Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения одного пассивного двухлучевого инфракрасного средства обнаружения на участке дороги для обнаружения нарушителя, и распознавания его типа.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся сети троп и дорог. Важным для сил реагирования является не только знание факта нарушения и направления движения нарушителя, но и его типа (пеший или на транспортном средстве), позволяющее правильно оценить возможные диапазон скоростей нарушителя, характер его действий и на основе полученных данных выбрать наиболее рациональные решения по его поиску и последующему задержанию [1].
Для сигнализационного прикрытия сети троп и дорог широко применяются пассивные инфракрасные средства обнаружения (СО) с двухлучевой зоной обнаружения (ЗО) длиной (L) до 50 метров (фиг. 1). Анализ СО, применяемых для охраны участков местности, зарубежного производства («Rembass», «Rembass 2» - США, CLASSIC - Великобритания др.) и отечественного (РС-ИК - «Полюс-СТ», Радий БРК-ИК - «Umirs», Мангуст - «Стилсофт» и др.) показывает, что в них используется типовой пироэлектрический преобразователь состоящий из двух дифференциально включенных полусегментов (DUAL), геометрические размеры ЗО и основные характеристики этих средств имеют близкие друг к другу значения [2-6].
Известен способ распознавания типа нарушителя инфракрасным средством обнаружения, заключающийся в установке одного СО у дороги на расстоянии не менее 40% от максимальной длины зоны обнаружения (ЗО) так, чтобы ее ширина в месте пересечения с дорогой составляла не менее 1 метра; ориентировании СО так, чтобы ось его двухлучевой ЗО пересекала участок дороги под углом 90 градусов; переходе СО в режим тревоги при пересечении нарушителем его двухлучевой ЗО; записи СО полезного сигнала в течение всего времени его нахождения в режиме тревоги; применении в СО алгоритма определения типа нарушителя по форме полезного сигнала: первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО, имеет один локальный максимум или минимум - пеший нарушитель, первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО, имеет два локальных максимума или минимума - нарушитель на колесном транспортном средстве; передаче СО информации о типе нарушителя - пеший нарушитель или нарушитель на транспортном средстве на ССОИ; обеспечении регистрации ССОИ сигнала тревоги и информации о типе нарушителя от СО [7].
Известный способ имеет незначительную ошибку при пересечении участка ЗО СО транспортными средствами, профиль которых близок к вытянутой прямоугольной форме между колесными осями - более 4 метров (фиг. 2). В свою очередь, при пересечении участка ЗО СО транспортными средствами, имеющими профиль существенно отличающийся от вытянутой прямоугольной формы между колесными осями: пикап, трехдверные внедорожники и т.п., ошибка распознавания достаточно высокая (фиг. 3).
Известно, что в основе сигналообразования в ПИКСО лежит регистрация изменения суммарного теплового потока от объекта и фона находящихся внутри ЗО СО [2, 3]. Авторами отмечается, что если в ЗО СО движется объект, неравномерно нагретый по своей длине, то процесс сигналообразования будет значительно изменяться. Что в свою очередь влияет на получение двух локальных максимумов в первом импульсе полезного сигнала, который является главным признаком лежащим в основе распознавания типа нарушителя в известном способе (фиг. 4) [7]. Так, если ЗО СО будет пересекать автомобиль с формой профиля кузова близкой к вытянутой прямоугольной, результат будет близким к описанному в способе распознавания типа нарушителя инфракрасным средством обнаружения (фиг. 4) [7].
Если ЗО СО будет пересекать автомобиль с формой профиля кузова значительно отличающейся от вытянутой прямоугольной от одной колесной оси к другой, то колебания теплового контраста, возникающие за счет попадания в зону обнаружения верхней части, значительно отличающейся от нижней части профиля, могут помешать формированию двух локальных максимумов в первом импульсе полезного сигнала (фиг. 1, 3, 5).
Целью изобретения является получение возможности распознавания типа нарушителя, обнаруженного двухлучевым пассивным инфракрасным средством обнаружения, с минимальной ошибкой распознавания, независимо от формы профиля транспортного средства.
