Изобретение относится к области противодействия выполнению задач беспилотными летательными аппаратами и может быть использовано для комплексного контроля за воздушной обстановкой, обнаружения, пеленгации, распознавания и нейтрализации функционирования аппаратуры беспилотных летательных аппаратов (БПЛА), в том числе малоразмерных и малоскоростных.
Известна система защиты от беспилотных летательных аппаратов (БПЛА) [1 - UAV Defense System, P.D. Whitmarsh, Saha Whitmarsh, WO 2017/106005 A1F 41H 13/00 22.6.2017 г.], содержащая несколько радиоприемных сенсоров, которые обнаруживают и принимают сигналы БПЛА, контрольное устройство, в котором осуществляется идентификация типа БПЛА по хранящейся в базе данных информации о сигналах или по MAC адресам производителя БПЛА и происходит формирование сигнала помехи в соответствии с определенным типом БПЛА, а также радиопередающее устройство, излучающее сигнал помехи в направлении БПЛА.
Недостатками этой системы является невозможность обнаружить и противодействовать БПЛА, осуществляющим полет в режиме радиомолчания, возможность ложной тревоги при использовании производителями MAC адресов в отличающихся от БПЛА устройствах (например, в системах стабилизации фотоаппарата в селфи-палках DH), отсутствие возможности определения угла места БПЛА, что значительно затрудняет идентификацию БПЛА с отсутствующими в базе данных сигналами.
Известна система обнаружения и противодействия БПЛА, фирмы Rafael [2 - Н. Антонов. Борьба с малоразмерными дронами, часть 1, Военное обозрение. https://topwar.ru/141797-borba-s-malorazmemymi-dronami-chast-l.html, 24.05.2018 г.], содержащая полусферический переносной радиолокатор Rada RPS-42 [3 - RPS-42 Radar Systemfor Tactical Air Surveillance, https://www.rada.com/images/brochures/radars/RPS-42.pdf, 28.04.2014 г.],
обеспечивающий обнаружение БПЛА методами активной радиолокации на расстоянии от 150 м (радиус слепой зоны) до 3,5 км при эффективной поверхности рассеяния БПЛА 0,002 м2 с минимальной радиальной скоростью 10 км/ч и точностью определения расстояния 50 м, систему радиоразведки Net Sense Comlnt Netline, обеспечивающую обнаружение сигналов БПЛА [http://www.netlinetech.com/products/detection/netsense.html, 16.12.2013 г.], в диапазоне частот от 20 МГц до 6 ГГц и определение направления на него в азимутальной плоскости в секторе 60° и идентификацию известных типов БПЛА, оптоэлектронный блок Controp MEOS [https://www.controp.com/short-range-scanning-observation/meos-u/, 12.12.2016 г.] с камерами дневного и ночного тепловизионного наблюдения, обеспечивающий идентификацию обнаруженных целей, систему постановки помех NetlineC-Guard [http://www.netlinetech.com/solutions/defense/jamming-force-protection/ied-jamming-neutralization.html, 16.12.2013 г.], обеспечивающую постановку помех, всенаправленную по азимуту, в пяти фиксированных диапазонах частот общего пользования от 433 МГц до 6000 МГц.
Недостатками описанной выше системы обнаружения и противодействия БПЛА являются невозможность идентификации и обнаружения неизвестных типов БПЛА, низкая дальность противодействия БПЛА, высокая минимальная радиальная скорость обнаружения цели, обуславливающая высокую вероятность пропуска обнаружения и срыв сопровождения низкоскоростных БПЛА мини и малого класса, а также БПЛА, совершающих противорадиолокационные маневры с минимизацией радиальной скорости, большой радиус слепой зоны, обуславливающий низкую эффективность применения в городских условиях, в которых возможен скрытный запуск БПЛА на расстоянии от 50 до 150 м, низкая точность определения местоположения БПЛА, приводящая к снижению вероятности противодействия БПЛА, определение средствами пассивной радиолокации направления на БПЛА только в азимутальной плоскости, что затрудняет выявление БПЛА методами пассивной радиолокации среди других источников излучения и не обеспечивает точного наведения средств противодействия на БПЛА, ограничение частотных диапазонов средств радиоподавления, что позволяет осуществлять радиоподавление только коммерческих БПЛА.
Известен радиолокационно-оптический комплекс обеспечения безопасности объектов и нейтрализации БПЛА «ROSC-l», предназначенный для комплексного контроля за воздушной обстановкой, обнаружения, распознавания и нейтрализации малоразмерных и малоскоростных беспилотных летательных аппаратов, созданный АО «НПО «ЛЭМЗ» [3 -Радиолокационно - оптический комплекс обеспечения безопасности объектов и нейтрализации БПЛА «ROSC-l» http://www.lemz.ru /publicdata/ROSC-l%20pyc%20 разворот pdf, 20.02.2018 г.; Каталог «День передовых технологий правоохранительных органов Российской Федерации», с. 93, http://e-edition.ru/katalog/dpt-18/files/assets/basic-html/page95.html 24.05.2018 г.; Военно-технический сборник «Бастион», сетевое издание, свидетельство о регистрации СМИ ЭЛ №ФС 77 - 62556 от 31.07.2015, http://bastion-karpenko.ru/neutralize-the-uav-rosc-l/, 18.06.2018 г.]. Радиолокационно-оптический комплекс обеспечения безопасности объектов и нейтрализации беспилотных летательных аппаратов по существу является многофункциональным комплексом средств
обнаружения и радиопротиводействия применению беспилотных летательных аппаратов и включает ряд основных радиоэлектронных средств: обзорный двухлучевой радиолокатор Х-диапазона с твердотельным усилителем, работающий в азимутальной плоскости вкруговую, в угломестной плоскости в части обнаружения - в секторе углов шириной 30°, в части определения направления на обнаруженный БПЛА по углу места - в зоне пересечения верхнего и нижнего луча шириной 2°, и обеспечивающий обнаружение БПЛА на дальностях от 300 м до 15000 м с темпом обновления информации 2,5 с; встроенный блок аппаратуры зависимого наблюдения АЗН-В для контроля воздушного пространства и сопровождения воздушных судов; оптико-электронную систему, содержащую телевизионную и тепловизионную камеры и обеспечивающую электромеханическое наведение на цель по азимуту - вкруговую, по углу места - в секторе углов от минус 3° до 45°; систему радиотехнического мониторинга, обеспечивающую обнаружение сигналов, излучаемых БПЛА, и их пеленгование в азимутальной плоскости с точностью до 4° в диапазоне частот от 400 до 6000 МГц; систему радиоэлектронного управления; систему радиовоздействия, обеспечивающую воздействие на каналы управления и навигации БПЛА на дальности до 2 км. Все радиоэлектронные средства транспортируются на транспортном средстве в кузове-контейнере, в котором также установлены дизель-генератор, стойки электропитания и связи и опорно-поворотное устройство с размещенным на нем радиолокатором Х-диапазона. Оптико-электронная система и система радиотехнического мониторинга могут быть вынесены для удаленной работы. Оборудование комплекса размещается на одном грузовом шасси типа КАМАЗ, включая основные и вспомогательные системы. Возможно размещение оборудования комплекса на стационарных объектах.
К недостаткам радиолокационно-оптического комплекса обеспечения безопасности объектов и нейтрализации беспилотных летательных аппаратов следует отнести:
- низкую эффективность и дальность радиоподавления и невозможность сопряжения без дополнительного поиска с средствами высокоточного поражения БПЛА, обусловленные невозможностью точного наведения на цель максимума излучения средств радиоподавления и поражающих устройств средств высокоточного поражения БПЛА в связи с отсутствием определения направления на БПЛА по углу места как системой радиотехнического мониторинга, так и радиолокатором во всем секторе работы радиолокатора;
- невозможность обнаружения неизвестных типов БПЛА и идентификации обнаруженных системой радиотехнического мониторинга сигналов как сигналов БПЛА в городских условиях, над трассами с интенсивным движением и в других районах с наличием в диапазоне частот излучения БПЛА ложных неподвижных и движущихся целей, обусловленную отсутствием возможности селекции обнаруженных целей по углу места (высоте);
- отсутствие возможности выявления БПЛА, осуществляющих полет в режиме радиомолчания, на фоне естественных ложных целей (птиц), обусловленное невозможностью выявления основных классифицирующих признаков - малых изменений траектории и скорости полета, микродоплеровского смещения частоты отраженного от цели радиолокационного сигнала, вызванного движением крыльев птиц, пропеллеров БПЛА и т.п., в связи с большим периодом обновления, малым временем непрерывного контакта радиоизлучения радиолокатора с целью и отсутствием информации о высоте полета цели;
- невозможность определения местоположения наземных пунктов управления БПЛА, в связи с невозможностью определения местоположения системой радиотехнического мониторинга;
- невозможность самозащиты комплекса от отличных от БПЛА угроз. Наиболее близким аналогом заявляемому изобретению по
технической сущности и достигаемому результату (прототипом) является комплекс противодействия коммерческим беспилотным воздушным средствам (БВС) [4 - Deterrent For UnmannedAerial Systems, D.A. Parker, D.E. Stern, L.S. Pierce, US Patent9715009 B1, GO IS 7/38, F41H 11/02, GO IS 13/66, G01S 13/86 25.06.2017 г.], содержащий пеленгатор радиосигналов, включающий приемную всенаправленную и приемные направленные антенны и обеспечивающий обнаружение радиосигналов и определение направления на источник радиоизлучения в азимутальной плоскости, анализатор спектра, обеспечивающий анализ обнаруженных радиосигналов и идентификацию БПЛА по характерным особенностям спектра их сигналов, хранящимся в базе данных комплекса, доработанный радиолокатор наземных (поверхностных) целей X диапазона частот Vista SSRSSF100 с электромеханическим обзором сектора работы, обеспечивающий обнаружение, определение дальности, азимута, угла места цели и классификацию типа цели на основе определения уровня отраженного сигнала, доплеровского смещения частоты сигнала (радиальной скорости цели), поляризации, лазерный дальномер, обеспечивающий определение дальности до БПЛА, электронно-оптическую систему, содержащую телевизионную и тепловизионную камеры, объединенные с помощью программного сопряжения с лазерным дальномером, определяющим уточненное направление на БПЛА, процессор обработки данных,
принимающий решение об обнаружении БПЛА на основе анализа комплексного портрета от радиолокатора,
пеленгатора, анализатора спектра, электронно-оптической системы с участием или без участия оператора, систему радиоподавления, содержащую генератор сигналов, формирующий адаптированный для обнаруженного БПЛА сигнал на основе особенностей спектра БПЛА, усилитель сформированного сигнала, набор направленных антенн, излучение которых ориентируется в направлении на обнаруженный БПЛА. При этом радиолокатор осуществляет обнаружение БПЛА, осуществляющих полет в режимах радиомолчания и/или радиосвязи, определение их местоположения, трассовое сопровождение и выделение БПЛА на фоне ложных целей, пеленгатор радиосигналов обнаруживает и пеленгует радиосигналы, излучаемые БПЛА, наземными пунктами управления БПЛА или другими источниками радиоизлучения,
классифицирует обнаруженные сигналы и выделяет принадлежащие к БПЛА и/или определенным типам БПЛА на основе анализа структуры сигналов или переносимой ими информации и сравнения выявленных особенностей сигналов или переносимой ими информации с базой данных сигналов, оптико-электронная система наводится на обнаруженную цель по целеуказаниям систем активной и/или пассивной радиолокации, обнаруживает БПЛА в автоматическом режиме по характерным признакам изображения БПЛА, хранящимся в базе данных образов или в ручном режиме с участием оператора, передает изображение цели на экран рабочего места оператора и отображает телевизионное и/или тепловизионное изображение на нем, обеспечивает уточненное определение направления на цель, по результатам работы радиолокатора, радиопеленгатора и оптико-электронной системы процессор осуществляет классификацию цели, пополнение базы данных характерных признаков БПЛА разных типов по указанию оператора, система радиоподавления осуществляет формирование сигнала помехи, наведение максимума диаграммы направленности антенны радиоподавления на цель, усиление сигнала помехи и его излучение в направлении цели.
