Изобретение относится к системам регулирования движения транспорта, а именно к глобальным системам управления движением, и может быть использовано для совместного обеспечения группой стран безопасного движения транспортных средств (ТС) на всех этапах управления их движением.
Известен способ управления движением транспортных средств (US 8538673), в котором на станции управления принимают навигационную информацию извне; на ТС определяют их текущие координаты, и передают их на станцию управления; на станции управления определяют рекомендуемые маршруты ТС, и передают их на соответствующие ТС.
Наиболее близким к предлагаемому является способ управления движением транспортных средств (RU 2746058 С1), в котором на станциях управления принимают навигационную информацию извне; на ТС определяют их текущие координаты и желаемые маршруты, и передают их на станции управления, в зонах ответственности которых они находятся; на станциях управления определяют рекомендуемые маршруты ТС, находящихся в их зонах ответственности.
Однако в известных способах безопасные траектории движения ТС по рекомендуемым маршрутам рассчитывают на станции управления, что снижает точность расчетов в связи с удаленностью станции управления от ТС. При этом, глобальная спутниковая система навигации не работает в зонах применения средств радиоэлектронной борьбы, что снижает точность определения координат ТС с помощью бортовых инерциальных систем навигации, а в известных способах эти координаты не корректируют. Кроме того, в известных способах не осуществляют поиск посторонних объектов, с которыми могут столкнуться ТС, а также не обеспечивают возможность взаимодействия систем, принадлежащих странам со своими зонами ответственности.
Указанные недостатки известных способов приводят к снижению безопасности движения ТС.
Цель изобретения - повышение безопасности движения ТС.
Предложенный способ заключается в том, что:
- на станциях управления принимают навигационную информацию извне, и передают ее на ТС, находящиеся в их зонах ответственности;
- на станциях управления рассчитывают точные текущие координаты обнаруженных объектов, и передают их на соответствующие станции поиска;
- на станциях поиска обнаруживают ранее обнаруженные и новые объекты, определяют координаты, скорости и размеры обнаруженных объектов, и передают их на соответствующие станции управления;
- на станциях управления рассчитывают точные текущие координаты ТС, и передают их на соответствующие станции поиска;
- на станциях поиска определяют координаты и скорости ТС, и передают их на соответствующие станции управления;
- со станций управления передают данные ТС и обнаруженных объектов, принятые от станций поиска, на остальные станции управления;
- на ТС определяют их текущие координаты и желаемые маршруты, и передают их на станции управления, в зонах ответственности которых они находятся;
- на станциях управления рассчитывают текущие ошибки определения координат на ТС, находящихся в их зонах ответственности, и передают их на соответствующие ТС для корректировки;
- на станциях управления определяют рекомендуемые маршруты ТС, которые находятся в их зонах ответственности, и передают их на соответствующие ТС;
- на станциях управления определяют ТС и обнаруженные объекты, которые находятся перед каждым ТС, находящимся в их зонах ответственности, и передают их координаты, скорости и размеры на соответствующие ТС для расчета безопасных траекторий движения ТС по рекомендуемым маршрутам.
ТС могут быть надводными, воздушными или космическими, а станции поиска - радиолокационными, телевизионными, лазерными или комбинированными (US 10453351). С ТС передают их характеристики на станции управления, в зонах ответственности которых они находятся.
На станциях управления принимают извне и передают на ТС навигационную информацию, которая содержит цифровые карты местности, а также координаты и размеры опасных и запретных зон. На станциях управления, благодаря обмену между ними данными ТС и обнаруженных объектов, формируют одинаковые базы данных, для анализа которых используют одинаковые алгоритмы, и получают одинаковые результаты.
На станциях управления координаты ТС и обнаруженных объектов рассчитывают на основании их координат и скоростей, принятых со станций поиска на всех станциях управления в предыдущем цикле, и моментов времени их определения на станциях поиска. Со станций управления координаты ТС и обнаруженных объектов передают на станции поиска, в секторах обзора которых они находятся.
На станциях управления различают ранее обнаруженные и новые объекты путем сравнения их координат, принятых со станций поиска, с координатами объектов, переданными на станции поиска.
