Изобретение относится к области радиолокации и может быть использовано для создания зон защиты от низколетящих беспилотных летательных аппаратов (БПЛА).
Известен радиолокационный способ обнаружения малых БПЛА по средствам измерения скорости частиц акустических волн, испускаемых вращающимися пропеллерами БПЛА с использованием эффекта Доплера [RU № 2735070, опубл. 27.10.2020].
Недостатком этого способа является чрезвычайно малая эффективная поверхность рассеивания (ЭПР) частиц акустических волн и большая мощность передатчика РЛС.
Известно многоканальное устройство обнаружения малогабаритных БПЛА и способ визуально-оптического контроля путем лазерного сканирования атмосферы [RU № 2489732, опубл. 10.08.2013], включающий подсветку атмосферы лазерным излучением, прием отраженного излучения и использование вычислительной системы.
Недостатком является активный метод обнаружения и минимальные турбулентные потоки из-за малых размеров.
Известен способ радиолокации малых БПЛА на основе регистрации частот вращения винтов [RU № 2622908, опубл. 21.06.2017]. Этот способ может быть использован для создания зон защиты от низколетящих БПЛА, однако он не позволяет определять координаты целей.
Известен способ радиолокации с пространственной модуляцией сигналов [RU № 2797828, опубл. 08.06.2023], позволяющий измерять дальность до цели фазоразностным методом на частоте коммутации диаграммы направленности антенны.
Недостатком его является неоднозначность определения дальности при появлении группы целей на одном азимуте.
Технический результат заявляемого изобретения заключается в обнаружении низколетящих БПЛА на высотах менее 100 м на дальности до 5 км, задача, не решаемая имеющимися на вооружении радиолокационными станциями.
Для достижения технического результата в способе создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов, заключающимся в радиолокационном облучении местности путем сканирования лучами антенны радиолокационной станции (РЛС) с борта квадрокоптера-носителя, поднятых над землей на высоту прямой видимости целей над неровной поверхностью, установке вдоль зоны защиты нескольких квадрокоптеров-носителей, образующих на поверхности земли сплошную зону обнаружения, новым является то, что на каждом квадрокоптере-носителе устанавливают радиолокаторы с периодической коммутацией плоскости поляризации радиоволн, сканируют местность лучами фазированной антенной решетки, расстояние до цели определяют по разности фаз сигналов опорной частоты коммутации и принятых после амплитудной демодуляции