Принятый в качестве прототипа комплекс обеспечивает обнаружение известных (характеристики излучения которых записаны в базе данных комплекса) типов коммерческих БПЛА на расстоянии до 2 км по результатам совместного анализа работы пеленгатора, радиолокатора и электронно-оптической системы. При этом основными классифицирующими признаками, определяющими выявление БПЛА, являются обнаружение сигналов излучения БПЛА, спектральные или информационные (MAC адреса) характеристики которых соответствуют имеющимся в базе данных комплекса, результаты телевизионного или тепловизионного наблюдения БПЛА и переносимого им груза и их визуальная идентификация как угрозы. Остальные классифицирующие признаки (уровень отраженного радиолокационного сигнала, скорость полета, особенности траектории, размер цели) являются вспомогательными. Используемые в комплексе противодействия БПЛА технические решения и методы обнаружения БПЛА и достижимые на основе их использования технические характеристики соответствуют характеристикам малых коммерческих БПЛА: дальность полета до 2 км, полет только в режиме радиосвязи, известные для каждого типа БПЛА особенности излучаемых ими радиосигналов.
Основными недостатками комплекса являются:
- невозможность обнаружения БПЛА, осуществляющих полет в режиме радиосвязи, с неизвестными, отсутствующими в базе данных комплекса, характеристиками сигналов, без участия оператора, что обусловлено тем, что выделение БПЛА и/или их идентификация в комплексе в автоматическом режиме производится только путем сравнения характеристик обнаруженных сигналов с имеющейся информацией в базе данных характеристик БПЛА комплекса;
- невозможность в автоматическом режиме обнаружения и идентификации неизвестных БПЛА, осуществляющих полет в режиме радиомолчания, вне зоны визуального контроля без участия оператора, обусловленная тем, что выделение БПЛА и/или их идентификация в комплексе производится только путем сравнения характеристик отраженных радиолокационных сигналов с радиолокационными портретами БПЛА, имеющимися в базе данных комплекса;
- ограничения по дальности работы комплекса, обусловленные тем, что сигнал тревоги формируется при обнаружении и выделении БПЛА несколькими системами одновременно, то есть дальность работы комплекса определяется минимальной дальностью работы систем комплекса;
- невозможность определения местоположения наземного пункта управления БПЛА, осуществляющего полет в режиме радиосвязи, за пределами зоны визуального наблюдения без участия оператора,
обусловленная тем, что пеленгатор осуществляет только определение направления в азимутальной плоскости;
неэффективное использование средств радиоподавления, не обеспечивающего защиту комплекса от воздушных и наземных угроз при перемещении комплекса.
Зона визуального контроля, обеспечиваемая средствами электронно-оптического наблюдения, существенно зависит от погодных условий (дождь, снег, туман, облачность значительно снижают дальность или делают невозможным обнаружение целей), дальность работы электронно-оптических средств, как правило, существенно меньше дальности других систем обнаружения БПЛА. Для обеспечения визуального контроля необходимо участие оператора. Поэтому для эффективного, не зависящего от погоды, применения комплекса важно обеспечить возможность обнаружения БПЛА вне зоны визуального контроля.
Техническими проблемами, на решение которых направлено изобретение, являются:
обеспечение обнаружения БПЛА, осуществляющих полет в режиме радиосвязи, с неизвестными, отсутствующими в базе данных комплекса, характеристиками сигналов с участием или без участия оператора;
- обеспечение возможности определения местоположения наземного пункта управления БПЛА, осуществляющего полет в режиме радиосвязи, с участием или без участия оператора;
- обеспечение обнаружения неизвестных БПЛА, осуществляющих полет в режиме радиомолчания, с участием или без участия оператора;
- увеличение дальности работы комплекса;
- расширение функциональных возможностей комплекса в части обеспечения защиты объектов и самозащиты от различных видов угроз и в различных условиях эксплуатации.
Для решения указанных технических проблем предлагается многофункциональный комплекс средств обнаружения, сопровождения и радиопротаводействия применению беспилотных летательных аппаратов малого класса, включающий в свой состав систему пассивной радиолокации, систему активной радиолокации, электронно-оптическую систему, содержащую телевизионную и тепловизионную камеры с поворотным устройством, устройство обработки и хранения информации, систему радиоподавления, включающую устройство формирования помех, комплект усилителей и комплекты передающих ненаправленных и направленных антенн, ориентируемых в направлении цели по азимуту и углу места с помощью электромеханического поворотного устройства, рабочее место оператора, модуль навигации и ориентации, систему электропитания, систему связи, транспортное средство.
Согласно изобретению, введены в составе системы пассивной радиолокации N, не менее двух, выносных постов, аппаратура навигации и привязки ко времени на каждом из выносных постов, устройство передачи данных с выносных постов и сервер вторичной обработки с модулем обработки картографической информации, в составе системы активной радиолокации модуль хранения образов радиолокационных сигналов и сервер управления и обработки с модулем классификации и модулем обработки картографической информации, в составе системы радиоподавления подсистема обнаружения, радиопередающая подсистема и устройство обработки, каждый из N выносных постов с помощью устройства передачи данных связан с сервером вторичной обработки системы пассивной радиолокации, который связан линиями передачи данных с устройством обработки и хранения информации, модуль обработки картографической информации линиями передачи данных связан с сервером вторичной обработки, сервер управления и обработки системы активной радиолокации связан линиями передачи данных с модулем хранения образов радиолокационных сигналов, модулем обработки картографической информации, модулем классификации, а также с антенной системой активной радиолокации и с устройством обработки и хранения информации, устройство обработки в составе системы радиоподавления связано линиями передачи данных с подсистемой обнаружения, радиопередающей подсистемой, устройством формирования помех, поворотным устройством системы радиоподавления и устройством хранения и обработки информации, формирование сигнала тревоги об обнаружении БПЛА осуществляется на основе критериев, адаптированных к дальности работы каждой из систем комплекса и к типам обнаруживаемых БПЛА.
Система активной радиолокации выполнена в виде импульсно-доплеровского трехкоординатного радиолокатора, соединенного с антенной, модуля хранения образов радиолокационных сигналов и сервера управления и обработки с модулем классификации и модулем обработки картографической информации, к серверу управления и обработки подключен управляющий вход поворотного устройства, на котором размещена антенна, в качестве антенны использована твердотельная цифровая активная фазированная антенная решетка, обеспечивающая возможность одновременной работы в режимах излучения и приема по нескольким пространственным направлениям с разными характеристиками сигналов, твердотельная цифровая активная фазированная антенная решетка соединена линиями передачи данных с сервером управления и обработки и модулем хранения образов радиолокационных сигналов, сервер управления и обработки соединен линиями передачи данных с модулем хранения образов радиолокационных сигналов и с помощью устройства обработки и хранения информации с рабочим местом оператора, при этом импульсно-доплеровский трехкоординатный радиолокатор определяет дальность, азимут, угол места цели и скорость цели, а также относительные скорости перемещения отдельных частей цели, на основе чего осуществляется разделение БПЛА и целей естественного происхождения (птиц, насекомых, воздушных образований и т.п.), производит выделение БПЛА на фоне ложных целей путем анализа особенностей отраженных радиолокационных сигналов, и/или на основе трассово-картографического анализа, состоящего в анализе прохождения трассы над особенностями местности, анализа относительных скоростей перемещения частей цели.
В сервере вторичной обработки подсистемы пассивной радиолокации, связанном линиями передачи данных с устройством обработки и хранения информации, а также с модулем обработки картографической информации, классификация цели как беспилотного летательного аппарата происходит на основе критерия об идентификации беспилотного летательного аппарата, на выносных постах по временным, спектральным или информационным характеристикам принятых сигналов, и/или на основе критерия нахождения обнаруженного источника радиоизлучения над землей (критерий превышения цели заданной высоты), и/или в результате трассово-картографического анализа, на основе критерия прохождения трассы цели вдали от дорог, над сложно проходимыми особенностями местности, классификация цели как наземного пункта управления происходит на основе информации об идентификации наземного пункта управления, переданной с выносных постов по временным, спектральным или информационным характеристикам принятых сигналов.
Радиопередающая подсистема системы радиоподавления включает комплект передающих направленных и комплект передающих ненаправленных антенн, каждый из которых может быть подключен через двухканальный переключатель к комплекту усилителей, соединенному
с устройством формирования помех, подсистема обнаружения состоит из последовательно соединенных приемной ненаправленной антенны и радиоприемного устройства, подключенных к устройству обработки, радиопередающая подсистема обеспечивает возможность работы в следующих режимах: режим радиоподавления каналов управления и навигации БПЛА по внешнему целеуказанию, режим автономного радиоподавления каналов управления и навигации БПЛА и режим радиоподавления линий управления радиовзрывателями, в режиме радиоподавления по внешним целеуказаниям устройство формирования помех формирует сигналы помехи каналам управления БПЛА, адаптированные для каждого из известных типов БПЛА, сигналы шумовой помехи для неизвестных типов БПЛА в соответствии с заданием, получаемым от сервера управления и обработки системы активной радиолокации, и сигналы помехи радионавигационным системам, сигналы помехи через комплект усилителей излучаются в направлении подавляемого источника радиоизлучения, в режиме автономного радиоподавления подсистема обнаружения сигнала осуществляет всенаправленное обнаружение радиосигнала БПЛА по базе данных сигналов БПЛА, устройство формирования помехи формирует сигналы помехи каналам управления и навигации БПЛА, адаптированные для каждого из известных типов БПЛА, сигналы помехи усиливаются и излучаются через всенаправленные антенны, в режиме радиоподавления линий управления радиовзрывателями подсистема обнаружения сигнала осуществляет всенаправленное обнаружение радиосигнала линии управления радиовзрывателями, устройство формирования помехи формирует сигнал помехи, адаптированный к типу канала управления радиовзрывателями, сигналы помехи усиливаются и излучаются через всенаправленные антенны, в режиме автономного радиоподавления каналов управления и навигации БПЛА и режиме радиоподавления линий управления радиовзрывателями система радиоподавления может работать как на стоянке, так и на ходу, обеспечивая самозащиту комплекса.
Заявляемый многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса обладает совокупностью существенных признаков, не известных из уровня техники для объектов подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемый многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», так как для специалистов он явным образом не следует из уровня техники, то есть не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Техническим результатом является создание многофункционального комплекса средств обнаружения и радиопротиводействия применению беспилотных летательных аппаратов с повышенными дальностью и достоверностью обнаружения, определяемой возможностью обнаружения и выявления беспилотных летательных аппаратов, осуществляющих полет как в режиме радиомолчания, так и в режиме радиосвязи с отсутствующими в базе данных комплекса характеристиками сигналов, выявления на фоне других целей естественного или искусственного происхождения, определения местоположения их наземных пунктов управления, увеличенной информативностью данных об обнаруженных беспилотных летательных аппаратах, повышенной возможностью радиопротиводействия их применению и увеличенной функциональностью работы комплекса.
