Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля изгиба дороги одним линейным радиоволновым средством обнаружения (СО), когда требуется распознавание типа обнаруженного нарушителя (транспортное средство или пеший нарушитель) и определение направления его движения.
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. [1] Для ее контроля широко применяются линейные радиоволновые средства обнаружения характеризующиеся протяженной зоной обнаружения (ЗО) - от 50 до 200 метров. [2, 3] Вместе с тем, для эффективного решения задачи упреждения действий и задержания обнаруженного СО нарушителя, силам реагирования важно обладать информацией о его типе (транспортное средство или пеший нарушитель) и направлении движения.
Наиболее часто встречаемым элементом дорожной сети является изгиб дороги (дугообразный поворот, искривление дороги - состоящие из двух смежных прямых участков дороги соединенных круговой кривой).
Наиболее близким к предлагаемому способу является известный способ охранного мониторинга с применением линейного радиоволнового средства обнаружения. [4] Способ заключается в контроле изгиба дороги одним СО, в котором приемник (ПРМ) и передатчик (ПРД) разворачиваются с противоположных сторон от точки изгиба дороги так, чтобы ЗО средства пересекала дорогу на двух участках; расстояние от ПРМ до ближайшего к нему участка не превышало 10 метров; расстояние от ПРД до ближайшего к нему участка превышало половину расстояния ПРМ - ПРД не более чем на 10 метров; различии площадей сечения первой зоны Френеля на участках: площадь сечения на участке ближайшем к ПРМ не менее чем в два раза меньше площади сечения на ближайшем к ПРД участке; формировании ПРМ сигнала тревоги дважды при движении нарушителя через изгиб дороги; записи ПРМ средства обоих уровней полезных сигналов тревоги в течение всей длительности режимов тревоги; применении алгоритма, определяющего направление движения нарушителя: со стороны ПРМ в сторону ПРД или со стороны ПРД в сторону ПРМ по значению отношения уровня полезного сигнала поступившего первым к уровню полезного сигнала поступившего вторым (больше единицы или меньше единицы); установлении максимального значения времени накопления сигналов тревог исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой; передаче ПРМ СО на систему сбора и обработки информации (ССОИ) сигнала о направлении движения нарушителя.
Известен другой способ охранного мониторинга с применением линейных радиоволновых средств обнаружения, заключающийся в контроле изгиба дороги двумя СО, развернутыми на его смежных дорогах; поочередным формированием сигналов тревоги средствами с задержкой по времени и их передача на ССОИ при последовательном пересечении их зон обнаружения нарушителем; приеме ССОИ двух сигналов тревоги и записи времени задержки между ними; расчете ССОИ скорости движения обнаруженного нарушителя по известному расстоянию между участками пересечения зон обнаружения средств с дорогами и времени задержки между поступившими сигналами тревоги; применении в ССОИ алгоритма распознавания типа обнаруженного на изгибе дороги нарушителя (транспортное средство или пеший нарушитель) и определения направления его движения на основе анализа очередности поступления сигналов тревог от средств обнаружения и сопоставления рассчитанной скорости движения со значениями, характерными для транспортного средства или пешего нарушителя (фиг. 1, 2).
Первый указанный способ определяет направление движения обнаруженного на изгибе дороги нарушителя, но не распознает его тип.
Второй указанный способ распознает тип обнаруженного на изгибе дороги нарушителя (транспортное средство или пеший нарушитель) и определяет направление его движения, но требует для своей реализации использования двух СО.
Целью изобретения является получение возможности распознавания типа обнаруженного на изгибе дороги нарушителя и определения направления движения пешего нарушителя с применением одного СО.
