Изобретение относится к области приборостроения, а именно к области автоматического регулирования, и может быть использовано в системах высокоточного управления движением центра масс летательных аппаратов.
Из предшествующего уровня техники известен способ имитации траекторий движения воздушных объектов, защищенный патентом РФ №2419072, включающий предполетную подготовку и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками. Сопряжение двух соседних прямолинейных разнонаправленных участков движения осуществляется переходными кривыми, каждая из которых состоит из двух ветвей кубической параболы, сопряженных между собой дугой окружности или совмещенных непосредственно. Недостатками этого способа являются низкая точность глобального и локального планирования траектории движения летательного аппарата из-за игнорирования динамических свойств летательного аппарата, а также высокая вычислительная трудоемкость локального планирования траектории движения средствами бортовой системы управления из-за необходимости выполнения расчетов для каждой опорной точки траектории.
Известен способ управления движением аэробаллистического летательного аппарата по заданной пространственной траектории, защищенный патентом РФ №2571567, включающий предполетную подготовку с использованием математической модели летательного аппарата и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками. Недостатками данного способа являются низкая точность и неадекватность результатов глобального и локального планирования траектории движения из-за использования приближенных численных методов математического моделирования динамических свойств летательного аппарата и исключения части опорных точек из рассмотрения по причине их несоответствия требованиям, предъявляемым к узловым точкам, а также высокая вычислительная трудоемкость локального планирования траектории движения средствами бортовой системы управления из-за необходимости выполнения расчетов для каждой узловой точки траектории.
Наиболее близким к заявленному способу является способ управления движением летательного аппарата, защищенный патентом РФ №2648556, включающий предполетную подготовку размещением в памяти бортовой системы управления летательного аппарата исходных данных о динамических параметрах летательного аппарата и опорных точках траектории в форме матриц BASIS, ROUTE и COORD, формирование программной траектории движения летательного аппарата по матричной формуле 
 управление движением летательного аппарата в полете при помощи метода пропорционального сближения, с учетом динамической коррекции программной траектории движения летательного аппарата по той же матричной формуле (при необходимости). Недостатком данного способа является неадекватность результатов планирования из-за игнорирования изменений динамических свойств летательного аппарата в полете вследствие уменьшения запасов топлива и массы полезной нагрузки.
управление движением летательного аппарата в полете при помощи метода пропорционального сближения, с учетом динамической коррекции программной траектории движения летательного аппарата по той же матричной формуле (при необходимости). Недостатком данного способа является неадекватность результатов планирования из-за игнорирования изменений динамических свойств летательного аппарата в полете вследствие уменьшения запасов топлива и массы полезной нагрузки.
Задача изобретения - повышение адекватности глобального и локального планирования траектории движения летательного аппарата средствами бортовой системы управления за счет коррекции исходных данных о динамических параметрах летательного аппарата, изменяемых вследствие уменьшения запасов топлива и массы полезной нагрузки для случая, когда все опорные точки траектории расположены на первом кусочно-постоянном - начальном отрезке траектории, то есть на отрезке, где запас топлива и масса полезной нагрузки принимается неизменными с начала полета летательного аппарата.
Задача решается тем, что в предложенном способе управления движением летательного аппарата, включающем предполетную подготовку с использованием математической модели летательного аппарата, осуществляется запись в память бортовой системы управления исходных данных о динамических параметрах летательного аппарата и опорных точках траектории полета в форме матриц BASIS, ROUTE и COORD, где
 - блочная матрица-строка базисных функций, элементы которой вычисляют по формуле:
- блочная матрица-строка базисных функций, элементы которой вычисляют по формуле:

 - маршрутная матрица, элементы которой вычисляют подстановкой относительного времени начала движения летательного аппарата по маршруту Т0=0 в матрицу BASIS по формуле:
- маршрутная матрица, элементы которой вычисляют подстановкой относительного времени начала движения летательного аппарата по маршруту Т0=0 в матрицу BASIS по формуле:

 - матрица-столбец параметров опорных точек траектории, элементы которой соответствуют параметрам опорных точек траектории
- матрица-столбец параметров опорных точек траектории, элементы которой соответствуют параметрам опорных точек траектории 
 - опорные точки траектории, расположенные на первом - начальном отрезке траектории полета летательного аппарата [Т0,Т1];
- опорные точки траектории, расположенные на первом - начальном отрезке траектории полета летательного аппарата [Т0,Т1];
 - параметры опорных точек траектории;
- параметры опорных точек траектории;
 - время прохождения летательным аппаратом опорных точек траектории;
- время прохождения летательным аппаратом опорных точек траектории;
 - различные корни первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [T0, T1] и их кратности;
- различные корни первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [T0, T1] и их кратности;
n - порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории;
p - количество различных корней первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [Т0, Т1].
Формирование программной траектории движения летательного аппарата осуществляется по опорным точкам, с дальнейшим восстановлением в процессе полета траектории движения летательного аппарата плавным переходом между опорными точками. До начала движения летательного аппарата дополнительно выполняется формирование в памяти бортовой системы управления летательного аппарата программной траектории движения по матричной формуле:

с подстановкой в результат 
Управление движением летательного аппарата в полете осуществляется с помощью метода пропорционального сближения при необходимости с учетом динамической коррекции программной траектории движения летательного аппарата по матричной формуле (3), где
 - функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - аналитическая матричная экспонента от матрицы в форме Фробениуса
- аналитическая матричная экспонента от матрицы в форме Фробениуса 
 соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
 - значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем
- матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем 
 - матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
- матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
 - численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории
- численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории 
T1, …, Tq - точки разрыва траектории, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата;
q - количество точек разрыва траектории, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата.
Таким образом, заявляемый способ управления движением летательного аппарата обеспечивает выполнение поставленной технической задачи.
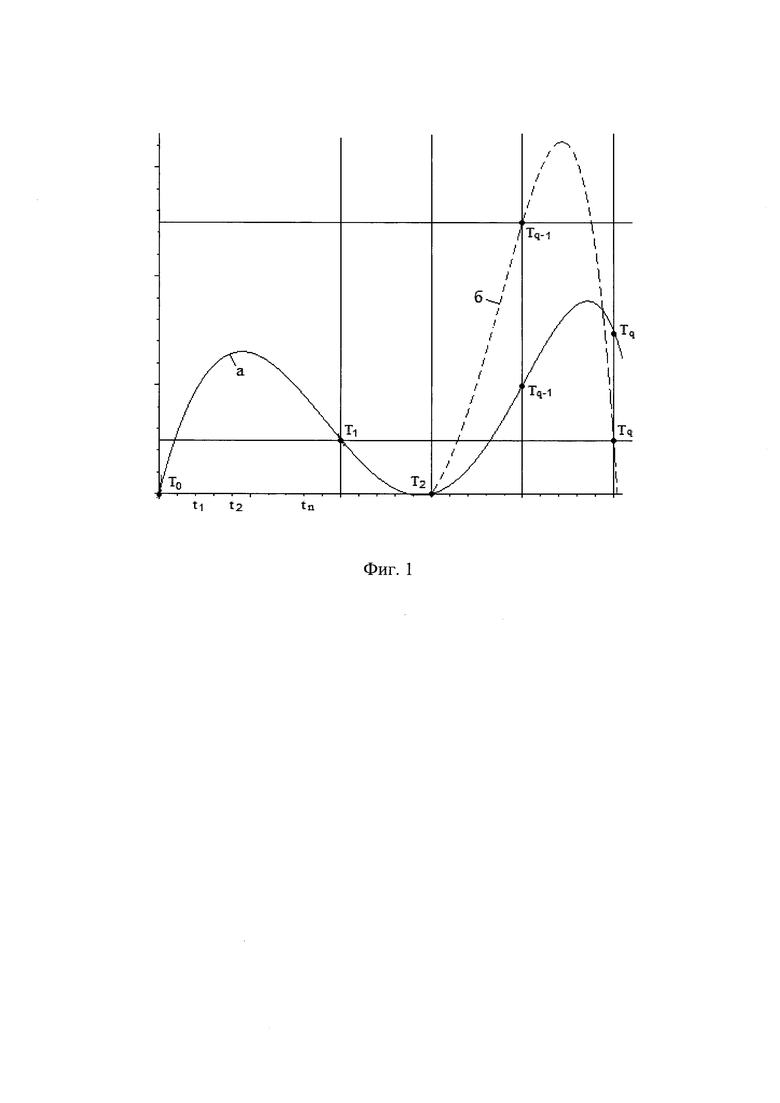
Заявляемое изобретение поясняется фиг. 1, на которой показаны опорные точки траектории t1, …, tn, точки разрыва траектории T1, …, Tq и программная траектория движения летательного аппарата с учетом динамической коррекции в полете, где а - траектория, построенная в результате глобального планирования; 6 - траектория, построенная в результате локального планирования.
Предлагаемый способ управления движением летательного аппарата осуществляется следующим образом.
В ходе предполетной подготовки, до начала движения по траектории, с использованием вычислительных средств бортовой системы управления или наземных средств баллистико-навигационного обеспечения полетов летательного аппарата:
1. По имеющейся приближенной математической модели летательного аппарата, представленной в виде приведенного однородного обыкновенного дифференциального уравнения n-го порядка с кусочно-постоянными коэффициентами вида:

где n - порядок математической модели летательного аппарата, совпадающей с количеством опорных точек траектории, строится q+1 характеристических полиномов вида:

где  - кусочно-постоянные коэффициенты,
- кусочно-постоянные коэффициенты, 
s - независимая переменная (параметр интегрального преобразования Лапласа),
q - количество точек разрыва траектории, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата (кусочно-постоянных коэффициентов).
Полином  соответствует первому - начальному кусочно-постоянному отрезку траектории, расположенному между точками Т0 и Т1, где Т0 - относительное время начала полета, Т0=0; T1 - относительное время первого изменения исходных данных о динамических параметрах летательного аппарата, вызванных изменением запаса топлива и массы полезной нагрузки.
соответствует первому - начальному кусочно-постоянному отрезку траектории, расположенному между точками Т0 и Т1, где Т0 - относительное время начала полета, Т0=0; T1 - относительное время первого изменения исходных данных о динамических параметрах летательного аппарата, вызванных изменением запаса топлива и массы полезной нагрузки.
Полином  соответствует последнему кусочно-постоянному полуинтервалу траектории, расположенному правее точки Tq, где Tq - относительное время последнего изменения исходных данных о динамических параметрах летательного аппарата, вызванных изменением запаса топлива и массы полезной нагрузки.
соответствует последнему кусочно-постоянному полуинтервалу траектории, расположенному правее точки Tq, где Tq - относительное время последнего изменения исходных данных о динамических параметрах летательного аппарата, вызванных изменением запаса топлива и массы полезной нагрузки.
На каждом из отрезков и последнем полуинтервале траектории кусочно-постоянные коэффициенты принимаются неизменными, то есть изменение запасов топлива и массы полезной нагрузки не оказывают принципиального влияния на динамические параметры летательного аппарата. Изменение кусочно-постоянных коэффициентов происходит только в точках разрыва траектории Т1,…, Tq, причем в этих точках изменяет свое значение хотя бы один из коэффициентов дифференциального уравнения, соответствующего математической модели летательного аппарата.
Если порядок математической модели летательного аппарата меньше количества опорных точек траектории, с использованием положений теории обыкновенных дифференциальных уравнений предварительно строится эквивалентная математическая модель летательного аппарата необходимой размерности.
2. Аналитическими методами вычисляются различные корни  первого характеристического полинома
первого характеристического полинома 
 соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [T0, T1] и их кратности m1, m2, …mр, где λ - i-й корень полинома; mi - кратность i-го корня полинома; р - количество различных корней полинома.
соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [T0, T1] и их кратности m1, m2, …mр, где λ - i-й корень полинома; mi - кратность i-го корня полинома; р - количество различных корней полинома.
3. Для частного случая простых корней характеристического полинома (n=р) формируется матрица:

где  - i-я базисная функция, соответствующая корню
- i-я базисная функция, соответствующая корню 
Для случая кратных корней полинома (n>р) матрица строится в порядке следования корней и возрастания номера корневой модификации базисной функции:

где 
То есть:

где 

4. Формируется маршрутная матрица  элементы которой вычисляются подстановкой относительного времени начала движения летательного аппарата по маршруту Т0 - 0 в матрицу BASIS по формуле (2).
элементы которой вычисляются подстановкой относительного времени начала движения летательного аппарата по маршруту Т0 - 0 в матрицу BASIS по формуле (2).
5. Формируется матрица-столбец значений координат в опорных точках траектории на плоскости в порядке их следования  где
где 
6. Матрицы BASIS, ROUTE и COORD записываются в память вычислительных средств бортовой системы управления летательного аппарата, тем самым выполняется формирование в памяти бортовой системы управления летательного аппарата исходных данных о динамических параметрах летательного аппарата и опорных точках траектории.
7. Средствами бортовой системы управления осуществляется глобальное планирование программной траектории движения летательного аппарата для каждого кусочно-постоянного отрезка (полуинтервала) траектории по матричной формуле (3):

с подстановкой в результат 
где  - функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - аналитическая матричная экспонента от матрицы в форме Фробениуса
- аналитическая матричная экспонента от матрицы в форме Фробениуса 
 соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
 - значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем
- матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем 
 - матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
- матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
 - численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории
- численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории 
Т1, …, Tq - моменты времени полета летательного аппарата - точки разрыва траектории, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата.
8. Функции  записываются в память вычислительных средств бортовой системы управления летательного аппарата, они являются результатом предполетного - глобального планирования траектории движения летательного аппарата.
записываются в память вычислительных средств бортовой системы управления летательного аппарата, они являются результатом предполетного - глобального планирования траектории движения летательного аппарата.
После начала движения летательного аппарата по программной траектории движения средствами бортовой системы управления летательного аппарата при помощи метода пропорционального сближения осуществляется отслеживание в каждый рассматриваемый текущий момент времени t положения и компенсацию с приемлемой точностью ухода центра масс летательного аппарата относительно j-й программной траектории движения  при соблюдении условий достижения минимальной методической ошибки управления и исключения «срыва» летательного аппарата с программной траектории.
при соблюдении условий достижения минимальной методической ошибки управления и исключения «срыва» летательного аппарата с программной траектории.
В случае возникновения необходимости оперативного изменения программной траектории движения летательного аппарата в условиях полета на первом кусочно-постоянном - начальном отрезке траектории [Т0, T1] с использованием вычислительных средств бортовой системы управления:
1. Корректируется матрица-столбец значений координат в опорных точках траектории COORD в части элементов, у которых изменились параметры (координаты) опорных точек траектории 
Если координата опорной точки траектории не изменилась либо опорная точка траектории на момент возникновения необходимости изменения программной траектории фактически была пройдена, то соответствующий элемент матрицы COORD не перевычисляется. Общее количество опорных точек траектории движения не должно изменяться.
2. Откорректированная матрица COORD записывается в память вычислительных средств бортовой системы управления летательного аппарата.
3. Средствами бортовой системы управления осуществляется динамическая коррекция программной траектории движения летательного аппарата - локальное планирование траектории движения летательного аппарата единовременно для всех опорных точек траектории (планируемых и фактически пройденных) по матричной формуле (3):

