Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля дороги (тропы) одним линейным радиоволновым средством обнаружения (СО) когда требуется классификация обнаруженного на дороге нарушителя (транспортное средство или пеший нарушитель).
Линейные радиоволновые средства обнаружения характеризуются протяженной зоной обнаружения (ЗО) - от 10 до 100 метров и, в большинстве случаев, используются для контроля маршрутов, на которых вероятно появление нарушителей [1, 2]. Важным для сил реагирования является не только знание факта нарушения и направления движения нарушителя, но и его класса (пеший нарушитель или транспортное средство), позволяющее оценить возможный диапазон скоростей нарушителя, характер его действий и на основе полученных данных выбрать наиболее рациональное решение по поиску и последующему задержанию. [3]
Прототипом предлагаемого способа является способ обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения, заключающийся в развертывании СО на местности с участком дороги; обеспечении условия, при котором площадь первой зоны Френеля 30 над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью силуэта транспортного средства, для чего при развертывании СО минимальное расстояние между приемником (ПРМ) и передатчиком (ПРД) СО устанавливается не менее 50% от максимально возможной длины ЗО, а ПРМ и ПРД СО располагаются на равном удалении от оси дороги; регистрации блоками малого и положительного порогов выделенного ПРМ СО полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении ЗО СО нарушителем, движущимся по дороге в пешем порядке; регистрации блоком большого порога выделенного ПРМ СО полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении ЗО СО нарушителем, движущимся по дороге на транспортном средстве; передаче ПРМ СО на систему сбора и обработки информации (ССОИ) с сигналом тревоги информации о блоках или блоке порога, зарегистрировавших полезный сигнал; применении в ССОИ алгоритма распознавания способа передвижения обнаруженного на дороге нарушителя: полезный сигнал, выделенный ПРМ СО, зарегистрирован блоками малого и положительного порогов - нарушитель движется по дороге в пешем порядке, полезный сигнал, выделенный ПРМ СО, зарегистрирован блоком большого порога - нарушитель движется по дороге на транспортном средстве. [4]
Недостатком предлагаемого способа является необходимость проведения значительного объема инженерных работ по подготовке местности к развертыванию СО (вырубка деревьев и кустарника, выкашивание высокой травы и т.д.). Объем выполняемых работ, при этом, напрямую зависит от расстояния между ПРМ и ПРД СО (общей длины ЗО). Так, например, соотношение объема выполняемых работ при общей длине ЗО 10, 50 и 100 м составляет 1:5:10. Кроме того, большое расчищенное пространство под место развертывания СО, является демаскирующим признаком. [5]
Целью изобретения являются: снижение материальных и временных затрат на развертывание СО, повышение скрытности применения СО на местности с сохранением низкой вероятности ошибки распознавания класса обнаруженного объекта.
Для достижения поставленной цели разработан способ определения границ и размеров участка зоны обнаружения линейного радиоволнового средства обнаружения, используемого для обнаружения и классификации объектов, заключающийся в развертывании СО на местности с участком дороги; обеспечении условия, при котором площадь проекции первой зоны Френеля ЗО СО над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью силуэта транспортного средства, для чего, ПРМ и ПРД СО располагают на противоположных сторонах дороги, каждый на расстоянии не менее 5 метров от оси дороги; обеспечении требуемого условия отношений площади проекции первой зоны Френеля ЗО СО над дорогой к площадям силуэтов нарушителей за счет уменьшения угла пересечения осью 30 средства обнаружения оси дороги; расчете значения угла пересечения осью ЗО средства обнаружения оси дороги с учетом общей длины ЗО средства обнаружения и расстояния от точки пересечения оси дороги с осью 30 до ближайшего к ней блока - ПРМ или ПРД СО, но не более 45 и не менее 15 градусов; регистрации блоками малого и положительного порогов выделенного ПРМ СО полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении ЗО СО пешим нарушителем; регистрации блоком большого порога выделенного ПРМ СО полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении ЗО СО транспортным средством; передаче ПРМ СО на ССОИ с сигналом тревоги информации о блоках или блоке порога, зарегистрировавших полезный сигнал; применении в ССОИ алгоритма классификации обнаруженного на дороге нарушителя: полезный сигнал, выделенный ПРМ СО, зарегистрирован блоками малого и положительного порогов - по дороге движется пеший нарушитель, полезный сигнал, выделенный ПРМ СО, зарегистрирован блоком большого порога - по дороге движется транспортное средство (фиг. 1).
