman, Yue Fang Chang, Paul Gardner, Carl Snyderman, Donald J. Crammond, Jeffrey Balzer. Value of Free-Run Electromyographic Monitoring of Extraocular Cranial Nerves during Expanded Endonasal Surgery (EES) of t7he Skull Base. Journal of Neurological Surgery Reports. 2013;74:R1. http://dx.doi.org/10.1055/s-0033-1346975; Шкарубо А. Н. и др. Нейрофизиологическая идентификация черепных нервов в эндоскопической эндоназальной хирургии опухолей основания черепа //Журнал "Вопросы нейрохирургии" имени Н.Н. Бурденко. - 2016. - Т. 80. - №. 3. - С. 35-49.]. Нейрофизиологическая идентификация черепных нервов в несколько раз снижает частоту их поражения, и как следствие, повышает качество жизни пациентов. Однако т-ЭМГ позволяет идентифицировать только двигательные и смешанные нервы. К основным недостаткам устройств т-ЭМГ также относятся широкая зона распространения тока по электропроводящим тканям, что может привести к возбуждению отдаленных нервных структур и к ложному ответу на стимуляцию, и необходимость регистрации отклика дополнительными измерительными средствами вне области локализации нерва. Современной альтернативой электрической стимуляции нервов является оптическая инфракрасная (ИК) стимуляция [Infrared neural stimulation of human spinal nerve roots in vivo / J. M. Cayce, J. D. Wells, J. D. Malphrus et al. // Neurophotonics. 2015. - 2(1). - Р. 015007; Pulsed laser versus electrical energy for peripheral nerve stimulation / J. Wells, P. Konrad, C. Kao et al. // Journal of Neuroscience Methods. 2007. - 163(2). - P. 326-337.], не требующая непосредственного контакта устройства со стимулируемым нервом и оказывающая локальное воздействие. Однако существенным ограничением таких устройств является возможность обнаружения нерва только при его поверхностном залегании и необходимость использования дополнительных средств для регистрации отклика стимулируемого нерва. Технические средства оптической отражательной спектроскопии [Balthasar A., Desjardins A. E., M. van der Voort, et al. Optical Detection of Peripheral Nerves: An in Vivo Human Study // Regional anesthesia and pain medicine, 2012, Vol. 37, No.3, p. 277-82.] позволяют интраоперационно дифференцировать ткани по составу, например по концентрации гемоглобина и липидов, однако не применимы для анализа глубинных слоёв ткани и используются для идентификации только поверхностно расположенных нервов.
Широко применяемые в клинической практике хирургические инструменты для манипуляций с биологическими тканями, удаления опухоли, в том числе трансназальным доступом, не позволяют осуществлять интраоперационную диагностику биотканей, обнаружение и распознавание локальных неоднородностей в объёме биологической ткани, например, нейроваскулярных структур [Семёнов Г.М. Современные хирургические инструменты. [Электронный ресурс], дата обращения 05.05.2021 https://www.litres.ru/gennadiy-semenov/sovremennye-hirurgicheskie-instrumenty/chitat-onlayn/]. Практичными и функциональными являются устройства, совмещающие функции хирургического инструментария и диагностических устройств.
Аналогом заявляемого устройства является зажимное устройство на основе двух подвижных браншей для обнаружения нерва в исследуемом между браншами объёме ткани оптическим методом при просвечивании в широкой полосе 350-550 нм, или на отдельных частотах, например, 405 нм или 488 нм или в отражённом от зажатой ткани излучении [WO 2018/229771 A1]. Источник излучения в этом устройстве располагается, как минимум, на одной бранше, и приёмник излучения, как минимум, на одной из бранш. При установленном отсутствии нерва зажатый объём ткани выкусывается тем же устройством. Ткань не выкусывается при обнаруженном в ней нерве. Возможны варианты применения разных источников излучения: светодиодов, лазеров, источников белого света, - и разных приёмников - от фотодиодов до ПЗС-матриц. Существует реализация устройства с возможностью стыковки его с эндоскопом и/или лапароскопом. Возможно как механическое рассечение и удаление ткани, так и рассечение с применением ультразвуковой или электрической энергии. Главным недостатком указанного устройства является отсутствие возможности обнаружения кровеносного сосуда - артериального или венозного, в зажатом между браншами объёме биологической ткани и его идентификации.
Наиболее близким к заявляемому решению является оптико-хирургическое устройство, подробное описание которого приведено в [US Patent No. 9,925,008 B2]. Это устройство относится к хирургическим щипцам, имеющим компоненты для лечения и/или мониторинга ткани, подлежащей лечению. В частности, это хирургические щипцы для открытых и эндоскопических операций на основе световой энергии для соединения (спаивания, коагуляции) и разъединения тканей (резки, выкусывания) и/ или для диагностики свойств ткани. В данном эндоскопическом хирургическом устройстве для хирургических манипуляций соединения и разъединения применяют энергию лазерного излучения на длинах волн, сильно поглощаемых биологическими тканями. Диагностику биологических тканей также выполняют на основе излучения длин волн, слабо поглощаемых биологическими тканями, например, в ближней ИК области. Диапазон применяемых длин волн - от 200 нм до 1100 нм. Устройство состоит из корпуса и концевого узла на основе двух браншей, функционально соединённых с корпусом. Каждая бранша имеет поверхность, контактирующую с тканью. Перемещением, как минимум одной бранши, обеспечивают их разнесённое или сомкнутое положения. Во втором положении бранши образую полость внутри между ними для забора и удержания ткани, например при разъединении (резке) последней. Устройство решает проблему уменьшения количества одномоментно используемых инструментов/устройств в операционном поле, позволяет обходиться без дополнительных инструментов. Возможны варианты реализации устройства с питанием от батареи, регуляторами для включения/выключения подачи энергии лазера необходимой длины волны, со стопором или кремальерой, с рычагами как у ножниц для манипуляций браншами. Возможны разные варианты подвода излучения к ткани, оптоволоконный, с отражающими или преломляющими элементами, разные варианты конструкции браншей для диагностики состояния и состава находящейся между ними биологической ткани. Возможны варианты устройства с разными излучателями: источниками белого света, лазерами, лазерными диодами, - с линзами или оптоволокнами для подвода излучения к ткани, с разными длинами волн, с разными режимами включения (одномоментно или попеременно), разного количества, разного расположения в браншах. Возможны варианты устройства с разными приёмниками: от линз, оптоволокон до фотодетекторов (фотодиодов, ПЗС-матриц и т.д.), - в разном количестве и расположении для измерения оптических свойств тканей. Возможны варианты приёмников для радиочастотных измерений. Варианты устройства-прототипа включают широкое разнообразие спектроскопических измерений, в том числе Рамановскую спектроскопию для оценки качества сшивания и идентификации специфических типов ткани и их состава (коллаген, белки, вода и т.д.), измерение оптических свойств, таких как отражение и пропускание, оптическую когерентную томографию для визуализации тканей. Диагностика включает определение состава биологической ткани (водонасыщения, кровенаполнения, патологических изменений и т.д.), при этом возможен выбор режима облучения, уровня энергии для достижения требуемого хирургического (терапевтического) эффекта. Для прототипа возможен оптический контроль расстояния между браншами для обеспечения определённой толщины захватываемой для манипуляций ткани, чтобы толщина была больше глубины проникновения оптического излучения в ткань, и излучение полностью поглощалось. Возможны конструктивные решения для определения спектральных характеристик ткани на просвет, на отражение, в разных положениях, на разных длинах волн, для измерения температуры вдоль образца ткани между браншами, для определения положения устройства относительно биологической ткани по отражённому от ткани сигналу, конструктивные решения с реализацией оптической связи между браншами, для послеоперационной визуализации тканей и анализа состояния ткани до и/или после хирургических манипуляций. Управление устройством осуществляется вручную с формированием управляющих сигналов, подаваемых на контроллер, синхронизирующий работу всех источников и приёмников. Возможен вариант реализации устройства, в котором численные значения важных параметров, например толщины захватываемой ткани, отображаются на экране в виде численных значений, и/или при отклонении параметров от допустимых значений подаётся звуковой сигнал.
Основными недостатками данного устройства являются следующие:
- малый диагностируемый объём биологической ткани, зажимаемой между браншами, и малая глубина исследования (не более 3 мм при вариантах устройства, совместимых с трансназальным доступом); кроме того, для оптической когерентной томографии, применяемой для визуализации тканей, также доступны малые объёмы ткани;
- отсутствие возможности увеличивать глубину зондирования биологической ткани и заблаговременно (до непосредственных хирургических манипуляций) получать информацию о нейроваскулярных структурах, глубже расположенных и повреждение которых крайне нежелательно в процессе операции;
- плохо контролируемое или неконтролируемое усилие сжатия браншей, что опасно возможным спазмированием магистральных артерий, что особенно критично для тканей мозга в нейрохирургии;
- отсутствие возможности реализации спектроскопии с временным разрешением на малых объёмах ткани между браншами, а, следовательно, невозможность получения количественных оценок таких оптических параметров, как коэффициенты поглощения и транспортного рассеяния на разных длинах волн, и проведения количественного анализа состава и структуры исследуемого объёма биологической ткани с необходимой точностью и необходимым пространственным разрешением;
- отсутствие количественных оценок динамики кровотока в сосудах разного калибра, от микроциркуляторных до магистральных, в исследуемом объёме ткани.
Кроме того, как следует из литературных данных и описания наиболее близкого решения к заявляемому устройству (прототипа), исчерпывающую информацию о составе и структуре биологической ткани дают спектроскопические методы, как широкополосные, так и в узком спектральном диапазоне, и на отдельных длинах волн. Проблемная ситуация возникает, когда необходимо обеспечить малые габариты диагностического устройства с характерным поперечным размером не более 6 мм, например, для трансназального доступа, и проводить диагностику до максимально возможной глубины от поверхности исследуемого объема ткани, обеспечив при этом необходимое пространственное разрешение/ чувствительность для обнаружения и распознавания нейроваскулярных включений в объёме ткани. Согласованные (оптимальные) значения указанных параметров (размеров устройства, глубины зондирования и чувствительности/разрешающей способности) определяются размерами и глубиной залегания нейроваскулярных структур, оптическими свойствами нервов, артериальных и венозных сосудов и окружающих тканей, взаимным расположением указанных структур в исследуемом объёме ткани.
Устройства для диагностики зажимаемого между браншами объёма ткани (с его последующим выкусыванием /рассечением в случае отсутствия жизненно важных структур, нервов и сосудов) предназначены для дифференциального анализа отдельных типов тканей по относительным оптическим, спектральным характеристикам на разных длинах волн, интегрально определяемых по всей толщине зажатого объёма ткани, характеристикам изображений при визуализации и т.п. Данные устройства не обеспечивают желаемой максимальной глубины зондирования не менее 5 мм, забирая в складку между браншами только деформируемые поверхностные слои ткани. Кроме того, данные устройства будут захватывать разный объём ткани между браншами при значимо отличающихся вязкоупругих свойствах исследуемой ткани, что будет приводить к ошибкам диагностики, и при относительно твёрдых/плотных тканях к невозможности глубинного зондирования или невозможности диагностики вообще. Решение, представленное в US Patent No. 9,925,008 обеспечивает контролируемый захватываемый объём ткани, но не обеспечивает контроля усилия сдавливания объёма ткани между браншами, что может существенно искажать результат диагностики, например, при наличии венозного сосуда, при рыхлой, легко сминаемой ткани опухоли или наоборот при плотной твёрдой ткани.
Технической проблемой является разработка устройства без перечисленных выше недостатков и предназначенного для обнаружения и распознавания нейроваскулярных структур в объёме биологической ткани, в т.ч. для интраоперационного, а также для проведения хирургических манипуляций.
Раскрытие изобретения
Технический результат изобретения заключается в обеспечении возможности зондирования биологической ткани на максимальную глубину не менее 5 мм с идентификацией нейроваскулярных структур - получением достоверных данных о наличии нервов, крупных и малых артерий и вен в объеме биологической ткани, и возможности изменения глубины зондирования в процессе диагностики при малых габаритах оптико-хирургического устройства.
