ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области противодействия беспилотным воздушным судам (БВС) и может быть использовано в самых простых по аппаратному составу системах противодействия БВС, состоящих из станций радиомониторинга (СРМ) и станций радиопротиводействия (СРП). Представленный способ предусматривает обнаружение и оценку координат, главным образом, дальности, БВС, как радиоизлучающих, так и радиомолчащих, а также БВС, обладающих гибкой логикой реакции на обнаружение организованных помех. Способ позволяет комплексной системе радиопротиводействия на небольших дальностях дополнительно выполнять отдельные функции радиолокатора обнаружения цели и оценки координат (дальности) цели и с помощью этих данных анализировать эффективность радиопротиводействия.
УРОВЕНЬ ТЕХНИКИ
Существует множество различных способов противодействия БВС. Они отличаются уровнем сложности и стоимостью аппаратуры для реализации, но в их основе лежат стандартные базовые операции: с помощью аппаратуры СРМ принимают радиосигнал, излучаемый БВС и представляющий собой, как правило, сигнал каналов управления БВС и каналов передачи данных. Затем с помощью цифрового процессора обработки сигнала (ЦПОС) СРМ вычисляют спектр этого сигнала, определяют направление на источник принимаемого сигнала, распознают тип сигнала, определяют тип и параметры (частоту, ширину полосы излучаемых частот и др.). Полученные таким образом данные необходимы не только для предупреждения об угрозе, но, главным образом, для формирования сигнала эффективного радиопротиводействия, поэтому СРМ, как правило, работают в едином комплексе с СРП, например, станциями активных помех. СРП могут осуществлять радиоэлектронное воздействие на БВС, например, для перехвата управления БВС, для создания помех в системе управления БВС, для создания помех в устройствах геопозиционирования БВС или для создания помех в системах бортовой электроники. Получив исходные данные от СРМ, СРП с помощью устройства формирователя сигнала (УФС) формируют эффективный помеховый радиосигнал с выбранными параметрами и с помощью радиопередающего устройства и антенны излучают его в направлении БВС.
Описанный способ противодействия БВС применяется в самых простых системах, требующих минимума аппаратуры, например, в комплексах обнаружения и защиты от БВС «Купол», «Sky-Hunter», «Sky-Center» (https://antidron.pro/katalog/sfericheskaja-zashhita-ot-bespilotnikov-kupol/strizh). В некоторых системах аппаратура СРМ и СРП, реализующих указанный способ, объединяются и конструктивно. Например, комплекс «Купол» состоит из двух основных частей: устройства обнаружения БВС, обеспечивающего прием, запись и анализ сигналов в заданных частотных диапазонах, и устройства защиты от БВС (постановка помех в диапазонах частот каналов управления и навигации), причем устройство обнаружения и устройство защиты выполнены единым модулем.
Данный способ противодействия БВС для настоящего изобретения принят за прототип.
Он привлекателен сравнительной простотой оборудования, необходимого для реализации способа. Сравнительно малая стоимость оборудования позволяет применять этот способ на множестве защищаемых объектов. Однако, данный способ имеют следующие очевидные недостатки: он не позволяет обнаруживать БВС, находящееся в режиме радиомолчания, когда оно не управляется с внешнего пульта, а летит по заданным координатам, например, по данным инерциальной навигационной системы. Вторым существенным недостатком описанного простого способа противодействия является то, что он не позволяет выполнить оценку эффективности своего помехового воздействия на БВС, поскольку не позволяет объективно отследить реакцию БВС на это воздействие. Оба недостатка обусловлены отсутствием в аппаратном составе комплекса других датчиков для обнаружения и наблюдения за БВС.