с подстановкой в результат c 
где  - непрерывные функции от времени, проходящие через все опорные точки траектории (планируемые и фактически пройденные) и описывающие программную траекторию движения летательного аппарата с учетом текущей динамической коррекции.
- непрерывные функции от времени, проходящие через все опорные точки траектории (планируемые и фактически пройденные) и описывающие программную траекторию движения летательного аппарата с учетом текущей динамической коррекции.
4. Функции  записываются в память вычислительных средств бортовой системы управления летательного аппарата, они являются результатом локального планирования траектории движения летательного аппарата.
записываются в память вычислительных средств бортовой системы управления летательного аппарата, они являются результатом локального планирования траектории движения летательного аппарата.
Дальнейшее движение летательного аппарата по откорректированной программной траектории движения осуществляется аналогичным способом, как и после глобального планирования траектории.
Использование изобретения в авиационной технике позволяет повысить адекватность глобального и локального планирования траектории движения летательного аппарата средствами бортовой системы управления за счет коррекции исходных данных о динамических параметрах летательного аппарата, изменяемых вследствие уменьшения запасов топлива и массы полезной нагрузки для случая, когда все опорные точки траектории расположены на первом кусочно-постоянном - начальном отрезке траектории, то есть на отрезке, где запас топлива и масса полезной нагрузки принимается неизменными с начала полета летательного аппарата. Изобретение также позволяет повысить топливную эффективность летательных аппаратов, сократить время и точность выполнения летательным аппаратом полетного задания за счет оптимального планирования траектории движения летательного аппарата как в ходе предполетной подготовки, так и в условиях полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2665820C1 |
| СПОСОБ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2649287C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2648556C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| Способ имитации траекторий движения объектов | 2015 |
|
RU2617144C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
Способ управления движением летательного аппарата, включающий предполетную подготовку с использованием математической модели летательного аппарата, в ходе которой осуществляют запись в память бортовой системы управления исходных данных о динамических параметрах летательного аппарата и опорных точках траектории полета в форме матриц: - блочной матрицы-строки базисных функций (BASIS), маршрутной матрицы ROUTE и матрицы-столбца параметров опорных точек траектории COORD, формируют программную траекторию движения летательного аппарата по опорным точкам, с дальнейшим восстановлением в процессе полета траектории движения летательного аппарата плавным переходом между опорными точками. Обеспечивается повышение адекватности глобального и локального планирования траектории движения летательного аппарата средствами бортовой системы управления. 1 ил.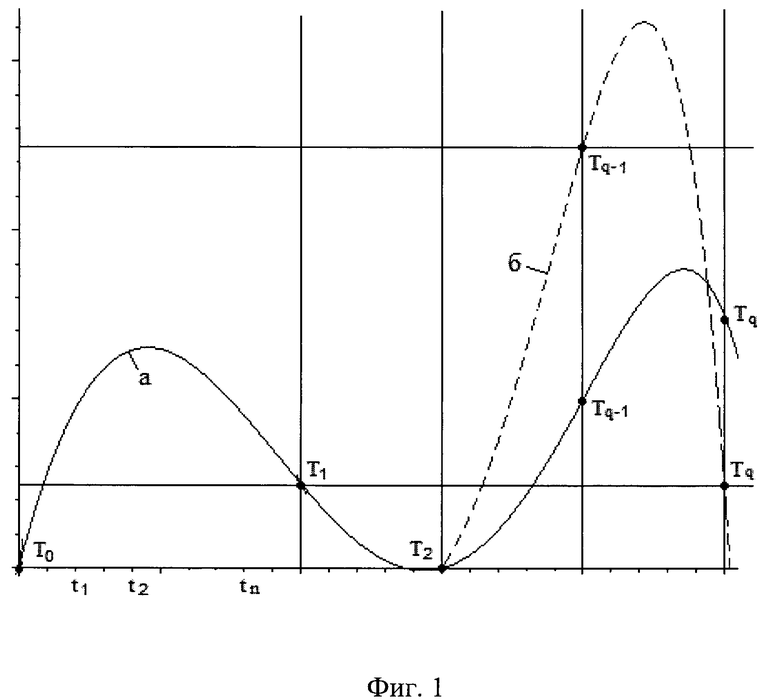
Способ управления движением летательного аппарата, включающий предполетную подготовку с использованием математической модели летательного аппарата, в ходе которой осуществляется запись в память бортовой системы управления исходных данных о динамических параметрах летательного аппарата и опорных точках траектории полета в форме матриц BASIS, ROUTE и COORD, где

