Изобретение относится к области космической техники и может быть использовано для коллокации (баллистического обеспечения гарантированного сосуществования) в одной и той же области околостационарной орбиты (ОСО) по долготе и широте относительно точки стояния космических аппаратов (КА).
КА на ОСО называются геостационарными КА. В тексте под КА следует понимать геостационарный КА. ОСО – реальная орбита геостационарного КА; геостационарная орбита (ГСО) – идеализация ОСО. В практическом плане ГСО тождественно ОСО.
Технической проблемой при эксплуатации КА на ОСО является нахождение этого КА в узком диапазоне долгот в состоянии коллокации с тремя и более КА. Никаких способов многоцелевой коллокации не существует. Как там, в этой долготной области сосуществуют КА, и подчас КА, принадлежащие различным государствам – вопрос пока риторический, но с любой стороны настоятельно требуется некий регламент ответственной коллокации.
Коллокацию КА можно проводить по согласованным схемам, известным предприятию. Эти схемы сводятся к равноудалению точек прицеливания векторов еn [еn; (Ω+ω)n] (n =1,2,…) и in [in; Ωn] (n =1,2,…) в соответствующих фазовых плоскостях (ФП) КА и поддержанию концов векторов еn и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом согласованной коллокации считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю или 180°. Для трех КА цифру 180 в отношении точек прицеливания заменяют на 120. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации. Коллокация здесь рассматривается как способ управления движением центров масс, гарантирующий от столкновений КА. Эта задача актуальна и удовлетворительно решается для двух КА (даже при нулевых наклонениях) при условиях:
Ω1 ≈ Ω2 и: ω1 ≈ 0, ω2 ≈ 
Ω1 ≈ Ω2 +
то есть тогда, когда восходящие узлы орбит разнесены на 180°, для каждой из орбит линия узлов совпадает с линией апсид, направления на восходящий узел и перигей одной из орбит совпадают, другой - взаимно противоположны. Гарантированное минимальное межспутниковое расстояние при реальном эксцентриситете орбит КА в состоянии коллокации порядка 0,00015 (эксцентриситет для удержания по долготе в области ±0,05° при этом не более 0,00029) составляет 12,6 км.
Центры управления всеми КА, находящимися в единой области удержания по широте и долготе, следуют единой стратегии коллокации, обмениваясь баллистической информацией.
Метод согласованной коллокации является универсальным, то есть независимым от типа КА, участвующих в совместном удержании. В процессе совместного функционирования КА точки прицеливания, а в идеале и текущие векторы наклонения и эксцентриситета орбит КА, должны изменяться синфазно в заданной области удержания относительно точки стояния. Благодаря такой стратегии поддержания будет постоянно обеспечиваться наклон между плоскостями орбит, и взаимные расстояния между КА будут не менее допуска (8 - 10 км).
Для гарантированной коллокации требуется перманентный процесс обмена баллистической информацией между центрами управления КА. Такой процесс может давать сбои, и сбои обязательно будут происходить. Кроме того, нельзя исключать принципиальную невозможность взаимодействия между центрами управления КА. Проще находиться в состоянии автономной коллокации (самоколлокации): когда к процессу коллокации не привлекаются другие КА и их центры управления. При постановке такой задачи следует учитывать, что линия узлов и линия апсид орбиты смежных КА (СКА) могут пересекаться под произвольным углом.
Идея автономной коллокации, не накладывающей никаких сколько-нибудь значимых обязательств на центр управления СКА (что означает наличие или отсутствие действий по реализации согласованной стратегии коллокации со стороны такого центра управления), представляется актуальной и наиболее эффективной.
Далее по тексту под смежным КА (СКА) подразумевается КА, с которым следует находиться в состоянии коллокации, и под КА с самоколлокацией (КАСК) подразумевается КА, «взявший» на себя всю ответственность за коллокацию в заданной области удержания (ОУ) по широте и долготе. Все КА, находящиеся в единой ОУ, по отношению друг к другу СКА.