Кроме того, изобретение в одном из вариантов его реализации позволяет контролировать силу прижатия браншей к исследуемому объёму биологической ткани, что позволяет оценивать вязкоупругие свойства ткани и особенности колебаний кровотока в исследуемом объёме, устранять двигательные артефакты в информативных оптических сигналах. Это позволяет проводить идентификацию нейроваскулярных структур в объёме разных тканей без снижения эффективности распознавания, что обеспечивает надёжный контролируемый контакт устройства с исследуемой биологической тканью в процессе диагностики.
Заявляемое устройство является универсальным, может иметь различный типо-размерный ряд, различные конструктивные варианты исполнения от ручного до автоматизарованного, быть применено как для нейрохирургических операций открытого типа, так и закрытого доступа или эндоскопического, в том числе трансназального, а также для других видов оперативного вмешательства, в пластической и реконструктивной хирургии и, кроме того, для определения и распознавания нейроваскулярных структур через интактные кожные покровы, например при венепункции или лоцировании периферических нервов, а также для обнаружения и распознавания локальных неоднородностей, отличающихся по оптическим свойствам от окружающих биологических тканей в области исследования, например, патологических тканей, а также может иметь различные управления: с ручным, автоматизированным, автоматическим, - и с различными вариантами систем автоматизированного или автоматического управления.
Технический результат достигается оптико-хирургическим устройством для обнаружения и распознавания нейроваскулярных структур в объёме биологической ткани, включающим корпус с закрепленными в нем, по меньшей мере, одной подвижной и одной неподвижной браншами, или, по меньшей мере, двумя подвижными браншами, блок разведения браншей, оптический или оптоволоконный блок, включающий, по меньшей мере, одно оптоволокно для подвода оптического сигнала для зондирования биологической ткани - источник излучения, и, по меньшей мере, одно оптоволоконно или жгут для приема обратного сигнала - приемник излучения, выполненные с возможностью спектроскопии биологической ткани, при этом источник и приемник излучения расположены в браншах, согласно изобретению, оптоволоконный блок и бранши выполнены с возможностью подповерхностного контактного зондирования биологической ткани оптическим излучением, по меньшей мере, двух длин волн (λi, i=1..K, K≥2) из диапазона 650 - 950 нм, методом отражательной диффузионной спектроскопии с временным разрешением на максимальную глубину не менее 5 мм, при этом бранши со стороны рабочих торцов выполнены со скосами по направлению к продольной оси устройства;
источники излучения размещены на рабочем торце по меньшей мере на одной из бранш, а приемники - на рабочем торце по меньшей мере на одной из оставшихся бранш;
источники сгруппированы по меньшей мере в две группы, расположенные вдоль отдельных несовпадающих полуосей, направленных от приемника; каждая группа источников состоит, по меньшей мере, из двух подгрупп, каждая из которых предназначена для подачи сигнала, по меньшей мере, на двух длинах волн (λi, i=1..K, K≥2) из указанного диапазона, источники каждой подгруппы расположены друг от друга на расстоянии не более 1 мм, а каждая подгруппа - на определённом расстоянии (rj, j=1..M, M≥2) от приёмника вдоль соответствующей полуоси, где K - количество длин волн источников в каждой подгруппе, M - количество разных расстояний от подгрупп источников до соответствующего приёмника для каждой отдельно выделяемой группы источников группы; в рабочем состоянии для зондирования билогической ткани при разведенных браншах расстояние от каждой подгруппы источников до соответствующего приемника составляет не менее 5 мм.
Скосы со стороны рабочих торцов браншей по направлению к продольной оси устройства могут быть выполнены под углом α к перпендикуляру, проведенному к продольной оси устройства при сомкнутых браншах, величиной не менее половины среднего угла раскрытия браншей в рабочем состоянии при зондировании биологической ткани и не более половины максимально возможного угла раскрытия браншей.
Устройство может дополнительно содержать блок контроля силы прижатия браншей к исследуемой биологической ткани, включающий датчик силы, встроенный в корпус, блок стыковки с внешними устройствами позиционного и/или силового контроля.
Кроме того, устройство может быть выполнено с возможностью подповерхностного контактного электроимпедансного зондирования биологической ткани, и снабжено электродами, выведенными на рабочие торцы браншей с обеспечением возможности осуществления биполярного или тетраполярного режимов, по меньшей мере, одним каналом и, по меньшей мере, на одной частоте из диапазона от 300 Гц до 200 кГц или до 1 МГц, силой тока не более 0,3 мА и плотностью тока, не вызывающей возбуждения нервных и мышечных волокон.
Корпус предпочтительно содержит наружную и внутреннюю направляющие (элементы), с возможностью их регулируемого соосного перемещения друг относительно друга.
Блок разведения браншей в одном из вариантов осуществления изобретения включает подвижный рычаг, подвижно соединенный с корпусом, неподвижную рукоятку корпуса, тяги, жестко соединяющие бранши с подвижным рычагом, и кремальеру, выполненную с возможностью фиксации угла разведения браншей. Подвижный рычаг может быть соединен либо с внутренней, либо с наружной направляющей посредством ушка, жестко прикрепленного к соответствующей направляющей, и цилиндрического штифта.
Внутренняя направляющая корпуса может быть выполнена с продольной внутренней полостью для расположения в ней оптоволокон и оптического(ких) жгута(ов) и тяг от браншей к подвижному рычагу.
Устройство выполнено с возможностью раскрытия браншей на определенный угол и фиксации браншей в данном положении.
Для проведения хирургических манипуляций с биологическими тканями бранши имеют режущие кромки и желобки.
Предпочтительно устройство имеет блочно-модульную конструкцию, в частности, выполнено с возможностью оперативной замены браншей с внутренней направляющей, подвижным рычагом и кремальерой.
Заявляемое устройство обеспечивает оптимальные значения по глубине зондирования и пространственному разрешению, которая в разных реализациях составляет от 2 миллиметров до нескольких сантиметров, по чувствительности за счет возможности реализации спектроскопического метода подповерхностного зондирования с временным разрешением, позволяющего выполнить разделение эффектов поглощения и рассеяния, а, следовательно, провести более тонкий анализ состава и структуры исследуемого объёма биологической ткани с возможностью увеличения глубины зондирования, позволяя заблаговременно/заранее определить наличие артерии и/или нервного ствола определённого калибра.
Отличительной особенностью спектроскопии с временным разрешением является модель «полубесконечного» зондируемого объёма ткани, необходимого и достаточного для формирования так называемых волн фотонной плотности, с возможностью регистрации рассеянного в обратном направлении излучения. Заявляемое устройство обеспечивает реализацию данного требования посредством расположения излучателей и приёмников на торцах устройства, направление облучения вглубь ткани и минимально допустимое расстояние между подгруппами источников и приёмником не менее 5 мм. Заявляемое устройство с большей глубиной зондирования возможно совмещать с диагностикой объёма между браншами в момент выкусывания/рассечения.