Обоснование достигнутого технического результата приведено ниже.
1 Обнаружение БПЛА, осуществляющих полет в режиме радиосвязи, с неизвестными, отсутствующими в базе данных комплекса, характеристиками сигналов. Этот результат достигается тем, что
в составе системы пассивной радиолокации используется N, N не менее двух, выносных постов пассивной радиолокации, двухкоординатный пеленгатор-обнаружитель из состава выносного поста пассивной радиолокации выполнен таким образом, что позволяет определять пеленг
по азимуту и углу места цели, а в качестве критерия обнаружения БПЛА, осуществляющего полет в режиме радиомолчания, используются критерии определения характеристик обнаруженного сигнала, выявления ненулевой высоты цели, и анализа особенностей его траектории. Двухкоординатный пеленгатор-обнаружитель осуществляет обнаружение цели и определение пеленга на нее по азимуту и углу места. В локальном сервере выносного поста пассивной радиолокации происходит временной, спектральный и информационный анализ сигнала путем его сравнения с информацией о сигналах различных типов БПЛА и других воздушных средств. В случае, если в результате анализа устанавливается, что сигнал принадлежит одному из известных типов БПЛА, то принимается решение об обнаружении БПЛА. В случае, если сигнал не принадлежит ни одному из известных типов БПЛА и не принадлежит ни одному из известных типов других воздушных средств, то анализируются значения пеленга на цель. Если пеленг на цель по углу места превышает ошибку определения пеленга по углу места, то принимается решение об обнаружении БПЛА. То есть используется критерий, что неизвестный сигнал - это БПЛА. Если пеленг на цель по углу места меньше ошибки определения пеленга по углу места, то информация об обнаруженной цели передается через систему передачи данных на сервер вторичной обработки системы пассивной радиолокации с установленным модулем анализа картографической информации. Такая же информация поступает на сервер вторичной обработки от нескольких выносных постов пассивной радиолокации, в которых произошло обнаружение сигнала цели. По переданным в нескольких циклах измерения характеристикам сигналов и пеленгам цели в сервере вторичной обработки определяется траектория движения цели. Модуль анализа картографической информации проводит трассово-картографический анализ, сравнивая траекторию движения цели с информацией о дорогах и других возможных путях перемещения наземных целей, с информацией о препятствиях для перемещения наземных целей (лесополосы, овраги, реки и т.п.). В случае, если траектория движения цели не совпадает с возможными путями и/или пересекает препятствия, а также сигнал не принадлежит ни одной из известных воздушных целей другого типа, то принимается решение об обнаружении БПЛА. В результате этого осуществляется обнаружение не только известных, но и неизвестных, с отсутствующими в базе данных комплекса характеристиками сигналов, типов БПЛА.
2 Определение местоположения наземного пункта управления БПЛА, осуществляющего полет в режиме радиосвязи. Этот результат достигается тем, что в составе системы пассивной радиолокации используется N, N не менее двух, выносных постов пассивной радиолокации. Обнаружение сигнала, излучаемого наземным пунктом управления БПЛА, осуществляется несколькими, не менее двух, выносными постами пассивной радиолокации. Двухкоординатный пеленгатор-обнаружитель в каждом из выносных постов пассивной радиолокации, в котором произошло обнаружение сигнала наземного пункта управления, осуществляет определение пеленга на нее по азимуту и углу места. В локальном сервере выносного поста пассивной радиолокации происходит временной, спектральный и информационный анализ сигнала путем его сравнения с информацией о сигналах различных типов наземных пунктов управления, БПЛА и других воздушных средств. В случае, если в результате анализа устанавливается, что сигнал принадлежит одному из известных типов наземных пунктов управления и пеленг по углу места на цель меньше ошибки определения пеленга по углу места, то принимается решение об обнаружении наземного пункта управления. Информация об обнаруженной цели передается через систему передачи данных на сервер вторичной обработки системы пассивной радиолокации. Такая же информация поступает на сервер вторичной обработки от нескольких выносных постов пассивной радиолокации, в которых произошло обнаружение сигнала цели. По переданным характеристикам сигналов и пеленгам цели в сервере вторичной обработки определяется местоположение наземного пункта управления методом триангуляции.
3 Обнаружение неизвестных БПЛА, осуществляющих полет в режиме радиомолчания. Этот результат достигается тем, что твердотельная цифровая активная фазированная антенная решетка из состава системы активной радиолокации выполнена таким образом, что обеспечивает возможность одновременной работы по нескольким направлениям с разными характеристиками сигналов, а в сервере управления и обработки системы пассивной радиолокации реализованы модуль классификации и модуль картографической обработки. Система активной радиолокации осуществляет обнаружение и определение местоположения (дальность, азимут, угол места) цели обзорным лучом, работающим в импульсно-доплеровском режиме. Для обеспечения высокой скорости обновления информации, необходимой для построения траектории движения БПЛА, обзорный луч осуществляет постоянную перестройку направления работы от импульса к импульсу. Информация о характеристиках отраженного от цели сигнала и местоположении цели передается в сервер управления и обработки. В сервере управления и обработки осуществляется построение траектории движения цели и анализ характеристики отраженных радиолокационных сигналов и сравнение их с базой данных отраженных сигналов для различных типов целей. Если устанавливается, что отраженный сигнал принадлежит одному из известных типов БПЛА и высота цели превышает ошибку определения направления на цель по углу места, то принимается решение, что обнаружен БПЛА одного из известных типов. Если отраженный радиолокационный сигнал не совпадает ни с одним из известных типов БПЛА, то в модуле картографической информации сервера управления и обработки производится анализ траектории цели, построенной по нескольким переданным в сервер управления и обработки отсчетам. Модуль анализа картографической информации проводит трассово-картографический анализ, сравнивая траекторию движения цели с информацией о дорогах и других возможных путях перемещения наземных целей, с информацией о препятствиях для перемещения наземных целей (лесополосы, овраги, реки и т.п.). В случае, если траектория движения цели не совпадает с возможными путями и/или пересекает препятствия, или если высота цели превышает ошибку определения высоты системой активной радиолокации, то принимается решение об обнаружении воздушной цели. После идентификации цели как воздушной сервер управления и обработки выдает команду на формирование и обработку луча классификации. Импульсы луча классификации излучаются одновременно с импульсами обзорного луча. Импульсы луча классификации излучаются постоянно в направлении классифицируемой цели. Импульсы обзорного луча, как было сказано выше, постоянно изменяют направление излучения. Таким образом скважность работы луча классификации по цели существенно уменьшается относительно скважности обзорного луча. Мощность излучения сигнала в луче классификации меньше мощности излучения в обзорном луче пропорционально уменьшению скважности. В результате этого в луче классификации формируется сигнал с высокой частотой повторения импульсов, который путем анализа доплеровского сдвига частоты высокой точности позволяет выявить относительные движения частей цели относительно друг друга (микродоплер), за счет чего можно выявить БПЛА на фоне целей естественного происхождения (птиц, насекомых, воздушных образований и т.п.). Микродоплеровский анализ, а также анализ признаков воздушных целей, отличных от БПЛА, производится в модуле классификации. В результате осуществляется обнаружение и выявление неизвестных типов БПЛА на фоне других целей естественного или искусственного происхождения.
4 Увеличение дальности обнаружения БПЛА. Этот результат достигается тем, что система пассивной радиолокации и система активной радиолокации выполнены таким образом, что обеспечивают возможность обнаружения и выделения как известных, так и неизвестных БПЛА на фоне других целей независимо от других систем, изменением критерия для принятия решения об обнаружении БПЛА по результатам совместной работы систем комплекса. В результате работы систем пассивной или активной радиолокации происходит обнаружение известного или неизвестного типов БПЛА, основными критериями которого, как описано выше, является принадлежность обнаруженной цели к воздушным целям и ее несовпадение с другими известными и не являющимися БПЛА типами воздушных целей. Такой признак является достаточным для принятия решения об обнаружении БПЛА. БПЛА может также обнаруживаться по результатам работы электронно-оптической системы на основе анализа полученных изображений цели автоматически или оператором. Это также является достаточным для обнаружения БПЛА. Для описываемого комплекса достаточно обнаружение БПЛА лишь одной из его систем. В качестве критерия принятия решения об обнаружении БПЛА принимается решение задачи его обнаружения одной из систем комплекса. Таким образом дальность работы комплекса определяется наибольшей дальностью работы всех систем обнаружения БПЛА. То есть дальность работы, по сравнению с прототипом, увеличивается.
5 Расширение функциональных возможностей многофункционального комплекса. Этот результат достигается тем, что в состав системы радиоподавления введены устройство обработки и подсистема обнаружения, а в состав радиопередающей системы -комплект всенаправленных антенн. При этом система радиоподавления может работать как совместно, так и независимо от других систем и модулей комплекса как на стоянке, так и в движении. Система обнаружения обеспечивает всенаправленный прием сигналов, а устройство обработки - анализ временных и спектральных характеристик принятого сигнала. Анализ сигнала производится в части определения соответствия информации о принятом сигнале имеющейся в базе данных информации о возможных угрозах: известных типах БПЛА, радиолиниях управления взрывными устройствами и т.п.При идентификации сигнала, как представляющего угрозу, устройство обработки формирует сигнал помехи в соответствии с моделями сигналов помехи, соответствующий типу обнаруженной угрозы, сигнал усиливается и излучается через комплект всенаправленных антенн. Таким образом обеспечивается самозащита многофункционального комплекса как на стоянке, так и в движении. Также обеспечивается защита колонны, в которой происходит передвижение комплекса, от радиоуправляемых взрывных устройств. Таким образом обеспечивается расширение функциональных возможностей описываемого комплекса относительно прототипа.