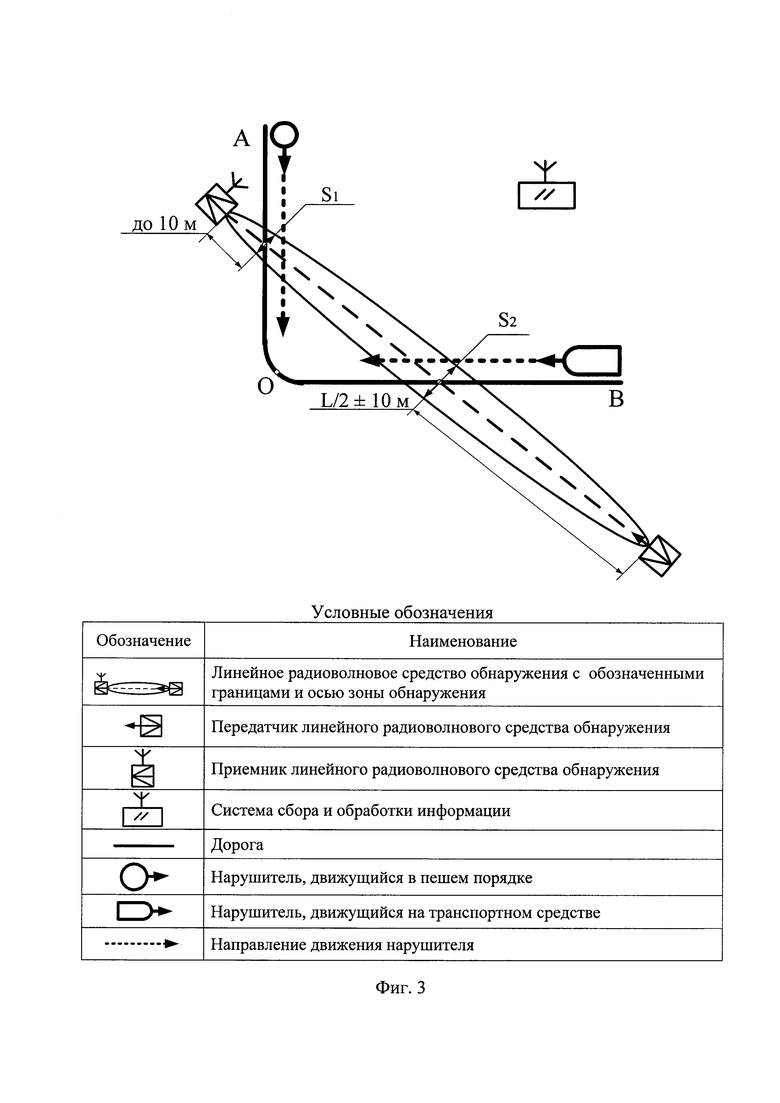
Для достижения поставленной цели разработан способ охранного мониторинга дороги линейным радиоволновым средством обнаружения, заключающийся в контроле изгиба дороги одним СО, в котором ПРМ и ПРД разворачиваются с противоположных сторон от точки изгиба дороги так, чтобы 30 средства пересекала дорогу на двух участках; расстояние от ПРМ до ближайшего к нему участка не превышало 10 метров; расстояние от ПРД до ближайшего к нему участка превышало половину расстояния ПРМ - ПРД не более чем на 10 метров; различии площадей сечения первой зоны Френеля на участках: площадь сечения на участке ближайшем к ПРМ не менее чем в два раза меньше площади сечения на ближайшем к ПРД участке; выделении полезного сигнала с большой глубиной модуляции и отрицательным знаком, который регистрируется блоком большого порога ПРМ средства при пересечении участка 30 ближайшего к ПРМ нарушителем любого типа; зависимости знака и глубины модуляции выделяемого полезного сигнала и блоков, его регистрирующих при пересечении участка ЗО, ближайшего к ПРД, от типа нарушителя: при пересечении участка пешим нарушителем выделяется полезный сигнал с малой глубиной модуляции и отрицательным с положительными знаками, который регистрируется блоками малого и положительного порогов ПРМ средства; при пересечении участка транспортным средством выделяется полезный сигнал с большой глубиной модуляции и отрицательным знаком, который регистрируется блоком большого порога ПРМ средства; формировании и передаче ПРМ на ССОИ при движении нарушителя через изгиб дороги двух сигналов тревоги вместе с информацией о блоках порога; применении в ССОИ алгоритма, распознающего обнаруженного нарушителя как транспортное средство, если дважды поступила информация только о блоке большого порога; распознающего обнаруженного нарушителя как пешего в случае, если поступила информация о разных блоках порога; определяющего направление движения пешего нарушителя по очередности поступления информации о блоках порога с учетом известной схемы развертывания СО (фиг. 3, 4).