Известен способ мониторинговой коллокации на ГСО (RU №2558959 С2). Согласно данному способу, включающему переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, для организации автономной от СКА коллокации за время до приведения мониторингового КА (МКА) (КАСК в части баллистического обеспечения) в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс СКА, в процессе удержания уточняют положение центра области прицеливания по наклонению смежного КА, проведением коррекций наклонения вектор наклонения орбиты МКА в фазовой плоскости (ФП) выставляют так, чтобы линия узлов орбиты МКА стала перпендикулярна линии узлов орбиты смежного КА и наклонение (imin) орбиты МКА относительно орбиты СКА составляло не менее (14-15) угл.с., проводят коррекции вектора эксцентриситета:
- чтобы сумма эксцентриситетов орбит МКА и СКА составляла порядка 4∙10-4;
- для удаления направления на перигей от направления на восходящий узел орбиты МКА на величину угла рассогласования (УР) между направлениями на перигей и восходящий узел орбиты СКА;
- для поддержания такого положения перигея заданных пределах области прицеливания по эксцентриситету,
проводят регулярные комплексные коррекции наклонения орбиты МКА:
- для поддержания прямого угла между линиями узлов орбит КА в заданных пределах области прицеливания по наклонению;
- для устранения вековой составляющей ухода по наклонению;
- для превышения imin,
проводят коррекции долготы (периода) для того, чтобы начало координат [ΔL;ΔR – соответственно отклонение вдоль орбиты и отклонение по радиус-вектору] совпадало в заданных пределах с центром эллипса дистанцирования от СКА, на МКА переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты МКА при корректировке стратегии управления движением центра масс СКА и при нарастании УР МКА и СКА, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
Известен способ автономной коллокации на ГСО (RU №2559371 C2), включающий переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных параметров каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, согласно которому за время до приведения КАСК в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс СКА, в процессе удержания уточняют положение центра области прицеливания по наклонению СКА, проведением коррекций наклонения вектор наклонения орбиты КАСК в ФП с учетом сезона (текущего прямого восхождения Солнца) выставляют так, чтобы линия узлов орбиты КАСК стала перпендикулярна линии узлов орбиты СКА и центр области прицеливания, включающей годограф вектора наклонения орбиты КАСК, смещают по перпендикуляру из начала координатной системы [ix;iy] относительно линии, соединяющей это начало с центром области прицеливания СКА, на величину расстояния между этим центром и началом координатной системы, проводят регулярные коррекции эксцентриситета для удаления направления на перигей от направления на восходящий узел орбиты КАСК на величину УР между направлениями на перигей и восходящий узел орбиты СКА и поддержания такого положения перигея заданных пределах области прицеливания по эксцентриситету, проводят регулярные коррекции наклонения орбиты КАСК, вызывающие, при поддержании прямого угла между линиями узлов орбит КА, следование конца вектора наклонения его годографу, на КАСК переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты КАСК при корректировке стратегии управления движением центра масс СКА и при нарастании УР КАСК, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
В основу аналога 2 и аналога 3, в части баллистического обеспечения, положена концепция:
Баллистические сведения о СКА и задачу разнесения векторов наклонения и эксцентриситета в режиме автономной коллокации возможно получать и решать, например, по орбитальным данным от международной системы слежения за спутниками, раскрывающим тактику и стратегию удержания СКА.
Минимальное межспутниковое расстояние при выполнении условия (3) 8 км.
Ввиду того, что моменты прохождения аппаратами плоскости экватора разнесены на порядка 6 ч, КА не создают взаимных помех в работе по целевому назначению.
Автономная коллокация на принципах (2) позволяет также рассогласование по любому из условий (2) относительно номинала 90° до 25°.
Аналог 3 расходится с аналогом 2 баллистическим обеспечением, включающим использование в алгоритмическом представлении в отличие от эллипсов дистанцирования КАСК (МКА) от «чужого» КА в плоскости ХY инерциальной геоцентрической системы координат годографов принудительной эволюции вектора наклонения.