Указанные недостатки преодолеваются в сложных аппаратурных комплексах, реализующих операции обнаружения и наблюдения за БВС с помощью разнообразных датчиков. Например, в патентной заявке РФ №2020121449 предлагается многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса. Основу комплекса составляют системы активной и пассивной радиолокации, электронно-оптическая система, система радиоподавления, устройство обработки и хранения информации и модуль навигации и ориентации. В состав системы активной радиолокации входят твердотельная цифровая активная фазированная антенная решетка (АФАР) и импульсно-доплеровский многолучевой трехкоординатный радиолокатор S диапазона частот в совокупности с сервером управления и обработки. Система пассивной радиолокации выполнена на основе распределенной системы с несколькими выносными постами, в состав каждого из которых входят двухкоординатный пеленгатор-обнаружитель и аппаратура навигации и привязки ко времени.
Очевидно, что столь сложный по аппаратурному составу комплекс может быть применен только в исключительных случаях, поскольку отличается высокой сложностью и стоимостью аппаратуры. Требование наличия АФАР - весьма дорогостоящей аппаратуры - и целого комплекса прочих РЛС делает предлагаемый способ борьбы с РЛС применимым только на отдельных - исключительно важных - объектах. Но для большинства объектов, требующих защиты от БВС требуется значительное снижение стоимости аппаратуры комплекса защиты. Очевиден недостаток реализуемого здесь способа противодействия БВС с точки зрения большинства типовых объектов защиты - высокая стоимость аппаратурной реализации
В менее дорогих комплексах для реализации режима обнаружения радиомолчащих БВС и определения их координат в комплекс аппаратуры дополнительно включаются, как правило, лишь минимально необходимая аппаратура - радиолокационные станции (РЛС).
Примером может служить способ противодействия БВС, реализуемый в системе «Kaspersky Antidrone» (https://antidrone.kaspersky.com/ru/solution/hardware/radar/). Система имеет в своем составе активную РЛС, которая интегрирована с СРМ и другими датчиками в единый комплекс для совместной программной обработки данных. В этой системе с помощью РЛС обнаруживают БВС, находящихся в режиме радиомолчания, а также объективно отслеживают результативность радиопротиводействия по поведению БВС, получают данные о текущей дальности БВС и по ним определяют, зависло ли БВС на месте, продолжает ли БВС атаку объекта или вынуждено уходить от объекта атаки. Однако, включение в состав оборудования РЛС по-прежнему значительно удорожает комплекс, т.к. стоимость даже одной РЛС, как правило, превышает стоимость остального оборудования СРМ и СРП. Включение РЛС в состав оборудования комплекса СРМ и СРП подразумевает также использование сложных способов синхронизации и настройки всех отдельных систем комплекса. Кроме того, использование активной РЛС создает проблемы электромагнитной совместимости (ЭМС) с СРМ, а применение СРП может создавать проблемы ЭМС с самой РЛС. Активная РЛС может также создавать помехи посторонним радиоэлектронным средствам, что создает большие проблемы для размещения комплекса, например, на аэродромах.
Последнего недостатка лишен комплекс противодействия БВС, в котором применена полуактивная РЛС (ПАРЛС). Использование ПАРЛС позволяет применять данный комплекс в т.ч. и для охраны аэропортов от БВС. Например, в мобильном комплексе противодействия БВС «Защита» (https://nii-vektor.ru/mobilnyj-kompleks-protivodejstviya-bpla-zashhita/?ysclid=lxsl7yh4e8907470836) помощью СРМ принимают радиосигнал, излучаемый БВС, определяют направление на источник принимаемого сигнала, вычисляют спектр этого сигнала, распознают тип сигнала, определяют тип и параметры (частоту, ширину полосы излучаемых частот и др.), необходимые для формирования сигнала эффективного радиопротиводействия. Далее эти данные передают на СРП, где формируют помеховый сигнал с выбранными параметрами и излучают его в направлении БВС. Формируют также сигналы для синхронизации работы СРМ и СРП. С помощью ПАРЛС производят обнаружение БВС, в т.ч. осуществляющих полет в режиме радиомолчания, и определяют их координаты, в частности, дальность.
Недостатком этого способа также является повышенная стоимость аппаратуры по сравнению с простейшими аппаратурными комплексами, которые не содержат в своем составе ПАРЛС. Другим недостатком является необходимость работы в точке охраняемого объекта станций подсвета сигнала, например станций цифрового эфирного телевидения, а это условие выполняется не для всех охраняемых объектов.