Заявляемое устройство обеспечивает максимальную глубину зондирования не менее 5 мм при малых габаритах устройства, например, с поперечным размером браншей и частью корпуса, размещаемых внутри биологического объекта или в опреационном поле, не более 6 мм, пригодных для трансназального доступа в нейрохирургии; достоверную идентификацию нейроваскулярных структур в исследуемом объёме ткани; переменную глубину зондирования и пространственного разрешения/чувствительности, например, к нейроваскулярным структурам в объёме ткани. Все перечисленные преимущества реализуются оптико-хирургическим устройством за счёт контролируемого угла раскрытия браншей и различных вариантов расположения нескольких подгрупп источников, не менее двух в каждой из, как минимум, двух групп, и, как минимум, одного приёмника для реализации многодистантного подхода спектроскопии с временным разрешением, что обеспечивает требуемые глубину, объём и пространственное разрешение.
Краткое описание чертежей
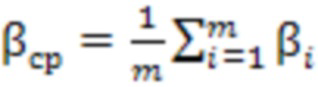
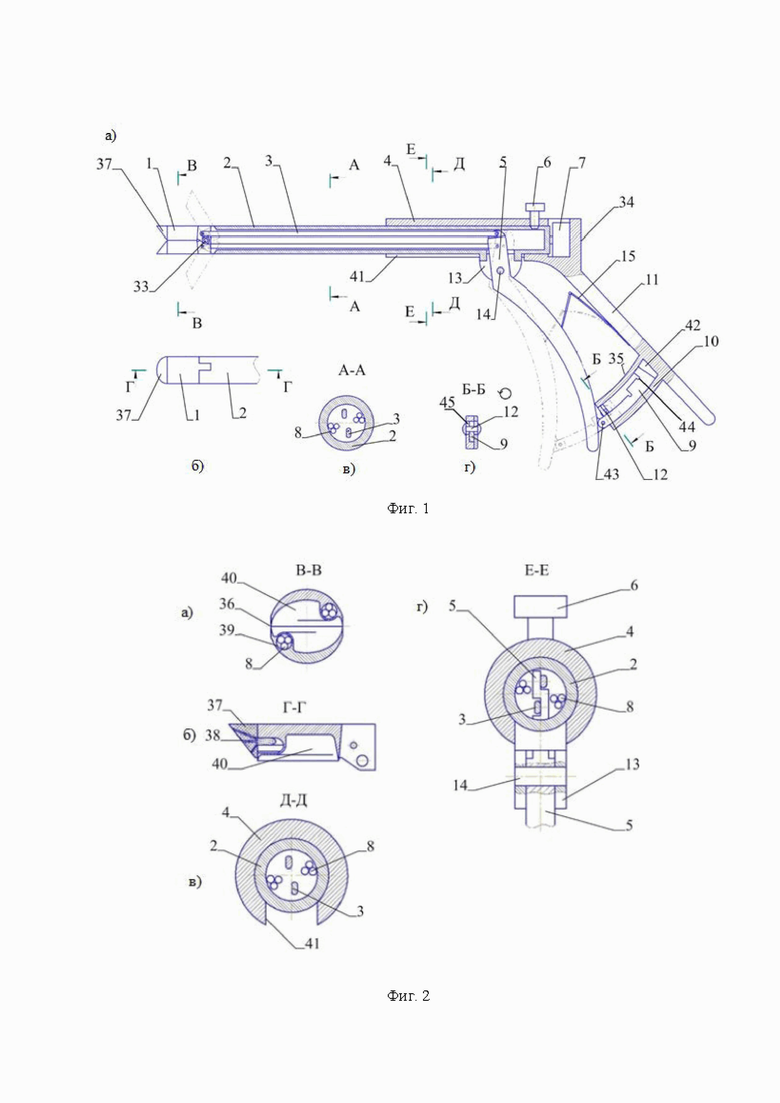
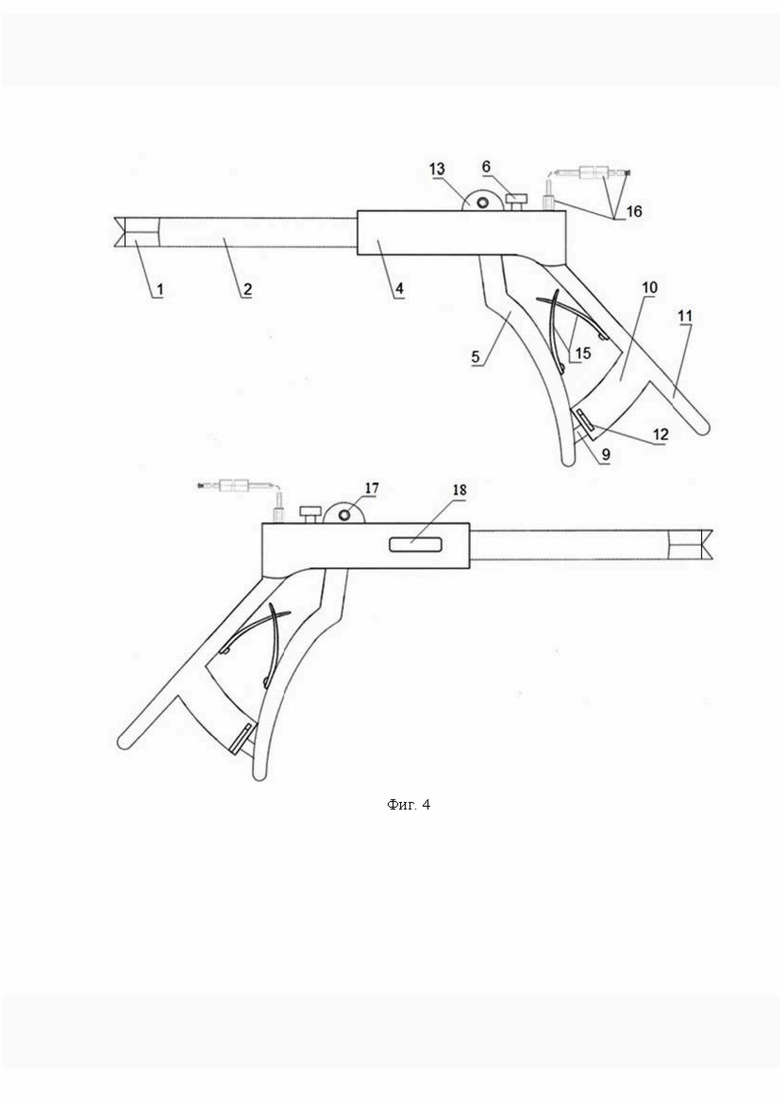
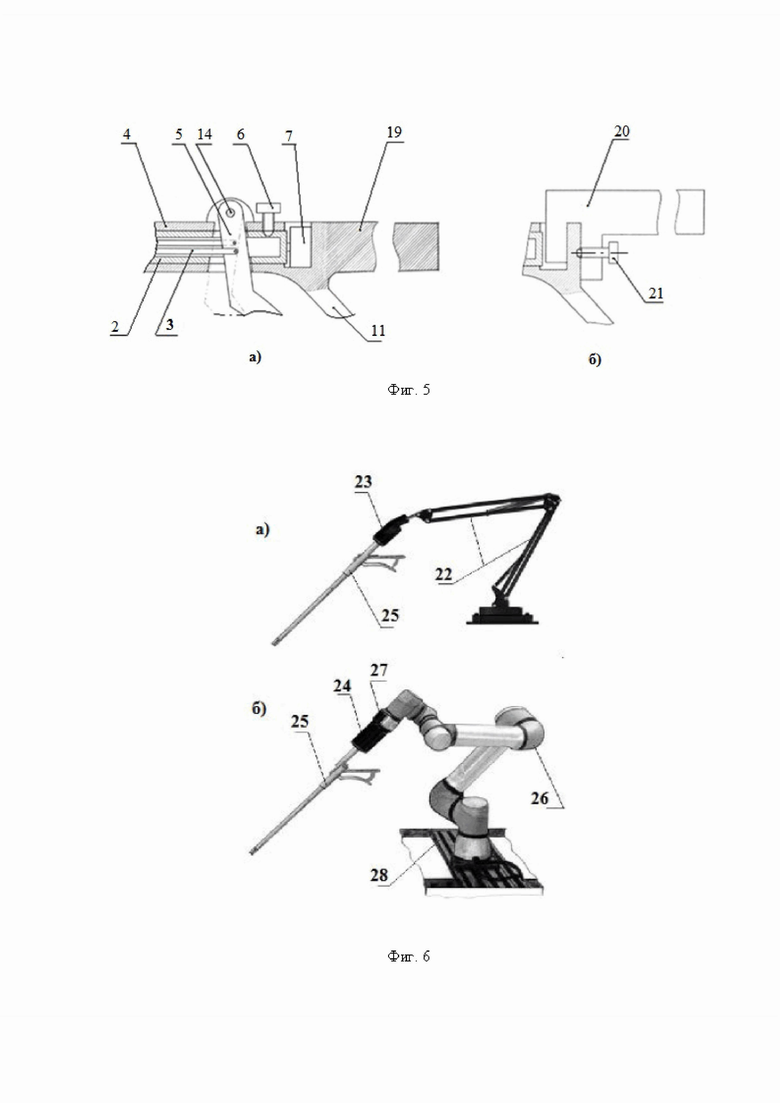
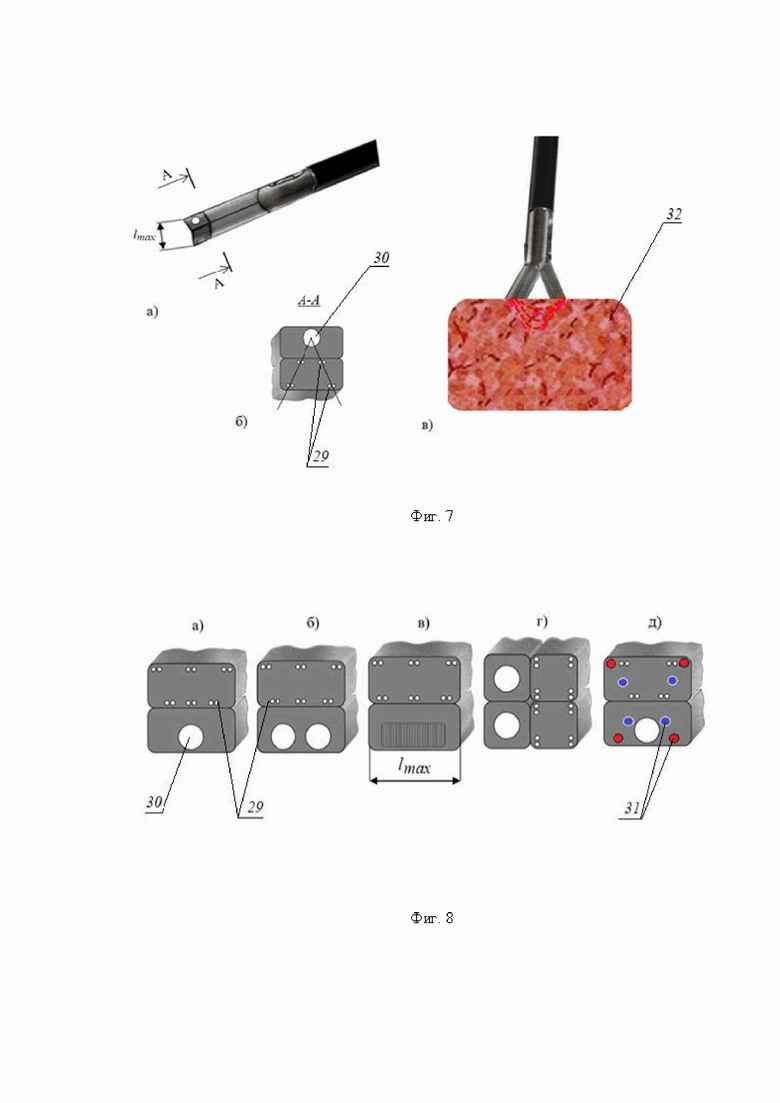
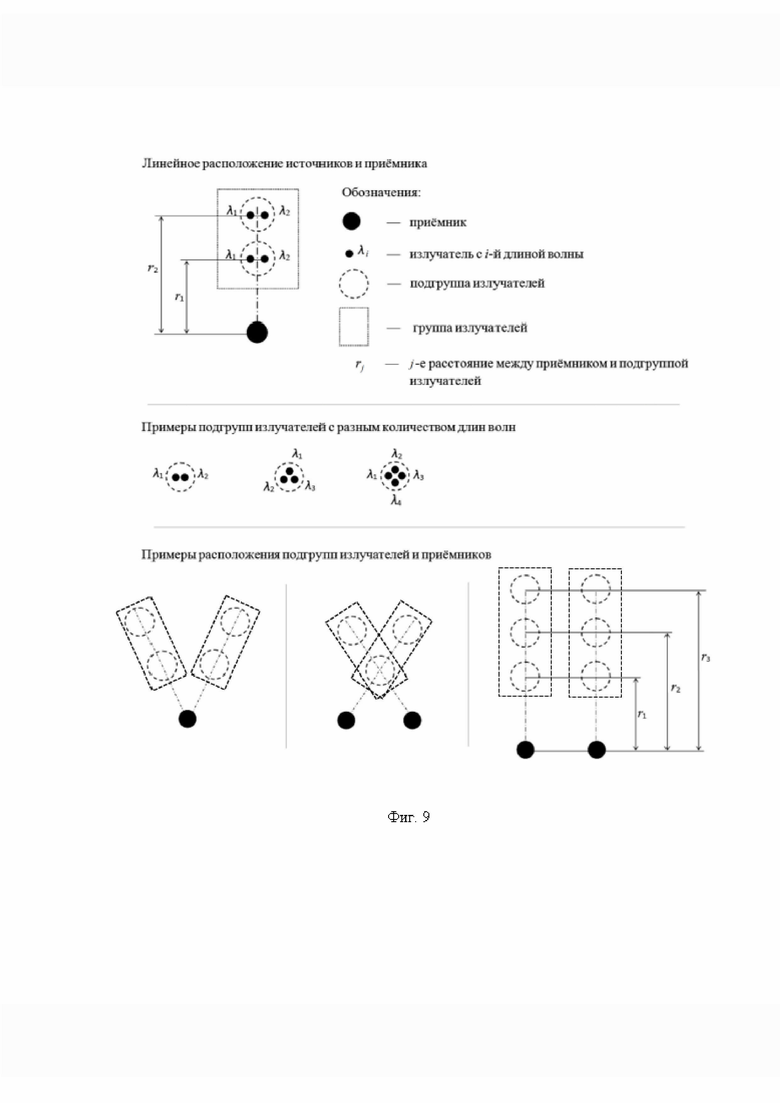
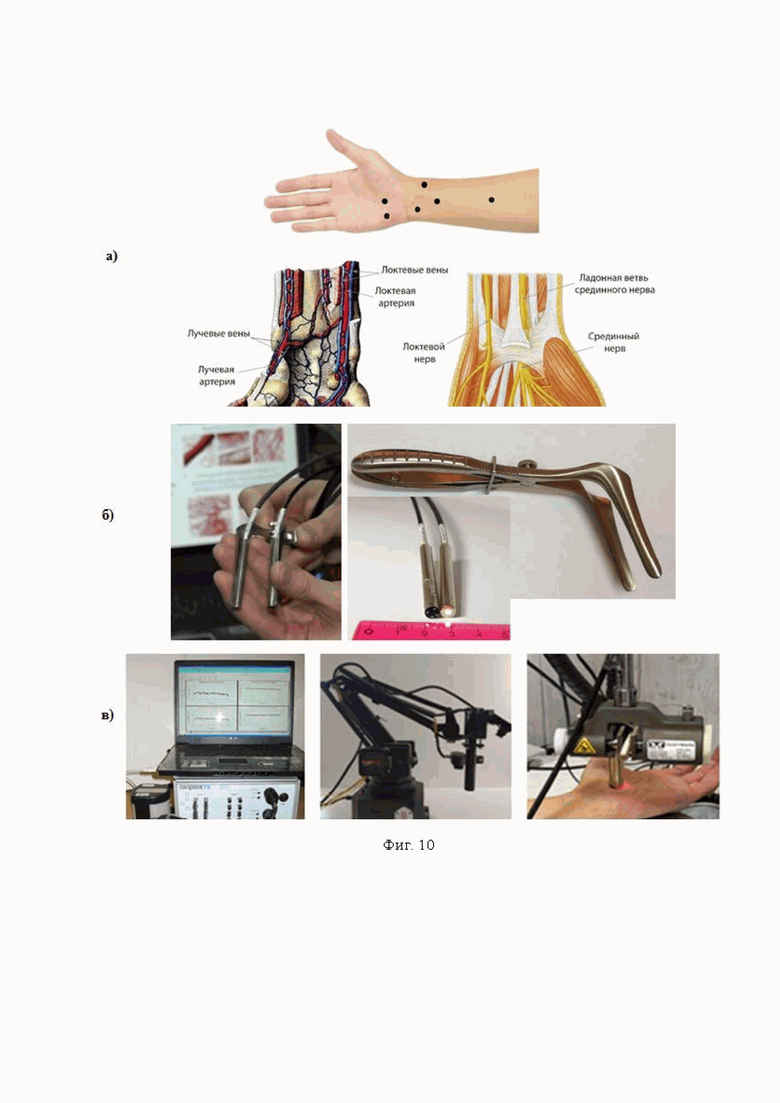
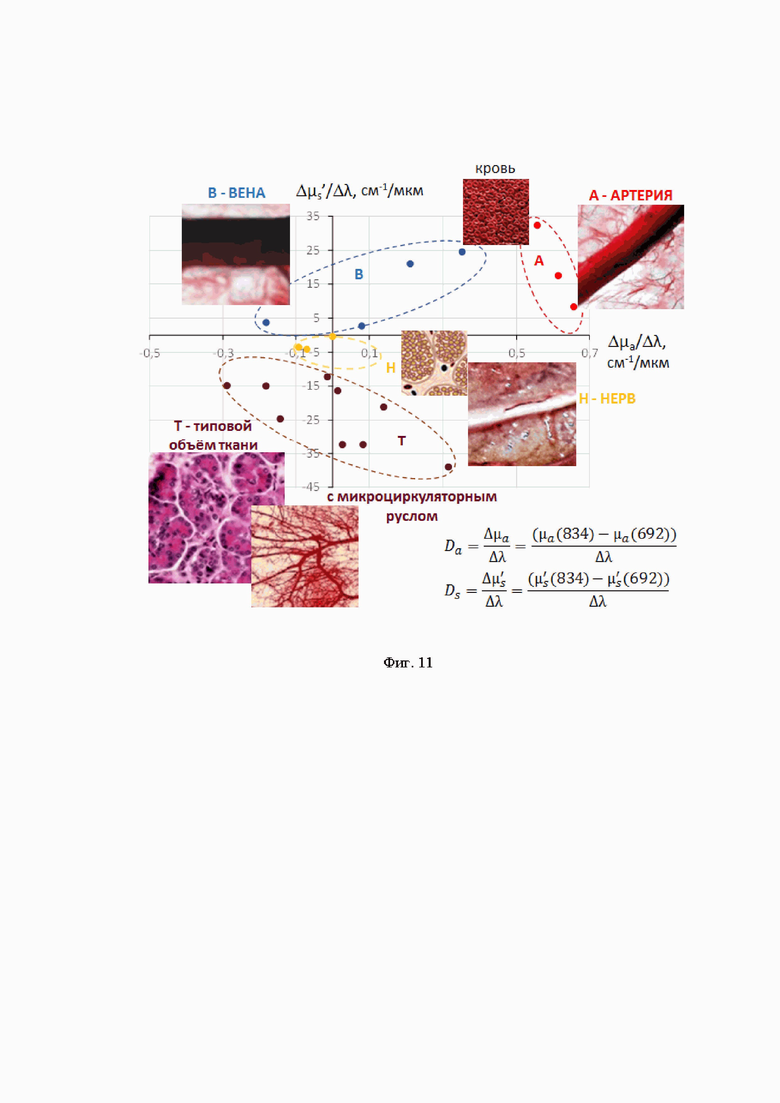
Изобретение поясняется иллюстративным материалом, где на фиг. 1 представлен продольный разрез оптико-хирургического устройства (а), вид сверху варианта рабочего торца круглого сечения (б), дополнительное сечение внутренней направляющей (в) и вариант выполнения ползуна - элемента кремальеры - в разрезе (г); на фиг. 2 представлены дополнительные сечения устройства: а) поперечное сечение с двумя направляющими, б) поперечное сечение браншей с режущими кромками и внутренней полостью сложного профиля, в) продольное сечение бранши с рабочим наконечником, г) поперечное сечение устройства с видом на подвижный рычаг; на фиг. 3 представлен вариант исполнения оптико-хирургического устройства с верхним креплением подвижной рукоятки; на фиг. 4 показан внешний вид варианта оптико-хирургического устройства с противоположных сторон; на фиг. 5 приведены варианты элементов крепления (неразъёмного (а) и съёмного (б)) оптико-хирургического устройства к системам позиционирования, позиционного контроля и/или силомоментных измерений; на фиг. 6 представлены варианты использования устройства совместно с системой направляющих элементов (а) или при подключении к коллаборативному роботу-манипулятору (б); на фиг. 7 отражены вариант выполнения рабочего торца малогабаритного оптико-хирургического устройства с секторным расположением приёмника и излучателей в сомкнутом состоянии (а), вид сечения рабочей торцевой поверхности секторного типа (б) и устройство в режиме зондирования биологической ткани с разомкнутыми браншами (в); на фиг. 8 представлены варианты конструкций рабочего торца оптико-хирургического устройства, в поперечном сечении, когда равномерность зондирования обеспечивается увеличением количества точечных источников (а) и/или приёмников (б), наличием линейки или матрицы приёмников (в) или увеличением количества раздвижных браншей (г), и представлен вариант со встроенными электродами для одномоментного электроимпедансного зондирования (д) исследуемого объёма биологической ткани; на фиг. 9 отображены отдельные примеры схем расположения на рабочем торце оптико-хирургического устройства групп и подгрупп излучателей относительно приемника; на фиг.10 и 11 представлен результат применения оптико-хирургического устройства, в частности, на фиг.10 - объект исследования (а): сосуды, нервы, мягкие ткани руки человека; макет устройства (б) с контролируемым разведением оптоволокон источников от оптоволоконного жгута приёмника; средства измерений (в), слева направо: спектрометр с временным разрешением, роботизированный мини-манипулятор и рабочая часть испытательной силомоментной установки; на фиг.11 - результаты правильного обнаружения и распознавания нейроваскулярных структур относительно мягких тканей, мышечной и кожно-жировой, по измеряемым методом спектроскопии с временным разрешением оптическим параметрам с реализацией возможности изменения глубины зондирования ткани.
Позициями на чертежах обозначены:
1 - бранши, внутри которых проходят оптоволокна (29) и жгут/жгуты (30) и в определённом порядке (группами и подгруппами) выходят на рабочих торцах брашней (рабочем торце оптико-хирургического инструмента (фиг. 2, б, в, фиг.6, а, б и фиг. 7);
2 - внутренняя направляющая корпуса, перемещающаяся (на допустимое расстояние) внутри наружной направляющей (4);
3 - тяги - жёсткие, недеформирующиеся стержни, толкающие и разводящие бранши (1) путём воздействия на подвижный рычаг (5) и его перемещения относительно неподвижной рукоятки (11), контролируемого и фиксируемого с помощью кремальеры, представленной элементами: (9) - пластиной с уступами и выемками (44) (или зубцами), (10) - выступом с прорезью (полостью), в которой расположена пластина (9), и (12) - ползуном, который сдвигается вверх/вниз в сквозном отверстии в (10) и может быть упором-фиксатором раздвижения браншей на определённый угол, когда вставлен в выемку (44) на пластине (9) кремальеры (фиг. 1 и фиг. 2);
4 - наружная направляющая корпуса, имеющая: полость для подвижной направляющей (2), ушко (13) с прорезью (в случае верхнего крепления подвижного рычага (5), как на фиг. 3) и отверстия для вставления подвижного рычага (5), выступ в виде неподвижной рукоятки (11), на которой выполнен неподвижный выступ (10), имеющий полость в виде направляющей для пластины (9) кремальеры (35) (фиг. 1, фиг.2, фиг. 3, фиг. 4) ; возможен вариант реализации изобретения, в котором есть продольный крепёжный выступ (19) для закрепления оптико-хирургического устройства в системах поддержки позиционирования (системах направляющих элементов типа (22)) и в автоматизированных системах позиционного-силового контроля (типа коллаборативных роботов-манипуляторов (26) (фиг. 5));
5 - подвижный рычаг, управляющий браншами (1), к которому бранши крепятся с помощью тяг (3), повороты верхнего конца которого допускаются вокруг оси цилиндрического штифта (14), а нижний конец рычага (5) перемещается в одной плоскости относительно неподвижной рукоятки (11) наружной направляющей (4) корпуса (34), и к которому шарнирно прикреплена внутренняя пластина (9) кремальеры (фиг. 1, фиг. 2, г, фиг. 3);
6 - винт, фиксирующий взаимное положение направляющих (2 и 4) корпуса, внутренней в наружной, и предохраняющий датчик силы (7) от случайных ударов, когда оптико-хирургическое устройство не используют в режиме измерений (диагностическом), а выполняют перемещения (ввод в операционное поле/ вывод из операционного поля) или предусмотренные (для этого устройства) хирургические манипуляции (фиг. 1 - 4);
7 - датчик силы (например, миниатюрный тензодатчик диаметром не более 15 мм) регистрирует силу прижатия в режиме измерения, когда винт (6) ослаблен вручную и не фиксирует взаимное неподвижное положение внутренний (2) и наружной (4) направляющих корпуса, при этом направляющая (2) перемещается относительно (4) и давит на чувствительную площадку датчика силы (фиг. 1, фиг. 3 - 5),
