Изобретение относится к области приборостроения, а именно к области автоматического регулирования, и может быть использовано в системах высокоточного управления движением центра масс летательных аппаратов.
Известен способ управления движением воздушных объектов, включающий предполетную подготовку и формирование программной траектории движения летательного аппарата по опорным точкам (глобальное планирование траектории) с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками (локальное планирование траектории). Сопряжение двух соседних прямолинейных разнонаправленных участков движения осуществляется дугой окружности (МПК G09B 9/00, А.с. СССР № 991479, опубл. 23.01.1983).
Недостатками этого способа являются:
- низкая точность глобального и локального планирования траектории летательного аппарата из-за игнорирования динамических свойств летательного аппарата и противодействия противника;
- высокая вычислительная трудоемкость локального планирования траектории движения средствами бортовой системы управления из-за необходимости выполнения расчетов для каждой опорной точки траектории.
Известен также способ управления движением воздушного объекта, включающий предполетную подготовку и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками. Сопряжение двух соседних прямолинейных разнонаправленных участков движения осуществляется переходными кривыми, каждая из которых состоит из двух ветвей кубической параболы, сопряженных между собой дугой окружности или совмещенных непосредственно (МПК G01С 21/00, патент РФ № 2419072, опубл. 20.05.2011).
Способ имеет недостатки:
- низкая точность глобального и локального планирования траектории движения летательного аппарата из-за игнорирования динамических свойств летательного аппарата и противодействия противника;
- высокая вычислительная трудоемкость локального планирования траектории движения средствами бортовой системы управления из-за необходимости выполнения расчетов для каждой опорной точки траектории.
Наиболее близким к заявленному способу является способ управления движением летательного аппарата, включающий предполетную подготовку с использованием математической модели летательного аппарата и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками. Причем в ходе предполетной подготовки из всего массива опорных точек сформированной программной траектории производится выбор нескольких узловых точек, в которых происходит смена знака любого из параметров летательного аппарата и их производных по времени с отрицательного на положительное значение и наоборот. Параметры выбранных точек до начала движения вводят в память бортового вычислительного устройства летательного аппарата в форме матрицы, при этом после начала движения участки заданной траектории между узловыми точками аппроксимируют с помощью кубического сплайна Эрмита, а управление движением летательного аппарата осуществляют при помощи метода пропорционального сближения (МПК G05D 1/00, F42B 15/00, патент РФ № 2571567, опубл. 20.12.2015).
Этот способ решает задачу глобального планирования траектории летательного аппарата с учетом динамических свойств летательного аппарата, однако его недостатками являются:
- низкая точность глобального планирования траектории движения из-за использования приближенных численных методов математического моделирования динамических свойств летательного аппарата;
- низкая точность локального планирования траектории движения из-за игнорирования динамических свойств летательного аппарата и противодействия противника;
- неадекватность результатов глобального и локального планирования траектории движения из-за исключения части опорных точек из рассмотрения по причине их несоответствия требованиям, предъявляемым к узловым точкам;
- высокая вычислительная трудоемкость локального планирования траектории движения средствами бортовой системы управления из-за необходимости выполнения расчетов для каждой узловой точки траектории.
Технической задачей заявляемого изобретения является повышение точности и адекватности глобального и локального планирования траектории движения летательного аппарата в соответствии с полетным заданием при снижении вычислительной трудоемкости восстановления траектории средствами бортовой системы управления.
Поставленная задача решается следующим образом.