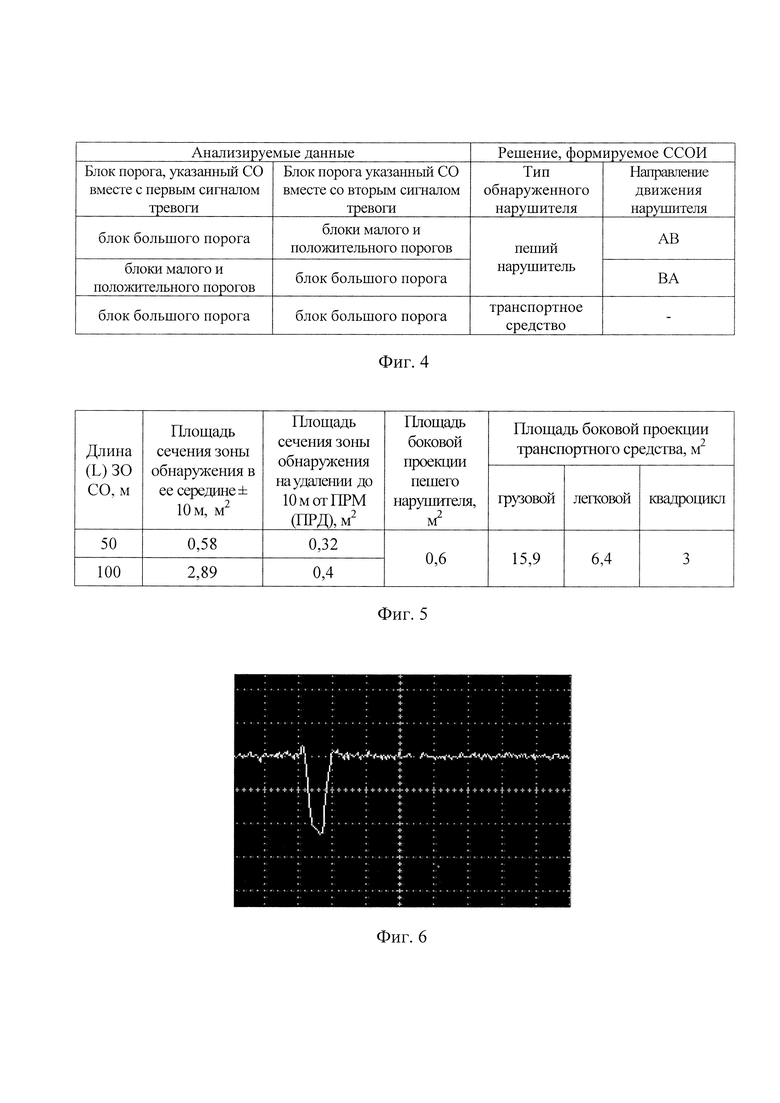
Известно, что параметры полезного сигнала (знак и глубина модуляции), выделяемого при пересечении 30 нарушителем зависят от отношения размеров нарушителя (площади боковой проекции) к размерам зоны обнаружения (площади сечения) в месте ее пересечения, т.е. - степени перекрытия 30 нарушителем. Вследствие того, что ЗО средства имеет эллипсоидную форму, площадь ее сечения минимальна вблизи ПРМ (ПРД) (S1) и максимальна в середине (S2). По сравнению с транспортным средством (SТС) она всегда меньше, а в случае с пешим нарушителем (SV) - ее размеры меньше вблизи ПРМ (ПРД) и больше в середине ЗО (фиг.5): [5]

где S1 - площадь сечения зоны обнаружения вблизи ПРМ (ПРД) средства, м2;
S2 - площадь сечения зоны обнаружения в ее середине, м2;
SЧ - площадь боковой проекции пешего нарушителя, м2;
SТС - площадь боковой проекции транспортного средства, м2.