радиосигналов. При этом, после обнаружения одного или группы БПЛА противника, к передатчику кодированных сигналов радиоэлектронной борьбы (РЭБ) подключают специальную антенну для радиоподавления систем для управления обнаруженных БПЛА противника или дают сигнал артиллерийским средствам их уничтожения. При этом, ориентацию квадрокоптера-носителя ведут путем установки на земле угловых отражателей, на квадрокоптере-носителе устанавливают четыре разнесенные между собой вибратора, формирующих равносигнальную зону излучения, а высоту подвеса определяют фазоразностным методом на частоте коммутации. При этом, азимутальную ориентацию квадрокоптера-носителя ведут с помощью магнитного или гиромагнитного компаса. При этом, подзарядку бортовых аккумуляторов квадрокоптера-носителя и передачу данных ведут по витой паре проводов, соединяющих квадрокоптер-носитель и наземный пункт управления, либо меняют периодически аккумуляторы. При этом, в качестве привода винтов квадрокоптера-носителя устанавливает турбовинтовые двигатели.
Изобретение поясняется чертежами.
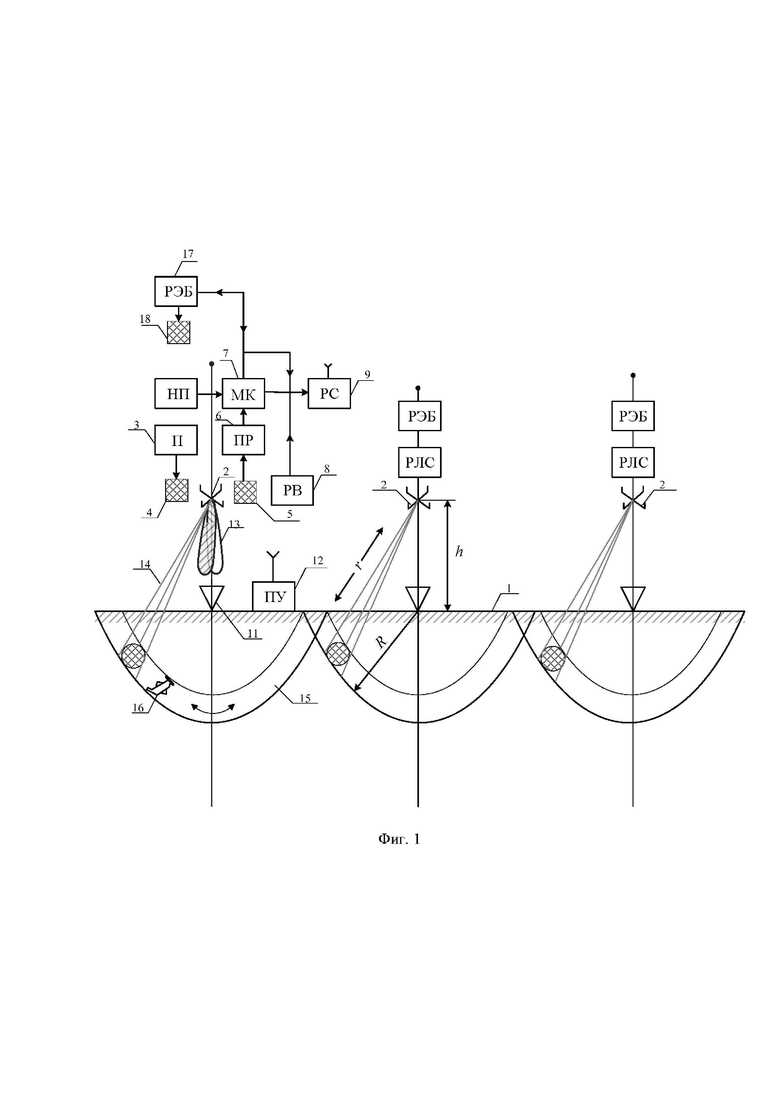
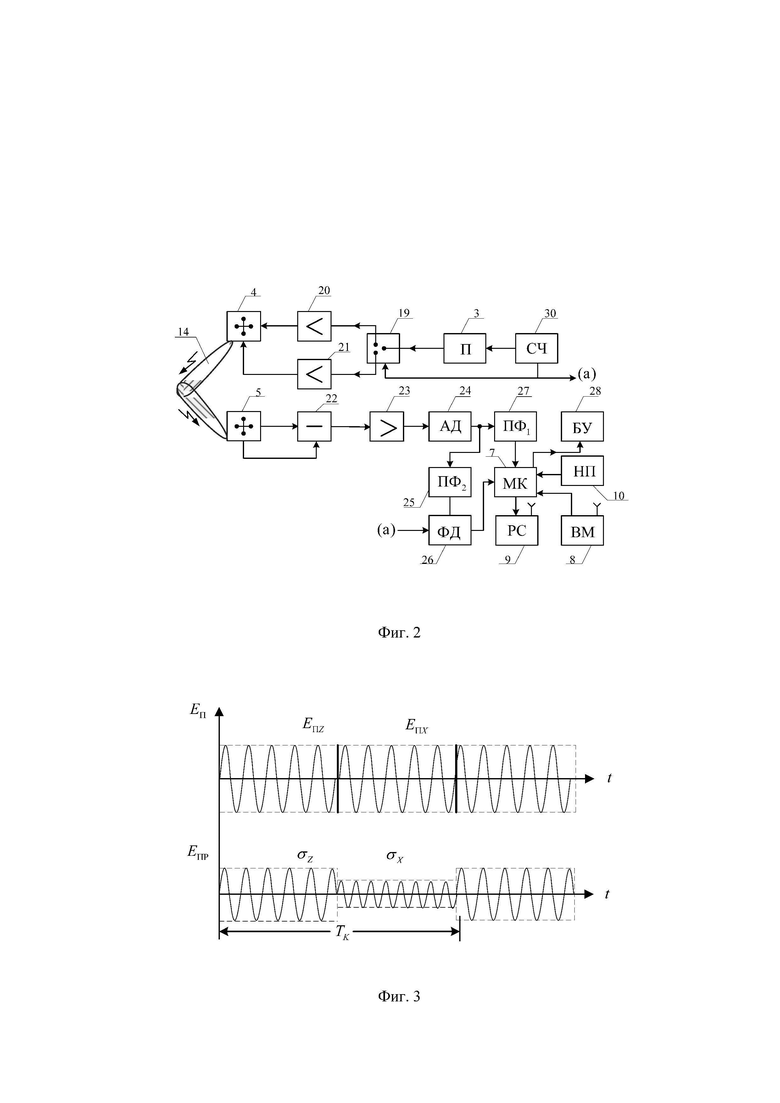
На фиг. 1 показана структурная схема зоны защиты территорий. На фиг. 2 приведена структурная схема бортового радиолокатора. На фиг. 3 показаны эпюры сигналов передатчика Еп и приемника Епр.
Фиг. 1 включает в себя: 1 - поверхность земли; 2 - квадрокоптер-носитель РЛС; 3 - передатчик РЛС; 4, 5 - бортовые фазированные антенные решетки (ФАР); 6 - приемник; 7 - микроконтроллер; 9 - бортовая радиостанция связи; 11 - угловые отражатели; 12 - наземная радиостанция оператора пульта управления (ПУ); 13 - равносигнальная зона радиовысотомера; 14 - диаграмма направленности РЛС; 15 - зона обнаружения; 16 - дрон-нарушитель; 17 - передатчик РЭБ; 18 - антенна РЭБ.
Фиг. 2 включает в себя: 3 - передатчик; 4 - передающая ФАР; 5 - приемная ФАР; 7 - микроконтроллер; 8 - высотомер; 9 - радиостанция связи; 10 - навигационный приемник «Глонасс» GPS; 14 - диаграмма направленности РЛС; 19 - коммутатор; 20, 21 - усилители мощности; 22 - приемник; 23 - амплитудный детектор; 24 - полосовой фильтр; 26 - фазовый детектор; 27 - полосовой фильтр частоты вращения винтов БПЛА; 28 - блок управления ФАР; 30 - синтезатор частот.
Фиг. 3 показывает эпюры излучаемых и принимаемых сигналов во времени с напряженностями поля Ex, Ey, в том числе для высотомера, где: T - период коммутации, определяемый из условия, что бы длина волны частоты коммутации не менее чем в два раза превышала максимальную дальность до цели.