На ТС определяют их координаты с помощью бортовых инерциальных систем навигации, корректируемых с помощью глобальной спутниковой системы навигации, а желаемые маршруты - с помощью пилотов или автопилотов.
На станциях управления рекомендуемые маршруты ТС определяют, исходя из необходимости предотвращения их опасного сближения с объектами и остальными ТС, а также из необходимости обхода ими опасных и запретных зон.
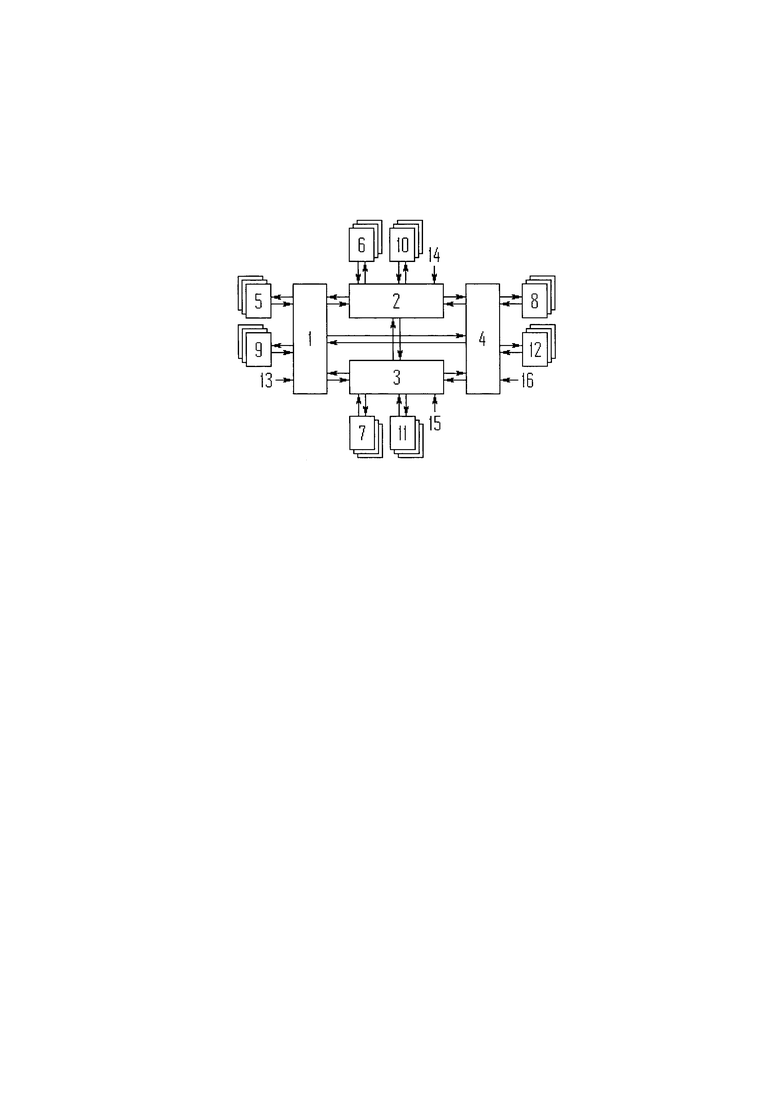
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1, 2, 3, 4 - станции управления; 5, 6, 7, 8 - группы станций поиска; 9, 10, 11, 12 - группы ТС.
Связи между блоками: 1-2, 1-3, 1-4, 2-1, 2-3, 2-4, 3-1, 3-2, 3-4, 4-1, 4-2, 4-3 - данные ТС и обнаруженных объектов, принятые со станций поиска; 1-5, 2-6, 3-7, 4-8 - точные текущие координаты ТС и обнаруженных объектов; 1-9, 2-10, 3-11, 4-12 - навигационная информация, текущие ошибки определения координат на ТС, рекомендуемые маршруты ТС, а также координаты, скорости и размеры ТС и обнаруженных объектов, которые находятся перед каждым ТС; 5-1, 6-2, 7-3, 8-4 - координаты, скорости и размеры обнаруженных объектов, а также координаты и скорости ТС; 9-1, 10-2, 11-3, 12-4 - текущие координаты и желаемые маршруты ТС; 13-1, 14-2, 15-3, 16-4 - навигационная информация.
