Изобретение относится к системам управления движением, а именно к бортовым системам предотвращения столкновений транспортных средств с объектами, и может быть использовано для обеспечения безопасного движения транспортных средств на всех этапах управления их движением.
Известен способ предотвращения опасного сближения транспортного средства (ТС) с объектами (RU 2664090 С1), в котором определяют текущие координаты, скорость и угловое положение ТС; рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами; принимают внешние сигналы управления движением ТС и передают их в его систему управления.
Однако, в таком способе не обеспечивают возможность предотвращения опасного сближения ТС с подвижными объектами, а также используют цифровую карту местности, которая может не соответствовать действительности.
Известен способ предотвращения опасного сближения ТС с объектами (RU 2513198 С2), в котором определяют текущие координаты, скорость и угловое положение ТС; сканируют пространство в пределах телесного угла, и в каждом направлении сканирования определяют текущую дальность объектов относительно ТС; рассчитывают текущие координаты объектов относительно ТС; рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами.
Однако, в таком способе не определяют текущие скорости подвижных объектов, что снижает точность расчета их текущих координат.
Наиболее близким к предлагаемому является способ предотвращения опасного сближения ТС с объектами (RU 2018119138 А), в котором определяют текущие координаты, скорость и угловое положение ТС; сканируют пространство в пределах телесного угла, и в каждом направлении сканирования определяют текущие дальность и радиальную скорость объектов относительно ТС; обнаруживают подвижные объекты и рассчитывают их текущие координаты относительно ТС; сопровождают подвижные объекты и определяют их текущие скорости; прогнозируют траектории движения подвижных объектов, и рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами.
Однако, в таком способе не обеспечивают возможность предотвращения опасного сближения ТС с наземными объектами.
Кроме того, в известных способах используют глобальную спутниковую систему навигации, которая не работает в зонах применения средств радиоэлектронной борьбы, что снижает точность определения координат ТС с помощью бортовой инерциальной системы навигации. А также, в них не обеспечивают возможность предотвращения столкновений ТС с объектами в случае его захвата террористами. Указанные недостатки известных способов снижают вероятность предотвращения опасного сближения ТС с объектами.
Цель изобретения - повышение вероятности предотвращения опасного сближения ТС с объектами.
Предложенный способ заключается в том, что:
- определяют текущие координаты, скорость и угловое положение ТС;
- сканируют пространство в пределах телесного угла, текущее направление оси которого совпадает с текущим направлением вектора скорости ТС, и в каждом направлении сканирования определяют текущие дальность и радиальную скорость объектов относительно ТС;
- обнаруживают подвижные объекты и рассчитывают их текущие координаты относительно ТС;
- сопровождают подвижные объекты и определяют их текущие скорости;
- рассчитывают координаты объектов, находившихся в пределах телесного угла в предыдущем цикле сканирования, относительно ТС в начале следующего цикла сканирования;
- принимают внешние сигналы управления движением ТС;
- прогнозируют координаты, скорость и угловое положение ТС при передаче внешних сигналов управления движением ТС в его систему управления, а также координаты объектов, находившихся в пределах телесного угла в предыдущем цикле сканирования, относительно ТС в прогнозируемый момент времени;
- прогнозируют траектории движения подвижных объектов, и рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами при передаче внешних сигналов управления движением ТС в его систему управления;
- передают внешние сигналы управления движением ТС в его систему управления при наличии указанных траекторий движения ТС;
- рассчитывают коррекцию внешних сигналов управления движением ТС, необходимую для предотвращения его опасного сближения с объектами, при отсутствии указанных траекторий движения ТС;
- корректируют внешние сигналы управления движением ТС и передают их в его систему управления.
ТС может быть воздушным, надводным или подводным. Текущие координаты, скорость и угловое положение ТС определяют с помощью бортовой инерциальной системы навигации. В случае надводного ТС, телесный угол сканирования состоит из надводной и подводной частей. Сканирование надводной части телесного угла осуществляют с помощью фазированной антенной решетки, а подводной части - с помощью гидролокатора с широким сектором обзора. Сопровождение подвижных объектов в надводной части телесного угла осуществляют с помощью фазированной антенной решетки одновременно, а в подводной части - с помощью гидролокатора с узким сектором обзора по очереди. Сбор информации об объектах в надводной и подводной частях телесного угла осуществляют раздельно, а результаты заносят в единую базу данных, в соответствии с которой прогнозируют траектории движения подвижных объектов, а также рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами.