И все же, в приведенных выше способах автономной коллокации необходима подстройка под текущие параметры орбиты СКА: УР СКА должен быть равен УР КАСК.
Из уровня техники известен способ коллокации разнесением двух КА по гринвичской долготе. Этот способ взят за прототип. С помощью двигателей малой тяги проводят коррекции удержания КА по гринвичской долготе, эксцентриситету и широте (наклонению). Достоинством способа является (при существовании буферной зоны порядка не менее суммарной погрешности знания текущего положения обоих КА по долготе по наихудшему варианту) полная независимость КА друг от друга. Способ предполагает, что оба КА добровольно делят между собой номинальную область удержания по долготе примерно на равные части. Недостатками данного аналога являются слишком узкая в итоге область удержания по долготе для каждого из КА и, как следствие, повышенный расход топлива на коррекции уклонения и повышенные риски критического сближения аппаратов, либо невозможность гарантированного разнесения по долготе. В данной области по долготе на момент начала коллокации могут находиться уже не один, и не два КА. Однако, если для каждого из двух КА собственная область удержания по долготе составит ±0,05°, функционирование каждого их них на своих рабочих позициях будет успешным.
Для заявленного способа автономной коллокации на околостационарной орбите выявлены самые общие признаки, такие как: измерения параметров орбиты каждого КА; определение по ним текущих значений орбитальных элементов каждого КА, уточнение тяги двигателей коррекции и проведение коррекций орбиты. Такие признаки присутствуют явно или неявно в любом способе баллистического обеспечения полета любого КА и не являются отличительными признаками того или иного изобретения по отношению к прочим. Существенным признаком для ограничительной части формулы изобретения следует считать выявление стратегии управления движением центра масс СКА.
Задачей изобретения является автономная коллокация при наличии в узкой области орбитальной позиции без КАСК 1, 2 и, что особенно важно, – трех и более КА.
Решение поставленной задачи заключается в том, что в способе автономной коллокации на околостационарной орбите, включающем выявление за время приведения космического аппарата (КА) с самоколлокацией (КАСК) в заданную область удержания по широте и долготе (ОУ) относительно точки стояния по данным независимых траекторных измерений стратегий управления движением центров масс смежных КА (СКА), измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, уточнение тяги двигателей коррекции и проведение коррекций орбиты КАСК, в том числе – коррекций уклонения, при рассмотрении возможности постановки КАСК в заданную ОУ по долготе определяют номинальный трасс-эллипс полета (НТЭП) КАСК, представляющий уточненную ОУ КАСК в ее номинальном (нейтральном) положении по долготе, для чего половину общей ширины реальной рабочей ОУ (РРОУ) по долготе центров масс всех СКА, находящихся вблизи точки стояния, задают (назначают) одной из полуосей НТЭП, в качестве другой полуоси НТЭП задают наклонение равное четырехкратной РРОУ по долготе, определяют стратегии управления центрами масс дальних СКА (если они есть) в ОУ, прилегающих с обеих сторон по долготе к заданной ОУ, за время приведения КАСК в заданную ОУ проводят коррекции наклонения и вектора эксцентриситета с тем, чтобы наклонение орбиты КАСК стало равным четырехкратной РРОУ по наклонению, аргумент широты перигея орбиты КАСК стал равным π/2 или 3π/2, и двойной модуль эксцентриситета на момент начала этапа удержания КАСК в заданной ОУ составил величину эквивалентную долготной полуоси НТЭП, удержание КАСК и автономную коллокацию проводят совмещенными (одновременными) коррекциями периода (долготы), векторов наклонения и эксцентриситета последовательными включениями из выбранной диагональной пары двигателей наклонения на обоих внутри витка оптимальных для компенсации вековых уходов вектора наклонения активных участках, при этом выбор пары двигателей наклонения и очередность их работы определяют, исходя из стратегии эффективной компенсации суточных изменений эксцентриситета, в случаях возникновения опасности критического сближения КАСК с СКА проводят коррекции уклонения, представляющие собой несрочные – совмещенные с коррекциями наклонения, или самостоятельные (срочные) коррекции периода, а также коррекции среднего эксцентриситета орбиты, трансформирующие долготную ось трасс-эллипса, с последующим возвратом трассы полета КАСК к НТЭП и установкой НТЭП в оптимальное положение в отсутствие опасности критического сближения КАСК с СКА.