Проведенный сравнительный анализ признаков заявляемого многофункционального комплекса средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса и комплекса-прототипа показывает, что заявляемом комплексе изменена совокупность существенных признаков:
- введены N, не менее двух, выносных постов системы пассивной радиолокации;
- введена аппаратура навигации и привязки ко времени на каждом из выносных постов пассивной радиолокации;
- введено устройство передачи данных с выносных постов системы пассивной радиолокации;
- введен сервер вторичной обработки системы пассивной радиолокации с модулем обработки картографической информации;
- введен модуль хранения образов радиолокационных сигналов системы активной радиолокации;
- введен сервер управления и обработки с модулем классификации и модулем обработки картографической информации системы активной радиолокации;
- введена подсистема обнаружения системы радиоподавления;
- введено устройство обработки в составе системы радиоподавления;
- изменено выполнение пеленгатора системы пассивной радиолокации: каждый их выносных постов выполнен в виде двухкоординатного обнаружителя-пеленгатора, обеспечивающего определение азимута и угла места на обнаруженный источник радиоизлучения и работающего в непрерывном рабочем диапазоне частот от минимальной до максимальной возможных для использования в БПЛА или наземных постах управления частот, двухкоординатный обнаружитель-пеленгатор совместно с аппаратурой навигации и привязки ко времени позволяет обнаруживать сигналы БПЛА и наземных пунктов управления, осуществлять привязку обнаруженного сигнала ко времени, идентифицировать принадлежность к определенному типу БПЛА, или к наземному пункту управления или к воздушному средству иного типа на основе сравнения особенностей принятого сигнала или передаваемой сигналом идентификационной информации с данными, хранящимися в базе данных сигналов БПЛА, передавать через систему передачи данных информацию о характеристиках обнаруженного сигнала: время обнаружения и пеленгования, частота, пеленг по азимуту и углу места, тип идентифицированного БПЛА, наземного пункта управления или признак отсутствия идентификации (возможна передача дополнительной информации);
- изменено выполнение системы пассивной радиолокации, которая выполнена распределенной в виде N, не менее двух, выносных постов, системы передачи данных и сервера вторичной обработки, сервер вторичной обработки в результате анализа переданной с вынесенных постов пассивной радиолокации информации определяет принадлежность обнаруженного сигнала к одному источнику радиоизлучения, рассчитывает координаты обнаруженного устройства (широта, долгота, высота), классифицирует цель как БПЛА на основе информации об идентификации БПЛА, переданной с выносных постов, и/или на основе критерия нахождения обнаруженного источника радиоизлучения над землей (критерий превышения цели заданной высоты), и/или на основе трассово-картографического анализа, то есть анализа информации о трассе полета в сопоставлении с картографической информацией (движение через препятствия, вдоль дорог и т.п.), классифицирует цель как наземный пункт управления на основе информации об идентификации наземного пункта управления, переданной с выносных постов;
- изменено выполнение системы активной радиолокации: радиолокатор выполнен в виде импульсно-доплеровского многолучевого трехкоординатного радиолокатора S диапазона частот, в качестве антенны использована активная твердотельная цифровая антенная решетка, обеспечивающая возможность одновременной работы в режимах излучения и приема по нескольким пространственным направлениям с разными характеристиками сигналов, а в сервере управления и обработки системы пассивной радиолокации реализованы модули классификации и картографической обработки. Система активной радиолокации осуществляет обнаружение и определение местоположения (дальность, азимут, угол места) цели обзорным лучом, работающим в импульсно-доплеровском режиме. Для обеспечения высокой скорости обновления информации, необходимой для построения траектории движения БПЛА, обзорный луч осуществляет постоянную перестройку направления работы от импульса к импульсу. Информация о характеристиках отраженного от цели сигнала и о местоположении цели передается в сервер управления и обработки. В сервере управления и обработки осуществляется построение траектории движения цели и анализ характеристики отраженных радиолокационных сигналов и сравнение их с базой данных отраженных сигналов для различных типов целей. Если устанавливается, что отраженный сигнал принадлежит одному из известных типов БПЛА и высота цели превышает ошибку определения направления на цель по углу места, то принимается решение, что обнаружен БПЛА одного из известных типов. Если отраженный радиолокационный сигнал не совпадает ни с одним из известных типов БПЛА, то в модуле картографической информации сервера управления и обработки производится анализ траектории цели, построенной по нескольким переданным в сервер управления и обработки отсчетам. Модуль анализа картографической информации проводит трассово-картографический анализ, сравнивая траекторию движения цели с информацией о дорогах и других возможных путях перемещения наземных целей, с информацией о препятствиях для перемещения наземных целей (лесополосы, овраги, реки и т.п.). В случае, если траектория движения цели не совпадает с возможными путями и/или пересекает препятствия, или если высота цели превышает ошибку определения высоты системой активной радиолокации, то принимается решение об обнаружении воздушной цели. После идентификации цели как воздушной сервер управления и обработки выдает команду на формирование и обработку луча классификации. Импульсы луча классификации излучаются одновременно с импульсами обзорного луча. Импульсы луча классификации излучаются постоянно в направлении классифицируемой цели. Импульсы обзорного луча, как было сказано выше, постоянно изменяют направление излучения. Таким образом скважность работы луча классификации по цели существенно уменьшается относительно скважности обзорного луча. Мощность излучения сигнала в луче классификации меньше мощности излучения в обзорном луче пропорционально уменьшению скважности. В результате этого в луче классификации формируется сигнал с высокой частотой повторения импульсов, который путем анализа доплеровского сдвига частоты высокой точности позволяет выявить относительные движения частей цели относительно друг друга (микродоплер), за счет чего можно выявить БПЛА на фоне целей естественного происхождения (птиц, насекомых, воздушных образований и т.п.). Микродоплеровский анализ, а также анализ признаков воздушных целей, отличных от БПЛА, производится в модуле классификации. В результате осуществляется обнаружение и выявление неизвестных типов БПЛА на фоне других целей естественного или искусственного происхождения;
- изменено выполнение системы радиоподавления, которая содержит радиопередающую подсистему, радиоприемную подсистему обнаружения, комплекты направленных и всенаправленных антенн и устройство обработки, она обеспечивает возможность работы в следующих режимах: режим радиоподавления каналов управления и навигации БПЛА по внешнему целеуказанию, режим автономного радиоподавления каналов управления и навигации БПЛА, режим автономного радиоподавления линий управления радиовзрывателями, и может работать как на стоянке, так и в движении, обеспечивая самозащиту комплекса, в режиме радиоподавления по внешнему целеуказанию обеспечивается излучение направленными антеннами сигнала помехи в направлении БПЛА, в автономных режимах работы излучение происходит через всенаправленные антенны;
- изменено выполнение устройства формирования помехи, которое обеспечивает формирование следующих видов помех: сигналы помехи каналам управления и навигации известных БПЛА, адаптированные для каждого из известных типов БПЛА, сигналы шумовой помехи для каналов управления и навигации неизвестных типов БПЛА в обнаруженном и наиболее распространенных диапазонах частот, сигналы помехи линиям управления радиовзрывателям, адаптированный к типу канала управления радиовзрывателями;
- изменен режим функционирования устройства обработки и хранения информации: сигнал тревоги выбирается на основе критериев, адаптированных к дальности работы каждой системы и с учетом результатов работы каждой из систем комплекса. Каждая из систем комплекса обеспечивает обнаружение БПЛА с высокой достоверностью и дает оценку достоверности принятого решения об обнаружении. Решение об обнаружении БПЛА осуществляется при высоком уровне оценки достоверности принятого решения об обнаружении - по результатам работы одной из систем, при недостаточном уровне достоверности принятого решения об обнаружении - по результатам работы нескольких систем комплекса и их комплексной оценке;
- изменены и введены новые связи: каждый из N выносных постов с помощью системы передачи данных связан с сервером вторичной обработки пассивной радиолокации, который линиями передачи данных связан с устройством обработки и хранения информации и модулем картографической обработки, сервер управления и обработки радиолокатора линиями передачи данных связан с модулем классификации, модулем картографической обработки, модулем хранения образов радиолокационных сигналов, с антенной системы активной радиолокации и с устройством обработки и хранения информации, устройство обработки в составе системы радиоподавления связано линиями передачи данных с устройством формирования помех, радиоприемным устройством системы радиоподавления, комплектом усилителей и поворотным устройством комплекта направленных антенн системы радиоподавления и с устройством хранения и обработки информации.
Сущность предлагаемого многофункционального комплекса средств обнаружения, сопровождения и радиопротиводействия применению БПЛА малого класса поясняется фигурами.
На фигуре 1 приведена структурная схема многофункционального комплекса средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса.
На фигуре 2 приведена структурная схема выносного поста системы пассивной радиолокации.
На фигуре 3 приведена схема, поясняющая размещение выносных постов пассивной радиолокации.
Заявляемый многофункциональный комплекс, кроме перечисленных выше систем и устройств, включает в свой состав транспортное средство, системы электропитания, связи, навигации и ориентации.
Учитывая, что транспортное средство, системы электропитания, связи, навигации и ориентации, также входят в состав комплекса-прототипа, указанные признаки, не имеющие существенных отличий, для упрощения на фигуре 1 не показаны.
В состав многофункционального комплекса средств обнаружения, сопровождения и радиопротиводействия применению БПЛА малого класса (далее - МФК) входят (фигура 1): система активной радиолокации (САР) 1, система пассивной радиолокации (СПР) 6, электронно-оптическая система (ЭОС) 10, система радиоподавления (CP) 14, устройство обработки и хранения информации (УОХИ) 26, рабочее место оператора (РМО) 27. Кроме перечисленных выше средств в состав МФК входят не показанные на фигуре 1 система электропитания, система связи, модуль навигации и ориентации (MHO), транспортное средство.
САР 1, СПР 6, ЭОС 10, CP 14, РМО 27, MHO линиями передачи данных соединены с УОХИ 26. Все системы и устройства МФК связаны с системой электропитания. Все системы и устройства МФК располагаются на транспортной базе.
В состав САР 1 входят цифровая активная фазированная антенная решетка (ЦАФАР) 2, поворотное устройство (ПУ) 3, модуль хранения образцов радиолокационных сигналов (МХОРС) 4, сервер управления и обработки (СУО) 5 с модулем классификации (МК) 5.1 и модулем обработки картографической информации (МОКИ) 5.2. ЦАФАР 2 установлена на ПУ 3 и связана линиями передачи данных с МХОРС 4 и СУО 5. Линией передачи данных СУО 5 связан с УОХИ 26, МК 5.1 и МОКИ 5.2.
В состав СПР 6 входят N, не менее двух, выносных постов пассивной радиолокации (ВППР) 7 (7.1…7.N), устройство передачи данных (УПД) 8, сервер вторичной обработки (СВО) 9 с модулем обработки картографической информации (МОКИ) 9.1. ВППР 7 через УПД 8 связаны с СВО 9, который линией передачи данных связан с УОХИ 26 и МОКИ 9.1. УПД 8 содержит в своем составе оконечные терминалы, между которыми осуществляется передача данных. По одному оконечному терминалу УПД 8 установлено на каждом ВППР 7 и в месте размещения сервера вторичной обработки 9. Оконечные терминалы УПД 8 связаны линиями передачи с аппаратурой ВППР 7 и с сервером вторичной обработки 9. В состав каждого ВППР 7, фигура 2, входят аппаратура навигации и привязки ко времени (АНПВ) 35, двухкоординатный (азимут, угол места) пеленгатор-обнаружитель (ДПО) 28, устройство электропитания (УЭП) 37. Все составные части ВППР 7 связаны с устройством электропитания 37. Эти связи не приведены, чтобы не загромождать схему. В состав ДПО 28 входят комплект всенаправленных антенн (КВНА) 29, комплект антенных решеток полусферического обзора (КАРПО) 30, комплекты радиоприемных трактов (КРТП) 31, 32, двухканальное радиоприемное устройство (ДРПУ) 33, выполненное по схеме с общим гетеродином, двухканальное устройство цифровой обработки (ДУЦО) 34, каналы которого работают от одного тактового генератора, локальный сервер (ЛС) 36. Выходы ЛС 36 являются выходами ДПО 28. КВНА 29 и КАРПО 30 через КРТП 31,32 связаны с входами ДРПУ 33: КВНА 29 - с одним входом, КАРПО 30 - с другим входом ДРПУ 33. Выходы ДРПУ 33 соединены с входами ДУЦО 34. АНПВ 35 связана каналами передачи данных с ДУЦО 34 и ЛС 36, соединенными между собой каналами передачи данных. ДПО 28 и его составные части обеспечивают реализацию известного способа корреляционного пеленгования, например [5 - Патент RU, №2207583 С1, кл. G01S 3/00, G01S 3/14, G01S 3/74, Шевченко В.Н., Вертоградов Г.Г., Иванов Н.М., Берсенев Е.В. Способ пеленгации множества источников радиоизлучения, одновременно попадающих в полосу приема, приоритет 29.11.2001 г., опуб. 27.06.2003 г.]. Антенные решетки полусферического обзора построены на основе известных технических решений, например, полусферических антенных решеток, описанных в [6 -Д.И. Воскресенский, Л.И. Пономарев, B.C. Филиппов. Выпуклые сканирующие антенны, М., «Сов. радио», 1978 г.]. В качестве всенаправленных антенн могут использоваться известные типы антенн, например биконические антенны, описанные в [7 - Г.З. Айзенберг, В.Г. Ямпольский, О.Н. Терешин. Антенны УКВ, часть 1, М., Связь 1977, 384 с]. КВНА 29, КАРПО 30 и КРТП 31, 32 образуются в результате использования нескольких антенн или трактов, обеспечивающих литерное перекрытие рабочего диапазона частот комплектов 29-32. То есть каждая из антенн или каждый из радиоприемных трактов из состава комплектов 29-32 перекрывает часть рабочего диапазона частот комплектов 29-32. Полный рабочий диапазон комплектов 29-32 перекрывается полным набором антенн или радиоприемных трактов из состава комплектов 29-32.