В соответствии с рекомендациями производителей СО, ось ЗО СО разворачивается на местности перпендикулярно предполагаемому направлению движения нарушителя для обеспечения максимальной вероятности его обнаружения, когда он движется с ухищрениями (согнувшись, ползком и т.п.) [6, 7]. Такая тактика действий характерна для нарушителей пытающихся скрытно попасть на охраняемый объект. Вместе с тем, при охранном мониторинге маршрутов, нарушитель (транспортное средство или пеший нарушитель) движется по дороге. Его задача заключается в выходе на условленный рубеж в максимально короткие сроки без применения выше указанных ухищрений. Поэтому рекомендации производителя, в данном случае, не являются основополагающими [3]. Место установки ПРМ и ПРД СО выбирается исходя из задачи обеспечения минимальных материальных и временных затрат на развертывание СО и его лучшей маскируемости, а не максимально возможной протяженности контролируемого участка. Рабочая частота применяемых СО составляет от 10 до 15 ГГц, поэтому длина волны (А) варьируется от 2 до 3 см [7].
Низкая вероятность ошибки распознавания класса обнаруженного объекта обеспечивается при выполнении требуемого условия отношения площади проекции первой зоны Френеля ЗО СО над дорогой к площадям силуэтов нарушителей: площадь проекции первой зоны Френеля ЗО СО над дорогой должна в несколько (два и более) раз превышать площадь силуэта человека и быть меньше или соизмеримой площади силуэта транспортного средства: [4]

где S - площадь проекции первой зоны Френеля ЗО СО над дорогой, м2;
SЧ - площадь силуэта человека, не превышающая 0,6 м2;
STC - площадь силуэта транспортного средства, превышающая 3,5 м2.
Когда расстояние между ПРМ и ПРД СО составляет менее 50% от максимально возможной длины ЗО (как правило - это менее 50 м, при максимально возможной длине 100 м) и (или) ось дороги делит элипсоидообразную ЗО на неравные половины, применить известный способ либо невозможно, либо вероятность ошибки распознавания существенно высока. Площадь проекции первой зоны Френеля ЗО СО над дорогой меньше площади силуэта транспортного средства. По отношению к площади силуэта человека, площадь проекции первой зоны Френеля ЗО СО над дорогой, в зависимости от выбранного расстояния от точки пересечения оси дороги с осью ЗО до ближайшего к ней блока - ПРМ или ПРД СО, либо меньше ее, либо соизмерима ей, либо больше, но менее чем в два раза (фиг. 2): [4]
где L - общая длина ЗО средства обнаружения, м;
LMAX - максимально возможная длина ЗО средства обнаружения, м;
LПРМ - расстояние от ПРМ СО до оси дороги, м;
LПРД - расстояние от ПРД СО до оси дороги, м.
В предлагаемом способе, уменьшение площади проекции первой зоны Френеля ЗО СО над дорогой ниже требуемого значения из-за сокращения общей длины 30 средства обнаружения (менее 50 м) и (или) деления осью дороги элипсоидообразной ЗО на неравные половины не допускается за счет уменьшения угла пересечения осью ЗО средства обнаружения оси дороги. Известно, что ее значение обратно пропорциональна квадрату синуса угла пересечения осью 30 средства обнаружения оси дороги:
где λ - длина волны, м;
α - угол пересечения осью ЗО средства обнаружения оси дороги, град.
Независимо от пропорций деления осью дороги элипсоидообразной ЗО, площадь проекции первой зоны Френеля ЗО СО над дорогой в предлагаемом способе меньше или соизмерима площади силуэта транспортного средства и превышает площадь силуэта человека в несколько (два и более) раз (фиг. 3).