В способе планирования траектории движения летательного аппарата, включающем предполетную подготовку с использованием математической модели летательного аппарата и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками, дополнительно выполняют в ходе предполетной подготовки до начала движения летательного аппарата формирование в памяти бортовой системы управления летательного аппарата исходных данных о динамических параметрах летательного аппарата и опорных точках траектории в форме матриц  ,
,  и
и  , а также формирование программной траектории движения летательного аппарата по матричной формуле
, а также формирование программной траектории движения летательного аппарата по матричной формуле  , управление движением летательного аппарата в полете осуществляют при помощи метода пропорционального сближения, при необходимости, с учетом динамической коррекции программной траектории движения летательного аппарата по матричной формуле , где
, управление движением летательного аппарата в полете осуществляют при помощи метода пропорционального сближения, при необходимости, с учетом динамической коррекции программной траектории движения летательного аппарата по матричной формуле , где  - блочная матрица-строка базисных функций, элементы которой вычисляются по формуле
- блочная матрица-строка базисных функций, элементы которой вычисляются по формуле  ;
;  - блочная маршрутная матрица в форме Тетерина, в которой
- блочная маршрутная матрица в форме Тетерина, в которой  - блок, соответствующий опорным точкам траектории, в которых заданы параметры опорных точек траектории в виде значений координат положения, скорости и ускорения летательного аппарата, строится как композиция корневых субблоков
- блок, соответствующий опорным точкам траектории, в которых заданы параметры опорных точек траектории в виде значений координат положения, скорости и ускорения летательного аппарата, строится как композиция корневых субблоков  , строение первого столбца каждого субблока в точности повторяет строение матрицы Вандермонда, первая строка каждого субблока унитарная с единицей в первой позиции, остальные элементы каждого субблока вычисляются по рекуррентной формуле
, строение первого столбца каждого субблока в точности повторяет строение матрицы Вандермонда, первая строка каждого субблока унитарная с единицей в первой позиции, остальные элементы каждого субблока вычисляются по рекуррентной формуле  ;
;  - блок, соответствующий оставшимся опорным точкам траектории, в которых заданы параметры опорных точек траектории только в виде значений координат положения летательного аппарата, строится подстановкой времени прохождения контрольных точек маршрута в матрицу по формуле
- блок, соответствующий оставшимся опорным точкам траектории, в которых заданы параметры опорных точек траектории только в виде значений координат положения летательного аппарата, строится подстановкой времени прохождения контрольных точек маршрута в матрицу по формуле  ;
;  - блочная матрица-столбец значений параметров опорных точек траектории, элементы первого блока
- блочная матрица-столбец значений параметров опорных точек траектории, элементы первого блока  находятся по формуле
находятся по формуле  , а второго блока
, а второго блока  по формуле
по формуле  ;
;  - функция от времени, описывающая траекторию движения летательного аппарата;
- функция от времени, описывающая траекторию движения летательного аппарата;  - порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории;
- порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории;  - значения параметров опорных точек траектории;
- значения параметров опорных точек траектории;  и
и  - различные корни характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата и их кратности;
- различные корни характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата и их кратности;  - количество различных корней характеристического полинома.
- количество различных корней характеристического полинома.
Совокупность отличительных признаков заявляемого изобретения обеспечивает выполнение поставленной технической задачи.
Из изученной научно-технической и патентной информации авторам не известен способ с указанными в формуле изобретения отличительными признаками, это дает основание сделать вывод о соответствии заявляемого способа критериям изобретения.
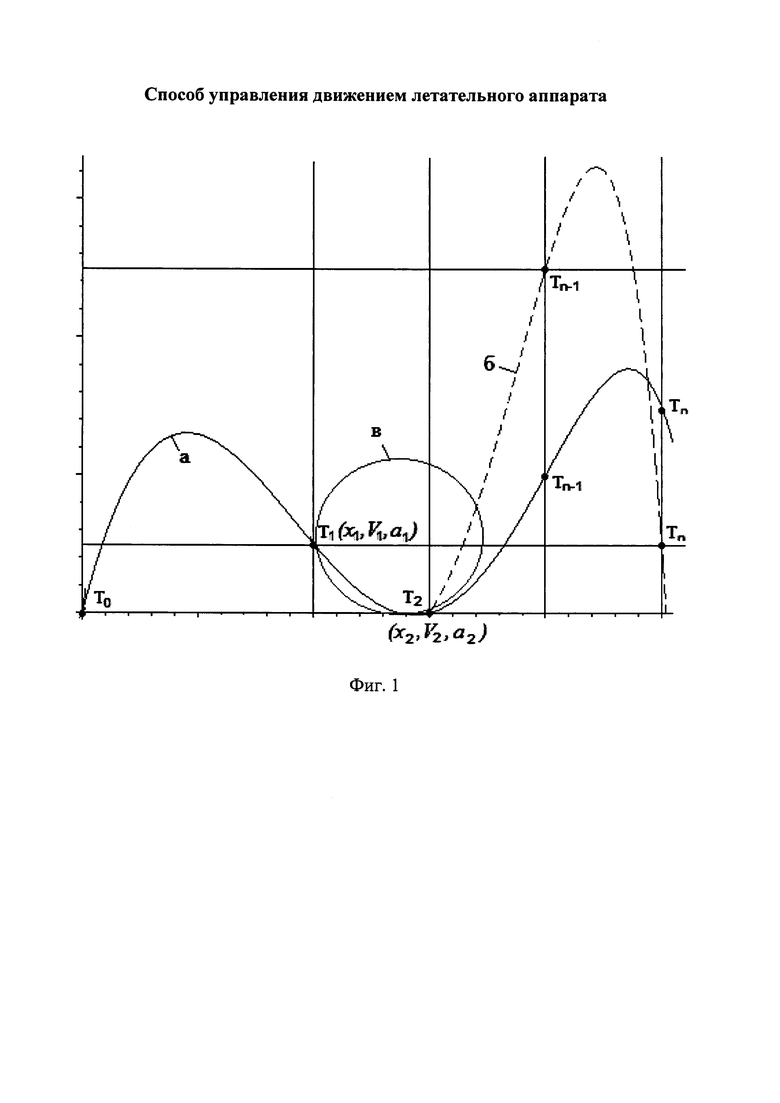
Заявленное изобретение поясняется фиг. 1, где показаны опорные точки траектории (Т0 … Тn), в т.ч. в которых заданы расчетные значения скорости и ускорения летательного аппарата (Т1, Тn), необходимые для обеспечения безопасного преодоления зоны противовоздушной и/или противоракетной обороны противника (в - зона действия средств противовоздушной и/или противоракетной обороны противника), и программная траектория движения летательного аппарата с учетом динамической коррекции в полете (а - траектория, построенная в результате глобального планирования, б - траектория, построенная в результате локального планирования).