В состав CP 14, фигура 1, входят радиопередающая подсистема (РППС) 15, подсистема обнаружения (ПСО) 21, устройство обработки (УО) 24. РППС 15 и ПСО 21 связаны линиями передачи данных с УО 24. УО 24 связано с УОХИ 26 линиями передачи данных. В состав РППС 15 входят комплект передающих направленных антенн (КПНА) 16, комплект передающих ненаправленных антенн (КПННА) 17, электромеханическое поворотное устройство (ПУ) 18, комплект усилителей (КУ) 19, устройство формирования помех (УФП) 20, переключатель (ПК) 25. Комплекты КПНА 16, КПННА 17 через ПК 25 связаны высокочастотными линиями передачи (кабелями) с КУ J9. КУ 19 связан высокочастотными линиями передачи (кабелями) с УФП 20. УФП 20 связано линиями передачи данных с устройством обработки 24. Управляющий вход ПУ 18 подключен к УО 24. В состав подсистемы обнаружения 21 входят приемная ненаправленная антенна (ПННА) 22 и радиоприемное устройство (РПУ) 23. ПННА 22 соединена с РПУ 23 высокочастотными линиями передачи (кабелями), РПУ 23 соединено с устройством обработки 24 линиями передачи данных.
В состав ЭОС 10 входят телевизионная камера (ТК) 11, тепловизионная камера (ТВК) 12, поворотное устройство (ПУ) 13. ТК 11, ТВК 12, ПУ 13 соединены каналами передачи данных с УОХИ 26.
МФК функционирует следующим образом.
МФК работает в следующих режимах:
- многопозиционный режим защиты территории;
- однопозиционный режим защиты территории;
- режим самозащиты и защиты колонн на стоянке и в движении. При этом МФК обеспечивает выполнение следующих функций:
1 Обнаружение БПЛА, работающего в режиме радиосвязи, средствами пассивной радиолокации.
2 Обнаружение наземных пунктов управления БПЛА, работающих в режиме радиосвязи, средствами пассивной радиолокации.
3 Идентификация известных типов БПЛА по характерным особенностям обнаруженных сигналов или информации, содержащихся в них, путем сравнения базой данных сигналов, имеющейся в МФК.
4 Идентификация известных типов наземных пунктов управления по характерным особенностям обнаруженных сигналов или информации, содержащихся в них, путем сравнения базой данных сигналов, имеющейся в МФК.
5 Пеленгование обнаруженного средствами пассивной радиолокации БПЛА, работающего в режиме радиосвязи, по азимуту.
6 Пеленгование обнаруженного средствами пассивной радиолокации БПЛА, работающего в режиме радиосвязи, по углу места.
7 Определение местоположения (географические координаты, высота) БПЛА и/или наземного пункта управления БПЛА, работающих в режиме радиосвязи, средствами пассивной радиолокации.
8 Выявление (идентификация в качестве БПЛА) БПЛА, работающего в режиме радиосвязи, с неизвестными типами сигналов связи и передачи данных.
9 Выявление (идентификация в качестве наземного пункта управления БПЛА) наземного пункта управления БПЛА, работающего в режиме радиосвязи, с неизвестными типами сигналов связи и передачи данных.
10 Определение характеристик сигнала радиоподавления на основе информации об обнаруженном типе БПЛА и/или наземном пункте управления, имеющейся в базе данных сигналов МФК.
11 Определение характеристик сигнала радиоподавления обнаруженного БПЛА и/или наземного пункта управления БПЛА с неизвестными типами сигналов и передачи данных.
12 Обнаружение и определение местоположения (географические координаты, высота) БПЛА, работающего в режимах радиомолчания или радиосвязи, средствами активной радиолокации.
13 Трассовое сопровождение БПЛА, работающего в режимах радиомолчания или радиосвязи, средствами активной радиолокации.
14 Выделение БПЛА, работающего в режимах радиомолчания или радиосвязи, на фоне естественных ложных целей (птиц) средствами активной радиолокации.
15 Обнаружение и сопровождение БПЛА, работающего в режимах радиомолчания или радиосвязи, аппаратурой ЭОС 10.
16 Отображение визуальной информации, полученной в видимом или тепловом диапазоне аппаратурой ЭОС 10, на экран РМО 27.
17 Определение характеристик сигнала радиоподавления обнаруженного БПЛА по результатам его обнаружения САР 1 или ЭОС 10.
18 Формирование и излучение сигнала помехи каналам радиосвязи и/или спутниковой навигации аппаратурой CP 14 в направлении БПЛА.
19 Формирование окон прозрачности в сигнале помехи, излучаемом аппаратурой CP 14, в заданных диапазонах частот.
20 Автоматическое определение местоположения и ориентации (азимут, крен, тангаж) носителя МФК и ВППР 7.
21 Автоматическое или по команде оператора наведение любой из систем МФК (САР 1, СПР 6, CP 14, ЭОС 10) по результатам работы одной или нескольких других систем МФК.
22 Принятие решения об обнаружении БПЛА по результатам работы нескольких систем МФК.
23 Принятие решения об обнаружении БПЛА по результатам работы одной системы МФК с адаптированными к характеристикам по дальности критериями обнаружения и выявления БПЛА.
24 Обнаружение и выявление сигналов линий радиоуправления взрывными устройствами.
25 Формирование и излучение сигналов радиоподавления линиям радиоуправления взрывными устройствами.
26 Обеспечение защиты территорий и объектов и самозащиты МФК на стоянке.
27 Обеспечение защиты самозащиты МФК и защиты колонн в движении.
Перечисленные в пунктах 2, 4, 6, 7, 8, 9, 11, 14, 17, 20, 23, 24-26 функции МФК не были реализованы в прототипе и расширяют функциональные возможности описываемого МФК относительно прототипа.
В многопозиционном режиме защиты территории реализуются функции МФК, перечисленные в пунктах 1-23, 26. В однопозиционном режиме защиты территории реализуются функции МФК, перечисленные в пунктах 1-6, 8, 10, 11-23, 26. В режиме самозащиты и защиты колонн реализуются функции 1-3, 10, 18-20, 23, 24-25, 27.
В многопозиционном режиме защиты территории ВППР 7, фигура 1, разворачиваются вблизи или внутри защищаемой территории на расстоянии друг от друга, обеспечивающем возможность передачи данных между ВППР 7 и/или СУО 5, энергетическую доступность на защищаемой территории сигналов БПЛА, от которых планируется защита, не менее чем двумя ВППР 7. Наилучшим образом необходимо размещать ВППР 7 таким образом, чтобы лучи, проведенные из места расположения поста в любую точку защищаемой территории, пересекались под углом а от 30° до 120°, фигура 3. При других углах пересечения работоспособность СПР 6 сохранится, однако возможно снижение точности определения местоположения цели в соответствии с результатами, приведенными в [8 -И.С.Кукес, М.Е. Старик. Основы радиопеленгации, М., Сов. радио, 1964, 640 с]. Как правило, это расстояние составляет от 1 км до 10 км. Один из ВППР 7 размещается вблизи или на транспортном носителе МФК. Координаты и ориентация (относительно севера, крен, тангаж) каждого из ВППР 7 определяются в автоматическом режиме АНПВ 35, фигура 2.
В качестве АНПВ 35 может использоваться существующая покупная аппаратура, например, угломерная аппаратура типа МРК-32П [http://кртз.рф/nav_mrc-3 2p.html].
В однопозиционном режиме защиты территории разворачивается только один ВППР 7, фигура 1, расположенный вблизи или на транспортном носителе МФК.
Остальные системы и модули МФК разворачиваются одинаково как в многопозиционном, так и в однопозиционном режимах защиты территории.
Координаты и ориентация (относительно севера, крен, тангаж) аппаратуры МФК определяются в автоматическом режиме модулем ориентации и навигации, который на фигурах 2 и 3 не показан, так как его функциональное назначение такое же, как и у комплекса-прототипа. В качестве модуля ориентации и навигации может использоваться существующая покупная аппаратура, например, угломерная аппаратура типаМРК-32П [15].
БПЛА, осуществляющий полет в режиме радиосвязи, может обнаруживаться одним или несколькими ВППР 7 по излучаемым БПЛА сигналам связи и передачи данных и/или средствами САР 1. Дальность обнаружения БПЛА аппаратурой СПР 6 близка к дальности радиосвязи БПЛА с наземным пунктом управления БПЛА. Так для легких БПЛА (например, типа «Орлан-10») дальность радиосвязи и обнаружения может составить до 120 км. Для мини и микро БПЛА (например, типа «Phantom-4») дальность радиосвязи и обнаружения СПР 6 может составить от 3 до 10 км. Так как эффективная поверхность рассеяния (ЭПР) мини, микро и легких БПЛА мала (составляет от 0,001 до 0,5 м2), дальность их обнаружения САР 1 составляет от 1 км до 15-20 км. В связи с этим возможно обнаружение БПЛА, осуществляющего полет в режиме радиосвязи, как аппаратурой СПР 6 на дальности, превышающей дальность обнаружения аппаратурой САР 1, так и совместно аппаратурой СПР 6 и САР 1.
Сигналы радиосвязи и передачи данных БПЛА принимаются комплектами антенн 29, 30 одного или нескольких ВППР 7 в зависимости от режима работы МФК. Принятые сигналы через КРТП 31, 32 поступают на вход соответствующих каналов ДРПУ 33, где когерентно переносятся на промежуточную частоту. С выходов ДРПУ 33 сигналы промежуточной частоты поступают на соответствующие входы ДУЦО 34, где синхронно оцифровываются. На отдельный вход ДУЦО 34 от АНПВ 35 поступают метки (сигналы) точного времени (например, секундные метки, передаваемые системами спутниковой навигации). В ДУЦО 34 формируются пакеты данных, содержащие принятые оцифрованные сигналы с привязкой к сигналам точного времени. Пакеты данных с выходов ДУЦО 34 поступают для дальнейшей обработки в локальный сервер 36. В локальном сервере 36 осуществляется вычисление пеленга на принятый сигнал по азимуту и углу места и анализ сигнала. Пеленгование производится известным способом корреляционного пеленгования, например [9 - Патент RU, №2207583 С1, кл. G01S 3/00, G01S 3/14, G01S 3/74, Шевченко В.Н., Вертоградов Г.Г., Иванов Н.М., Берсенев Е.В. Способ пеленгации множества источников радиоизлучения, одновременно попадающих в полосу приема, приоритет 29.11.2001 г., опуб. 27.06.2003 г.].
