Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля дороги одним линейным радиоволновым средством обнаружения (СО), когда требуется распознавание способа передвижения обнаруженного на дороге нарушителя (в пешем порядке или на транспортном средстве).
Линейные радиоволновые средства обнаружения характеризуются протяженной зоной обнаружения (ЗО) - от 50 до 100 метров и используются в большинстве случаев для контроля отдельных рубежей, на которых вероятно появление нарушителей [1, 2]. Передвижение нарушителя возможно как в пешем порядке, так и на транспортном средстве (автомобиль, квадроцикл, мотоцикл и др.). Знание способа передвижения обнаруженного нарушителя позволяет силам реагирования более эффективно решать задачу упреждения его действий и задержания. [3] Вместе с тем, рассматриваемые СО не распознают способ передвижения обнаруженного нарушителя.
Известен способ обнаружения нарушителя СО, заключающийся в развертывании ПРМ и ПРД одного СО на местности напротив друг друга (на расстоянии от 5 м до максимальной длины ЗО); последующем контроле СО рубежа; формировании ПРМ СО сигнала тревоги при пересечении нарушителем его ЗО; передаче ПРМ СО на систему сбора и обработки информации (ССОИ) сигнала тревоги; обеспечении приёма сигнала тревоги от ПРМ СО ССОИ; формировании ССОИ сигнала тревоги (фиг. 1). [1, 2]
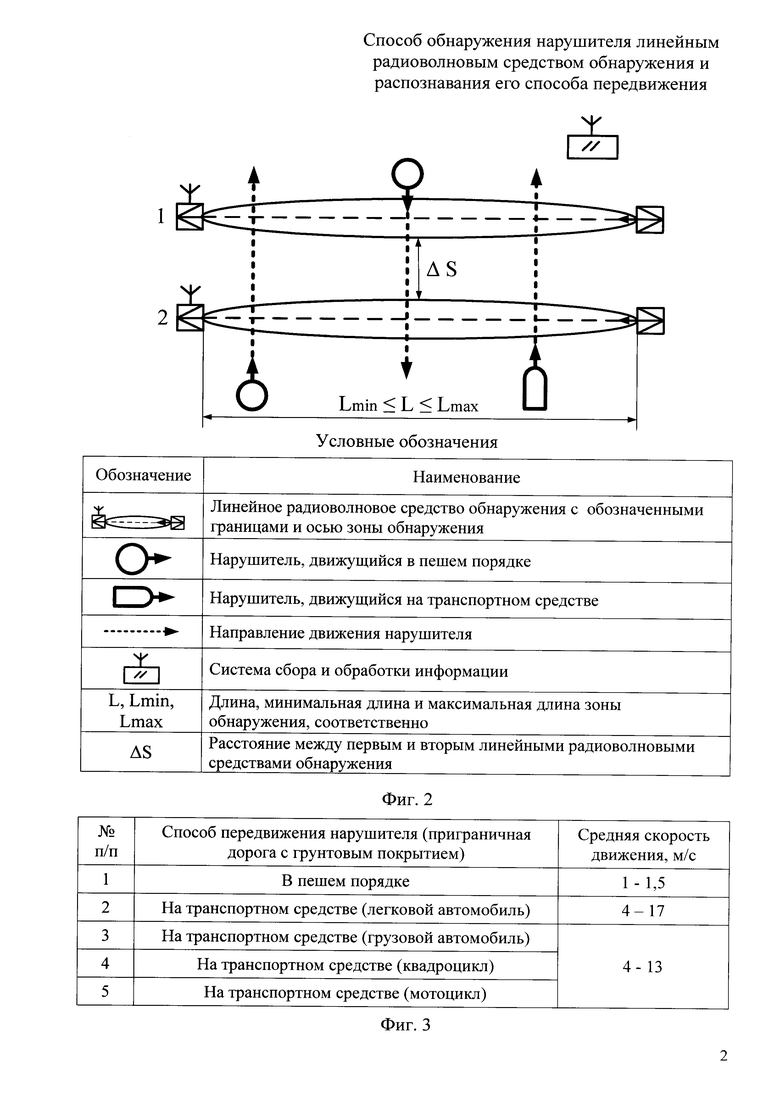
Известен способ обнаружения нарушителя СО и распознавания его способа передвижения (в пешем порядке или на транспортном средстве), заключающийся в развертывании на местности с участком дороги двух СО, на удалении друг от друга (на расстоянии нескольких сот метров); поочередным формированием сигналов тревоги средствами обнаружения с задержкой по времени при последовательном пересечении их ЗО нарушителем; приеме ССОИ двух сигналов тревоги и записи времени задержки между ними; расчете ССОИ скорости движения обнаруженного нарушителя по известному расстоянию между ними и времени задержки между поступившими сигналами тревоги; применении в ССОИ алгоритма распознавания способа передвижения (в пешем порядке или на транспортном средстве) обнаруженного нарушителя, основанного на сопоставлении рассчитанной скорости движения со значениями, характерными для нарушителя, движущегося по дороге в пешем порядке или на транспортном средстве (фиг. 2, 3). [1, 2]
Недостатком первого указанного способа является невозможность распознавания способа передвижения обнаруженного нарушителя (в пешем порядке или на транспортном средстве).