Подвижные объекты обнаруживают путем выявления отличий по величине их текущих радиальных скоростей от текущих радиальных скоростей ТС в соответствующих направлениях. Текущие координаты объектов относительно ТС рассчитывают, исходя из их текущих дальностей, текущих направлений на них относительно оси телесного угла сканирования и текущего направления этой оси относительно ТС. Текущие скорости подвижных объектов определяют, исходя из отличий по величине их текущих радиальных скоростей от текущих радиальных скоростей ТС в соответствующих направлениях и изменения текущих координат подвижных объектов в процессе их сопровождения. Координаты объектов относительно ТС в начале следующего цикла сканирования рассчитывают, исходя из их текущих координат относительно ТС в предыдущем цикле сканирования и текущих координат и углового положения ТС в соответствующие моменты времени, а также исходя из текущих координат и углового положения ТС в начале следующего цикла сканирования и текущих скоростей подвижных объектов.
Внешние сигналы управления движением ТС принимают от пилота, автопилота или наземной службы. Координаты, скорость и угловое положение ТС при передаче внешних сигналов управления движением ТС в его систему управления прогнозируют на основании анализа результатов передачи сигналов управления движением ТС в его систему управления в предыдущих циклах, а координаты объектов прогнозируют на основании прогнозируемых координат и углового положения ТС и текущих скоростей подвижных объектов. Траектории движения подвижных объектов прогнозируют на основании анализа изменений их скоростей в предыдущих циклах, а траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами, рассчитывают, исходя из маневренности ТС, прогнозируемых траекторий движения подвижных объектов и координат неподвижных объектов. Коррекцию внешних сигналов управления движением ТС рассчитывают, исходя из необходимости наличия хотя бы одной траектории движения ТС, позволяющей предотвратить его опасное сближение с объектами при передаче скорректированных внешних сигналов управления движением ТС в его систему управления.
В предложенном способе используют подвижную систему координат, связанную с ТС, и точное определение координат ТС с помощью бортовой инерциальной системы навигации необходимо лишь в пределах одного цикла сканирования пространства. А потому, отсутствие глобальной спутниковой системы навигации не приводит к снижению точности определения координат ТС.
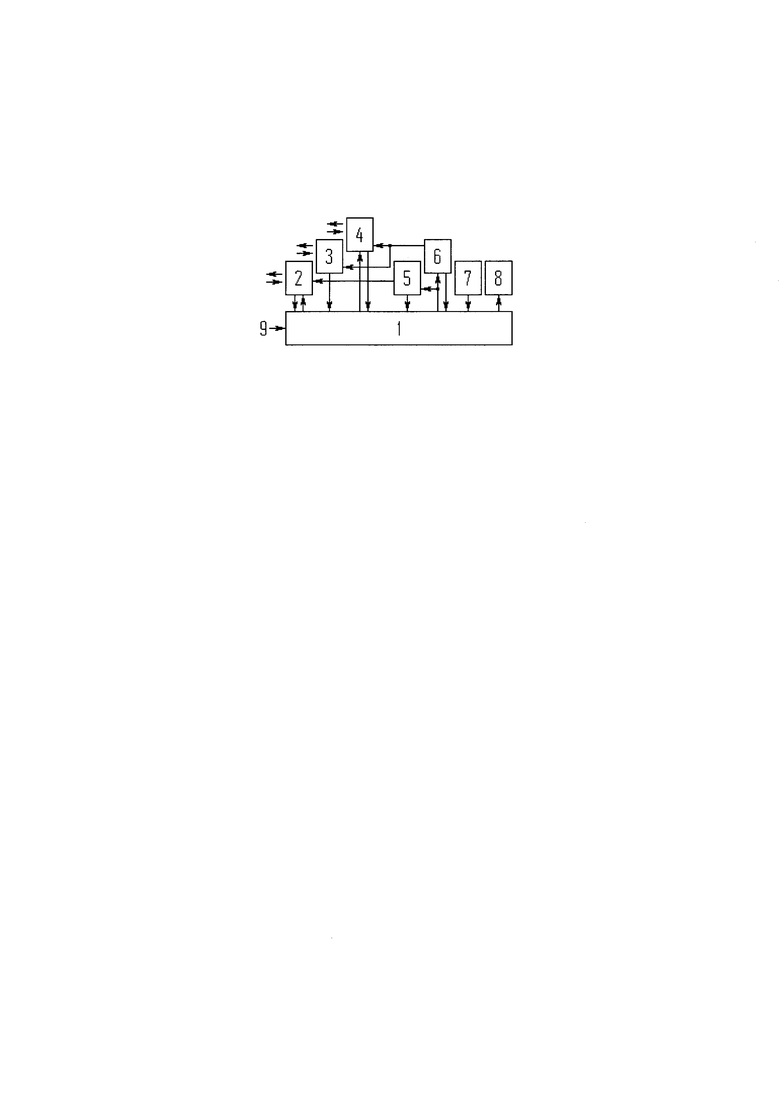
В случае надводного ТС, предложенный способ может быть реализован с помощью системы, блок-схема которой приведена на чертеже.
Блоки: 1 - управляющий вычислитель; 2 - фазированная антенная решетка; 3 - гидролокатор с широким сектором обзора; 4 - гидролокатор с узким сектором обзора; 5, 6 - привод; 7 - бортовая инерциальная система навигации; 8 - система управления движением ТС.