В локальном сервере 36 определяются временные и спектральные характеристики сигналов, анализируется информационная составляющая в сигналах (например, выделяются МАК адреса обнаруженных сигналов при использовании сигналов с Wi-Fi подобной структурой). Производится сопоставление характеристик принятых сигналов и выделенной информации с базой данных сигналов БПЛА и других летательных средств. При совпадении полученного сигнала с одним из сигналов базы данных принимается решение о достоверном обнаружении БПЛА и его типе или о типе обнаруженного летательного средства. В случае, если сигнал не соответствует известному типу БПЛА, производится анализ пеленгов. Если пеленг по углу места больше нуля и превышает ошибку определения пеленга по углу места, то есть значимо показывает, что цель находится на некоторой высоте над поверхностью земли и характеристики сигнала не соответствуют ни одному из разрешенных и известных сигналов воздушных средств других типов (самолетов, вертолетов и т.п.), то принимается решение о достоверном обнаружении БПЛА неизвестного типа. Сигнал записывается в базу данных вновь обнаруженных сигналов для дальнейшего анализа.
Определение того факта, что цель находится на некоторой высоте над поверхностью земли, позволяет решить задачу обнаружения БПЛА средствами пассивной радиолокации на фоне наземных неподвижных и движущихся источников радиоизлучения. Наземные источники радиоизлучения имеют нулевую высоту и, следовательно, нулевую или меньшую ошибки определения пеленга. Прототип, который не позволяет определять угол места цели, не обеспечивает возможность выделения БПЛА средствами пассивной радиолокации на фоне наземных неподвижных и движущихся источников радиоизлучения.
При работе МФК в однопозиционном режиме сигнал тревоги передается в сервер вторичной обработки 9, фигура 1, ВППР 7, а через него в УОХИ 26.
При работе МФК в многопозиционном режиме информация с основными характеристиками каждого обнаруженного сигнала (частота, ширина полосы частот, длительность сигнала передачи, время обнаружения, признак типа БПЛА: тип обнаруженного БПЛА (известный или неизвестный) или отсутствие классификации цели как БПЛА, пеленг на цель по азимуту и углу места) передается через УПД 8 на СВО 9. В сервере вторичной обработки 9 осуществляется вычисление местоположения цели триангуляционным методом [8] по результатам обнаружения и пеленгования цели несколькими ВППР 7. Перед решением задачи определения местоположения цели проверяется, чтобы информация об участвующих в определении местоположения сигналах, переданная от разных ВППР 7, принадлежала одному источнику радиоизлучения, то есть основные спектральные и временные характеристики сигналов, а также время их обнаружения совпадали. По ряду последовательно во времени поступающей информации, соответствующей по спектральным и временным характеристикам сигнала одной цели, строится траектория движения цели. Построение траектории движения может проводиться одним из известных способов и алгоритмов, например, приведенных в [10 - Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. М., Радио и связь, 1993 г., 320 с]. Траекторная информация передается по линиям связи в МОКИ 9.1. В МОКИ 9.1 хранится заранее подготовленная картографическая информация о местности, где производится обнаружение БПЛА. В картографической информации определены места прохождения автотрасс, дорог, тропинок и других объектов, по которым могут перемещаться наземные транспортные средства, а также места прохождения препятствий (лесополосы, овраги, горы и т.п.), по которым перемещение наземных транспортных средств затруднено. В МОКИ 9.1 производится трассово-картографический анализ, то есть сравнение траектории движения цели с местами расположения препятствий и дорог. При выявлении значительной доли трассы, проходящей вне дороги, а также трассы, проходящей через препятствия для передвижения наземных транспортных средств, принимается решение об обнаружении воздушной цели. При этом, если трасса проходит через препятствие, то обнаружение считается достоверным, если движение вне дороги (на расстоянии, превышающим точность определения местоположения цели) составляет более некоторой величины, например 50%, трассы, то обнаружение воздушной цели считается достоверным, если менее этой величины, то обнаружение требует подтверждения другими системами. В случае, когда сигнал по базе данных не идентифицирован как сигнал воздушного средства, отличного от БПЛА, принимается решение об обнаружении БПЛА с приведенной выше достоверностью. Кроме того, обнаружение БПЛА считается достоверным, если цель идентифицирована как БПЛА хотя бы одним из ВППР 7 по критерию совпадения характеристик сигнала с характеристиками базы данных сигналов или по критерию высоты. Результаты обнаружения БПЛА САР 1 передаются вместе с признаком достоверности и установленными координатами, высотой цели, времени обнаружения и основными спектральными и временными характеристиками сигналов в УОХИ 26.
Таким образом СПР 6 обеспечивает, в отличие от прототипа, обнаружение как известных, так и неизвестных типов БПЛА по излучаемым ими сигналам.
Сигналы, излучаемые наземными пунктами управления БПЛА как в однопозиционном, так и в многопозиционном режимах принимаются и обрабатываются аналогично сигналам излучения систем связи и передачи данных БПЛА. В качестве критерия обнаружения наземного пункта управления БПЛА служит идентификация сигнала наземного пункта управления путем сравнения временных, спектральных или информационных характеристик сигнала наземного пункта управления с характеристиками, записанными в базе данных сигналов, и по критерию высоты, меньшей ошибки определения пеленга по углу места. В многопозиционном режиме СПР 6 определяет местоположение наземного пункта управления триангуляционным методом аналогично тому, как определяется местоположение БПЛА (описано выше). Таким образом описываемый МФК позволяет решать задачу определения местоположения наземного пункта управления, в отличии от прототипа.
САР 1, представляющая собой импульсно-доплеровскую РЛС, осуществляет обзор пространства с помощью ЦАФАР 2. ЦАФАР 2 может быть построена на основе известных принципов, изложенных в [11 - Добычина Е.М., Кольцов Ю.В. Цифровые антенные решетки в бортовых радиолокационных системах. М.: МАИ, 2013. 160 с]. В предлагаемом многофункциональном комплексе цифровые образы всех сигналов, используемых в процессе работы, хранятся в МХОРС 4. В соответствии с заданием, получаемым от СУО 5, тот или иной образ сигнала извлекается из МХОРС 4 и поступает на вход ЦАФАР 2. Такой способ формирования сигнала минимизирует время, необходимое для его формирования (оно сводится к времени извлечения сигнала из памяти) и обеспечивает возможность оперативного измерения вида сигнала и/или извлечения одновременно нескольких сигналов. В ЦАФАР 2 каждый извлеченный сигнал в цифровой форме поступает на вход каждого канала ЦАФАР 2, умножается на соответствующий комплексный коэффициент, формируя необходимое амплитудно-фазовое распределение на элементах ЦАФАР 2. При использовании нескольких сигналов сигналы в цифровой форме суммируются, после чего в каждом канале ЦАФАР 2 синхронно преобразуются в аналоговую форму, когерентно переносятся на высокую частоту, усиливаются и излучаются в пространство. При использовании нескольких каналов их характеристики выбираются таким образом, чтобы спектры обоих каналов размещались в пределах рабочей полосы частот ЦАФАР 2. При приеме отраженного от цели сигнала он когерентно переносится в каждом канале на промежуточную частоту, усиливается, синхронно оцифровывается, для каждого из используемых сигналов осуществляется согласованная фильтрация. Отфильтрованные сигналы в каждом канале ЦАФАР 2 умножаются на соответствующий комплексный коэффициент, обеспечивающий синфазное суммирование сигналов с заданного направления, после чего в цифровой форме суммируются, формируя цифровые потоки, количество которых соответствует количеству используемых сигналов.
В описываемой САР 1 обеспечивается возможность формирования двух лучей. Обзорный луч осуществляет постоянное сканирование сектора работы, обнаружение целей и определение местоположения цели. При решении задачи обнаружения целей, перемещающихся с малой скоростью, необходимо длительное наблюдение целей для выделения их на фоне неподвижных целей с использованием методов доплеровской селекции целей. Так при работе в S диапазоне частот, характерная длина волны 0,1 м, и скорости цели 1,5 м/с доплеровский сдвиг частот составит
где ν - скорость цели;
λ - длина волны.
Для определения такого доплеровского сдвига частоты время наблюдения должно быть не менее 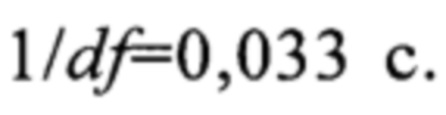 При ширине диаграммы направленности антенны РЛС 5° и стоянии в одном направлении необходимый для доплеровской селекции целей интервал времени, период обновления информации в секторе работы 90×90° составит 10,69 с, что неприемлемо. С целью уменьшения периода обновления информации в САР 1 реализован режим работы с вложенными пачками, когда от импульса к импульсу происходит изменение направления работы обзорного луча. При этом излучение двух последовательно идущих импульсов (импульсы излучаются в разных направлениях) происходит через время, необходимое для распространения импульса на выбранное максимальное расстояние и обратно. Возврат к работе в направлении по цели происходит через достаточно большой интервал времени, определяемое длительностью пачки и количеством импульсов в ней. Количество импульсов в пачке определяется необходимостью энергии накопления сигнала для обеспечения энергетической доступности цели и разрешения по скорости. Так при 32 импульсах в пачке время между импульсами, излучаемыми в одном направлении, может достигать от 1 до 3 мс. Это обеспечит как энергетическую доступность целей типа БПЛА, так и необходимый уровень селекции и разрешения целей по скорости. При этом скважность сигнала по работе в одном направлении может достигать от 100 до 1000. Время между двумя последовательно излучаемыми импульсами составляет, например, от 33 мкс до 166 мкс.При таком режиме работы с вложенными пачками период обновления информации составит в секторе работы ЦАФАР 2 90x90° от 0,1 до 0,3 с, а в секторе работы 360x90° не более 1-2 с. Однако такие интервалы между импульсами не позволяют выявить относительные движения частей цели между собой, что является существенным классифицирующим признаком БПЛА выделения БПЛА на фоне естественных ложных целей (птиц, насекомых и т.п.) [12 -P.Molchanov and ect. Classification of small UAVs and birds by micro-Doppler signatures, International Journal of Microwave and Wireless Technologies, v.6 issue 3-4, June2014,pp.435-444]. С целью классификации цели в описываемой САР 1 обеспечивается возможность формирования одновременно с обзорным лучом луча классификации. Каждый из импульсов, излучаемых в луче классификации, излучается одновременно с импульсами обзорного луча в направлении классифицируемой цели. При этом скважность облучения цели увеличивается, по сравнению с обзорным лучом, от 10 до 1000 раз. Для обеспечения необходимого энергетического доступа к цели мощность излучения в луче классификации может быть уменьшена относительно мощности излучения в обзорном луче на величину скважности, то есть, например, от 10 до 30 дБ. При этом дальность работы обзорного луча 1 практически не изменится. Разрешающая способность по скорости в луче классификации увеличится пропорционально скважности обзорного луча. В результате обеспечивается возможность определения микродоплеровского спектра цели и выделения по скорости относительного движения частей цели. Зная эти относительные скорости, возможно классифицировать цель, выделив на фоне естественных ложных целей БПЛА.