- блочная матрица-строка базисных функций, элементы которой вычисляют по формуле 
 - маршрутная матрица, элементы которой вычисляют подстановкой относительного времени начала движения летательного аппарата по маршруту Т0=0 в матрицу BASIS по формуле
- маршрутная матрица, элементы которой вычисляют подстановкой относительного времени начала движения летательного аппарата по маршруту Т0=0 в матрицу BASIS по формуле 
 - матрица-столбец параметров опорных точек траектории, элементы которой соответствуют параметрам опорных точек траектории
- матрица-столбец параметров опорных точек траектории, элементы которой соответствуют параметрам опорных точек траектории 
 - опорные точки траектории, расположенные на первом - начальном отрезке траектории полета летательного аппарата [Т0,T1];
- опорные точки траектории, расположенные на первом - начальном отрезке траектории полета летательного аппарата [Т0,T1];
 - параметры опорных точек траектории;
- параметры опорных точек траектории;
 - время прохождения летательным аппаратом опорных точек траектории;
- время прохождения летательным аппаратом опорных точек траектории;
 - различные корни первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [Т0, Т1] и их кратности;
- различные корни первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [Т0, Т1] и их кратности;
n - порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории;
р - количество различных корней первого характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата на первом кусочно-постоянном - начальном отрезке траектории полета летательного аппарата [Т0,T1],
формирование программной траектории движения летательного аппарата осуществляется по опорным точкам, с дальнейшим восстановлением в процессе полета траектории движения летательного аппарата плавным переходом между опорными точками, отличающийся тем, что до начала движения летательного аппарата выполняется формирование в памяти бортовой системы управления летательного аппарата программной траектории движения по матричной формуле  с подстановкой в результат
с подстановкой в результат  управление движением летательного аппарата в полете осуществляется при помощи метода пропорционального сближения при необходимости с учетом динамической коррекции программной траектории движения летательного аппарата по той же матричной формуле, где
управление движением летательного аппарата в полете осуществляется при помощи метода пропорционального сближения при необходимости с учетом динамической коррекции программной траектории движения летательного аппарата по той же матричной формуле, где  - функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- функция от времени, описывающая траекторию движения летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - аналитическая матричная экспонента от матрицы в форме Фробениуса
- аналитическая матричная экспонента от матрицы в форме Фробениуса 
 соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории;
 - значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
- значения коэффициентов j-го однородного линейного дифференциального уравнения, соответствующего математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории;
 - матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем
- матрица начальных условий к j-му однородному линейному дифференциальному уравнению, соответствующему математической модели летательного аппарата на j-м кусочно-постоянном отрезке (полуинтервале) траектории, причем 
 - матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
- матрица коэффициентов разложения функции на простейшие дроби в форме Быстрова-Тетерина;
 - численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории
- численная матричная экспонента от скалярного произведения матрицы в форме Фробениуса FROBAj, соответствующей j-му кусочно-постоянному отрезку (полуинтервалу) траектории, на длину соответствующего кусочно-постоянного отрезка траектории 
Т1,…, Tq - моменты времени полета летательного аппарата - точки разрыва, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата;
q - количество точек разрыва траектории, в которых происходит изменение исходных данных о динамических параметрах летательного аппарата.
| СПОСОБ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2649287C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2665820C1 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| Устройство для захолаживания вечномерзлых грунтов | 2022 |
|
RU2788722C1 |
| CA 2856439 A1, 13.06.2013. | |||