Изобретение относится к системам регулирования движения транспорта, а именно к глобальным системам управления движением. На станциях управления принимают навигационную информацию извне и передают ее на транспортные средства (ТС), а также рассчитывают координаты обнаруженных объектов и передают их на станции поиска, где определяют координаты, скорости и размеры обнаруженных объектов и передают их на станции управления, где рассчитывают координаты ТС и передают их на станции поиска, где определяют координаты и скорости ТС и передают их на станции управления. Со станции управления передают данные ТС и обнаруженных объектов на остальные станции управления. На ТС определяют их координаты и желаемые маршруты и передают их на станции управления, где рассчитывают ошибки определения координат на ТС и передают их на ТС для корректировки. На станциях управления определяют рекомендуемые маршруты ТС и передают их на ТС, а также определяют ТС и обнаруженные объекты перед каждым ТС и передают их координаты, скорости и размеры на ТС для расчета траекторий их движения по рекомендуемым маршрутам. Повышается безопасность движения ТС. 1 ил.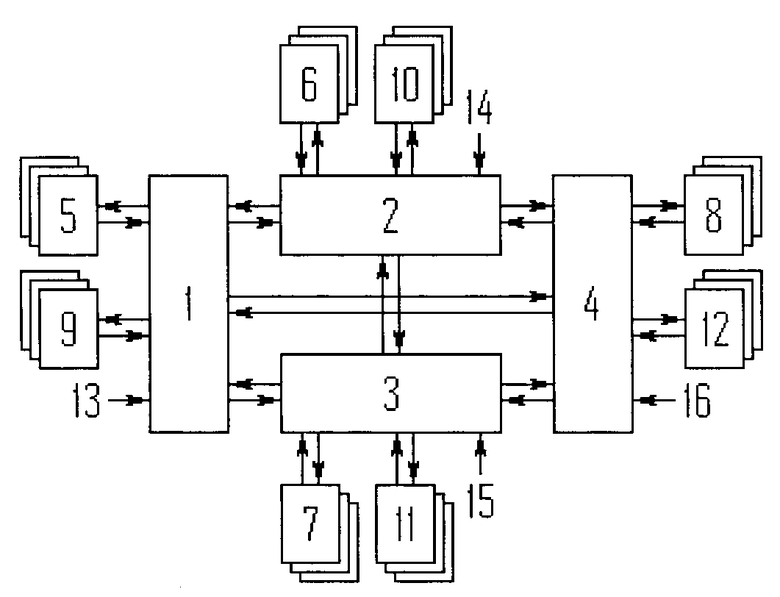
Способ совместного управления движением транспортных средств, заключающийся в том, что на станциях управления принимают навигационную информацию извне; на транспортных средствах (ТС) определяют их текущие координаты и желаемые маршруты и передают их на станции управления, в зонах ответственности которых они находятся; на станциях управления определяют рекомендуемые маршруты ТС, находящихся в их зонах ответственности; отличающийся тем, что со станций управления передают навигационную информацию на ТС, находящиеся в их зонах ответственности; на станциях управления рассчитывают точные текущие координаты обнаруженных объектов и передают их на соответствующие станции поиска; на станциях поиска обнаруживают ранее обнаруженные и новые объекты, определяют координаты, скорости и размеры обнаруженных объектов и передают их на соответствующие станции управления; на станциях управления рассчитывают точные текущие координаты ТС и передают их на соответствующие станции поиска; на станциях поиска определяют координаты и скорости ТС и передают их на соответствующие станции управления; со станций управления передают данные ТС и обнаруженных объектов, принятые от станций поиска, на остальные станции управления; на станциях управления рассчитывают текущие ошибки определения координат на ТС, находящихся в их зонах ответственности, и передают их на соответствующие ТС для корректировки; со станций управления передают рекомендуемые маршруты ТС, находящихся в их зонах ответственности, на соответствующие ТС; на станциях управления определяют ТС и обнаруженные объекты, которые находятся перед каждым ТС, находящимся в их зонах ответственности, и передают их координаты, скорости и размеры на соответствующие ТС для расчета безопасных траекторий движения ТС по рекомендуемым маршрутам.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2683584C1 |
| US 8538673 B2, 17.09.2013. | |||