При превышении размеров нарушителя размеров ЗО (отношение более единицы - значительная степень перекрытия) в месте ее пересечения, выделяемый полезный сигнал имеет большую глубину модуляции и отрицательный знак (фиг. 6). В случае, когда размеры ЗО превышают размеры нарушителя (отношение значительно меньше единицы - малая степень перекрытия), выделяемый полезный сигнал имеет малую глубину и отрицательный с положительными знаки (фиг. 7). [6]
Регистрация полезного сигнала в зависимости от его параметров (знака и глубины модуляции) осуществляется разными блоками порогового уровня ПРМ средства:
- блоком большого порога, когда полезный сигнал имеет большую глубину модуляции и отрицательный знак;
- блоками малого и положительного порогов, когда полезный сигнал имеет малую глубину и отрицательный с положительными знаки.
Исходя из выражения (1), с учетом схемы развертывания ЗО средства в предложенном способе:
- при движении через изгиб дороги транспортного средства, его размеры всегда превышают размеры 30, независимо от места ее пересечения -выделенный полезный сигнал всегда имеет большую глубину модуляции с отрицательным знаком и всегда регистрируется блоком большого порога ПРМ средства;
- при движении через изгиб дороги пешего нарушителя и пересечения им участка 30 ближайшего к ПРМ, его размеры превышают размеры ЗО - выделенный полезный сигнал имеет большую глубину модуляции с отрицательным знаком и регистрируется блоком большого порога ПРМ средства;
- при движении через изгиб дороги пешего нарушителя и пересечения им участка ЗО ближайшего к ПРД, его размеры меньше размеров ЗО - выделенный полезный сигнал имеет малую глубину модуляции с отрицательным с положительным знаками и регистрируется блоками малого и положительного порогов ПРМ средства.
Сигналы тревоги, формируемые ПРМ средства передаются на ССОИ вместе с информацией о блоках (блоке) порога, зарегистрировавших полезный сигнал. В ССОИ применяется алгоритм (фиг. 4):
- распознающий обнаруженного нарушителя как транспортное средство, если дважды поступила информация только о блоке большого порога;
- распознающий обнаруженного нарушителя как пешего, если последовательно поступила информация о разных блоках порога (большого порога, малого и положительного порогов);
- определяющий направление движения пешего нарушителя по очередности поступления информации о блоках порога с учетом известной схемы развертывания СО: с первым сигналом тревоги поступила информация о блоке большого порога, а со вторым о блоках малого и положительного порогов: нарушитель движется по направлению АВ; если информация о блоках порога, поступает в обратном порядке: нарушитель движется по направлению ВА (фиг. 4).
Способ включает два этапа: подготовительный и основной. Подготовительный этап:
1. Развертывание на изгибе дороги по установленной схеме средства обнаружения, включающего в себя: передатчик 3 и приемник, состоящий из усилителя 4, полосового 5 фильтра, детектора 6, блока 7 большого порога, выходного 8 интерфейса, блока 9 малого порога, блока 10 положительного порога (фиг. 3, 8).
2. Развертывание на местности системы 11 сбора и обработки информации (фиг. 8).
3. Запись в систему 1 сбора и обработки информации алгоритма принятия решения (фиг. 4).
Основной этап начинается при движении нарушителя через изгиб дороги и попадании его в ЗО средства, он включает в себя:
1. Выделение детектором 6 из сигнала, поступившего на вход приемника, усиленного усилителем 4 и отфильтрованного полосовым 5 фильтром полезного сигнала (фиг. 8).
2. Анализ глубины и знака модуляции полезного сигнала, поступившего с детектора 6 на блоки 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 8).
3. При движении транспортного средства регистрация полезного сигнала с большой глубиной модуляции и отрицательным знаком блоком 7 большого порога (фиг. 6, 8).