Для достижения поставленной цели разработан способ определения границ и размеров участка зоны обнаружения пассивного инфракрасного средства обнаружения, применяемого для обнаружения и распознавания типа нарушителя, заключающийся в установке одного пассивного инфракрасного средства обнаружения на высоту 0,3 метра от уровня земли у дороги на расстоянии не менее 40% от максимальной длины зоны обнаружения (ЗО) так, чтобы ее ширина в месте пересечения с дорогой составляла не менее 1 метра; ориентировании оптической оси двухлучевой ЗО СО под такими горизонтальным и вертикальным углами, чтобы ее проекция в горизонтальной плоскости пересекала участок дороги под углом 90 градусов, а нижняя граница двухлучевой ЗО СО находилась параллельно уровню земли; переходе СО в режим тревоги при пересечении нарушителем его двухлучевой ЗО СО; записи СО полезного сигнала в течение всего времени его нахождения в режиме тревоги; применении в СО алгоритма определения типа нарушителя по форме полезного сигнала: первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО СО, имеет один локальный максимум или минимум - пеший нарушитель, первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО, имеет два локальных максимума или минимума - нарушитель на колесном транспортном средстве; передаче СО информации о типе нарушителя - пеший нарушитель или нарушитель на транспортном средстве на систему сбора и обработки информации (ССОИ); обеспечении регистрации ССОИ сигнала тревоги и информации о типе нарушителя от СО.
В известных способах применения ПИКСО рекомендуется устанавливать СО на высоте 0,7-0,9 метра от уровня земли [4-6]. Такие высота установки СО, форма и размеры ЗО СО позволяют существенно снизить резкое падение чувствительности СО к концу его ЗО. Так, падение чувствительности к изменению теплового контраста, вносимого человеком, пересекающим ЗО СО ближе к ее концу, снижается (компенсируется) за счет увеличения поперечных размеров ЗО СО. Ее нижняя граница проходит по уровню земли (где находится нижняя часть тела человека, включая стопы), верхняя граница находится практически на уровне роста человека (фиг. 1) [4-6]. Т.е. в известных способах высотой установки (0,7-0,9 метра) и ориентированием оси ЗО параллельно поверхности земли при заданном пороге срабатывания обеспечивается требуемая вероятность обнаружения в конце ЗО СО [4-6].
Авторами отмечается, что для известного способа распознавания типа нарушителя инфракрасным средством обнаружения обеспечение максимальной вероятности обнаружения нарушителя-человека в конце ЗО СО не является приоритетным, так как способ применяется для охранного мониторинга дорог и в нем используется только средняя часть ЗО СО [7].
Так же авторами отмечается, что вытянутая прямоугольная форма профиля между колесными осями у большинства транспортных средств, независимо от формы их кузова, находится на высоте до 1 метра (фиг. 3).
Обеспечить относительно равномерный тепловой контраст, регистрируемый СО между передней и задней колесной парой, а значит снизить вероятность ошибки распознавания, предлагается за счет ориентирования ЗО СО над дорогой с расчетом обнаружения транспортного средства по конкретной, условно выделенной его части 7: нижняя граница - порог кузова, верхняя граница - по капоту (фиг. 3).
Указанная часть у большинства легковых машин (фиг. 2, 3) близка к вытянутой прямоугольной и имеет между колесными осями достаточно равномерный прогрев, что исключает серьезное влияние на нежелательный рост или падение амплитуды импульса, когда автомобиль по всей длине кузова находится в ЗО. Верхняя часть профиля автомобиля, наиболее отличная от прямоугольной формы, а потому дающая разный температурный контраст по длине от одной колесной оси к другой, оказывается вне границ ЗО, а значит не будет влиять на результат сигналообразования (фиг. 3, 6).
Для обеспечения полного перекрытия ЗО СО частью 7 транспортного средства, имеющей наиболее равномерный прогрев, необходимо установить СО на высоту 0,3 метра от уровня земли и оптическую ось двухлучевой ЗО СО установить под вертикальным углом, при котором нижняя граница двухлучевой ЗО СО находилась бы параллельно уровню земли (фиг. 6). Так, с учетом удаления СО от участка 5 дороги на расстояние Н высота до верхней границы ЗО СО на протяжении всей ширины дороги, составляющей около 8 метров, не превышает высоту части 7 транспортного средства, которая полностью перекрывает в вертикальной плоскости ЗО СО. Для того чтобы нижняя граница ЗО СО оказалась параллельно уровню земли, необходимо ее оптическую 3 ось сориентировать под вертикальным углом V, что можно сделать с применением оптического визира с вертикальной угловой сеткой. Это угол соответствует половине угла обзора СО (α) по вертикали, который указывается в тактико-технических характеристиках каждого СО (фиг. 6).

где V - вертикальный угол ориентирования оптической оси относительно уровня земли, градусов;
α - угол обзора СО по вертикали, градусов.
Анализ характеристик СО, применяемых для охраны участков местности, показывает, что значение вертикального угла обзора является одинаковым для большинства СО, его значение лежит в пределах 3 градусов [4-6].