Угол пересечения осью 30 средства обнаружения оси дороги в предлагаемом способе выбирается не более 45 и не менее 15 градусов. Это обусловлено тем, что при угле более 45 градусов, площадь проекции первой зоны Френеля ЗО СО над дорогой вблизи ПРМ или ПРД не превышает площадь силуэта человека в несколько (два и более) раз. При уменьшении угла менее 15 градусов, площадь проекции первой зоны Френеля ЗО СО над дорогой превышает площадь силуэта транспортного средства: (фиг. 4)

С учетом требуемых условий, указанных в формуле 1 и 4, из формулы 3 значение угла пересечения осью 30 средства обнаружения оси дороги с учетом общей длины ЗО средства обнаружения и расстояния от точки пересечения оси дороги с осью ЗО до ближайшего к ней блока - ПРМ или ПРД СО рассчитывается (фиг. 3):

Способ включает два этапа: подготовительный и основной. Подготовительный этап:
1. Выбор места установки приемника и передатчика СО, обеспечивающего наименьшие материальные и временные затраты на развертывание СО и скрытность применения СО на местности (фиг. 1).
2. Выбор угла пересечения осью ЗО средства обнаружения оси дороги (а) с учетом общей длины ЗО средства обнаружения (L) и расстояния от точки пересечения оси дороги с осью ЗО до ближайшего к ней блока - ПРМ (LПРМ) или ПРД (LПРД) СО в соответствии с формулой 5 (фиг. 1).
3. Проверка выполнения требуемого условия отношений площади проекции первой зоны Френеля ЗО СО над дорогой к площадям силуэтов нарушителей. Если условие выполняется - переход к пункту 4. В обратной ситуации - изменение выбора угла пересечения осью ЗО средства обнаружения оси дороги (а) в пункте 2.
4. Развертывание на местности с участком дороги по установленной схеме (с учетом пунктов 1-3) средства обнаружения, включающего в себя: передатчик 1 средства обнаружения и приемник 2 средства обнаружения, состоящий из усилителя 4, полосового 5 фильтра, детектора 6, блока 7 большого порога, выходного 8 интерфейса, блока 9 малого порога, блока 10 положительного порога (фиг. 5).
5. Развертывание на местности системы 3 сбора и обработки информации (фиг. 5).
6. Запись в систему 3 сбора и обработки информации алгоритма распознавания класса обнаруженного на дороге нарушителя (фиг. 5).
Основной этап начинается при движении нарушителя по дороге и попадании его в ЗО СО, он включает в себя:
1. Выделение детектором 6 из сигнала, поступившего на вход приемника средства обнаружения, усиленного усилителем 4 и отфильтрованного полосовым 5 фильтром полезного сигнала (фиг. 5).
2. Передачу выделенного детектором 6 полезного сигнала, на блок 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 5).
3. Анализ глубины модуляции полезного сигнала, поступившего на блоки 7 большого порога, 9 малого порога, 10 положительного порога (фиг. 5).
4. Регистрацию полезного сигнала блоком 7 большого порога при полезном сигнале - одиночном отрицательном выбросе большой глубины модуляции или регистрацию полезного сигнала блоками 9 малого и 10 положительного порогов при полезном сигнале - последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции, в зависимости от класса пересекающего ЗО нарушителя (фиг. 5).
5. Передачу сигнала тревоги с информацией о блоках (блоке) порога, зарегистрировавших полезный сигнал, выходным 8 интерфейсом на систему 3 сбора и обработки информации (фиг. 5).
6. Прием системой 3 сбора и обработки информации сигнала тревоги (фиг. 5).
7. Выход нарушителя из ЗО средства, формирование приемником средства обнаружения дежурного сигнала и передача его на систему 3 сбора и обработки информации (фиг. 5).
8. Определение системой 3 сбора и обработки информации класса обнаруженного нарушителя по дороге по заданному алгоритму:
- полезный сигнал, выделенный ПРМ СО зарегистрирован блоками малого и положительного порогов - по дороге движется пеший нарушитель (фиг. 5);
- полезный сигнал, выделенный ПРМ СО зарегистрирован блоком большого порога - по дороге движется транспортное средство (фиг. 5).
9. Обнуление памяти системы 3 сбора и обработки информации (фиг. 5).