РАСКРЫТИЕ СУЩНОСТИ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Технической задачей, решаемой в данном изобретении, является обеспечение возможности определения дальности БВС в минимально возможном по аппаратурному составу комплексе СРМ и СРП без использования отдельного блока РЛС или иного обнаружителя и дальномера.
Техническим результатом изобретения является придание самому простому и дешевому аппаратурному комплексу СРМ и СПР дополнительной функции независимого обнаружения и измерения дальности обнаруженного БВС. При этом не применяется отдельный дорогостоящий аппаратурный блок РЛС, а качество выполнения этой дополнительной функции в ближней зоне комплекса может быть достаточным для ряда практических задач.
Поставленная техническая задача решается за счет выполнения дополнительных технологических операций, изменяющих логику и алгоритмы работы аппаратурных блоков СРМ и СРП, что позволяет дополнительно к режиму радиомониторинга и режиму постановки помех реализовать режим измерения дальности до БВС в выделенном временном интервале.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖА
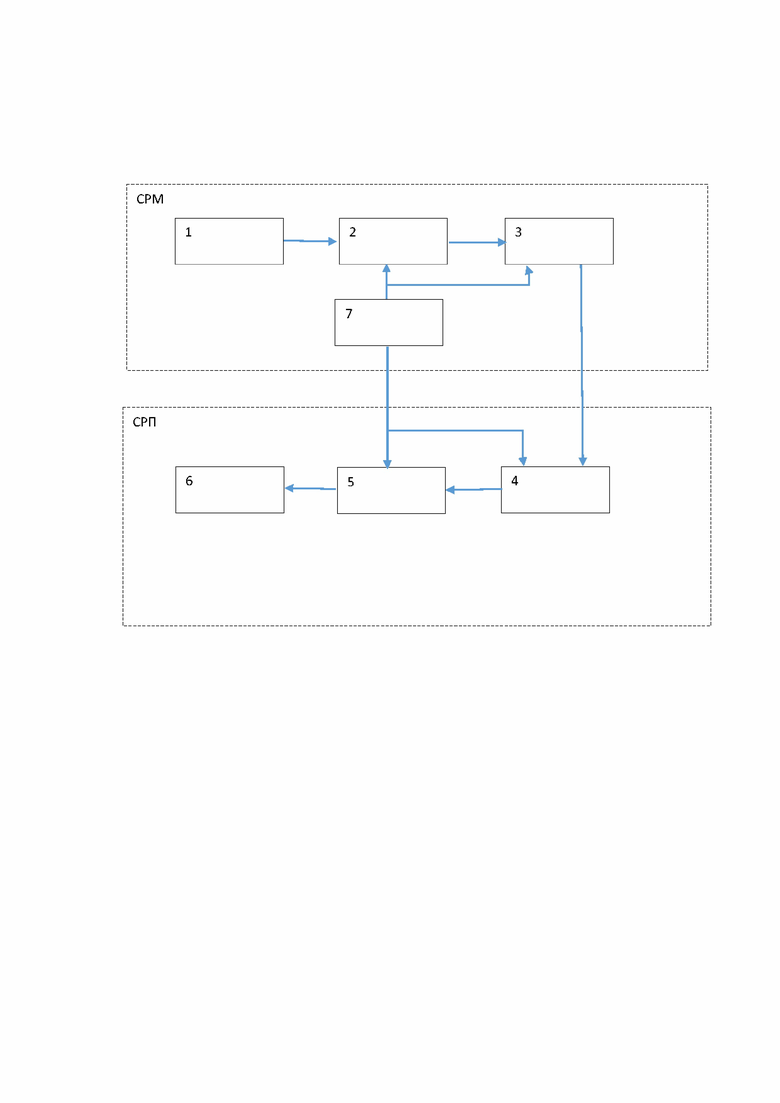
Чертеж - Структурная схема аппаратуры комплекса, состоящего из СРМ и СРП, в котором реализован способ, где
1 - антенное устройство СРМ;
2 - радиоприемное устройство СРМ;
3 - процессор цифровой обработки сигнала СРМ;
4 - синхронизатор;
5 - процессор-формирователь помехового сигнала СРП;
6 - радиопередающее устройство СРП;
7 - антенное устройство СРП.