4. При движении пешего нарушителя в направлении АВ регистрация полезного сигнала с большой глубиной модуляции и отрицательным знаком блоком 7 большого порога (фиг. 6, 8).
5. При движении пешего нарушителя в направлении В А регистрация полезного сигнала с малой глубиной модуляции и отрицательным с положительным знаками блоками 9 малого и 10 положительного порогов (фиг. 7, 8).
6. Формирование и передача ПРМ первого сигнала тревоги с указанием блоков (блока) порога, зарегистрировавших полезный сигнал выходным 8 интерфейсом на систему 11 сбора и обработки информации (фиг. 8).
7. Прием системой 11 сбора и обработки информации первого сигнала тревоги (фиг. 8).
8. Выход нарушителя из 30 средства, формирование ПРМ СО дежурного сигнала и передача его на систему 11 сбора и обработки информации (фиг. 8).
8. Второе по счету пересечение ЗО средства нарушителем.
9. Выделение детектором 6 из сигнала, поступившего на вход приемника, усиленного усилителем 4 и отфильтрованного полосовым 5 фильтром полезного сигнала (фиг. 8).
10. Анализ глубины и знака модуляции полезного сигнала, поступившего с детектора 6 на блоки 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 8).
11. При движении транспортного средства регистрация полезного сигнала с большой глубиной модуляции и отрицательным знаком блоком 7 большого порога (фиг. 6, 8).
12. При движении пешего нарушителя в направлении АВ регистрация полезного сигнала с малой глубиной модуляции и отрицательным с положительным знаками блоками 9 малого и 10 положительного порогов (фиг. 7, 8).
13. При движении пешего нарушителя в направлении ВА регистрация полезного сигнала с большой глубиной модуляции и отрицательным знаком блоком 7 большого порога (фиг. 6, 8).
14. Формирование и передача ПРМ второго по счету сигнала тревоги с указанием блоков (блока) порога, зарегистрировавших полезный сигнал выходным 8 интерфейсом на систему 11 сбора и обработки информации (фиг. 8).
15. Прием системой 11 сбора и обработки информации второго сигнала тревоги (фиг. 8).
16. Распознавание системой 11 сбора и обработки информации типа обнаруженного нарушителя (фиг. 4, 8):
- если дважды поступила информация только о блоке большого порога - нарушитель транспортное средство;
- если последовательно поступила информация о разных блоках порога (большого порога, малого и положительного порогов).
17. В случае движения пешего нарушителя определение системой 11 сбора и обработки информации направления его движения (фиг. 3, 4, 8):
- если с первым сигналом тревоги поступила информация о блоке большого порога, а со вторым о блоках малого и положительного порогов: нарушитель движется по направлению АВ;
- если с первым сигналом тревоги поступила информация о блоках малого и положительного порогов, а со вторым о блоке большого порога: нарушитель движется по направлению ВА.
18. Обнуление памяти системы 1 сбора и обработки информации (фиг. 8).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания двух линейных радиоволновых средств обнаружения в известном способе охранного мониторинга;
- фиг. 2 - таблица принятия решения (алгоритм) о типе и направлении движения обнаруженного нарушителя в известном способе с двумя линейными радиоволновыми средствами обнаружения;
- фиг. 3 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе;
- фиг. 4 - таблица принятия решения (алгоритм) о типе обнаруженного нарушителя и направлении движения пешего нарушителя в предлагаемом способе;
- фиг. 5 - таблица соотношения площади сечения первой зоны Френеля зоны обнаружения типового линейного радиоволнового средства обнаружения и площадей силуэтов нарушителей разных типов;
- фиг. 6 - эпюр выделенного приемником полезного сигнала при пересечении зоны обнаружения транспортным средством на любом участке или пешим нарушителем на участке, ближайшем к приемнику;
- фиг. 7 - эпюр выделенного приемником полезного сигнала при пересечении зоны обнаружения пешим нарушителем на участке, ближайшем к передатчику;
- фиг. 8 - структурная схема взаимосвязи применяемых устройств при реализации предлагаемого способа.