Сущность изобретения поясняется графическими материалами, где представлено на:
фиг. 1 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе;
фиг. 2 - таблица выполняемости условия распознавания класса обнаруженного объекта в известном способе, при расстоянии между ПРМ и ПРД СО менее 50% от максимально возможной длины ЗО;
фиг. 3 - таблица выполняемости условия распознавания класса обнаруженного объекта в предлагаемом способе, при расстоянии между ПРМ и ПРД СО менее 50% от максимально возможной длины ЗО;
фиг. 4 - таблица выполняемости условия распознавания класса обнаруженного объекта в предлагаемом способе, при расстоянии между ПРМ и ПРД СО менее 50% от максимально возможной длины ЗО и выборе угла пересечения осью ЗО средства обнаружения оси дороги менее 15 или более 45 градусов;
фиг. 5 - структурная схема взаимосвязи применяемых устройств при реализации предлагаемого способа.
Технический результат заключается в снижение материальных и временных затрат на развертывание СО, повышение скрытности применения СО на местности с сохранением низкой вероятности ошибки распознавания класса обнаруженного объекта.
Источники информации
1. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
2. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
3. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
4. Пат. 2682475 Российская Федерация, МПК51 G08B 13/18; G08B 25/00. Способ обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения / С.А. Удот., А.В. Рубаник - №2017142852; заявл. 07.12.17; опубл. 19.03.19, Бюл. №8.
5. Типовые нормы вырубки, нормы времени на рубку ухода за лесом в равнинных условиях. - М.: 199. - 83 с.
6. Никитин Н.В., Малемин С.Г. Применение радиоволновых и комбинированных извещателей с целью повышения обнаруживающей способности и помехозащищенности. Методическое пособие (Р 78.36.022-2013). - М.: НИЦ «Охрана», 2012. - 120 с.
7. Общие сведения о комплексе «Радиобарьер». Руководство по эксплуатации. Редакция: РЭ 03 общие 2016 04 - М. ООО «Полюс - СТ», 2016.

Использование: изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля дороги одним линейным радиоволновым средством обнаружения (СО), когда требуется классификация обнаруженного на дороге нарушителя (транспортное средство или пеший нарушитель). Сущность: способ заключается в развертывании СО на местности с участком дороги; обеспечении условия, при котором площадь проекции первой зоны Френеля зоны обнаружения (ЗО) СО над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью силуэта транспортного средства, для чего приемник (ПРМ) и передатчик (ПРД) СО располагают на противоположных сторонах дороги, каждый на расстоянии не менее 5 метров от оси дороги; обеспечении требуемого условия отношений площади проекции первой зоны Френеля ЗО СО над дорогой к площадям силуэтов нарушителей за счет уменьшения угла пересечения осью ЗО средства обнаружения оси дороги; расчете значения угла пересечения осью ЗО средства обнаружения оси дороги с учетом общей длины ЗО средства обнаружения и расстояния от точки пересечения оси дороги с осью ЗО до ближайшего к ней блока - ПРМ или ПРД СО, но не более 45 и не менее 15 градусов; регистрации блоками малого и положительного порогов выделенного ПРМ СО полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении ЗО СО пешим нарушителем; регистрации блоком большого порога выделенного ПРМ СО полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении ЗО СО транспортным средством; передаче ПРМ СО на систему сбора и обработки информации (ССОИ) с сигналом тревоги информации о блоках или блоке порога, зарегистрировавших полезный сигнал; применении в ССОИ алгоритма классификации обнаруженного на дороге нарушителя: полезный сигнал, выделенный ПРМ СО, зарегистрирован блоками малого и