8 - произвольно сгруппированные оптоволокна источников (могут быть объединены все единой оплёткой для размещения в полости внутренней (2) направляющей корпуса) и отдельно проходящий оптоволоконный жгут/жгуты приёмника (не менее одного) (фиг. 1 - 3); на выходе из корпуса (34) через предусмотренные отверстия (18) (фиг. 4) все оптоволокна и жгуты могут быть объединены единой оплёткой, с последующим их разделением на противоположном конце в виде стандартных коннекторов для подключения к спектрометру, выполненному с возможностью формирования зондирующего оптического излучения для диффузионной спектроскопии с временным разрешением, например, как описано в RU 2736307 и приёма рассеянного в исследуемой биологической ткани в обратном направлении излучения;
9 - внутренняя пластина кремальеры (35) с выемками/упорами/зубцами для установки положения подвижного рычага (5) относительно неподвижной рукоятки (11) наружной направляющей (4) корпуса (34) и установки требуемого угла раскрытия браншей (1), определяющего расстояния между группами оптоволокон излучателей (29) (фиг. 7 а) и жгутом/жгутами приёмников (30) (фиг. 7 а), а, следовательно, определяющего зондируемую глубину, зондируемый объем ткани и пространственное разрешение;
10 - выступ неподвижной рукоятки (11) наружной направляющей (4) корпуса (34), сформированный радиальными образующими, жёстко неразъёмно скреплённый с рукояткой (11) и имеющий внутреннюю полость для свободного хода в ней пластины (9) кремальеры (35), пластина (9) шарнирно крепится на рычаге (5) (фиг.1, а);
11 - неподвижная рукоятка наружной направляющей (4) корпуса (34), относительно которой рукой перемещают подвижный рычаг (5) и фиксируют его положение посредством кремальеры (элементы (9), (10) и (12)) (фиг.1, а, фиг.4);
12 - плоский ползун, который фиксирует раскрытие кремальеры в определённом положении с помощью выемок (44) (пазов/уступов/зубцов) в пластине (9) кремальеры (35) (фиг. 1,а, г) и фиксирует раскрытие браншей (1) на определённый угол, от нулевого (сомкнуты бранши для ввода в операционное поле) через промежуточное(ые) для обеспечения необходимого положения оптоволокон излучателей относительно приёмного жгута (жгутов), до максимального угла раскрытия браншей для максимально возможной при такой конструкции оптико-хирургического инструмента глубины зондирования исследуемой биологической ткани (с определёнными размерными соотношениями всего устройтва под условия хирургической операции: от нейрохирургических с трансназальным доступом, до полостных с открытым доступом в рану);
13 - ушки (фиг.1, а и фиг. 2, г), жёстко связанные с внутренней направляющей (2), при нижнем креплении к ним подвижного рычага (5) с помощью цилиндрического штифта (14) или ушко с прорезью (как монолитная часть наружной направляющей (4) корпуса или жёстко неразъёмно соединённая с (4)) для вставки подвижного рычага (5) и подвижного соединения его с помощью цилиндрического штифта (14) (фиг. 3);
14 - цилиндрический штифт для подвижного крепления рычага (5), закрепляемый в ушке (ушках) съёмными крепёжными элементами (17);
15 - плоская пружина (фиг. 1,а) (пружинящие пластины (фиг. 4)), обеспечивающая разведение подвижного рычага (5) и неподвижной рукоятки (11);
16 - стандартный разъём (фиг. 4) и соединительные провода датчика силы (7) для соединения его с блоком регистрации сигнала в процессе измерений;
17 - съёмные крепёжные элементы для закрепления цилиндрического штифта (14), в ушках/ушке (13) (фиг.4),
18 - корпусные отверстия (например, боковые) в наружной (4) и внутренней (2) направляющих корпуса оптико-хирургического устройства (фиг. 4) для вывода оптоволоконного кабеля (с волокнами источников и жгутами приёмников) и проводов подключения электродов, если предусмотрено электроимпедансное зондирование исследуемой биологической ткани одномоментно или отдельно от оптического зондирования;
19 - продольный выступ наружной направляющей (4) корпуса (фиг. 5, а) для закрепления оптико-хирургического устройства в системах поддержки позиционирования, например, в виде системы направляющих (22) (фиг. 6,а) с количеством степеней свободы не менее четырёх (тогда датчик силы (7) и винт (6) используют также, как в ручном режиме использования оптико-хирургического устройства) или для закрепления в автоматизированных системах позиционного-силового контроля, например, типа коллаборативного робота-манипулятора (26) (фиг. 6,б), тогда винт (6) всегда, и при введении инструмента, и в диагностическом режиме измерений, и при хирургических манипуляциях, находится в положении, фиксирующем внутреннюю (2) и наружную (4) направляющие неподвижно друг относительно друга, т.к. вместо датчика силы (7) используют показания силомоментного датчика (27) кобота (26) (фиг. 6,б);
20 - крепёжный элемент-выступ (фиг. 5, б), который вставляют в наружную направляющую (4) корпуса вместо датчика силы (7) и закрепляют с помощью крепёжного винта (21), если оптико-хирургическое устройство используется только вместе с автоматизированной системой позиционного-силового контроля, например, типа коллаборативного робота-манипулятора (26) (сокращённо - кобота) или любым другим вариантом автоматизированной системы позиционирования и манипуляций устройством;
21 - крепёжный винт для фиксации крепёжного элемента-выступа (20) на наружной направляющей (4) корпуса оптико-хирургического устройства (фиг.5, б);
22 - система направляющих элементов с числом степеней свободы не менее 4 для поддержки позиционирования оптико-хирургического устройства (фиг. 6, а);
23 - узел крепления оптико-хирургического устройства (25) к системе (22) направляющих элементов (фиг. 6, а);
24 - узел крепления оптико-хирургического устройства (25) к автоматизированной системе позиционного-силового контроля, например, типа кобота (26) (фиг. 6, б);
25 - оптико-хирургическое устройство, соединительные провода (16) датчика силы (7) и оптоволоконный кабель не отображены (фиг. 6, а, б);
26 - коллаборативный робот-манипулятор с 6-ю степенями свободы (фиг. 6, б) в качестве варианта автоматизированной системы позиционно-силового контроля и манипуляций оптико-хирургическим устройством;
27 - силомоментный датчик;
28 - подвижная платформа (двух- или трёхкоординатная) (фиг. 6, б) для перемещений системы позиционного/позиционно-силового контроля или автоматизированной системы;
29 - оптоволокна источников зондирующего излучения (излучатели) (фиг. 7, б, фиг. 8);
30 - оптоволоконный жгут приёмника обратно рассеянного в исследуемой биологической ткани излучения (фиг. 7, б, фиг. 8),
31 - электроды на рабочем торце оптико-хирургического устройства (фиг. 8, д);
32 - исследуемая биологическая ткань (фиг. 7, в),
33 - осевой цилиндр браншей (1) относительно которого происходит поворот и раскрытие браншей (1) на определённый угол, который представлен в варианте компоновки устройства с ушками (13) вниз и с нижним креплением подвижного рычага (5) (фиг.1, а);
34 - корпус оптико-хирургического устройства, состоящий из внутренней (2) и наружной (4) направляющих (фиг. 1, а, фиг.3);
35 - кремальера, образуемая элементами (9), (10) и (12) (фиг. 1, а);
36 - режущие кромки браншей для хирургических манипуляций (фиг. 2, а);
37 - рабочий оптоволоконный наконечник браншей/рабочий торец (фиг. 1, а, фиг. 2, б);
38 - отверстия под оптоволокна или оптоволоконный жгут в рабочем наконечнике (37) браншей (1) (фиг. 2, б) для вывода источников/приёмников на рабочий торец;
39 - отверстия в материале браншей для оптоволокон или жгутов (фиг.2, а) и направления их в полость внутренней направляющей (2) корпуса (34);