При ширине диаграммы направленности антенны РЛС 5° и стоянии в одном направлении необходимый для доплеровской селекции целей интервал времени, период обновления информации в секторе работы 90×90° составит 10,69 с, что неприемлемо. С целью уменьшения периода обновления информации в САР 1 реализован режим работы с вложенными пачками, когда от импульса к импульсу происходит изменение направления работы обзорного луча. При этом излучение двух последовательно идущих импульсов (импульсы излучаются в разных направлениях) происходит через время, необходимое для распространения импульса на выбранное максимальное расстояние и обратно. Возврат к работе в направлении по цели происходит через достаточно большой интервал времени, определяемое длительностью пачки и количеством импульсов в ней. Количество импульсов в пачке определяется необходимостью энергии накопления сигнала для обеспечения энергетической доступности цели и разрешения по скорости. Так при 32 импульсах в пачке время между импульсами, излучаемыми в одном направлении, может достигать от 1 до 3 мс. Это обеспечит как энергетическую доступность целей типа БПЛА, так и необходимый уровень селекции и разрешения целей по скорости. При этом скважность сигнала по работе в одном направлении может достигать от 100 до 1000. Время между двумя последовательно излучаемыми импульсами составляет, например, от 33 мкс до 166 мкс.При таком режиме работы с вложенными пачками период обновления информации составит в секторе работы ЦАФАР 2 90x90° от 0,1 до 0,3 с, а в секторе работы 360x90° не более 1-2 с. Однако такие интервалы между импульсами не позволяют выявить относительные движения частей цели между собой, что является существенным классифицирующим признаком БПЛА выделения БПЛА на фоне естественных ложных целей (птиц, насекомых и т.п.) [12 -P.Molchanov and ect. Classification of small UAVs and birds by micro-Doppler signatures, International Journal of Microwave and Wireless Technologies, v.6 issue 3-4, June2014,pp.435-444]. С целью классификации цели в описываемой САР 1 обеспечивается возможность формирования одновременно с обзорным лучом луча классификации. Каждый из импульсов, излучаемых в луче классификации, излучается одновременно с импульсами обзорного луча в направлении классифицируемой цели. При этом скважность облучения цели увеличивается, по сравнению с обзорным лучом, от 10 до 1000 раз. Для обеспечения необходимого энергетического доступа к цели мощность излучения в луче классификации может быть уменьшена относительно мощности излучения в обзорном луче на величину скважности, то есть, например, от 10 до 30 дБ. При этом дальность работы обзорного луча 1 практически не изменится. Разрешающая способность по скорости в луче классификации увеличится пропорционально скважности обзорного луча. В результате обеспечивается возможность определения микродоплеровского спектра цели и выделения по скорости относительного движения частей цели. Зная эти относительные скорости, возможно классифицировать цель, выделив на фоне естественных ложных целей БПЛА.
CAP 1 функционирует следующим образом. САР 1 с помощью обзорного луча осуществляет излучение и прием радиолокационного сигнала. Информация о характеристиках отраженного от цели луча и о местоположении цели передается в сервер управления и обработки 5. В сервере управления и обработки осуществляется построение траектории движения цели, анализ характеристик отраженных радиолокационных сигналов и сравнение их с базой данных отраженных сигналов для различных типов целей. Если устанавливается, что отраженный сигнал принадлежит одному из известных типов БПЛА и высота цели превышает ошибку определения направления на цель по углу места, то принимается решение, что достоверно обнаружен БПЛА одного из известных типов. Если отраженный радиолокационный сигнал не совпадает ни с одним из известных типов БПЛА, то в МОКИ 5.2 СУО 5 производится анализ траектории цели, построенной по нескольким переданным в сервер управления и обработки отсчетам аналогично тому, как было описано ранее при описании работы МОКИ 9.1 СПР 6. МОКИ 5.2 сравнивает траекторию движения цели с информацией о дорогах и других возможных путях перемещения наземных целей, с информацией о препятствиях для перемещения наземных целей (лесополосы, овраги, реки и т.п.). В случае, если траектория движения цели не совпадает с возможными путями и/или пересекает препятствия или если высота цели превышает ошибку определения высоты системой активной радиолокации, то принимается решение об обнаружении воздушной цели. После идентификации цели в качестве воздушной цели СУО 5 выдает команду на формирование и обработку луча классификации. Типы импульсов луча обнаружения и луча классификации передаются из МХОРС 4 в ЦАФАР 2, откуда и излучаются в направлении цели. Импульсы луча классификации излучаются одновременно с импульсами обзорного луча. Импульсы луча классификации излучаются постоянно с определенной скважностью в направлении классифицируемой цели. Импульсы обзорного луча, как было сказано выше, постоянно изменяют направление излучения. Таким образом скважность работы луча классификации по цели существенно уменьшается относительно скважности обзорного луча. Мощность излучения сигнала в луче классификации меньше мощности излучения в обзорном луче пропорционально уменьшению скважности. В результате этого в луче классификации формируется сигнал с высокой частотой повторения импульсов, который путем анализа доплеровского сдвига частоты высокой точности позволяет выявить относительные движения частей цели относительно друг друга (микродоплер), за счет чего можно выявить БПЛА на фоне целей естественного происхождения (птиц, насекомых, воздушных образований и т.п.). Для птиц характерно движение частей тела (крыльев) относительно корпуса с частотой от 10 до 30 Гц с амплитудой сигнала, близкого к амплитуде отраженного от цели сигнала. Для БПЛА уровень микродоплеровских компонент ниже уровня отражения от цели в целом на 10-20 дБ, частота доплеровского сдвига соответствует от 50 до 200 Гц. Микродоплеровский анализ, а также анализ признаков воздушных целей, отличных от БПЛА, производится в модуле классификации 5.1. В результате осуществляется обнаружение и выявление неизвестных типов БПЛА на фоне других целей естественного или искусственного происхождения. При выявлении значительной доли трассы цели, проходящей вне дороги, а также трассы, проходящей через препятствия для передвижения наземных транспортных средств, принимается решение об обнаружении воздушной цели. При этом, если трасса проходит через препятствие, то обнаружение считается достоверным, если движение вне дороги (на расстоянии, превышающим точность определения местоположения цели) составляет расстояние более некоторой величины, например 50%, трассы, то обнаружение воздушной цели считается достоверным, если менее этой величины, то обнаружение требует подтверждения другими системами. В случае, если путем микродоплеровского анализа установлено, что цель не относится к типу ложных целей естественного происхождения, то принимается решение об обнаружении БПЛА с приведенной выше достоверностью. Информация об обнаруженных целях и трассах выводится на экран РМО 27.
ЭОС 10 по целеуказаниям от САР1, СПР 6 или оператора, переданным через УОХИ 26, наводится в заданное направление с помощью электромеханического ПУ 13. Изображение с ТК 11 и/или ТВК 12 поступает в УОХИ 26 и с него на экран РМО 27. Обнаружение и распознавание цели проводится оператором путем визуального наблюдения за выведенным изображением или автоматически путем сравнения, проводимого в УОХИ 26, с базой данных изображений комплекса. При совпадении изображений с изображением БПЛА в базе данных комплекса или визуальном опознавании БПЛА оператором принимается решение о достоверном обнаружении БПЛА.
САР 1, СПР 6, ЭОС 10 выполнены таким образом, что обеспечивают возможность обнаружения и выделения как известных, так и неизвестных БПЛА на фоне других целей независимо от других систем. Для описываемого комплекса достаточно обнаружение БПЛА лишь одной из его систем. В качестве критерия принятия решения об обнаружении БПЛА принимается решение задачи его достоверного обнаружения одной из систем комплекса или обнаружение двумя системами с меньшей достоверностью. Таким образом дальность работы комплекса определяется наибольшей дальностью работы всех систем обнаружения БПЛА. То есть дальность работы, по сравнению с прототипом, увеличивается.
CP 14 обеспечивает возможность работы в следующих режимах:
- режим радиоподавления каналов управления и навигации БПЛА по внешнему целеуказанию;
- режим автономного радиоподавления каналов управления и навигации БПЛА;
- режим автономного радиоподавления линий управления радиовзрывателями.
В режиме радиоподавления каналов управления и навигации БПЛА по внешнему целеуказанию, целеуказания поступают от УОХИ 26 по результатам анализа работы САР 1, СПР 6, ЭОС 10 или по команде оператора. В целеуказании выдается направление, тип БПЛА и/или диапазон частот сигнала помехи. При поступлении целеуказания в УО 24 анализируется тип БПЛА и передается команда на формирование сигнала помехи в УФП 20, где и формируется сигнал помехи каналам управления и навигации БПЛА в соответствии с характеристиками сигнала помехи для обнаруженного типа БПЛА, хранящемся в памяти УФП 20. При обнаружении неизвестного типа БПЛА и/или наземного пункта управления с известным диапазоном частот работы систем связи БПЛА осуществляется постановка помехи каналам навигации БПЛА и формирование шумовой помехи на рабочих диапазонах частот БПЛА и/или наземного пункта управления. При обнаружении неизвестного БПЛА, осуществляющего полет в режиме радиомолчания, осуществляется постановка помехи каналам навигации и в наиболее распространенных международных каналах радиосвязи БПЛА (ISM, Wi-Fi, сетей сотовой связи). КПНА 16 с помощью ПУ 18 ориентируется в заданном направлении, сигнал помехи с выхода УФП 20 усиливается в КУ 19 и через ПК 25 и КПНА 16 излучается в заданном направлении.
Режимы автономного подавления радиоподавления каналов управления и навигации БПЛА и линий управления радиовзрывателями функционируют одинаково и могут быть совмещены. В этих режимах к выходу КУ 19 через ПК 25 подключается КПННА 17. Эфирные сигналы принимаются ПННА 22, переносятся на промежуточную частоту, оцифровываются в РПУ 23 и поступают для анализа в УО 24. В УО 24 происходит сравнение временных и спектральных характеристик принятых сигналов (длительность, частота, вид модуляции, период повторения, ширина спектра и т.п.) с характеристиками сигналов основных средств, представляющих угрозу (БПЛА, наземные пункты управления, линии управления радиовзрывателями и т.п.). В случае совпадения характеристик принятых сигналов с характеристиками сигналов, записанными в базе данных, принимается решение об обнаружении угрозы. ВУО 24 определяется тип угрозы и в УФП 20 выдается команда на формирование сигнала помехи, адаптированного к обнаруженной угрозе. Вследствие того, что в двух этих режимах используются всенаправленные антенны, они могут быть использованы как на стоянке, так и в движении, обеспечивая самозащиту комплекса и защиту колонны, в которой перемещается комплекс при отключении работы остальных систем комплекса и независимо от них.
При включении сигнала помехи с целью исключения неблагоприятного воздействия на остальные системы МФК в УОХИ 26 передается информация о работе CP 14 на излучение и осуществляется отключение приемных радиосистем МФК. В соответствии с заранее установленным заданием в сигнале помехи могут быть сформированы окна прозрачности по частоте, исключающие излучение сигнала помехи в пределах заданных диапазонов частот.
В соответствии с приведенным выше описанием был изготовлен образец МФК, который прошел необходимые испытания. Он обеспечил обнаружение и радиоподавление известных и неизвестных БПЛА микро, мини и легкого класса на расстоянии от 6 км до 70 км в зависимости от типа БПЛА и используемой системы, а также противодействие различным видам угроз.
Таким образом, из представленных материалов следует, что выполнение систем, входящих в состав многофункционального комплекса средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса, и их подсистем и устройств, не вызовет затруднений ввиду того, что указанные элементы широко используются, о чем свидетельствует образец МФК, прошедший ряд испытаний, в ходе которых подтверждена его эффективность.