Способ определения границ и размеров участка зоны обнаружения пассивного инфракрасного средства обнаружения, применяемого для обнаружения нарушителя, и распознавания его типа включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Установка средства 1 обнаружения, включающего в себя: систему 8 оптическую, пироприемник 9, усилитель 10, формирователь 11 сигналов тревог, интерфейс 12 сигнальный, устройство 13 памяти, устройство 14 решающее на высоту 0,3 метра от уровня 2 земли на расстоянии Н от участка 5 дороги (фиг. 6, 8).
2. Ориентирование оптической 3 оси к участку 5 дороги под горизонтальным углом 90 градусов, а к уровню 2 земли под вертикальным углом V, обеспечивающим прохождение нижней границы параллельно уровню земли (фиг. 6).
3. Запись в устройство 14 решающее алгоритма определения типа нарушителя.
4. Начало работы средства 1 обнаружения в дежурном режиме.
Основной этап начинается при движении нарушителя через контролируемый участок дороги и попадании его в ЗО средства 1 обнаружения, он включает:
1. Формирование полезного сигнала пироприемником 9, усиление сигнала усилителем 10 и поступление сигнала на вход формирователя 11 сигналов тревог (фиг. 8).
2. Формирование сигнала тревоги формирователем 11 сигналов тревог и запись устройством 13 памяти импульсов полезного сигнала, сформированных пироприемником 9.
3. Определение устройством 14 решающим количества локальных максимумов или минимумов в первом импульсе полезного сигнала и принятие решения о типе нарушителя, пересекшего ЗО:
- если первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО, имеет один локальный максимум или минимум, то тип нарушителя - пеший нарушитель;
- если первый импульс полезного сигнала, сформированного при пересечении нарушителем 30, имеет два локальных максимума или минимума, то тип нарушителя - нарушитель на колесном транспортном средстве.
4. Передача средством 1 обнаружения через интерфейс 12 сигнальный сигнала тревоги и информации о типе нарушителя системе 15 сбора и обработки информации (фиг. 8).
5. Прием системой 15 сбора и обработки информации от интерфейса 12 сигнального сигнала тревоги и информации типе нарушителя (фиг. 8).
6. Обнуление устройства 13 памяти (фиг. 8).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания двухлучевого пассивного инфракрасного средства обнаружения в известном способе распознавания типа нарушителя инфракрасным средством обнаружения (вид сбоку);
- фиг. 2 - профиль колесного транспортного средства, имеющего форму близкую к вытянутой прямоугольной между колесными осями;
- фиг. 3 - профиль колесного транспортного средства, имеющего форму существенно отличную от вытянутой прямоугольной между колесными осями;
- фиг. 4 - форма полезного сигнала от автомобиля с двумя локальными максимумами;
- фиг. 5 - форма полезного сигнала от автомобиля без локальных максимумов;
- фиг. 6 - схема развертывания двухлучевого пассивного инфракрасного средства обнаружения в предлагаемом способе (вид сбоку);
- фиг. 7 - таблица обеспечения требуемых условий минимального расстояния до дороги и равномерного теплового контраста между колесными осями внутри зоны обнаружения в зависимости от расстояния между средством обнаружения и дорогой;
- фиг. 8 - структурная схема взаимосвязи применяемых устройств при реализации предлагаемого способа.
Технический результат заключается в получении возможности распознавания типа нарушителя, обнаруженного двухлучевым пассивным инфракрасным средством обнаружения, с минимальной ошибкой распознавания, независимо от формы профиля транспортного средства.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Груба, И. Системы охранной сигнализации. Технические средства обнаружения / И. Груба. - М.: Солон-пресс, 2012. - 220 с.
3. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
4. РСК «Радиобарьер-МФ». Руководство по эксплуатации ПМЕК.424242.9000РЭ - М.: «Полюс-СТ», 2011. - 65 с.
5. Быстроразворачиваемый комплекс «Радий - БРК». Руководство по эксплуатации ЮСДП.425149.001РЭ - Пенза: «ЮМИРС», 2013. - 41 с.
6. Мобильный комплекс охраны участка местности «Мангуст». Руководство по эксплуатации СТВФ.425624.001 РЭ - Ставрополь: «Стилсофт», 2017. - 52 с.
7. Пат. 2712648 Российская Федерация, МПК 51 G08B 13/19 Способ распознавания типа нарушителя инфракрасным средством обнаружения / С.А. Удот, И.Д. Соболь - №2019114471; заявл. 08.05.19; опубл. 30.01.20, Бюл. №4.
Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения одного пассивного двухлучевого инфракрасного средства обнаружения на участке дороги для обнаружения нарушителя и распознавания его типа. Техническим результатом является уменьшение ошибки распознавания типа нарушителя, независимо от формы профиля транспортного средства. Способ заключается в установке одного пассивного инфракрасного средства обнаружения (СО) на высоту 0,3 метра от уровня земли у дороги на расстоянии не менее 40% от максимальной длины зоны обнаружения (ЗО) так, чтобы ее ширина в месте пересечения с дорогой составляла не менее 1 метра. Оптическую ось двухлучевой ЗО СО ориентируют под такими горизонтальным и вертикальным углами, чтобы ее проекция в горизонтальной плоскости пересекала участок дороги под углом 90 градусов, а нижняя граница двухлучевой ЗО СО находилась параллельно уровню земли. При пересечении нарушителем двухлучевой ЗО СО последнее переходит в режим тревоги, в течение времени нахождения в котором производят запись полезного сигнала СО. Далее в СО применяют алгоритм определения типа нарушителя по форме полезного сигнала: если первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО СО, имеет один локальный максимум или минимум - пеший нарушитель, если первый импульс полезного сигнала, сформированного при пересечении нарушителем ЗО СО, имеет два локальных максимума или минимума - нарушитель на колесном транспортном средстве. Информацию о типе нарушителя СО передает на систему сбора и обработки информации (ССОИ), которая регистрирует сигнал тревоги и информацию о типе нарушителя от СО. 8 ил.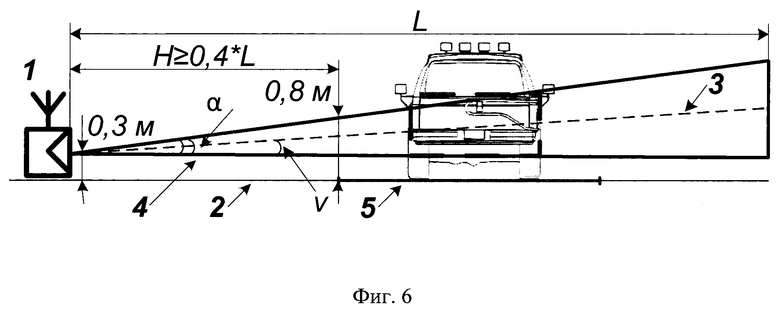
Способ определения границ и размеров участка зоны обнаружения пассивного инфракрасного средства обнаружения, применяемого для обнаружения и распознавания типа нарушителя, заключающийся в установке одного пассивного инфракрасного средства обнаружения у дороги на расстоянии не менее 40% от максимальной длины двухлучевой зоны обнаружения так, чтобы ее ширина в месте пересечения с дорогой составляла не менее 1 метра; ориентировании пассивного инфракрасного средства обнаружения так, чтобы ось его двухлучевой зоны обнаружения пересекала участок дороги под углом 90 градусов; переходе средства обнаружения в режим тревоги при пересечении нарушителем его двухлучевой зоны обнаружения; записи средством обнаружения полезного сигнала в течение всего времени его нахождения в режиме тревоги; применении в средстве обнаружения алгоритма определения типа нарушителя по форме полезного сигнала: первый импульс полезного сигнала, сформированного при пересечении нарушителем зоны обнаружения, имеет один локальный максимум или минимум - пеший нарушитель, первый импульс полезного сигнала, сформированного при пересечении нарушителем зоны обнаружения, имеет два локальных максимума или минимума - нарушитель на колесном транспортном средстве; передаче средством обнаружения информации о типе нарушителя - пеший нарушитель или нарушитель на транспортном средстве на систему сбора и обработки информации; обеспечении регистрации системой сбора и обработки информации сигнала тревоги и информации о типе нарушителя от средства обнаружения, отличающийся тем, что средство обнаружения устанавливается на высоту 0,3 метра от уровня земли; оптическая ось двухлучевой зоны обнаружения средства обнаружения ориентируется под вертикальным углом, при котором нижняя граница двухлучевой зоны обнаружения средства обнаружения находится параллельно уровню земли.
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА НАРУШИТЕЛЯ ИНФРАКРАСНЫМ СРЕДСТВОМ ОБНАРУЖЕНИЯ | 2019 |
|
RU2712648C1 |
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2017 |
|
RU2645548C1 |
| Мобильная система тревожной сигнализации | 2019 |
|
RU2712108C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ПАССИВНОГО ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ОБНАРУЖЕНИЯ ИНФРАКРАСНОГО ДИАПАЗОНА | 2018 |
|
RU2695410C1 |
| Способ получения сульфоновых кислот, обладающих эмульгирующими и моющими свойствами | 1927 |
|
SU13153A1 |
| US 4364030 A, 14.12.1982 | |||
| US 2005151647 A1, 14.07.2005 | |||
| KR 20160135925 A, 29.11.2016. | |||