40 - внутренняя полость при сомкнутых браншах (фиг.2, а), образованная желобками браншей для заполнения биологической тканью при хирургических манипуляциях;
41 - паз в наружной направляющей (4) корпуса (34) для сборки устройства и оперативной замены, при необходимости, браншей (1) с тягами (3), внутренней направляющей (2) и подвижного рычага (5) (фиг. 2, в);
42 - полость внутри выступа (10) неподвижной рукоятки (11) для пластины (9) кремальеры (35) (фиг. 1, а);
43 - шарнирное соединение пластины (9) кремальеры с подвижным рычагом (5) (фиг.1. а).
Осуществление изобретения
Устройство содержит следующие основные конструктивные блоки: бранши для диагностики и хирургических манипуляций; блок разведения браншей на определённый фиксированный угол; оптический или оптоволоконный блок для реализации спектроскопии с временным разрешением и зондирования на определённую глубину; блок контроля силы прижатия или позиционно-силового контроля по заданному алгоритму в ручном и/или автоматизированном режимах; блок стыковки с внешними устройствами позиционно-силового контроля.
Возможен вариант реализации устройства с блоком для проведения электроимпедансной диагностики.
К блокам предъявляются следующие требования.
Бранши (1) имеют наименьшие габариты в сомкнутом состоянии, например, с максимальным поперечным размером не более 6 мм, что важно для введения в операционное поле через малый доступ, например, трансназально, а в раскрытом для проведения оптической диагностики состоянии обеспечивают определённые расстояния между подгруппами оптоволокон источников и оптоволоконным жгутом приёмника в оптоволоконном блоке, например, более 0 мм и до 20 мм для нейрохирургии трансназального доступа и/или при других операциях с малым операционным полем и узким доступом к полю, или, предпочтительнее, различными интервалами от 0 мм и до двух длин браншей при допустимом угле раскрытия браншей в 180 градусов и с предусмотренной конструктивно возможностью проведения спектроскопии с временным разрешением в таком максимально раскрытом состоянии или при больших углах раскрытия более 120 градусов. В заявляемом устройстве предусмотрены разные фиксированные углы раскрытия браншей, например, от 20 градусов до 60 градусов в нейрохирургии трансназального доступа и/или при других операциях с малым операционным полем и узким доступом к полю, или, предпочтительнее, различными интервалами в диапазоне более 0 градусов и до 180 градусов, которые обеспечивают разные глубины зондирования и должны соответствовать размерам операционного поля и разным вариантам доступа к исследуемому объёму биологической ткани, и разным вариантам конструктивного исполнения. Для обеспечения надёжного контакта устройства с исследуемой биологической тканью, без воздушных зазоров, рабочие торцы браншей выполнены со скосами по направлению к продольной оси устройства, образующими угол с перпендикуляром к продольной оси бранша предпочтительно величиной не менее половины среднего угла раскрытия браншей из применяемых в рабочем состоянии при зондировании биологической ткани и не более половины максимального угла раскрытия браншей. Скошенные торцы браншей могут быть выполнены в виде отдельных наконечников (37), предусматривающих вывод оптоволокон и жгутов и неподвижно соединяемых с браншами, например, клеем. Или сами бранши имеют скошенные под необходимым углом рабочие торцы. Количество браншей должно быть не менее двух, для реализации диффузионной спектроскопии с временным разрешением и достижения технического результата устройства. Для повышения равномерности зондирования исследуемого объёма биологической ткани может быть предусмотрено использование более двух браншей. Для повышения универсальности устройства может быть реализована возможность оперативной замены браншей в процессе хирургической операции (интраоперационно) для соответствия требованиям интраоперационной диагностики и хирургического вмешательства. Рабочие торцы и бранши и могут иметь разный профиль контура поперечного сечения для обеспечения необходимой равномерности зондирования исследуемого объёма биологической ткани и требуемого пространственного разрешения/чувствительности и/или возможности выполнения требуемых хирургических манипуляций.
Блок разведения браншей обеспечивает определённый фиксированный угол раскрытия браншей, глубину зондирования и пространственное разрешение. В отдельных вариантах исполнения устройства блок разведения браншей включает неподвижную рукоятку корпуса (11) и подвижный рычаг (5), перемещения которого и фиксация в определённом положении регулируются пружинным элементом (например, плоской пружиной (15)) и кремальерой (35), пластина (9) которой шарнирно (43) связана с рычагом (5), а также жёсткие тяги, связывающие бранши с подвижным рычагом и толкающие бранши под действием рычага. Пластина (9) кремальеры (35) перемещается во внутренней полости выступа (10) рукоятки (11) и фиксируется ползуном (12) в выемках (44) пластины (9). Блок разведения браншей может иметь и другое конструктивное решение, реализующее перечисленные выше функции.
Оптоволоконный или оптический блок обеспечивает подвод оптического зондирующего излучения к исследуемой биологической ткани и регистрацию обратно рассеянного излучения, например, встроенными в рабочие концы (37) браншей (1) оптоволокнами и жгутами требуемого количества и взаимного расположения, в зависимости от необходимой глубины зондирования, необходимого пространственного разрешения и необходимой чувствительности к нейроваскулярным включениям в исследуемом объёме биологической ткани. Для обеспечения сохранности оптоволокон и жгутов их проводят от рабочих торцов (37) через специальные полости (39) в браншах (1) и далее в полости внутренней направляющей (2) корпуса (34) устройства, а также выводят из корпуса через специальные отверстия (18) во внутренней (2) и наружной(4) направляющих, согласованно расположенные для формирования сквозного, неперекрываемого, отверстия в корпусе (34) устройства.
Блок контроля положения и/или силы прижатия на основе датчика силы и/или силомоментного датчика обеспечивает единство измерений, воспроизводимость результатов и эффективность диагностики, т.к. позволяет регистрировать усилие прижатия браншей к биологической ткани, обеспечивать надёжный контакта устройства с исследуемой биологической тканью в ходе диагностики, устранять двигательные артефакты в информативных оптических сигналах и контролировать подвижность, например, динамику кровотока, в исследуемом объеме биологической ткани. Для обеспечения указанных выше функций датчик силы (7) предпочтительно расположен между внутренней (2) и наружной (4) направляющими корпуса (34) устройства. Для предотвращения выпадения датчика силы (7) из корпуса в процессе интраоперационной диагностики и хирургических манипуляций может быть предусмотрена фиксация датчика силы (7) внутри наружной направляющей (4) корпуса, неразъёмная, например, путём вклеивания, или разъёмная, например, с помощью пластины-крышки или ограничительной пластины для отверстия в корпусе (34) (в наружной направляющей (4)), через которое вставляется/вынимается датчик силы (7), которая крепится к корпусу (наружной направляющей), например, с помощью винта/винтов. Как вариант, возможно расположение плоской пружины (подпружиненной пластины) между датчиком силы (7) и направляющей (4), при этом пружина неразъёмно прикреплена к направляющей (4).