Суть изобретения заключается в организации движения КАСК по трассе, всегда
находящейся посредством штатных орбитальных маневров в узкой приграничной
полосе движения.
Техническим результатом настоящего изобретения является нахождение КАСК в согласованных границах по широте и долготе при соблюдении коллокации с количеством СКА, большим двух.
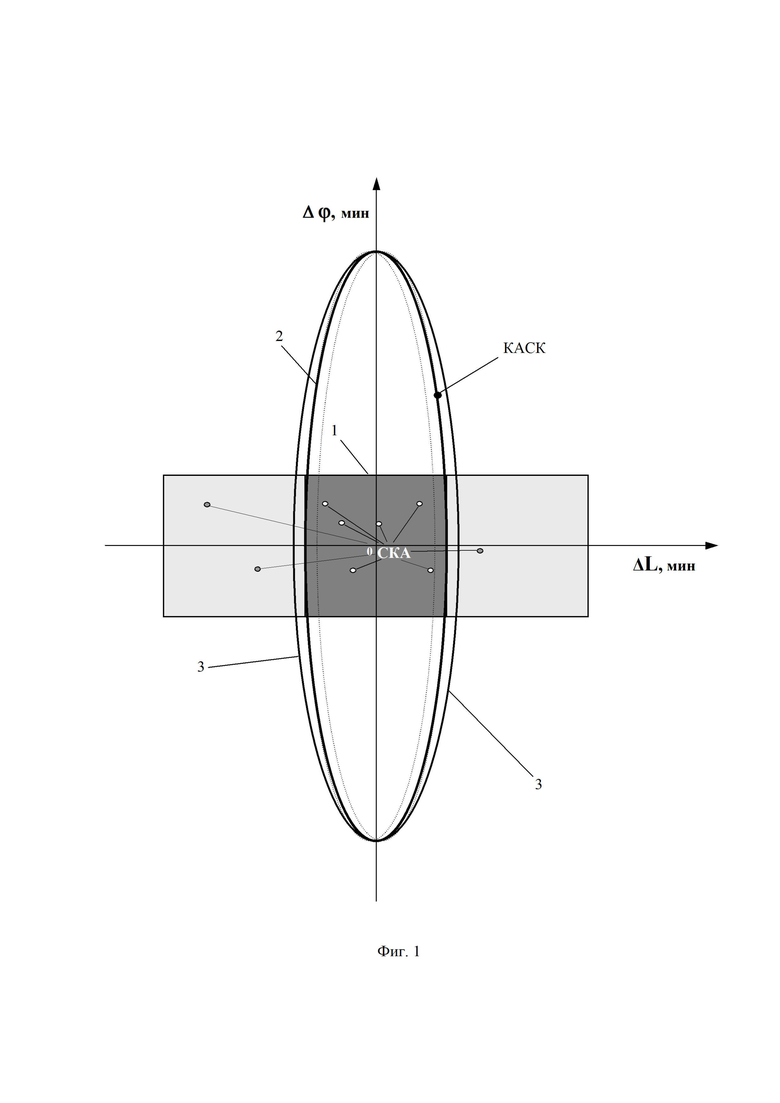
На фиг. 1 показана принципиальная схема коллокации. Введены следующие обозначения:
1 – РРОУ по долготе и наклонению;
2 – НТЭП (граница ОУ КАСК);
3 – положение НТЭП при увеличении эксцентриситета.