Аппаратура комплекса, состоящего из СРМ и СРП, на уровне укрупненных блоков показана на чертеже. Аппаратура содержит приемную антенну СРМ (блок 1), радиоприемное устройство СРМ (блок 2), процессор цифровой обработки сигнала (ПЦОС) СРМ (блок 3), устройство формирования излучаемого сигнала СРП (блок 4), радиопередающее устройство СРП (блок 5), передающую антенну (блок 6), синхронизатор (блок 7).
Таким образом, СРМ и СРП в совокупности уже имеют в своем составе те же основные функциональные блоки, из которых традиционно состоит активная РЛС. Однако, все эти блоки по своим параметрам настроены и оптимизированы лишь для режимов радиомониторинга и радиопротиводействия, но не настроены для применения в режиме РЛС.
Аппаратура современных СРМ и СРП строится по принципу программно определяемых радиосистем, или Software-defined radio (SDR). Программное обеспечение SDR позволяет программно устанавливать или изменять рабочие радиочастотные параметры радиоприемных и радиопередающих устройств, а также устройств обработки или формирования радиосигнала. К таким параметрам могут относится, в частности, диапазон рабочих частот, тип модуляции, выходная мощность сигнала, а также алгоритмы и параметры цифровой обработки сигнала. SDR обычно выполняет значительную часть цифровой обработки сигналов на универсальных вычислительных средствах, например, обычном компьютере или процессоре, или на ПЛИС, что позволяет программным образом выполнять переконфигурацию радиотехнической системы. Таким образом, блоки аппаратуры СРМ и СРП в принципе могут быть переконфигурированы для работы в режиме радиолокации.
Отдельные блоки станций (СРМ и СРП) могут изначально обладать параметрами, не оптимальными с точки зрения радиолокации. Прежде всего это относится к антеннам, которые у СРМ и СРП, как правило, обладают худшими характеристиками направленности, чем специальные антенны РЛС. Например, ожидаемая разница в коэффициенте усиления как приемной, так и предающей антенны по сравнению с антенной специальной РЛС может составить приблизительно 14-15 дБ, что приведет к уменьшению дальности обнаружения цели комплексом СРМ и СРП по сравнению со специальной твердотельной РЛС приблизительно в 7-7,5 раз, т.е. до типовой величины порядка 1-1,5 км. Но и такой достигнутой дальности обнаружения может быть достаточно, чтобы объективно отследить реакцию БВС на помеховое воздействие комплекса в непосредственной близости от охраняемого объекта или территории. Таким образом, исходная неоптимальность аппаратуры СРМ и СРП для режимов радиолокации не может препятствовать реализуемости этого режима. При этом нужно подчеркнуть, что в комплексе СРМ и СРП в режим радиолокации является вспомогательными по отношению к основному режиму противодействия БВС, реализуемому в комплексе, и в целом не предназначен для самостоятельного применения.
В известном способе радиопротиводействия БВС, принятом за прототип, основные режимы комплекса - режим радиомониторинга и режим радиопротиводействия выполняются циклически в последовательных временных интервалах, т.к. прием сигнала невозможно производить одновременно с постановкой помехи. Поэтому комплекс прототипа работает последовательно в двух временных интервалах.
На первом временном интервале в режиме радиомониторинга выполняют следующие операции:
• принимают радиосигнал, излучаемый аппаратурой БВС;
• вычисляют спектр сигнала, излучаемого аппаратурой БВС;
• определяют направление на источник сигнала;
• распознают тип сигнала;
• определяют параметры сигнала, необходимые для формирования сигнала эффективного радиопротиводействия;
• передают эти параметры сигнала на СРП.