положительного порогов - по дороге движется пеший нарушитель, полезный сигнал, выделенный ПРМ СО, зарегистрирован блоком большого порога - по дороге движется транспортное средство. Способ включает подготовительный этап с развертыванием на дороге по установленной схеме СО и основной этап, который начинается с обнаружения нарушителя и заканчивается распознаванием его класса. Технический результат: снижение временных затрат на развертывание СО, повышение скрытности применения СО на местности с сохранением низкой вероятности ошибки распознавания класса обнаруженного объекта. 5 ил.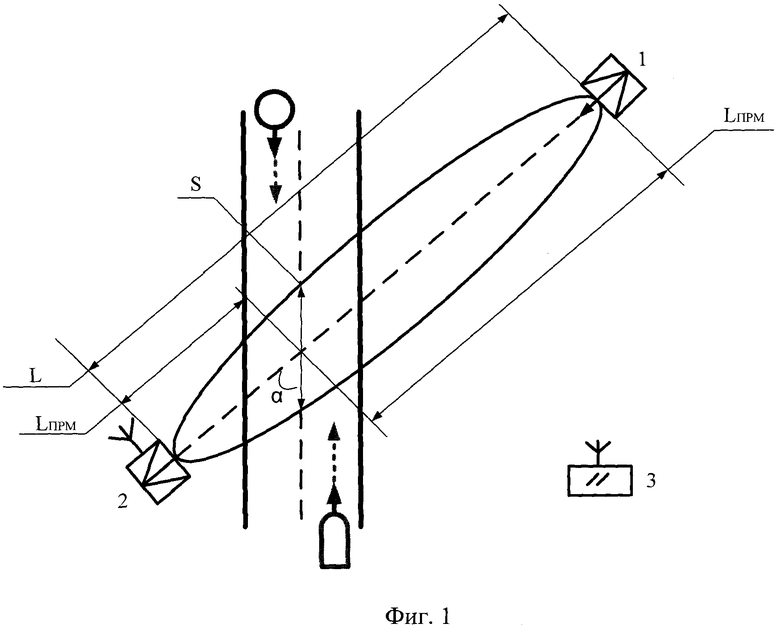
Способ определения границ и размеров участка зоны обнаружения линейного радиоволнового средства обнаружения, используемого для обнаружения и классификации объектов, заключающийся в развертывании линейного радиоволнового средства обнаружения на местности с участком дороги; обеспечении условия, при котором площадь первой зоны Френеля зоны обнаружения средства обнаружения над дорогой в несколько раз превышает площадь силуэта человека и соизмерима с площадью транспортного средства; регистрации блоками малого и положительного порогов выделенного приемником средства обнаружения полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов при пересечении зоны обнаружения пешим нарушителем; регистрации выделенного приемником средства обнаружения полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении зоны обнаружения транспортным средством; передаче приемником средства обнаружения на систему сбора и обработки информации сигнала тревоги с информации о блоках или блоке порога, зарегистрировавших полезный сигнал; применении в системе сбора и обработки информации алгоритма классификации обнаруженного на дороге нарушителя: полезный сигнал, выделенный приемником средства обнаружения, зарегистрирован блоками малого и положительного порогов - по дороге движется пеший нарушитель, полезный сигнал, выделенный приемником средства обнаружения, зарегистрирован блоком большого порога - по дороге движется транспортное средство, отличающийся тем, что приемник и передатчик средства обнаружения располагают на противоположных сторонах дороги, каждый на расстоянии не менее 5 метров от оси дороги; требуемое условие отношений площади проекции первой зоны Френеля зоны обнаружения средства обнаружения над дорогой к площадям силуэтов нарушителей обеспечивается за счет уменьшения угла пересечения осью зоны обнаружения средства обнаружения оси дороги; значение угла пересечения осью зоны обнаружения средства обнаружения оси дороги рассчитывается с учетом общей длины зоны обнаружения средства обнаружения и расстояния от точки пересечения оси дороги с осью зоны обнаружения до ближайшего к ней блока - приемника или передатчика средства обнаружения, но не более 45 и не менее 15 градусов.
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И РАСПОЗНАВАНИЯ ЕГО ТИПА С ПРИМЕНЕНИЕМ ПАССИВНОГО ИНФРАКРАСНОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2020 |
|
RU2738213C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ЛИНЕЙНЫХ РАДИОВОЛНОВЫХ СРЕДСТВ ОБНАРУЖЕНИЯ | 2018 |
|
RU2707908C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ДВУХ ЛИНЕЙНЫХ РАДИОВОЛНОВЫХ СРЕДСТВ ОБНАРУЖЕНИЯ | 2018 |
|
RU2696087C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА РАЗВИЛКИ ДОРОГ С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2648210C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ПЕРЕСЕЧЕНИЯ ДОРОГ ЛИНЕЙНЫМ РАДИОВОЛНОВЫМ СРЕДСТВОМ ОБНАРУЖЕНИЯ | 2018 |
|
RU2701474C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ ЛИНЕЙНЫМ РАДИОВОЛНОВЫМ СРЕДСТВОМ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЕГО СПОСОБА ПЕРЕДВИЖЕНИЯ | 2017 |
|
RU2682475C1 |
| WO 2008044934 A1, 17.04.2008. | |||