На фиг. 1 пунктирными линиями обозначены трасс-эллипсы при проведении (совместно или раздельно) коррекций и периода, и эксцентриситета.
Заявленный способ решает задачу сосуществования запущенного на ОСО и приведенного в заданную ОУ КА, когда в этой самой ОУ уже находятся (каким образом – не важно) слишком много КА, чтобы каким-либо известным способом решать эту задачу в пользу новоявленного КА. Основу заявленному способу коллокации составляют следующие бесспорные соображения.
1. Регламентом электросвязи для КА с совпадающими частотами определяется долготное разнесение порядка градусов. Кто думает находиться в узкой ОУ, уже занятой несколькими КА, следует подготовится к работе со сдвигом частот, гарантирующим нормальную работу по целевому назначению.
2. Если нельзя находиться внутри РРОУ, можно находиться снаружи и именно - на границе.
3. На целевую задачу не влияет величина наклонения орбиты КАСК, потому как при директивных наклонении и долготе не более 0,1° наклонение в 0,4° в техническом и технологическом плане также ничтожно. На борту КАСК в этом случае не потребуются (если их не было) установка поворотных устройств ни для антенн связи, ни для антенн командно-измерительной системы. Ширина ОУ по наклонению является скорее самоограничением.
4. Погрешность определения наиболее проблемного положения – вдоль орбиты составляет не более 3 км. Это небольшая величина, и положение КАСК на границе можно считать вполне определенным и ответственным. Так же ответственно, сознавая свои погрешности положения, должны и СКА приближаться изнутри и извне РРОУ к ее границам по долготе. КАСК, в пределах эволюции по долготе в рамках удержания и уклонения и с учетом погрешности определения положения КАСК, будет ежесуточно находится на обеих границах по долготе, поскольку реальная граница – это всегда не линия, а полоса отчуждения.
Технический результат изобретения обеспечивается выполнением следующей последовательности операций:
1. По данным независимых траекторных измерений определяют директивную РРОУ 1 центров масс СКА.
Баллистические сведения о СКА возможно получать, например, по орбитальным данным от международной системы слежения за спутниками, позволяющим раскрыть стратегию удержания СКА.
2. Для КАСК определяют НТЭП.
Сутью изобретения является представление ОУ КАСК как места положений трасс-эллипсов в координатах [Δϕ;ΔL] с одной полуосью равной ΔLСКА max ± Δ, где Δ – степень свободы по долготе вследствие удержания и погрешности положения КАСК, и другой полуосью равной 4ΔLСКА max. Трасса нейтрального положения есть НТЭП 2. Геометрия НТЭП такова, что граничные стороны прямоугольника РРОУ 1 с достаточно высокой степенью точности (до 1,7% от ширины РРОУ на ее краях) совпадают с соответствующими участками НТЭП. Потому и выбрана величина большой полуоси НТЭП 4ΔLСКА max. В течение звездных суток (за виток) КА на ОСО, имея такую ОУ, совершает полный обход ОУ, при соответствующей настройке ни разу не заходя внутрь РРОУ 1, в которой эволюционируют ближние СКА. При нахождении КАСК в заданной (назначенной) ОУ и вне РРОУ 1 автономность коллокации в отношении РРОУ полностью соблюдаются. Что касается СКА, чьи ОУ примыкают к РРОУ, то, во-первых, их может и не быть, а во-вторых, если они есть, то коррекции уклонения редки, и способов уклонения довольно много: и коррекции периода (долготы), и коррекции эксцентриситета, и сочетание тех и других коррекций, и даже коррекции прямого восхождения перигея орбиты КАСК.
3. За время приведения КА в заданную ОУ проводят коррекции наклонения с тем, чтобы наклонение орбиты КАСК стало равным 4ΔLСКА max.