Вышеизложенное позволяет сделать вывод о том, что предлагаемый многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса соответствует критерию «промышленная применимость» для изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| Система и способ защиты контролируемой зоны от беспилотных транспортных средств | 2019 |
|
RU2746102C1 |
| Система и способ защиты от беспилотных летательных аппаратов в воздушном пространстве населенного пункта | 2019 |
|
RU2746090C2 |
| Модуль управления параметрами помехового сигнала | 2025 |
|
RU2840341C1 |
| Система и способ обнаружения и противодействия беспилотным летательным аппаратам | 2019 |
|
RU2755603C2 |
| Способ радиопротиводействия беспилотному воздушному судну | 2024 |
|
RU2839399C1 |
| Способ испытания систем радиоэлектронного подавления беспилотных летательных аппаратов | 2023 |
|
RU2817392C1 |
| Способ радиоэлектронного мониторинга и активного радиоэлектронного противодействия | 2024 |
|
RU2837696C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
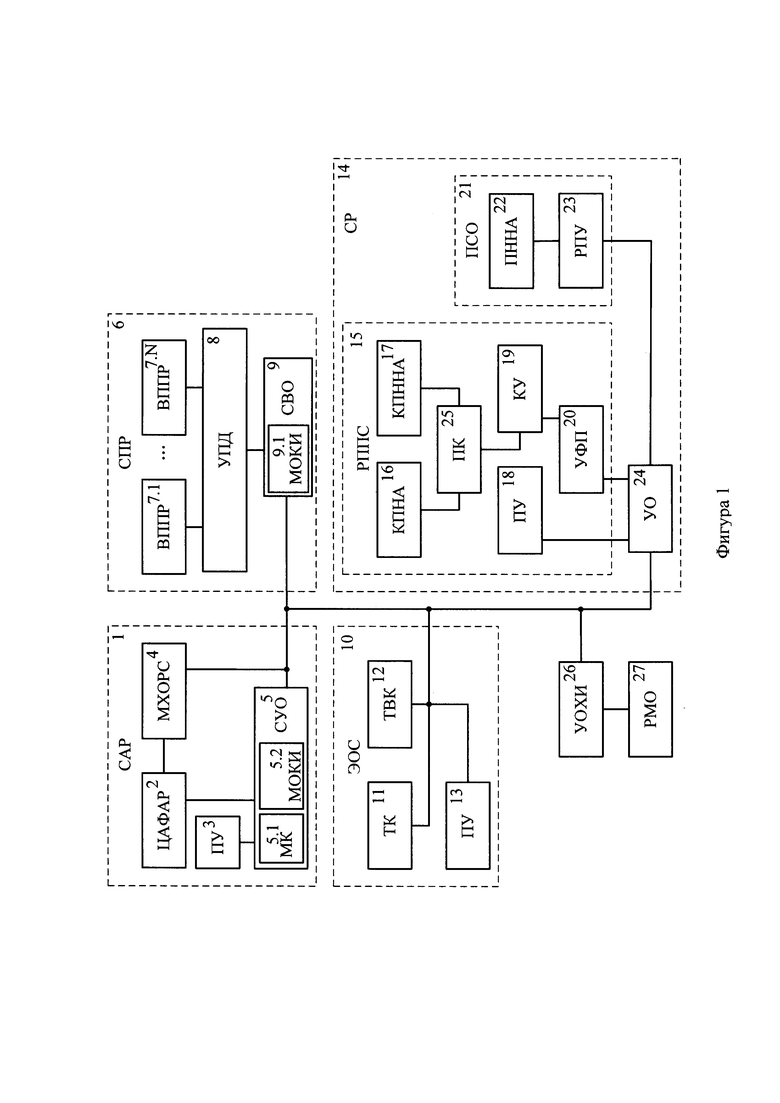
Изобретение относится к области противодействия выполнению задач БПЛА и может быть использовано для комплексного контроля за воздушной обстановкой, обнаружения, пеленгации, распознавания и нейтрализации функционирования аппаратуры БПЛА. Основу комплекса составляют системы активной и пассивной радиолокации, электронно-оптическая система, система радиоподавления, устройство обработки и хранения информации и модуль навигации и ориентации. Входящие в состав системы активной радиолокации твердотельная цифровая активная фазированная антенная решетка и импульсно-доплеровский многолучевой трехкоординатный радиолокатор S диапазона частот в совокупности с сервером управления и обработки обеспечивают возможность одновременной работы в режимах излучения и приема по нескольким пространственным направлениям с разными характеристиками сигналов. Система пассивной радиолокации выполнена на основе распределенной системы с N, где N не менее двух, выносными постами, в состав каждого из которых входят двухкоординатный пеленгатор-обнаружитель и аппаратура навигации и привязки ко времени. Повышается точность обнаружения и возможность противодействия БПЛА. 3 з.п. ф-лы, 3 ил.
1. Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса, включающий в свой состав систему пассивной радиолокации, систему активной радиолокации, электронно-оптическую систему, содержащую телевизионную и тепловизионную камеры с поворотным устройством; устройство обработки и хранения информации, систему радиоподавления, включающую устройство формирования помех, комплект усилителей и комплекты передающих ненаправленных и направленных антенн, ориентируемых в направлении цели по азимуту и углу места с помощью электромеханического поворотного устройства, рабочее место оператора, модуль навигации и ориентации, систему электропитания, систему связи, транспортное средство, отличающийся тем, что введены в составе системы пассивной радиолокации N, не менее двух, выносных постов, аппаратура навигации и привязки ко времени на каждом из выносных постов, устройство передачи данных с выносных постов и сервер вторичной обработки с модулем обработки картографической информации, в составе системы активной радиолокации - модуль хранения образов радиолокационных сигналов и сервер управления и обработки с модулем классификации и модулем обработки картографической информации, в составе системы радиоподавления - подсистема обнаружения, радиопередающая подсистема и устройство обработки; каждый из N выносных постов с помощью устройства передачи данных связан с сервером вторичной обработки системы пассивной радиолокации, который связан линиями передачи данных с устройством обработки и хранения информации, модуль обработки картографической информации линиями передачи данных связан с сервером вторичной обработки, сервер управления и обработки системы активной радиолокации связан линиями передачи данных с модулем хранения образов радиолокационных сигналов, модулем обработки картографической информации, модулем классификации, а также с антенной системы активной радиолокации и с устройством обработки и хранения информации, устройство обработки в составе системы радиоподавления связано линиями передачи данных с подсистемой обнаружения, радиопередающей подсистемой, устройством формирования помех, поворотным устройством системы радиоподавления и устройством обработки и хранения информации, формирование сигнала тревоги об обнаружении БПЛА осуществляется на основе критериев, адаптированных к дальности работы каждой из систем комплекса и к типам обнаруживаемых БПЛА.
2. Многофункциональный комплекс по п. 1, отличающийся тем, что система активной радиолокации выполнена в виде импульсно-доплеровского трехкоординатного радиолокатора, соединенного с антенной, модуля хранения образов радиолокационных сигналов и сервера управления и обработки с модулем классификации и модулем обработки картографической информации, к серверу управления и обработки подключен управляющий вход поворотного устройства, на котором размещена антенна, в качестве антенны использована твердотельная цифровая активная фазированная антенная решетка, обеспечивающая возможность одновременной работы в режимах излучения и приема по нескольким пространственным направлениям с разными характеристиками сигналов, твердотельная цифровая активная фазированная антенная решетка соединена линиями передачи данных с сервером управления и обработки и с модулем хранения образов радиолокационных сигналов, сервер управления и обработки соединен линиями передачи данных с модулем хранения образов радиолокационных сигналов и с помощью устройства обработки и хранения информации с рабочим местом оператора, при этом импульсно-доплеровский трехкоординатный радиолокатор определяет дальность, азимут, угол места цели и скорость цели, а также относительные скорости перемещения отдельных частей цели, на основе чего осуществляется разделение БПЛА и целей естественного происхождения, производит выделение БПЛА на фоне ложных целей путем анализа особенностей отраженных радиолокационных сигналов, и/или анализа относительных скоростей движения частей цели, и/или на основе трассово-картографического анализа, состоящего в анализе прохождения трассы над особенностями местности.
3. Многофункциональный комплекс по п. 1, отличающийся тем, что в сервере вторичной обработки подсистемы пассивной радиолокации, связанном линиями передачи данных с устройством обработки и хранения информации, а также с модулем обработки картографической информации, классификация цели как беспилотного летательного аппарата происходит на основе критерия об идентификации беспилотного летательного аппарата, на выносных постах по временным, спектральным или информационным характеристикам принятых сигналов, и/или на основе критерия нахождения обнаруженного источника радиоизлучения над землей, и/или в результате трассово-картографического анализа на основе критерия прохождения трассы цели вдали от дорог, над сложно проходимыми особенностями местности, классификация цели как наземного пункта управления происходит на основе информации об идентификации наземного пункта управления, переданной с выносных постов по временным, спектральным или информационным характеристикам принятых сигналов.
4. Многофункциональный комплекс по п. 1, отличающийся тем, что радиопередающая подсистема системы радиоподавления включает комплект передающих направленных и комплект передающих ненаправленных антенн, каждый из которых может быть подключен через двухканальный переключатель к комплекту усилителей, соединенному с устройством формирования помех, подсистема обнаружения состоит из последовательно соединенных приемной ненаправленной антенны и радиоприемного устройства, подключенных к устройству обработки; радиопередающая подсистема обеспечивает возможность работы в следующих режимах: режим радиоподавления каналов управления и навигации беспилотного летательного аппарата по внешнему целеуказанию, режим автономного радиоподавления каналов управления и навигации беспилотного летательного аппарата и режим радиоподавления линий управления радиовзрывателями, в режиме радиоподавления по внешним целеуказаниям устройство формирования помех формирует сигналы помехи каналам управления беспилотного летательного аппарата, адаптированные для каждого из известных типов беспилотных летательных аппаратов, сигналы шумовой помехи для неизвестных типов беспилотных летательных аппаратов в соответствии с заданием, получаемым от сервера управления и обработки системы активной радиолокации, и сигналы помехи радионавигационным системам, сигналы помехи через комплект усилителей излучаются в направлении подавляемого источника радиоизлучения, в режиме автономного радиоподавления подсистема обнаружения сигнала осуществляет всенаправленное обнаружение радиосигнала беспилотного летательного аппарата по базе данных сигналов беспилотных летательных аппаратов, устройство формирования помехи формирует сигналы помехи каналам управления и навигации беспилотного летательного аппарата, адаптированные для каждого из известных типов беспилотных летательных аппаратов, сигналы помехи усиливаются и излучаются через всенаправленные антенны, в режиме радиоподавления линий управления радиовзрывателями подсистема обнаружения сигнала осуществляет всенаправленное обнаружение радиосигнала линии управления радиовзрывателями, устройство формирования помехи формирует сигнал помехи, адаптированный к типу канала управления радиовзрывателями, сигналы помехи усиливаются и излучаются через всенаправленные антенны, в режимах автономного радиоподавления каналов управления и навигации беспилотного летательного аппарата и режиме радиоподавления линий управления радиовзрывателями система радиоподавления может работать как на стоянке, так и на ходу, обеспечивая самозащиту комплекса.
| US 9715009 B1, 25.07.2017 | |||
| Способ функционального подавления беспилотного летательного аппарата | 2018 |
|
RU2700207C1 |
| Способ защиты радиолокационной станции от не обнаруживаемых малоразмерных беспилотных летательных аппаратов и устройство для его осуществления | 2018 |
|
RU2691645C1 |
| EP 3447536 A1, 27.02.2019 | |||
| CA 3015779 A1, 29.03.2019. | |||