Второй указанный способ позволяет распознать способ передвижения обнаруженного на дороге нарушителя (в пешем порядке или на транспортном средстве) по скорости его движения, однако требует использования двух СО.
Целью изобретения является получение возможности распознавания способа передвижения обнаруженного на дороге нарушителя (в пешем порядке или на транспортном средстве) с применением одного СО.
Для достижения поставленной цели разработан способ обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения, заключающийся в развертывании СО на местности с участком дороги; обеспечении условия, при котором площадь первой зоны Френеля ЗО над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью транспортного средства, для чего при развертывании СО минимальное расстояние между ПРМ и ПРД СО устанавливается не менее 50% от максимально возможной длины ЗО, а ПРМ и ПРД СО располагаются на равном удалении от оси дороги; регистрации блоками малого и положительного порогов выделенного ПРМ СО полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении ЗО СО нарушителем, движущимся по дороге в пешем порядке; регистрации блоком большого порога выделенного ПРМ СО полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении ЗО СО нарушителем, движущимся по дороге на транспортном средстве; передаче ПРМ СО на ССОИ с сигналом тревоги информации о блоках (блоке) порога, зарегистрировавших полезный сигнал; применении в ССОИ алгоритма распознавания способа передвижения обнаруженного на дороге нарушителя: полезный сигнал, выделенный ПРМ СО, зарегистрирован блоками малого и положительного порогов - нарушитель движется по дороге в пешем порядке, полезный сигнал, выделенный ПРМ СО, зарегистрирован блоком большого порога - нарушитель движется по дороге на транспортном средстве (фиг. 4, 5).
На практике нарушитель, как правило, движется непосредственно по самой дороге, или обходит (объезжает) ее на таком удалении, на котором его невозможно услышать или увидеть с дороги (от одного до нескольких километров). То есть, если нарушитель и пересечет ЗО СО, развернутого поперек дороги, то только в той части, что пересекает дорогу (фиг. 6). [3]
Принцип действия линейного радиоволнового средства обнаружения основан на регистрации ПРМ СО полезного сигнала, вызванного перемещением нарушителя через его ЗО. Известно, что её размеры определяются размерами первой зоны Френеля, так как действие остальных смежных зон Френеля высших порядков взаимно компенсируется. Ширина (R1), а, следовательно, и площадь (S) первой зоны Френеля зависят от длины ЗО (L). [4] Площадь первой зоны Френеля ЗО максимальна в ее середине и минимальна вблизи ПРМ (ПРД) СО:

где S1 - площадь сечения первой зоны Френеля в середине ЗО средства, м2;
L - длина ЗО СО, м;
λ - длина волны передатчика СО, м.
При развертывании СО поперек дороги с определенным расстоянием между ПРМ и ПРД обеспечивается условие, когда в середине ЗО и на участке (Н) длиной до 20 метров, примыкающему к ней, площадь первой зоны Френеля ЗО (S1) над дорогой в несколько раз превышает площадь силуэта человека (Sч) и соизмерима с площадью транспортного средства (Sм) (фиг. 7):

где S1 - площадь сечения первой зоны Френеля в середине ЗО средства, м2;
Sч - площадь силуэта человека, м2;
Sм - площадь транспортного средства, м2.