На втором временном интервале в режиме радиопротиводействия выполняют следующие операции:
• формируют помеховый сигнал с выбранными параметрами;
• излучают помеховый сигнал в направлении БВС.
В предлагаемом в настоящем изобретении способе в этом цикле предлагается ввести дополнительный временной интервал для режима радиолокационного обнаружения цели и измерения дальности. Для этого нужно на новом временном интервале переконфигурировать аппаратурные блоки для работы в этом режиме, что позволяет сделать технология SDR, а затем последовательно выполнить операции радиолокационного обнаружения цели и измерения дальности:
• СРМ переключают в режим приема и обработки радиолокационного сигнала;
• СРП переключают в режим формирования и излучения зондирующего радиолокационного сигнала;
• формируют зондирующий радиолокационный сигнал;
• излучают этот сигнал в направлении БВС;
• с помощью СРМ принимают отраженный от БВС сигнал;
• с помощью ПЦОС СРМ осуществляют обработку сигнала;
• определяют задержку принятого сигнала относительно зондирующего сигнала СРП;
• по определенной задержке вычисляют дальность до БВС;
• переключают СРМ в режим радиомониторинга;
• переключают СРП в режим радиопротиводействия.
Операции переключения между режимами аппаратуры являются технологическими и выполняются с помощью технологии SDR, а остальные операции являются известными операциями радиолокационного способа обнаружения и измерения дальности цели. Радиотехнические системы, у которых в аппаратуре последовательно реализуются разные режимы также известны. Например, в самолетных многофункциональных РЛС с АФАР могут быть реализованы как режим радиолокационного обнаружения, так и режим постановки помех. Однако, в известных источниках информации не удалось найти примеры реализации предлагаемого способа с помощью ранее не предназначенной к этому аппаратуры СРМ и СРП. Поэтому предлагаемый способ является новым.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ УВОДЯЩИХ ПО ДАЛЬНОСТИ ПОМЕХ С ИСПОЛЬЗОВАНИЕМ СТАНЦИИ АКТИВНЫХ ПОМЕХ | 2007 |
|
RU2335783C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса "воздух-воздух" с радиолокационной головкой самонаведения | 2021 |
|
RU2799492C2 |
| СТАНЦИЯ АКТИВНЫХ ПОМЕХ | 1979 |
|
SU1840986A1 |
| СТАНЦИЯ АКТИВНЫХ ПОМЕХ | 2010 |
|
RU2446414C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2002 |
|
RU2237907C2 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
Изобретение относится к области противодействия беспилотным воздушным судам (БВС) и может быть использовано в простых по аппаратному составу системах, состоящих из станций радиомониторинга (СРМ) и станций радиопротиводействия (СРП). Техническим результатом является создание способа обнаружения и оценки дальности радиоизлучающих и радиомолчащих БВС, который позволяет на небольших дальностях без использования РЛС или дальномера выполнять эффективное радиопротиводействие БВС. В заявленном способе осуществляют работу аппаратурных блоков СРМ и СРП с помощью технологии SDR, что позволяет дополнительно к режиму радиомониторинга и режиму постановки помех реализовать режим