Блок контроля положения и/или силы прижатия, или позиционно-силового контроля, может быть выполнен в механизированном, автоматизированном или ручном исполнении с использованием силомоментных, силовых, угловых и других видов датчиков, позволяющих определить положение и/или силу прижатия оптико-хирургического устройства к исследуемой биологической ткани. Механизированное исполнение предполагает использование в качестве блока контроля положения штатива и/или набора направляющих (22) для точного направления (требуемого позиционирования) оптико-хирургического устройства (25) в точке интереса, а для контроля силы прижатия применение датчика силы (7), встроенного в устройство или датчика силы (силомоментного датчика), встроенного в узел крепления (23) направляющей, к которой неподвижно крепится устройство (25). В качестве автоматизированной системы контроля положения может быть использован, например, роботизированный манипулятор (коллаборативный робот (26)) с которым через узел крепления (24) неподвижно соединено устройство (25) и в который встроен силомоментный датчик (27). Может быть предусмотрено внешнее дополнительное позиционирование кобота (26), например, с помощью подвижного стола/платформы (28), двух- или трёхкоординатрного. Также может дополнительно использоваться внешняя система компьютерного зрения, связанная программно с позиционным контролем кобота (26) и включающая не менее одной видеокамеры. В ручном исполнении датчики положения и/или силы входят в состав оптико-хирургического устройства, контроль положения которого осуществляет оператор устройства, основываясь на интраоперационном видеонаблюдении и/или на показаниях датчиков.
Блок стыковки может быть образован крепёжными элементами типа (19) или (20, 21) для соединения оптико-хирургического устройства с системами позиционирования/позиционно-силового контроля типа (22), (26) или иного исполнения для направления, управления и контроля положения устройства в пространстве и по отношению к исследуемому объёму биологической ткани.
Далее более детально представлено описание заявляемого изобретения, не ограничивающее его сущность. Специалисту понятно, что изобретение имеет различные варианты его осуществления, и детальное описание отдельных вариантов его реализации носит исключительно пояснительный характер, демонстрирующий возможность достижения заявленного технического результата. Заявляемое устройство может подвергаться различным изменениям и модификациям, понятным специалисту на основе прочтения данного описания. Такие изменения не ограничивают объем притязаний. Например:
- возможны различные варианты исполнения корпуса с разным количеством составных элементов (не только внутренняя и наружная направляющие), разные форма и длина направляющих корпуса и других его возможных элементов, обеспечивающих, например отклонения браншей на определённые углы влево/вправо и/или вверх/вниз;
- может изменяться количество, длина, форма браншей, а также форма скошенного рабочего торца браншей, они могут иметь дополнительные составные элементы, например, выдвигающиеся вперёд из браншей для проведения хирургических манипуляций, бранши могут иметь составную форму со сгибом относительно продольной оси без повреждения проходящих внутри оптоволокон и жгутов;
- блок разведения браншей может иметь разные варианты конструктивного исполнения, вида и количества составных элементов, обеспечивающих необходимое функционирование браншей и выполнение заявленной функции разведения браншей на фиксированные углы, может быть с ручным, электронным или дистанционным автоматическим и/или автоматизированным управлением;
- оптоволоконный блок может иметь различные варианты группировки и количества подгрупп, групп (контактных) источников и приёмников обратно рассеянного в ткани излучения, контакт с биологической тканью может осуществляться непосредственно через оптоволокна и жгуты, либо через дополнительные преломляющие и/или отражающие оптические элементы типа линз, призм и пр. или системы оптических элементов, различные варианты формирования жгутов для различных вариантов вывода из корпуса устройства;
- может изменяться количество длин волн зондирующего биологическую ткань излучения, форма оптоволоконных жгутов, разные фотоприёмники могут быть непосредственно встроены в бранши, включая линейки и матрицы фотоприёмников.
Устройство содержит бранши (1), которые прикреплены к одному концу внутренней направляющей (2), соосно вставленной в наружную направляющую (4) корпуса (34) (фиг.1, фиг. 2, фиг. 3). Относительное положение наружной (4) и внутренней (2) направляющих может быть зафиксировано винтом (6). Между торцевыми поверхностями наружной (4) и внутренней (2) направляющими со стороны крепления неподвижного рычага (11) расположен датчик силы (7). Бранши (1) с помощью тяг, выполненных, например, в виде стержней (3) прикреплены к подвижному рычагу (5), например, с помощью цилиндрического штифта (14) на обоих концах которого имеются крепёжные ограничители (17). Подвижный рычаг закреплён между ушек (13), жёстко связанных с внутренней направляющей (2) корпуса (фиг.1). Возможен вариант выполнения (фиг. 3) с верхним креплением подвижного рычага (5) цилиндрическим штифтом (14) в прорези ушка (13) наружной направляющей (4), что допускает прикрепление более двух подвижных браншей. Бранши могут иметь общую ось поворота (33), расположенную перпендикулярно оси направляющих (2) и (4) корпуса (34) (фиг.1, а).
Оптоволокна излучателей (29) и оптоволоконный жгут/жгуты приемника (30) встроены в рабочие наконечники (37) браншей, проходят в полостях (39) браншей и в полости внутренней направляющей (2) корпуса (34) в виде произвольно сгруппированных жгутов (8) (фиг.1, фиг. 2, фиг. 3) вдоль тяг (3) и выходят из оптико-хирургического устройства через отверстия (18) во внутренней (2) и наружной (4) направляющих (фиг. 4). Наружная (4) и внутренняя (2) направляющие корпуса (34) оптико-хирургического устройства могут иметь разные профили сечения, от круглого (как показано на фиг. 1-4), округло-квадратного до прямоугольно-вытянутого или сложного, в том числе отличающиеся по длине внешней и внутренней направляющих, но одинаковые в месте стыковки последних. Рабочие наконечники (37) браншей (1) имеют наклонный профиль (рабочий торец) относительно продольной оси устройства для обеспечения лучшего контакта с биологической тканью в процессе диагностики. Требуемая величина наклона определяется используемыми углами раскрытия браншей, и угол линии торца брашни с перпендикуляром к продольной оси бранша имеет величину не менее половины среднего угла раскрытия браншей из применяемых в рабочем состоянии при зондировании биологической ткани и не более половины максимального угла раскрытия браншей более 0 градусов и до 120 градусов.
В частности, скосы рабочих торцов браншей по направлению к продольной оси устройства, образующие угол (α) с перпендикуляром к продольной оси браншей в сомкнутом состоянии определяются величиной, например, не менее половины среднего угла раскрытия (βср) браншей из возможных фиксированных рабочих углов раскрытия (βi, i=1..m), применяемых в конкретном варианте устройства для зондирования биологической ткани, и не более половины максимального угла раскрытия (βmax ) браншей, допустимого в рабочем состоянии для зондирования:
 ;
;  .
.
При допустимых углах раскрытия браншей более 120 градусов и до 180 градусов бранши имеют специальное конструктивное исполнение с расположением оптической части (оптоволокон, жгутов и/или других оптических элементов) внутри браншей и/или на дополнительном внутреннем скосе.
Устройство имеет кремальеру (35), образованную выступом (10), скреплённым с неподвижной рукояткой (11) наружной направляющей (4) корпуса (фиг.1, фиг.2, фиг.3), вставленной внутрь выступа пластиной (9) с выемками (44) и уступами, а также плоским ползуном (12), перемещающимся вверх/вниз в сквозном отверстии выступа (10), для обеспечения и фиксации требуемого угла раскрытия браншей (1). Пластина (9) шарнирно скреплена с подвижным рычагом (5).
Между подвижным рычагом (5) и неподвижной рукояткой (11) могут быть закреплены пружинные элементы, например, в виде плоской пружины (15) любой конструкции (фиг. 1, фиг. 4).
Миниатюрный датчик силы (7), например, тензодатчик диаметром не более 15 мм, через стандартный разъём (16) и с помощью соединительных проводов может быть соединён с платой блока регистрации данных.
Наружная направляющая (4) корпуса (34) имеет паз снизу (41) почти по всей длине направляющей до неподвижной рукоятки (11) (как на фиг. 1, а) для обеспечения возможности сборки и разборки устройства, и оперативной замены браншей с внутренней направляющей и подвижным рычагом.
Возможен также вариант реализации изобретения, когда наружная направляющая (4) корпуса имеет продольный выступ (19) (фиг. 5, а) или устройство имеет дополнительный крепёжный элемент (20), вставленный вместо датчика силы в наружную направляющую (4) и зафиксированный с помощью крепёжного винта (21) (фиг. 5, б). Элементы (19) и (20) служат для стыковки устройства с внешними системами позиционирования, позиционного контроля и/или силомоментных измерений, как, например, показано на фиг. 5, где через продольный выступ (19) оптико-хирургическое устройство (25) соединено через узел крепления (23) с системой (22) направляющих элементов (фиг. 6, а) с количеством степеней свободы не менее 4. Вставляемый крепёжный элемент (20) допускает подключение устройства (25) через узел крепления (24) к силомоментному датчику (27), соединенённому с коллаборативным роботом-манипулятором (26) (коботом) с шестью степенями свободы (фиг. 6, б). Кобот (26) зафиксирован на подвижной двух/трёх-координатной платформе (28), в случае необходимости.
Одной из наиболее простых конструкций рабочего торца оптоволоконного датчика (фиг. 7, а, б), является секторный вариант с одним приёмником и восемью источниками (фиг. 7, б), реализующий два линейных варианта минимальной конфигурации - по два расстояния от приёмника (30) до подгрупп излучателей (29) и по две длины волны из красного и ближнего инфракрасного (КБИК) диапазона в каждой подгруппе. В сомкнутом состоянии датчик имеет минимальные габариты для ввода в операционное поле (фиг. 7, а), в рабочем состоянии с разведёнными браншами (фиг. 7, в) обеспечивает необходимую глубину зондирования исследуемого объёма биологической ткани (32). Диапазон глубин зондирования определяется диапазоном расстояний (rj, j=1..M, M≥2) от подгрупп излучателей до приёмника (фиг. 9) и диапазоном фиксированных углов раскрытия браншей от минимального до максимального. Каждая группа излучателей состоит, как минимум, из двух подгрупп, каждая из которых содержит излучатели, по меньшей мере, двух длин волн из указанного диапазона значений, расположенные друг от друга на расстоянии не более 1 мм, и каждая подгруппа - на определённом расстоянии (rj, j=1..M, M≥2) от приёмника вдоль соответствующей полуоси, что обеспечивает указанную глубину зондирования по каждому направлению вдоль полуоси.
Более сложные варианты конструкций рабочего торца оптоволоконного датчика представлены на фиг. 8, где равномерность зондирования обеспечивается увеличением количества источников (фиг. 8, а) и/или приёмников (фиг. 8, б), наличием линейки приёмников (фиг. 8, в) или увеличением количества раздвижных браншей (фиг. 8, г). Вариант конструкции оптико-хирургического устройства, представленный на фиг. 3, допускает наличие от двух до четырёх подвижных браншей и более.
Близкая к квадратной форма сечения браншей (1) и внутренней направляющей (2) корпуса оптико-хирургического устройства обеспечивает наиболее плотное расположение элементов оптического зондирования биологической ткани, оптоволокон источников и приёмников (фиг. 8, а-в). Также возможен вариант размещения на рабочем торце устройства электродов (31) (фиг. 8, д) для проведения электроимпедансного зондирования совместно с оптическим зондированием [Биоимпедансный анализ состава тела человека / Д.В. Николаев, А.В. Смирнов, И.Г. Бобринская, С.Г. Руднев. - М.: Наука, 2009. - 392 с.]. На фиг. 8 (д) электродная сборка представлена четырьмя внешними токовыми электродами и четырьмя внутренними потенциальными электродами, образующими два тетраполярных измерительных канала.
Вариант устройства, выполненный с возможностью проведения хирургических манипуляций с биологическими тканями, имеет режущие боковые кромки (36) браншей (1) и внутреннюю полость (40) сложного профиля внутри каждой бранши на участке с режущими кромками, где предусмотрены полости (39) для выведения оптоволокон источников и жгута приёмника от рабочего наконечника (37) в полость внутренней направляющей (2) (фиг. 2 б, в).
Оптико-хирургическое устройство позволяет обнаруживать и распознавать нейроваскулярные структуры, магистральные артериальные и венозные сосуды и нервы в объёме биологической ткани, в том числе опухолевой. Более детально способ такого обнаружения и распознавания раскрыт в описании патента на изобретение RU 2736307.