Способ осуществляется следующим образом.
В ходе предполетной подготовки, до начала движения по траектории, с использованием вычислительных средств бортовой системы управления или наземных средств баллистико-навигационного обеспечения полетов летательного аппарата:
1. По имеющейся приближенной математической модели летательного аппарата, представленной в виде однородного обыкновенного дифференциального уравнения n-го порядка или системы из n однородных дифференциальных уравнений первого порядка в форме Коши или в виде матрицы системы размерностью n × n, где n - порядок математической модели летательного аппарата, совпадающей с количеством опорных точек траектории, строится характеристический полином вида  , где
, где  - постоянные коэффициенты
- постоянные коэффициенты ,
,  - независимая переменная (параметр интегрального преобразования Лапласа).
- независимая переменная (параметр интегрального преобразования Лапласа).
Если порядок математической модели меньше количества опорных точек траектории, с использованием положений теории обыкновенных дифференциальных уравнений предварительно строится эквивалентная математическая модель летательного аппарата необходимой размерности.
2. Аналитическими методами вычисляются различные корни характеристического полинома и их кратности , где  -
-  -й корень полинома;
-й корень полинома;  - кратность i-го корня полинома; - количество различных корней полинома.
- кратность i-го корня полинома; - количество различных корней полинома.
3. Строится блочная матрица-строка базисных функций .
Для частного случая простых корней характеристического полинома ( ) матрица
) матрица  , где
, где  - -я базисная функция, соответствующая корню .
- -я базисная функция, соответствующая корню .
Для случая кратных корней полинома ( ) матрица строится в порядке следования корней и возрастания номера корневой модификации базисной функции:
) матрица строится в порядке следования корней и возрастания номера корневой модификации базисной функции:
 ,
,
где  .
.
Т.е.: 
где
;
 .
.
4. Формируется маршрутная матрица в форме Тетерина .
Матрица имеет вид , где - первый блок, соответствующий точкам траектории, в которых заданы координата, скорость и ускорение летательного аппарата; - второй блок, соответствующим оставшимся точкам траектории, в которых заданы только значения координат.
Элементы первого блока вычисляются по корням с учетом их кратности . Если все корни полинома простые, то строение блока совпадает с известной матрицей Вандермонда (Вандервуда)
 .
.
В случае наличия кратных корней первый блок строится как композиция корневых субблоков в порядке следования корней. Строение первого столбца субблока в точности повторяет случай простого корня. Первая строка унитарная с единицей в первой позиции. Остальные элементы субблока вычисляются по реккурентной формуле
.
Элементы второго блока вычисляются подстановкой времени прохождения контрольных точек маршрута в матрицу по формуле
,
где  - время прохождения j-й контрольной точки маршрута.
- время прохождения j-й контрольной точки маршрута.
5. Формируется блочная матрица-столбец значений координат, скоростей и ускорений, соответствующих блоку  и координат, соответствующих блоку
и координат, соответствующих блоку  в контрольных точках маршрута на плоскости в порядке их следования
в контрольных точках маршрута на плоскости в порядке их следования  где элементы первого блока находятся по формуле , а второго блока по формуле .
где элементы первого блока находятся по формуле , а второго блока по формуле .
6. Матрицы , и записываются в память вычислительных средств бортовой системы управления летательного аппарата.