Условие, указанное в формуле 2, обеспечивается размещением ПРМ и ПРД на равном удалении от оси дороги и минимальном расстоянии друг от друга - не менее 50% от максимально возможной длины ЗО. Причем, длина участка (Н), на котором условие, указанное в формуле 2, выполняется превышает среднюю ширину дороги (0,5-10 метров) в несколько раз (фиг. 7).
Полезный сигнал возникает вследствие пересечения и перекрытия нарушителем ЗО СО и представляет собой промодулированные по амплитуде колебания радиоволн, излучаемых ПРД и принимаемых ПРМ СО (фиг. 8, 9). [5]
Если участок ЗО СО (Н) пересекает нарушитель, двигающийся по дороге в пешем порядке, то выделенный ПРМ СО полезный сигнал в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции регистрируется блоками малого и положительного порогов (фиг. 8). При пересечении участка ЗО СО (Н) нарушителем, движущимся по дороге на транспортном средстве, полезный сигнал в виде одиночного отрицательного выброса большой глубины модуляции регистрируется блоком большого порога (фиг. 9). Сформированный ПРМ СО сигнал тревоги и информация о блоках (блоке) порога, зарегистрировавших полезный сигнал, передается на ССОИ, в которой по заданному алгоритму распознается способ передвижения обнаруженного на дороге нарушителя:
- если на ССОИ поступает сигнал тревоги, с информацией о регистрации полезного сигнала блоками малого и положительного порогов, то ЗО пересекает нарушитель, движущийся по дороге в пешем порядке (фиг. 4, 5);
- если на ССОИ поступает сигнал тревоги, с информацией о регистрации полезного сигнала блоком большого порога, то ЗО пересекает нарушитель, движущийся по дороге на транспортном средстве (фиг. 4, 5).
Способ включает два этапа: подготовительный и основной. Подготовительный этап:
1. Развертывание на местности с участком дороги по установленной схеме средства обнаружения, включающего в себя: передатчик 3 средства обнаружения и приемник средства обнаружения, состоящий из усилителя 4, полосового 5 фильтра, детектора 6, блока 7 большого порога, выходного 8 интерфейса, блока 9 малого порога, блока 10 положительного порога (фиг. 4, 10).
2. Развертывание на местности системы 11 сбора и обработки информации (фиг. 10).
3. Запись в систему 11 сбора и обработки информации алгоритма распознавания способа передвижения обнаруженного на дороге нарушителя (фиг. 10).
Основной этап начинается при движении нарушителя по дороге и попадании его в ЗО СО, он включает в себя:
1. Выделение детектором 6 из сигнала, поступившего на вход приемника средства обнаружения, усиленного усилителем 4 и отфильтрованного полосовым 5 фильтром полезного сигнала (фиг. 10).
2. Передачу выделенного детектором 6 полезного сигнала, на блоки 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 10).
3. Анализ глубины модуляции полезного сигнала, поступившего на блоки 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 10).
4. Регистрацию полезного сигнала блоком 7 большого порога при полезном сигнале - одиночном отрицательном выбросе большой глубины модуляции или регистрацию полезного сигнала блоками 9 малого и 10 положительного порогов при полезном сигнале - последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции, в зависимости от способа передвижения пересекающего ЗО нарушителя (фиг. 7, 8, 10).
5. Передачу сигнала тревоги с информацией о блоках (блоке) порога, зарегистрировавших полезный сигнал, выходным 8 интерфейсом на систему 11 сбора и обработки информации (фиг. 10).
6. Прием системой 11 сбора и обработки информации сигнала тревоги (фиг. 10).
7. Выход нарушителя из ЗО средства, формирование приемником средства обнаружения дежурного сигнала и передача его на систему 11 сбора и обработки информации (фиг. 10).
8. Определение системой 11 сбора и обработки информации способа передвижения обнаруженного нарушителя по дороге по заданному алгоритму:
- полезный сигнал, выделенный ПРМ СО зарегистрирован блоками малого и положительного порогов - нарушитель движется по дороге в пешем порядке (фиг. 4, 5);
- полезный сигнал, выделенный ПРМ СО зарегистрирован блоком большого порога - нарушитель движется по дороге на транспортном средстве (фиг. 4, 5).