Устройство работает следующим образом.
В начальном состоянии внутреннюю направляющую (2) с помощью винта (6) вручную фиксируют в наружной направляющей (4). Подвижный рычаг (5) сжимают вручную по направлению к неподвижному рычагу (11), при этом пластина (9) кремальеры вдвигается внутрь выступа (10) на неподвижном рычаге (11) и бранши (1) плотно смыкаются. Устройство имеет минимальные габариты и может вводиться в операционную полость. При наличии в устройстве раздвигающих пружинных элементов, например, плоской пружины (15), сомкнутое положение браншей удерживают вручную (фиг. 1, 4) или с помощью соответствующей выемки типа (44) на пластине (9) кремальеры (фиг. 2, б), в которую вставляют ползун (12).
Для проведения оптических измерений по способу, описанному в патенте RU 2736307, сняв ползун (12), если он был зафиксирован, вручную или с помощью плоской пружины (15) отводят подвижный рычаг (5) от неподвижной рукоятки (11), при этом расходятся бранши (1). Нужный угол расхождения браншей (1) фиксируют ползуном (12) в соответствующей выемке (44) пластины (9) кремальеры (35). Ручным поворотом винта (6) обеспечивают нефиксированное взаимное положение внутренней (2) и наружной (4) направляющих корпуса оптико-хирургического устройства, что позволяет контролировать силу прижатия устройства к биологической ткани и изменения силы прижатия.
В рабочем состоянии для проведения оптического зондирования бранши (1) разводят на определённый угол (фиг. 1, 3), соответствующий набору определённых расстояний между подгруппами источников (29) и приёмником/приёмниками (30), реализованных на рабочем торце (41) устройства (фиг.7, фиг. 8, фиг. 2,в). Разведение осуществляют вручную с помощью тяг (3), подвижного рычага (5) и кремальеры (35) с ползуном (12), который одним пальцем поднимают и опускают в сквозном отверстии (45) выступа (10) неподвижной рукоятки (11). Приведённые на фиг. 1 и фиг. 3 варианты устройства позволяют обеспечить одно промежуточное раскрытие браншей (1) по выемке (44) между уступами пластины (9) кремальеры (35), в которую опускается ползун (12). Количество возможных углов раскрытия и глубин зондирования изменяется путём выполнения дополнительных выемок (44) на пластине (9) кремальеры, в которые опускают ползун (12), и определяется зависимостью между значениями расстояний «источник-приёмник» на рабочем торце устройства и определённым углом раскрытия браншей (1), которому ставится в соответствие номер выемки (44) на пластине (9) кремальеры (35).
Механический контакт и взаимодействие устройства с исследуемой биологической тканью контролируют с помощью встроенного между внутренней (2) и наружной (4) направляющими датчика силы (7), который через стандартный разъём (16) с помощью проводов подключают к плате блока регистрации и/или к компьютеру для дальнейшей обработки. Сигналы с датчика силы (7), регистрируемые при ручном манипулировании устройством, применяют для контроля за силой прижатия устройства к исследуемой биологической ткани, для устранения двигательных артефактов из одномоментно регистрируемых и обрабатываемых оптических сигналов. В качестве датчика силы (7) может быть использован миниатюрный тензодатчик диаметром не более 15 мм [Миниатюрные тензодатчики. [Электронный ресурс] Режим доступа: https://tokves.ru/miniatyurnyie-datchiki.html?yclid=1960109841313981044].
Предлагаемое оптико-хирургическое устройство может иметь различные габаритные размеры, наружная (4) и внутренняя (2) направляющие корпуса (34) могут иметь различные профили сечения, от круглого, округло-квадратного до прямоугольно-вытянутого или сложного, в том числе отличающиеся по длине внешней и внутренней направляющих, но одинаковые в месте стыковки последних. Наиболее подходящие размер и форма устройства определяются размерами операционного поля и способом доступа к нему, от нейрохирургии основания черепа с трансназальным доступом до полостных операций, а также свойствами исследуемого объёма биологической ткани, его размерами и однородностью по составу и структуре, а, значит, и по оптическим свойствам. Например, при диаметре опухоли 6 см расстояния rj составляют, предпочтительнее, от 6 мм до 12 мм , что определяет углы раскрытия браншей при их известной длине, размере поперечного сечения, форме и размере рабочего торца.
Возможна оперативная замена рабочего торца устройства вместе с подвижным рычагом (5) и соединительными тросами (3) с целью наилучшего соответствия оптико-хирургического устройства решаемой с его помощью задачи.
В случае необходимости применения системы (22) направляющих элементов (фиг. 6, а) с количеством степеней свободы не менее 4 (для улучшения точности позиционирования и направления устройства, снижения нагрузки на руку при манипуляциях и уменьшения амплитуды двигательных артефактов в информативных оптических сигналах) наружную направляющую (4) корпуса устройства выполняют с продольным выступом (19) (фиг. 5, а), которым устройство вставляют в узел крепления (23) (фиг. 6, а).
Возможен вариант реализации устройства с дополнительным крепёжным элементом (20), который вставляют вместо датчика силы в наружную направляющую (4) и фиксируют с помощью крепёжного винта (21) (фиг. 5, б). Вставляемый крепёжный элемент (20) допускает подключение устройства (25) через узел крепления (24) к силомоментному датчику (27), соединенённому с коллаборативным роботом-манипулятором (26) (коботом) с шестью степенями свободы (фиг. 6, б) [Каталог промышленных роботов. Настольные минироботы [Электронный ресурс] Режим доступа: http://robotforum.ru/promyishlennyie-robotyi.html; Силомоментные датчики. ForceKit от Weiss-Robotics. [Электронный ресурс] Режим доступа: http://ant-company.ru/catalog/forcesensor/forcekit/]. Кобот (26) фиксируют на подвижной, как минимум, двухкоординатной платформе (28). Кобот (26) и платформу (28) подключают к контроллеру и управляют ими с помощью специального программного обеспечения в соответствии со способом, описанным в RU 2736307.
Острые режущие кромки (36) и внутренняя полость (40) браншей (фиг. 2 б, в) позволяют проводить отдельные хирургические манипуляции с биологическими тканями наряду с выполнением диагностической процедуры.
Встроенные в бранши электродные сборки (фиг. 7, д) позволяют одновременно с оптическим проводить электроимпедансное локальное зондирование исследуемого объёма биологической ткани биполярным или тетраполярным методом [Биоимпедансный анализ состава тела человека / Д.В. Николаев, А.В. Смирнов, И.Г. Бобринская, С.Г. Руднев. - М.: Наука, 2009. - 392 с.].
Допустимый диапазон углов раскрытия браншей определяется конструкцией оптоволоконного датчика с требуемым доступом к операционному полю с учётом размеров операционного пространства. Угол раскрытия определяет величину зондируемого объёма биологической ткани.
Распределённые, а не точечные, источники с равномерной засветкой исследуемого объёма не обеспечивают пространственного разрешения и пространственной чувствительности к нейроваскулярным структурам в исследуемом объёме.
Пространственное разрешение и чувствительность, которые способно обеспечить предлагаемое оптико-хирургическое устройство для обнаружения и распознавания нейроваскулярных структур, определяются размерами минимально необходимого объёма биологической ткани для реализации спектроскопического метода с временным разрешением [Оптическая биомедицинская диагностика. В 2 т. Т. 1 / Пер. с англ. под ред. В. В. Тучина. - М.: Физматлит, 2007. - 560 с. Гл.3, Гл.7], соответствующими расстояниям от излучателей до приёмника не менее 5 мм, и количеством каналов измерения спектрометра, используемого с оптико-хирургическим устройством.
Для проверки реализуемости предлагаемого оптико-хирургического устройства и его функциональных возможностей для обнаружения и распознавания нейроваскулярных структур был изготовлен макет (фиг. 10, б) на основе хирургического инструмента с контролируемым и фиксируемым в нужном положении разведением рабочих концов, к которым прочно приклеивались стержни, имитирующие отдельные бранши устройства. Стержни изготовлены в ООО «НТЦ Волоконно-оптических устройств». Рабочий конец одного стержня содержит окончания оптоволокон излучателей, расположенные секторно, как показано на фиг.7, б. Рабочий конец другого стержня содержит окончание оптоволоконного жгута приёмника. Объектом исследования являлась внутренняя область руки человека, участки ладони, запястья и предплечья (фиг. 10, а). Примерная локализация магистральных вен, артерий и нервных стволов известна из анатомического атласа, перед испытаниями макета устройства локализация нейроваскулярных структур уточнялась методом ультразвуковой визуализации. Для измерения оптических параметров, коэффициентов поглощения (μа) и транспортного рассеяния (μs’) использовался спектрометр с временным разрешением и фазово-модуляционным подходом “OxiplexTS” (ISS, Inc., USA) (фиг. 10 в) [Сайт компании ISS. [Электронный ресурс] Режим доступа: http://iss.com/biomedical/instruments/oxiplexTS.html]. Для позиционно-силового контроля использовался настольный манипулятор типа “UFACTORY uArm Swift Pro” [Роборука “UFACTORY uArm Swift Pro”. [Электронный ресурс] Режим доступа: https://top3dshop.ru/robots/uarm-swift-pro.html], с датчиками силы и расстояния и системой компьютерного зрения, а также применялась силовая установка Instron 8801 (фиг. 10, б).
Макет устройства позволяет воспроизводить результаты, заявленные в RU 2736307, при расстояниях между источниками и приёмником на рабочем торце в диапазоне от 6 мм до 12 мм. Результаты обнаружения и распознавания нейроваскулярных структур приведены на фиг. 11. Приведённые примеры подтверждают реализуемость и эффективность предлагаемого устройства.
Таким образом, заявляемое устройство позволяет устранить следующие недостатки, присущие наиболее близкому решению, известному из уровня техники: ограниченность поля зрения, малый диагностируемый объём биологической ткани и малая глубина исследования; отсутствие возможности контролируемо изменять глубину зондирования биологической ткани; неконтролируемое позиционирование и/или неконтролируемая сила прижатия оптоволоконного датчика к поверхности исследуемого объёма биологической ткани; неконтролируемое пережатие биологической ткани в момент контактного зондирования исследуемого объёма и, как следствие, искажение полученных данных за счёт изменения структурных и оптических параметров; отсутствие возможности реализации спектроскопии с временным разрешением и, как следствие, проведения количественного анализа состава и структуры исследуемого объёма биологической ткани с необходимой точностью и необходимым пространственным разрешением.
В отличие от наиболее близкого решения заявляемый способ позволяет контролируемо изменять глубину зондирования, величину исследуемого объёма биологической ткани и пространственное разрешение; контролировать силу прижатия и совмещать устройство с роботизированными комплексами; осуществлять спектроскопию с временным разрешением на контролируемых объёмах ткани, получать количественные оценки таких оптических параметров, как коэффициенты поглощения и транспортного рассеяния на разных длинах волн, и проведения количественного анализа состава и структуры исследуемого объёма биологической ткани с необходимой точностью и необходимым пространственным разрешением; получать количественные оценки динамики кровотока в сосудах разного калибра, от микроциркуляторных до магистральных, в исследуемом объёме ткани.
Заявляемое устройство позволяет совмещать диагностические функции устройства с отдельными хирургическими манипуляциями (разъединением тканей и удалением патологических тканей), а также обеспечивает возможность многоканального подведения разных зондирующих сигналов, оптических и/или электрических и других, при необходимости. Заявляемое устройство позволяет изменять его конструкцию за счёт блочно-модульного принципа его построения;
Оптико-хирургическое устройство допускает возможность стерилизации холодным плазменным методом [Корнев И.И. Современные технологии низкотемпературной стерилизации изделий медицинского назначения в ЛПУ. [Электронный ресурс] Режим доступа: http://www.poliklin.ru/imagearticle/201206/29-31.pdf].