измерения дальности до БВС в ближней зоне в выделенном временном интервале. На СРМ в режиме радиомониторинга принимают радиосигнал, излучаемый аппаратурой БВС, определяют направление на источник сигнала, определяют тип и параметры сигнала, передают их на СРП. На СРП в режиме радиопротиводействия формируют помеховый сигнал с выбранными параметрами. При этом дополнительно аппаратуру СРМ переконфигурируют на режим обработки радиолокационного сигнала, аппаратуру СРП переконфигурируют в режим формирования зондирующего радиолокационного сигнала. С помощью антенны и радиопередающего устройства СРП излучают зондирующий радиосигнал в направлении БВС, с помощью антенны и радиоприемного устройства СРМ принимают отраженный от БВС сигнал. В процессоре цифровой обработки сигнала СРМ определяют задержку принятого сигнала относительно зондирующего, по которой определяют дальность до БВС. Затем аппаратуру СРМ переконфигурируют на режим радиомониторинга, а аппаратуру СПР – на режим радиопротиводействия. 1 ил.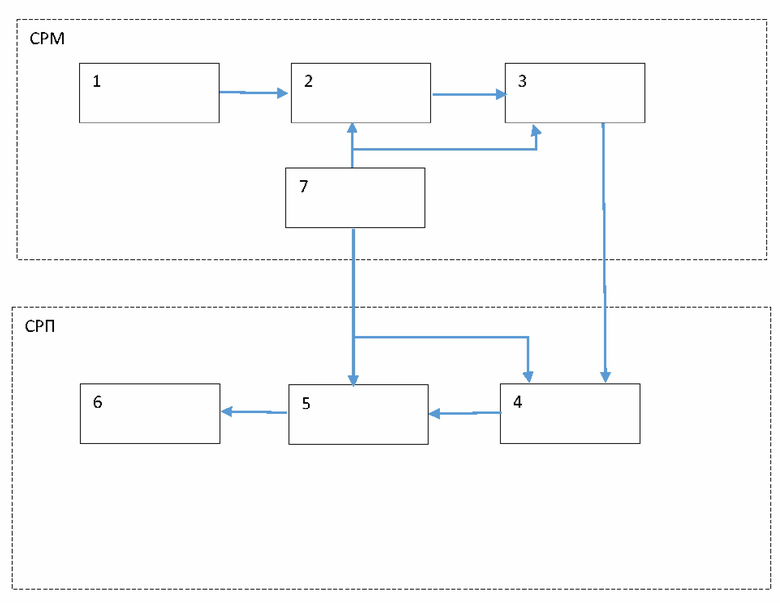
Способ радиопротиводействия беспилотному воздушному судну (БВС), реализуемый в комплексе аппаратуры станции радиомониторинга (СРМ) и станции радиопротиводействия (СРП), при котором на СРМ в режиме радиомониторинга принимают радиосигнал, излучаемый аппаратурой БВС, вычисляют спектр этого сигнала, определяют направление на источник сигнала, распознают тип сигнала, определяют параметры сигнала, необходимые для формирования сигнала эффективного радиопротиводействия, передают эти параметры на СРП, на СРП в режиме радиопротиводействия формируют помеховый сигнал с выбранными параметрами и излучают этот сигнал в направлении БВС, отличающийся тем, что с помощью технологии SDR дополнительно выполняют следующие операции: аппаратуру СРМ переконфигурируют на режим обработки радиолокационного сигнала, аппаратуру СРП переконфигурируют в режим формирования зондирующего радиолокационного сигнала, с помощью антенны и радиопередающего устройства СРП излучают сформированный зондирующий радиосигнал в направлении БВС, с помощью антенны и радиоприемного устройства СРМ принимают отраженный от БВС сигнал, в процессоре цифровой обработки сигнала СРМ определяют задержку принятого сигнала относительно зондирующего, по вычисленной задержке определяют дальность до БВС, аппаратуру СРМ переконфигурируют на режим радиомониторинга, аппаратуру СПР переконфигурируют на режим радиопротиводействия.
| Система обнаружения и противодействия беспилотным воздушным судам | 2023 |
|
RU2809997C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Комплекс радиоэлектронной борьбы с беспилотными летательными аппаратами | 2018 |
|
RU2685509C1 |
| МАШИНА ДЛЯ ПОСАДКИ ЛУКА Т. МЕЛИНЕВСКОГО | 1967 |
|
SU223490A1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ, СОВЕРШАЮЩИМ ПЕРЕДАЧУ ИНФОРМАЦИИ НА НАЗЕМНЫЙ ПУНКТ ПРИЕМА | 2023 |
|
RU2819415C1 |
| Мобильный комплекс противодействия БПЛА "Защита", АО "НИИ "ВЕКТОР" [электронный ресурс: https://web.archive.org/web/20220517231226/https://nii-vektor.ru/mobilnyj-kompleks-protivodejstviya-bpla-zashhita-2/, | |||