9. Обнуление памяти системы 11 сбора и обработки информации (фиг. 10).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания линейного радиоволнового средства обнаружения в известном способе обнаружения нарушителя;
- фиг. 2 - схема развертывания линейных радиоволновых средств обнаружения в известном способе обнаружения нарушителя СО и распознавания его способа передвижения;
- фиг. 3 - таблица скоростей нарушителей при различных способах передвижения;
- фиг. 4 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе обнаружения нарушителя СО и распознавания его способа передвижения;
- фиг. 5 - алгоритм обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения;
- фиг. 6 - схема движения нарушителя по дороге и в обход нее;
- фиг. 7 - таблица значений соотношений площади сечения первой зоны Френеля зоны обнаружения типового линейного радиоволнового средства обнаружения и площади силуэта нарушителя в зависимости от способа его передвижения;
- фиг. 8 - эпюр выделенного приемником средства обнаружения полезного сигнала при пересечении середины зоны обнаружения средства нарушителем, движущимся в пешем порядке;
- фиг. 9 - эпюр выделенного приемником средства обнаружения полезного сигнала при пересечении середины зоны обнаружения средства нарушителем, движущимся на транспортном средстве;
- фиг. 10 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается получением возможности распознавания способа передвижения обнаруженного на дороге нарушителя (в пешем порядке или на транспортном средстве) с применением одного СО.
Источники информации
1. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
2. Маршалов, Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
3. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
4. Долуханов, М.П. Распространение радиоволн: Учебник - М.: Связьиздат, 1960. - 391 с.
5. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая-Телеком, 2004. - 367 с.





Изобретение относится к способам охранного мониторинга местности. Технический результат заключается в получении возможности распознавания способа передвижения обнаруженного на дороге нарушителя - в пешем порядке или на транспортном средстве, с применением одного средства обнаружения. Способ заключается в развертывании средства охраны (СО) на местности с участком дороги; обеспечении условия, при котором площадь первой зоны Френеля зоны обнаружения над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью транспортного средства, для чего при развертывании СО минимальное расстояние между приемником (ПРМ) и передатчиком (ПРД) СО устанавливается не менее 50% от максимально возможной длины зоны, а ПРМ и ПРД располагаются на равном удалении от оси дороги; регистрации соответствующими блоками порогов выделенного ПРМ полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении зоны нарушителем, регистрации одиночного отрицательного выброса большой глубины модуляции при пересечении зоны нарушителем, применении алгоритма распознавания способа передвижения обнаруженного на дороге нарушителя к полученным сигналам. 10 ил.
Способ обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения, заключающийся в развертывании приемника и передатчика радиоволнового средства обнаружения на местности напротив друг друга; последующем контроле средством обнаружения рубежа; формировании приемником средства обнаружения сигнала тревоги при пересечении нарушителем его зоны обнаружения; передаче приемником средства обнаружения на систему сбора и обработки информации сигнала тревоги; обеспечении приема сигнала тревоги от приемника средства обнаружения системой сбора и обработки информации, отличающийся тем, что средство обнаружения разворачивается на местности с участком дороги; обеспечивается условие, при котором площадь первой зоны Френеля зоны обнаружения над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью транспортного средства, для чего при развертывании средства обнаружения минимальное расстояние между приемником и передатчиком средства обнаружения устанавливается не менее 50% от максимально возможной длины зоны обнаружения, а приемник и передатчик средства обнаружения располагаются на равном удалении от оси дороги; приемник средства обнаружения регистрирует полезный сигнал в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении зоны обнаружения нарушителем, движущимся по дороге в пешем порядке; приемник средства обнаружения регистрирует полезный сигнал только в виде одиночного отрицательного выброса большой глубины модуляции при пересечении зоны обнаружения нарушителем, движущимся по дороге на транспортном средстве; приемник средства обнаружения передает на систему сбора и обработки информации с сигналом тревоги информацию о виде зарегистрированного полезного сигнала; в системе сбора и обработки информации применяется алгоритм распознавания способа передвижения обнаруженного на дороге нарушителя: приемником средства обнаружения зарегистрирован полезный сигнал в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины - нарушитель движется по дороге в пешем порядке, приемником средства обнаружения зарегистрирован полезный сигнал только в виде одиночного отрицательного выброса большой глубины модуляции - нарушитель движется по дороге на транспортном средстве.
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2016 |
|
RU2626742C1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1997 |
|
RU2109343C1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| US 5510766 A1, 23.04.1996. | |||