Перечисленные выше отличительные признаки заявляемого способа приводят к достижению следующих преимуществ по сравнению с наиболее близким техническим решением:
- к повышению эффективности распознавания нейроваскулярных структур за счёт возможности реализации c помощью предлагаемого устройства способа обнаружения и распознавания нейроваскулярных структур, представленного в RU 2736307, который предусматривает получение и анализ комплекса значимых параметров (оптических, производных, физиологических и параметров формы) в статическом и, при необходимости, в динамическом режимах, и получения более широкого спектра критериев, обеспечивающих определение в т.ч. типа структуры; автоматизированного контроля позиционирования и/или силы прижатия используемого оптоволоконного датчика к поверхности исследуемого объёма биологической ткани, что обеспечивает учёт или отсутствие неинформативных двигательных артефактов и искажений оптических параметров, обеспечивает стабильность и воспроизводимость параметров, по которым на основании соответствующих критериев принимается решение; повышения или обеспечения равномерности зондирования исследуемого объёма биологической ткани;
- к повышению универсальности устройства способа за счёт: блочно-модульного принципа конструкции и возможности смены браншей, т.е. рабочего торца устройства; обеспечения большей инвариантности устройства к расположению нейроваскулярных структур в исследуемом объёме биологической ткани путём применения не менее двух групп излучателей оптоволоконного датчика и анализа интенсивности обратно рассеянного излучения для каждого источника;
- к расширению функциональных возможностей устройства на единой методологической основе за счёт контроля возможного спазмирования артериальных сосудов исследуемого объёма биологической ткани или питающей крупной артерии и степени ишемизации кровоснабжаемых ими биологических тканей с помощью того же устройства;
- повышению качества оказываемой медицинской помощи ввиду снижения или предотвращения нередких в нейрохирургической практике случаев повреждения нейроваскулярных структур и внезапного неконтролируемого спазмирования крупных артерий при случайном резком механическом воздействии на них; на эффективное предупреждение такого рода ситуаций направлен данный способ.
Предлагаемый способ не имеет ограничений, если пространственное разрешение и минимальный зондируемый объём согласованы с характерными размерами нейроваскулярных структур, подлежащих обнаружению и распознаванию, и изменения оптических параметров, значимые для обнаружения и распознавания нейроваскулярных структур, минимум в 2 раза превосходят соответствующую шумовую характеристику.
Проведенные исследования продемонстрировали возможность осуществления изобретения с достижением заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ИНТРАОПЕРАЦИОННОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ НЕЙРОВАСКУЛЯРНЫХ СТРУКТУР В ОБЪЁМЕ БИОЛОГИЧЕСКОЙ ТКАНИ | 2021 |
|
RU2758868C1 |
| СПОСОБ ИНТРАОПЕРАЦИОННОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ НЕЙРОВАСКУЛЯРНЫХ СТРУКТУР В ОБЪЁМЕ БИОЛОГИЧЕСКОЙ ТКАНИ | 2020 |
|
RU2736307C1 |
| ИНФРАКРАСНЫЙ СЕНСОР ДЛЯ АППАРАТНО-ПРОГРАММНОГО КОМПЛЕКСА ИНФРАКРАСНОЙ ДИАФАНОСКОПИИ ТКАНЕЙ РОТОВОЙ ПОЛОСТИ | 2019 |
|
RU2715986C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2003 |
|
RU2238043C1 |
| Устройство для разрушения и удаления хрусталика с набором одноразовых хирургических инструментов | 2023 |
|
RU2820812C1 |
| СПОСОБ СОЗДАНИЯ ГЕМОСТАЗА С ВОЗМОЖНОСТЬЮ ВОССТАНОВЛЕНИЯ КРОВОТОКА В ТРУБЧАТЫХ ЭЛАСТИЧНЫХ СТРУКТУРАХ ОРГАНИЗМА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2485908C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2005 |
|
RU2320276C2 |
| Иглодержатель хирургический | 2021 |
|
RU2764871C1 |
| СПОСОБ ДИСТАНЦИОННОГО БЕСПРОБООТБОРНОГО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ХИМИЧЕСКИХ ВЕЩЕСТВ И ОБЪЕКТОВ ОРГАНИЧЕСКОГО ПРОИСХОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2567119C1 |
| РОТОРНЫЙ КОМПРЕССОР (ВАРИАНТЫ) | 2000 |
|
RU2200253C2 |
Изобретение относится к медицине, а именно к оптико-хирургическим устройствам для обнаружения и распознавания нейроваскулярных структур в объёме биологической ткани. Устройство включает корпус с закрепленными в нем подвижной и неподвижной браншами, блок разведения браншей и оптоволоконный блок. Оптоволоконный блок включает источник излучения в виде, по меньшей мере, одного оптоволокна для подвода оптического сигнала для зондирования биологической ткани и приемник излучения в виде, по меньшей мере, одного оптоволокна для приема обратного сигнала, выполненные с возможностью спектроскопии биологической ткани. Источник и приемник излучения расположены в браншах. Оптоволоконный блок и бранши выполнены с возможностью подповерхностного контактного зондирования биологической ткани оптическим излучением, по меньшей мере, двух длин волн методом отражательной диффузионной спектроскопии. Источники излучения размещены на рабочем торце на одной из бранш, а приемники – на рабочем торце на одной из оставшихся бранш. Источники объединены, по меньшей мере, в две группы, расположенные вдоль отдельных несовпадающих полуосей, направленных от приемника. Каждая группа источников состоит, по меньшей мере, из двух подгрупп, каждая из которых предназначена для подачи сигнала, по меньшей мере, на двух длинах волн. Источники каждой подгруппы расположены друг от друга на расстоянии не более 1 мм. В рабочем состоянии для зондирования билогической ткани при разведенных браншах расстояние от каждой подгруппы источников до соответствующего приемника составляет не менее 5 мм. Достигается обеспечение возможности зондирования биологической ткани на максимальную глубину не менее 5 мм с идентификацией нейроваскулярных структур и возможности изменения глубины зондирования в процессе диагностики при малых габаритах оптико-хирургического устройства. 11 з.п. ф-лы, 11 ил.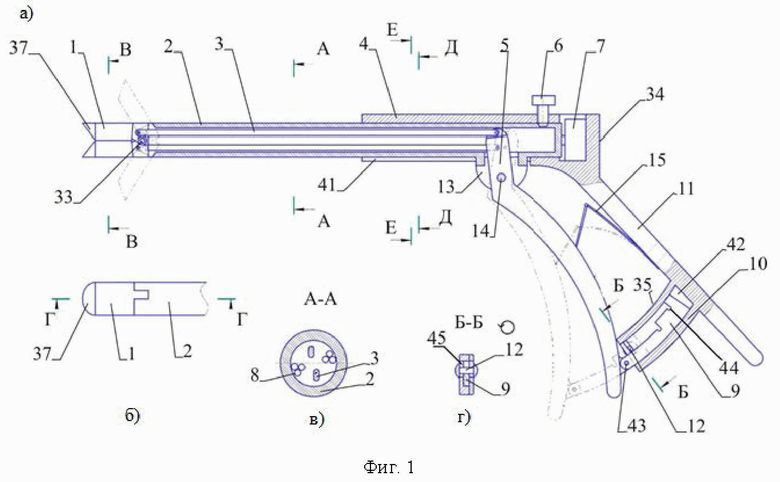
1. Оптико-хирургическое устройство для обнаружения и распознавания нейроваскулярных структур в объёме биологической ткани, включающее корпус с закрепленными в нем, по меньшей мере, одной подвижной и одной неподвижной браншами, или, по меньшей мере, двумя подвижными браншами, блок разведения браншей, оптический или оптоволоконный блок, включающий, по меньшей мере, одно оптоволокно для подвода оптического сигнала для зондирования биологической ткани – источник излучения, и, по меньшей мере, одно оптоволокно или оптоволоконный жгут для приема обратного сигнала – приемник излучения, выполненные с возможностью спектроскопии биологической ткани, при этом источник и приемник излучения расположены в браншах, отличающееся тем, что
оптоволоконный блок и бранши выполнены с возможностью подповерхностного контактного зондирования биологической ткани оптическим излучением, по меньшей мере, двух длин волн (λi, i=1..K, K≥2) методом отражательной диффузионной спектроскопии с временным разрешением на максимальную глубину не менее 5 мм, при этом
бранши со стороны рабочих торцов выполнены со скосами по направлению к продольной оси устройства,
источники излучения размещены на рабочем торце, по меньшей мере, на одной из бранш, а приемники – на рабочем торце, по меньшей мере, на одной из оставшихся бранш,
источники объединены по меньшей мере в две группы, расположенные вдоль отдельных несовпадающих полуосей, направленных от приемника; каждая группа источников состоит, по меньшей мере, из двух подгрупп, каждая из которых предназначена для подачи сигнала, по меньшей мере, на двух длинах волн (λi, i=1..K, K≥2), а источники каждой подгруппы расположены друг от друга на расстоянии не более 1 мм, а каждая подгруппа - на определённом расстоянии (rj, j=1..M, M≥2) от приёмника вдоль соответствующей полуоси; в рабочем состоянии для зондирования билогической ткани при разведенных браншах расстояние от каждой подгруппы источников до соответствующего приемника составляет не менее 5 мм.
2. Устройство по п.1, отличающееся тем, что скосы со стороны рабочих торцов браншей по направлению к продольной оси устройства выполнены под углом α к перпендикуляру, проведенному к продольной оси устройства при сомкнутых браншах, величиной не менее половины среднего угла раскрытия браншей в рабочем состоянии при зондировании биологической ткани и не более половины максимально возможного угла раскрытия браншей.
3. Устройство по п.1, отличающееся тем, что содержит блок контроля силы прижатия браншей к исследуемой биологической ткани, включающий датчик силы, встроенный в корпус.
4. Устройство по п.1, отличающееся тем, что оно снабжено блоком стыковки с внешними устройствами позиционного и/или силового контроля.
5. Устройство по п.1, отличающееся тем, что корпус содержит наружную и внутреннюю направляющие, выполненные с возможностью их регулируемого соосного перемещения относительно друг друга.
6. Устройство по п.1, отличающееся тем, что блок разведения браншей включает подвижный рычаг, подвижно соединенный с корпусом, неподвижную рукоятку корпуса, тяги, жестко соединяющие бранши с подвижным рычагом, и кремальеру, выполненную с возможностью фиксации угла разведения браншей.
7. Устройство по п.6, отличающееся тем, что подвижный рычаг соединен либо с внутренней, либо с наружной направляющей посредством ушка, жестко прикрепленного к соответствующей направляющей, и цилиндрического штифта.
8. Устройство по п.5, отличающееся тем, что внутренняя направляющая выполнена с продольной внутренней полостью для расположения в ней оптоволокон и оптического(их) жгута(ов) и тяг от браншей к рукоятке.
9. Устройство по п.1, отличающееся тем, что оно выполнено с возможностью раскрытия браншей на определенный угол и фиксации браншей в данном положении.
10. Устройство по п.1, отличающееся тем, что бранши имеют режущие кромки и желобки для проведения хирургических манипуляций с биологическими тканями.
11. Устройство по п.1, отличающееся тем, что оно выполнено с возможностью подповерхностного контактного электроимпедансного зондирования биологической ткани и снабжено электродами, выведенными на рабочие торцы браншей с обеспечением возможности осуществления биполярного или тетраполярного режимов, по меньшей мере, одним каналом и, по меньшей мере, на одной частоте из диапазона от 300 Гц до 200 кГц или до 1 МГц, силой тока не более 0,3 мА и плотностью тока, не вызывающей возбуждения нервных и мышечных волокон.
12. Устройство по п.6, отличающееся тем, что оно выполнено с возможностью замены браншей с внутренней направляющей, подвижным рычагом и кремальерой.
| WO 2018229771 A1, 20.12.2018 | |||
| КВАЗИУРАВНОВЕШЕННЫЙ МОСТ ДЛЯ РАЗДЕЛЬНОГО | 0 |
|
SU183278A1 |
| US 5772597 A1, 30.06.1998 | |||
| US 2013267874 A1, 10.10.2013 | |||
| US 20170181797 A1, 29.06.2017. | |||