Способ работает следующим образом.
Оператор пульта управления (ПУ) устанавливает на точке наблюдения угловые отражатели 11 и своей командой поднимает квадрокоптер-носитель, по показаниям радиовысотомера 8 на высоту порядка 100-200 м или другую. После этого через радиостанцию 12 оператор ПУ включает в работу бортовую радиолокационную станцию квадрокоптера-носителя, которая начинает сканировать своим лучом 14 поверхность земли по азимуту с помощью своих ФАР 4, 5. При попадании БПЛА противника в зону обнаружения, микроконтроллер 7, по сигналу пульта управления, включает систему радиоэлектронной борьбы РЭБ.
Бортовой микроконтроллер вычисляет расстояние до цели с помощью фазоразностных измерений по сигналам опорной частоты коммутации Fк, генерируемых синтезатором и поступившими сигналами с амплитудного демодулятора 24 (Фиг. 2). Частота работы коммутатора определяется по (1).
Такое условие позволяет избежать неоднозначность при определении расстояния до цели методом измерения разности фаз между принятым сигналом частоты коммутации Fк опорным, определяемым синтезатором частоты 30.
Принятые радиосигналы, отраженные от цели, поступают на вычитающее устройство 22 (ВУ). При этом радиосигналы вибраторов, поляризации Ex, поступают на ВУ через управляемый фазовращатель, что позволяет производить начальную компенсацию радиосигналов передатчика от попадания на вход приемного тракта.
С выхода ВУ отраженные радиосигналы поляризации Ex, Ey, через амплитудный детектор 24 и полосовой фильтр 27 настроенный на частоты вращения винтов БПЛА, поступают на микроконтроллер 7, а через фильтр частоты коммутации 28, поступают на фазовый детектор 25, сигналы которого подаются для цифровой обработки на микроконтроллер 7, определяющий дальность до цели.
Коммутация поляризаций диаграммы направленности ФАР модулирует отраженные от цели радиосигналы по амплитуде. Эффективная поверхность рассеивания (ЭПР) целей σx, σy по осям X и Y не является одинаковыми в силу неизометричности облучения их винтов. Коэффициент модуляции определяется как:

Отраженный от цели радиосигнал описывается формулой:

Здесь ωн и Ωк соответственно радиальные частоты несущей f и коммутации Fк.
Частота вращения винта выделяется фильтром 27. Дальность до цели оценивается по разности фаз сигналов излучаемой и принимаемой частот коммутации:

Азимут определяется сканированным антенных лучей.
После амплитудной демодуляции сигнала в приемнике РЛС с помощью полосового фильтра 25 выделяется сигнал частоты коммутации, фаза которого относительно опорной частоты несет информацию о дальности:

Откуда 
Частота коммутация определяется из условия  или
или 
Так при r = 5000 м;  кГц. Точность измерения расстояния оценивается погрешностью фазометра Δϕ:
кГц. Точность измерения расстояния оценивается погрешностью фазометра Δϕ:

Если принять Fк = 30000 Гц, то при погрешности фазометра в один градус, измеряющего до цели, из (7) получим:

Современная цифровая фазометрия позволяет оценить фазовый сдвиг с погрешностью до 0.1°, тем самым повысить точность измерения расстояния до 3 м.
Из уравнения дальности мощность радиосигнала на выходе приемной антенны оценивается как:

Здесь SA - эффективная площадь ФАР,  - коэффициент направленности действия ФАР. Откуда требуемая мощность излучения передатчика РЛС:
- коэффициент направленности действия ФАР. Откуда требуемая мощность излучения передатчика РЛС:

Здесь: q - требуемое отношение сигнал/шум на входе приемника; λ - длина волны; PШ = kTk0Δf - мощность шума; Tk0 - температура приемника в градусах Кельвина; Δf - полоса пропускания, определяемая спектром частоты вращения винтов БПЛА.
При следующих частных значениях параметров РЛС: q = 10; k = 1.38 ⋅ 10-23; Tk0 = 300°; Δf = 1000 Гц; m = 0.5; σy = 0.01 м2; SA = 0.1 м2; Δf = 104 Гц; Q = 1400; из (11), получим PП = 1.6 вт.
Конструкция ФАР отличается тем, что каждый элемент ее состоит из двух ортогональных вибраторов, обеспечивающих поляризацию излучаемых радиоволн Ex и Ez.
Количество элементов ФАР на заданной площади SA = 0.1 м2 оценивается как:  .
.
При этом на каждой элемент n = 100 тепловая мощность нагрева составляет 16 мвт.
Это существенно снижает требование к тепловой защите элементов ФАР. Для исключения наложения частот вращения винтов квадрокоптера-носителя на радиосигнал, предложено его электродвигатели заменить на турбовинтовые, исключающие их влияние на радиосигналы.
По численным оценкам, для обеспечения подавления управления БПЛА, по сигналам навигационной системы GPS уровнем - 155 дБ/Вт, потребуется шумовая помеха мощностью - 110 дБ/Вт, которую можно создать бортовым передатчиком РЭБ, с ненаправленной антенной, мощностью 0.2 Вт, что вполне укладывается в энергетику квадрокоптера-носителя.
Преимущества заявленного изобретения заключаются в следующем:
- Узкая полоса пропускания приемника в десятки тысяч раз ниже чем у традиционных, применяемых во всем мире РЛС, что позволяет существенно снизить мощность передатчика; уменьшить площадь бортовой антенны и массу всей аппаратурно размещаемой на квадрокоптере-носителе; повысить помехозащищенность и скрытность работы РЛС.
- Измерение дальности на частоте коммутации сигнала существенно увеличивает точность измерения расстояния до цели.
- Установка цели РЛС вдоль линии защиты или вокруг защищаемой зоны городов и поселков гарантирует их безопасность.
- В связи с небольшой стоимостью РЛС возможна быстрая организация их серийного производства.
- Возможна установка радиолокационных точек наблюдения на крышах высотных домов, трубах и т.п., находящихся на периферии населенных пунктов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ, УПРАВЛЯЕМЫМ ПО РАДИОКАНАЛУ | 2023 |
|
RU2821809C1 |
| Имитационно-испытательный комплекс полунатурного тестирования радиолокационной станции | 2019 |
|
RU2715060C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ, СОВЕРШАЮЩИМ ПЕРЕДАЧУ ИНФОРМАЦИИ НА НАЗЕМНЫЙ ПУНКТ ПРИЕМА | 2023 |
|
RU2819415C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
Изобретение относится к способу создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов. Для создания зоны защиты производят радиолокационное облучение местности путем сканирования лучами антенны радиолокационной станции (РЛС) с борта квадрокоптеров-носителей, поднятых над землей на высоту прямой видимости целей над неровной поверхностью для организации на поверхности земли сплошной зоны обнаружения. На каждом из квадрокоптеров устанавливают радиолокаторы с периодической коммутацией плоскости поляризации радиоволн, сканируют местность лучами фазированной антенной решетки, определяют расстояние до цели по разности фаз сигналов опорной частоты коммутации и принятых после амплитудной демодуляции радиосигналов. Обеспечивается возможность обнаружения низколетящих беспилотных летательных аппаратов на высотах менее 100 м на дальности до 5 км. 3 з.п. ф-лы, 3 ил.
1. Способ обнаружения низколетящих беспилотных летательных аппаратов противника (БПЛА) над защищаемой территорией, заключающийся в том, что вдоль зоны защиты над неровной поверхностью поднимают на высоту прямой видимости целей квадрокоптеры-носители, оснащенные бортовыми радиолокационными станциями (РЛС), количество которых определяется необходимой зоной защиты, отличающийся тем, что местность сканируют лучами фазированной антенной решётки с коммутацией плоскости поляризации излучаемых радиоволн, определяют расстояние до цели по разности фаз сигналов опорной частоты коммутации и принятых после амплитудной демодуляции радиосигналов, при этом ориентацию квадрокоптера-носителя ведут путем установки на земле угловых отражателей, а на квадрокоптер-носитель устанавливают четыре разнесенные между собой вибратора, формирующие равносигнальную зону излучения, высоту подвеса определяют фазоразностным методом на частоте коммутации диаграммы направленности, а азимутальную ориентацию квадрокоптера-носителя ведут с помощью магнитного или гидромагнитного компаса.
2. Способ по п. 1, отличающийся тем, что после обнаружения одного или группы БПЛА противника, к передатчику кодированных сигналов радиоэлектронной борьбы (РЭБ) подключают специальную антенну для радиоподавления систем управления обнаруженных БПЛА противника или дают сигнал артиллерийским средствам для их уничтожения.
3. Способ по п. 1, отличающийся тем, что подзарядку бортовых аккумуляторов квадрокоптера-носителя и передачу данных ведут по витой паре проводов, соединяющих квадрокоптер-носитель и наземный пункт управления, либо меняют периодически аккумуляторы.
4. Способ по п. 1, отличающийся тем, что в качестве привода винтов квадрокоптера-носителя устанавливает турбовинтовые двигатели.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| WO 2017178687 A1, 19.10.2017 | |||
| US 11156707 B2, 26.10.2021 | |||
| US 20200158822 A1, 21.05.2020. | |||