7. Средствами бортовой системы управления осуществляется глобальное планирование траектории движения летательного аппарата единовременно для всех опорных точек траектории по матричной формуле
,
где - непрерывная функция от времени, проходящая через все опорные точки траектории и описывающая программную траекторию движения летательного аппарата с учетом динамических свойств летательного аппарата и противодействия противника. Противодействия противника учитывается (нейтрализуется) за счет планирования такой траектории движения, которая обеспечивает безопасное преодоление летательным аппаратом зон поражения средствами противовоздушной и/или противоракетной обороны противника.
8. Функция записывается в память вычислительных средств бортовой системы управления летательного аппарата и является результатом глобального планирования траектории движения летательного аппарата.
После начала движения летательного аппарата по программной траектории движения средствами бортовой системы управления летательного аппарата осуществляется отслеживание в каждый рассматриваемый текущий момент времени  положения, скорости, ускорения аппарата, компенсация с приемлемой точностью ухода центра масс летательного аппарата относительно программной траектории движения , при соблюдении условий достижения минимальной методической ошибки управления и исключения «срыва» летательного аппарата с программной траектории.
положения, скорости, ускорения аппарата, компенсация с приемлемой точностью ухода центра масс летательного аппарата относительно программной траектории движения , при соблюдении условий достижения минимальной методической ошибки управления и исключения «срыва» летательного аппарата с программной траектории.
В случае возникновения необходимости оперативного изменения программной траектории движения летательного аппарата в условиях полета, в т.ч. из-за обнаружения внеплановых зон поражения противовоздушных и/или противоракетных средств противника, с использованием вычислительных средств бортовой системы управления:
1. Корректируется обобщенная матрица Вандермонда в форме Тетерина в части перевычисления значений элементов, у которых изменились параметры опорных точек траектории.
Общее количество опорных точек траектории движения не должно изменяться.
2. Корректируется матрица-столбец в части значений элементов, у которых изменились параметры (координаты, скорости и ускорения).
3. Откорректированные матрицы и записываются в память вычислительных средств бортовой системы управления летательного аппарата.
4. Средствами бортовой системы управления осуществляется локальное планирование траектории движения летательного аппарата единовременно для всех опорных точек траектории (планируемых и фактически пройденных) по матричной формуле
,
где - непрерывная функция от времени, проходящая через все опорные точки траектории (планируемые и фактически пройденные) и описывающая программную траекторию движения летательного аппарата с учетом текущей динамической коррекции.
8. Функция записывается в память вычислительных средств бортовой системы управления летательного аппарата и является результатом локального планирования траектории движения летательного аппарата.
Дальнейшее движение летательного аппарата по откорректированной программной траектории движения осуществляется аналогичным способом, как и после глобального планирования траектории.
Данный способ по сравнению с прототипом позволяет:
- использовать преимущества аналитического (точного) матричного метода и избавиться от влияния методических ошибок приближенных численных методов математического моделирования динамических свойств летательного аппарата, что повышает точность глобального и локального планирования траектории движения летательного аппарата;
- учитывать необходимые значения скорости и ускорения летательного аппарата в опорных точках траектории, что позволяет обеспечить безопасное преодоление зон противовоздушной и/или противоракетной обороны противника;
- учитывать все опорные точки траектории движения летательного аппарата как в процессе предполетной подготовки, так и при динамической коррекции траектории после начала движения летательного аппарата, что обеспечивает соответствие (адекватность) результатов глобального и локального планирования траектории движения полетному заданию;
- выполнять математическое моделирование динамических свойств и расчет траектории движения летательного аппарата единовременно для всех опорных точек с помощью матричных вычислений без использования операций подстановок, решения алгебраических уравнений, прямого дифференцирования и приведения подобных членов, что снижает вычислительную трудоемкость локального планирования траектории движения средствами бортовой системы управления.
Использование изобретения в авиационной технике позволяет повысить топливную эффективность и живучесть летательного аппарата, сократить время и повысить точность выполнения им полетного задания за счет оптимального планирования траектории движения как в ходе предполетной подготовки, так и в условиях полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2648556C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2768079C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2665820C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
Изобретение относится к способу управления движением летательного аппарата (ЛА). Для управления движением ЛА проводят предполетную подготовку с использованием математической модели ЛА, формируют в памяти бортовой системы управления исходные данные о динамических параметрах ЛА и опорных точек в виде матриц, формируют программную траекторию движения ЛА по опорным точкам, в процессе полета восстанавливают траекторию движения ЛА плавным переходом между опорными точками, управление движением ЛА осуществляют при помощи метода пропорционального сближения и динамической коррекции программной траектории определенным образом. Обеспечивается повышение точности и адекватности формирования траектории в процессе полета ЛА при снижении вычислительной трудоемкости. 1 ил.