Технический результат заключается в возможности распознавания типа обнаруженного на изгибе дороги нарушителя и определения направления движения пешего нарушителя с применением одного СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов, Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А. В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Пат. 2645598 Российская Федерация, МПК 51 G08B 13/00. Способ охранного мониторинга с применением линейного радиоволнового средства обнаружения / С.А. Удот., А.В. Рубаник - №2017103278; заявл. 31.01.17; опубл. 21.02.18, Бюл. №6.
5. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
6. Долуханов, М.П. Распространение радиоволн: Учебник - М.: Связьиздат, 1960. - 391 с.


Изобретение относится к области охранного мониторинга местности. Технический результат заключается в распознавании типа обнаруженного на изгибе дороги нарушителя и определении направления движения пешего нарушителя с применением одного средства обнаружения. Технический результат достигается за счет охранного мониторинга дороги линейным радиоволновым средством обнаружения, вместе с сигналами тревоги на систему сбора и обработки информации передается информация о блоках порога приемника средства обнаружения, зарегистрировавших полезный сигнал, в системе сбора и обработки информации применяется алгоритм, распознающий обнаруженного нарушителя как транспортное средство, если дважды поступила информация только о блоке большого порога приемника средства обнаружения, распознающий обнаруженного нарушителя как пешего в случае, если последовательно поступила информация о разных блоках порога приемника средства обнаружения, определяющий направления движения пешего нарушителя по очередности поступления информации о блоках порога приемника средства обнаружения с учетом известной схемы развертывания средства обнаружения. 8 ил.
Способ охранного мониторинга дороги линейным радиоволновым средством обнаружения, заключающийся в контроле изгиба дороги одним средством обнаружения, в котором приемник и передатчик разворачиваются с противоположных сторон от точки изгиба дороги так, чтобы зона обнаружения средства обнаружения пересекала дорогу на двух участках; расстояние от приемника до ближайшего к нему участка не превышало 10 метров; расстояние от передатчика до ближайшего к нему участка превышало половину расстояния приемник - передатчик не более чем на 10 метров; различии площадей сечения первой зоны Френеля на участках: площадь сечения на участке, ближайшем к приемнику, не менее чем в два раза меньше площади сечения на ближайшем к передатчику участке; формировании приемником двух сигналов тревоги при движении нарушителя через изгиб дороги и передаче их на систему сбора и обработки информации; обеспечении приема системой сбора обработки информации сигналов тревоги, отличающийся тем, что при пересечении участка зоны обнаружения, ближайшего к приемнику, нарушителем любого типа выделяется полезный сигнал с большой глубиной модуляции с отрицательным знаком, который регистрируется блоком большого порога приемника средства обнаружения; при пересечении участка зоны обнаружения, ближайшего к передатчику, знак и глубина модуляции выделяемого полезного сигнала и блоки (блок), его регистрирующие, зависят от типа нарушителя: при пересечении участка пешим нарушителем выделяется полезный сигнал с малой глубиной модуляции и отрицательным с положительными знаками, который регистрируется блоками малого и положительного порогов приемника средства обнаружения; при пересечении участка транспортным средством выделяется полезный сигнал с большой глубиной модуляции и отрицательным знаком, который регистрируется блоком большого порога приемника средства обнаружения; вместе с сигналами тревоги на систему сбора и обработки информации передается информация о блоках порога приемника средства обнаружения, зарегистрировавших полезный сигнал; в системе сбора и обработки информации применяется алгоритм, распознающий обнаруженного нарушителя как транспортное средство, если дважды поступила информация только о блоке большого порога приемника средства обнаружения; распознающий обнаруженного нарушителя как пешего в случае, если последовательно поступила информация о разных блоках порога приемника средства обнаружения; определяющий направление движения пешего нарушителя по очередности поступления информации о блоках порога приемника средства обнаружения с учетом известной схемы развертывания средства обнаружения.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 7084761 B2, 01.08.2006 | |||
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2621179C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2645598C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2016 |
|
RU2626742C1 |