Полетным заданием при выведении КА на ГСО предусмотрен вывод на заданное наклонение орбиты. На устранение ошибок выведения по наклонению, которые составляют не более 0,2°, требуется 10,7 м/с приращения боковой скорости. Такой расход характеристической скорости предусмотрен топливным бюджетом. Значит, по отношению к прототипу дополнительных энергозатрат на выполнение данного пункта не требуется.
4. За время приведения КАСК в заданную ОУ проводят коррекции вектора
эксцентриситета с тем, чтобы аргумент широты перигея орбиты КАСК стал равным π/2 или 3π/2, и двойной модуль эксцентриситета на момент начала этапа удержания КАСК в заданной ОУ составил величину равную половине заданной ОУ по долготе.
На приведение КА на точку стояния или, точнее, в ОУ по долготе закладывается в топливный бюджет расход характеристической скорости КА 4-15 м/с. На поворот линии апсид в наихудшем варианте на 90° при имеющемся для РРОУ по долготе ±0,1° эксцентриситете 0,000873 потребуется 2,1 м/с. Учитывая, что коррекции периода обращения беззатратно могут быть совмешены и совмещаются с коррекциями вектора эксцентриситета, требуемое изменение аргумента широты перигея и модуля эксцентриситета можно проводить в полном объеме.
5. Выявляют стратегии управления центрами масс дальних СКА.
Исполнение операции аналогично п. 1.
6. Проводят удержание КАСК и автономную коллокацию.
НТЭП – неподвижная трасса полета КАСК. Чтобы трассы находились в узкой пограничной полосе отчуждения, надо, чтобы сидерический период обращения был всегда близок к звездным суткам, наклонение, модуль вектора эксцентриситета и прямое восхождение перигея орбиты оставались практически постоянными. На устойчивость удержания и коллокации влияет следующее.
А. Незначительность изменения любого уровня (от короткопериодических до квазивековых изменений) векторов наклонения в отношении возможностей компенсации этих изменений со стороны системы коррекции КАСК. Радиус «солнечного круга» (круга, очерчиваемого концом вектора наклонения в течение полугода при организации компенсаций суточных квазивековых уходов наклонения орбиты КА) порядка 1,5 минут; «солнечный круг» реализуется всегда и всюду на фазовой плоскости [i; Ω], значит, при исходном для НТЭП наклонении никак не меньшем 12 минутам (при РРОУ по широте ±3 минуты) колебания по долготе восходящего узла от данного фактора составят на сроке активного существования КАСК ±7,1°. Сумму долготы восходящего узла и аргумента широты перигея можно поддерживать трояко: компенсировать периодические уходы по Ω; проводить компенсирующие коррекции ω; проводить коррекции вектора эксцентриситета на соответствующую величину Δе. Годовые затраты характеристической скорости составят не более 0,68 м/с, и их можно отнести годовым затратам на удержание только ω.
Б. Стремление и возможность (на перспективу) компенсировать заодно с вектором наклонения или без него любое изменение среднего на витке (сутках) вектора эксцентриситета. Коррекции е проводят, как сказано выше, одновременными коррекциями векторов наклонения, периода (долготы) и векторов эксцентриситета последовательными включениями из выбранной диагональной пары двигателей наклонения на обоих внутри витка оптимальных для компенсации вековых уходов вектора наклонения активных участках, при этом выбор пары двигателей наклонения и очередность их работы определяют, исходя из стратегии эффективной компенсации суточных изменений среднего эксцентриситета. Поскольку требуется стремление к НТЭП, то есть к неподвижности и нетранформируемости трасс-эллипса, большую часть изменений среднего модуля е (максимум порядка 0,00005 по всем направлениям) компенсируется совмещением коррекций векторов среднего эксцентриситета с коррекциями векторов наклонения. Это в пересчете на приращение по долготе и характеристической скорости за сутки составляет соответственно 21 секунду и 0,077 м/с. Непосредственные (реальные) затраты на компенсацию изменений е возникают при наложении ограничения на радиус области прицеливания по эксцентриситету. При радиусе 0,00007, что соответствует 30 секундам по L, частота самостоятельных коррекций е составляет два раза в месяц. В среднем за коррекцию расходуется 0,153 м/с, чтобы изменять эксцентриситет на 0,0001. За год потребуется 3,7 м/с. На удержание КА по долготе в настоящее время и закладывается порядка 3,7 м/с/год. В данном изобретении эти м/с тратить следует (за исключением коррекций уклонения) только на коррекцию е.