Способ управления движением летательного аппарата, включающий предполетную подготовку с использованием математической модели летательного аппарата и формирование программной траектории движения летательного аппарата по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения летательного аппарата плавным переходом между опорными точками, отличающийся тем, что в ходе предполетной подготовки до начала движения летательного аппарата выполняют формирование в памяти бортовой системы управления летательного аппарата исходных данных о динамических параметрах летательного аппарата и опорных точках траектории в форме матриц BASIS, TVAND и COORD, а также формирование программной траектории движения летательного аппарата по матричной формуле y(t)=BASIS × (TVAND-1 × COORD), управление движением летательного аппарата в полете осуществляют при помощи метода пропорционального сближения, при необходимости, с учетом динамической коррекции программной траектории движения летательного аппарата по матричной формуле y(t)=BASIS × (TVAND-1 × COORD), где
 - блочная матрица-строка базисных функций, элементы которой вычисляются по формуле
- блочная матрица-строка базисных функций, элементы которой вычисляются по формуле  ; TVAND ∈ Rn×n=(TVAND1 ∈ Rp×n, TVAND2 ∈ R(n-p)×n) - блочная маршрутная матрица в форме Тетерина, в которой TVAND1 - блок, соответствующий опорным точкам траектории, в которых заданы параметры опорных точек траектории в виде значений координат положения, скорости и ускорения летательного аппарата, строится как композиция корневых субблоков
; TVAND ∈ Rn×n=(TVAND1 ∈ Rp×n, TVAND2 ∈ R(n-p)×n) - блочная маршрутная матрица в форме Тетерина, в которой TVAND1 - блок, соответствующий опорным точкам траектории, в которых заданы параметры опорных точек траектории в виде значений координат положения, скорости и ускорения летательного аппарата, строится как композиция корневых субблоков 
 , строение первого столбца каждого субблока в точности повторяет строение матрицы Вандермонда, первая строка каждого субблока унитарная с единицей в первой позиции, остальные элементы каждого субблока вычисляются по рекуррентной формуле
, строение первого столбца каждого субблока в точности повторяет строение матрицы Вандермонда, первая строка каждого субблока унитарная с единицей в первой позиции, остальные элементы каждого субблока вычисляются по рекуррентной формуле  ,
,  ; TVAND2 - блок, соответствующий оставшимся опорным точкам траектории, в которых заданы параметры опорных точек траектории только в виде значений координат положения летательного аппарата, строится подстановкой времени прохождения контрольных точек маршрута в матрицу BASIS по формуле
; TVAND2 - блок, соответствующий оставшимся опорным точкам траектории, в которых заданы параметры опорных точек траектории только в виде значений координат положения летательного аппарата, строится подстановкой времени прохождения контрольных точек маршрута в матрицу BASIS по формуле  ,
,  ; COORD ∈ Rn×1=(ci,1)=(COORD1 ∈ Rp×1, COORD2 ∈ R(n-p)×1) - блочная матрица-столбец значений параметров опорных точек траектории, элементы первого блока COORD1 находятся по формуле ci,1=yi,
; COORD ∈ Rn×1=(ci,1)=(COORD1 ∈ Rp×1, COORD2 ∈ R(n-p)×1) - блочная матрица-столбец значений параметров опорных точек траектории, элементы первого блока COORD1 находятся по формуле ci,1=yi,  , а второго блока COORD2 по формуле ci,1=yi,
, а второго блока COORD2 по формуле ci,1=yi,  ; y(t) - функция от времени, описывающая траекторию движения летательного аппарата; n - порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории; y1, …, yn - значения параметров опорных точек траектории; λ1, λ2, …, λp и m1, m2, …, mр - различные корни характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата и их кратности; p - количество различных корней характеристического полинома.
; y(t) - функция от времени, описывающая траекторию движения летательного аппарата; n - порядок математической модели летательного аппарата, который соответствует количеству опорных точек траектории; y1, …, yn - значения параметров опорных точек траектории; λ1, λ2, …, λp и m1, m2, …, mр - различные корни характеристического полинома однородного обыкновенного дифференциального уравнения, соответствующего математической модели летательного аппарата и их кратности; p - количество различных корней характеристического полинома.
| СПОСОБ ИМИТАЦИИ ТРАЕКТОРИЙ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2419072C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| WO 2000065417 A1, 02.11.2000 | |||
| US 20090177339 A1, 09.07.2009. | |||