В. Стратегия удержания трасс-эллипса в рамках полосы отчуждения предполагает выдачу двух импульсов скорости на витке, гасящих дрейф КАСК по долготе за счет внешних факторов и трансверсальной и радиальной составляющих тяги задействуемых двигателей коррекции. Эти расчетные импульсы практически равны и их обязательно совмещают с коррекциями вектора наклонения.
Таким образом на удержание и автономную коллокацию по наклонению, долготе (периоду) и эксцентриситету не требуется дополнительных затрат, топливный бюджет КАСК остается прежним – как без задачи коллокации.
Чтобы проводить одновременные коррекции периода (долготы) и векторов наклонения и эксцентриситета необходимо каждые сутки выбирать пару двигателей коррекции наклонения, диагонально расположенных относительно оси Z связанной с КА системы координат.
Итак, при штатной эксплуатации КАСК трасс-эллипс может находиться относительно НТЭП на удалении ±30 секунд, а с учетом погрешности положения – на удалении порядка 45 секунд, что соответствует ±9 км вдоль орбиты.
7. В случаях возникновения опасности критического сближения КАСК с СКА проводят коррекции уклонения.
Необходимость в коррекциях уклонения иногда возникает, когда СКА из РРОУ или примыкающих к ней ОУ по каким-либо причинам ведут себя неадекватно, то есть приближаются на критическое расстояние к КАСК. Уклониться от опасного сближения можно тремя способами:
- увеличением или уменьшением эксцентриситета, что соответственно увеличивает или уменьшает малую ось эллиптической трассы по отношению к НТЭП;
- резким изменением сидерического периода обращения КАСК, что сдвигает трассу от НТЭП по долготе;
- совмещением или последовательным исполнением первых двух способов.
Все перечисленные способы могут быть срочными, когда они проводятся самостоятельно от коррекций наклонения с привлечением двигателей коррекции долготы, либо несрочными, когда они проводятся одновременно с коррекциями наклонения с привлечением двигателей коррекции наклонения.
Такого набора способов коррекций уклонения достаточно для решения возникшей задачи.
8. В отсутствие опасности критического сближения КАСК с СКА возвращают трассу полета КАСК к НТЭП и устанавливают НТЭП в оптимальное положение.
Далее п.п. 5 – 8 повторяются в течение всего срока удержания КАСК.
КАСК в заявленном способе автономной коллокации решает задачу коллокации в полном объеме и в полной мере в рабочей узкой области по долготе Lст ± ΔL (Lст – долгота стояния), в которой могут находиться (каким образом – центру управления КАСК не важно) сколь угодно много КА, являющихся для КАСК СКА. И данный способ является наиболее простым и наименее затратным из всех возможных перечисленных и неупомянутых способов.
Ограничением на применение данного способа является ситуация, когда заявленная ширина ОУ КАСК меньше ширины ОУ СКА и ширина ОУ КАСК не подлежит корректировке в большую сторону. Ситуация маловероятная. Увеличение ОУ, скажем, с ±0,05° до ±0,1° и даже (в нашем случае с наклонением) до ±0,4° никак не повлияет на выполнение КАСК целевой задачи и не потребует доработок конструкции КАСК.
Ограничением на применение данного способа не является ситуация, когда в РРОУ находится уже КА с технологически допустимым наклонением, а то и просто геосинхронный 24-часовой КА.
Ограничением на применение любого другого способа является наличие в узкой области орбитальной позиции, не считая КАСК, трех и более КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| СПОСОБ ПОДГОТОВКИ К КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787603C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
Изобретение относится к управлению движением космических аппаратов (КА) вблизи точек стояния на стационарной орбите. КА с самоколлокацией (КАСК) постоянно удерживают в заданной области удержания (ОУ) по долготе. Внутри этой ОУ находятся смежные КА, для которых определяют, по траекторным измерениям, реальную рабочую ОУ (РОУ). Если РОУ превышает заданную ОУ, то корректируют ОУ для КАСК и представляют её в фазовой плоскости [Δϕ; ΔL] как номинальный трасс-эллипс полета (ТЭП) КАСК с соотношением широтной (Δϕ) и долготной (ΔL) полуосей 4:1. Данный ТЭП покрывает РОУ. Корректируют орбиту КАСК в соответствии с ТЭП. Удержание и автономную коллокацию КАСК проводят совмещенными коррекциями периода, векторов наклонения и эксцентриситета. Определяют стратегии управления дальними КА (вне РОУ). При опасности критического сближения КА проводят коррекции уклонения с последующим возвратом трассы полета КАСК к ТЭП и установкой ТЭП в оптимальное положение. Технический результат состоит в обеспечении автономной коллокации трех и более КА, находящихся в узкой орбитальной области вблизи КАСК. 1 ил.
Способ автономной коллокации на околостационарной орбите, включающий выявление за время приведения космического аппарата (КА) с самоколлокацией (КАСК) в заданную область удержания по широте и долготе относительно точки стояния по данным независимых траекторных измерений стратегий управления движением центров масс смежных КА, измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, уточнение тяги двигателей коррекции и проведение коррекций орбиты КАСК, в том числе коррекций уклонения, отличающийся тем, что при рассмотрении возможности постановки КАСК в заданную область удержания по долготе определяют номинальный трасс-эллипс полета КАСК, представляющий собой уточненную указанную область удержания КАСК в ее номинальном (нейтральном) положении по долготе, для чего половину общей ширины реальной рабочей области удержания по долготе центров масс всех смежных КА, находящихся вблизи точки стояния, задают одной из полуосей указанного трасс-эллипса, в качестве другой полуоси данного трасс-эллипса задают наклонение, равное четырехкратной реальной рабочей области удержания по долготе, определяют стратегии управления центрами масс дальних смежных КА, при их наличии в указанной области удержания, прилегающих с обеих сторон по долготе к заданной области удержания, за время приведения КАСК в заданную область удержания проводят коррекции наклонения и вектора эксцентриситета с тем, чтобы наклонение орбиты КАСК стало равным четырехкратной реальной рабочей области удержания по наклонению, аргумент широты перигея орбиты КАСК стал равным π/2 или 3π/2 и двойной модуль эксцентриситета на момент начала этапа удержания КАСК в заданной области удержания составил величину, эквивалентную долготной полуоси указанного трасс-эллипса, при этом удержание КАСК и автономную коллокацию проводят совмещенными коррекциями периода, векторов наклонения и эксцентриситета последовательными включениями из выбранной диагональной пары двигателей наклонения на обоих, внутри витка оптимальных для компенсации вековых уходов вектора наклонения, активных участках, при этом выбор пары двигателей наклонения и очередность их работы определяют исходя из стратегии эффективной компенсации суточных изменений эксцентриситета, а в случаях возникновения опасности критического сближения КАСК со смежными КА проводят коррекции уклонения, представляющие собой несрочные, совмещенные с коррекциями наклонения или самостоятельные коррекции периода, а также коррекции среднего эксцентриситета орбиты, трансформирующие долготную ось указанного трасс-эллипса, с последующим возвратом трассы полета КАСК к указанному номинальному трасс-эллипсу и установкой этого трасс-эллипса в оптимальное положение в отсутствие опасности критического сближения КАСК со смежными КА.
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| US 2013062471 A1, 14.03.2013 | |||
| EP 0780297 А1, 25.06.1997. | |||