Связи между блоками: 1-2, 1-4 - текущие дальности подвижных объектов относительно ТС и текущие направления на них относительно оси телесного угла сканирования; 1-5-6 - текущее направление вектора скорости ТС; 1-8 - принятые или скорректированные внешние сигналы управления движением ТС; 2-1, 3-1, 4-1 - текущие дальности и радиальные скорости объектов относительно ТС и текущие направления на них относительно оси телесного угла сканирования; 5-1, 5-2 (механическая связь), 6-1, 6-3-4 (механическая связь) - текущее направление оси телесного угла сканирования относительно ТС; 7-1 - текущие координаты, скорость и угловое положение ТС; 9-1 - внешние сигналы управления движением ТС.
Гидролокатор с широким сектором обзора 3 сканирует пространство в пределах телесного угла, текущее направление оси которого совпадает с текущим направлением вектора скорости ТС, и передает информацию об объектах в управляющий вычислитель 1, который обнаруживает подвижные объекты и передает их текущие координаты в гидролокатор с узким сектором обзора 4, который сканирует пространство в пределах телесного угла, текущее направление оси которого совпадает с текущим направлением на очередной подвижный объект, и передает информацию об объектах в управляющий вычислитель 1, который обнаруживает подвижные объекты и определяет их текущие скорости.
В случае воздушного ТС, из указанной системы исключают блоки 3, 4 и 6.
В случае подводного ТС, из указанной системы исключают блоки 2 и 5.
Изобретение относится к системам управления движением. Способ предотвращения опасного сближения транспортного средства (ТС) с объектами, в котором определяют координаты, скорость и угловое положение ТС, сканируют пространство в направлении движения ТС и определяют дальности и радиальные скорости объектов, обнаруживают подвижные объекты и определяют их координаты, сопровождают подвижные объекты и определяют их скорости, рассчитывают координаты объектов относительно ТС, принимают внешние сигналы управления ТС. При этом прогнозируют координаты, скорость и угловое положение ТС, а также координаты объектов при передаче внешних сигналов управления ТС в его систему управления, прогнозируют траектории подвижных объектов и рассчитывают траектории ТС для предотвращения его опасного сближения с объектами, передают внешние сигналы управления ТС в его систему управления при наличии указанных траекторий ТС, рассчитывают коррекцию внешних сигналов управления ТС при отсутствии указанных траекторий ТС, корректируют внешние сигналы управления ТС и передают их в его систему управления. Достигается повышение вероятности предотвращения опасного сближения ТС с объектами. 1 ил.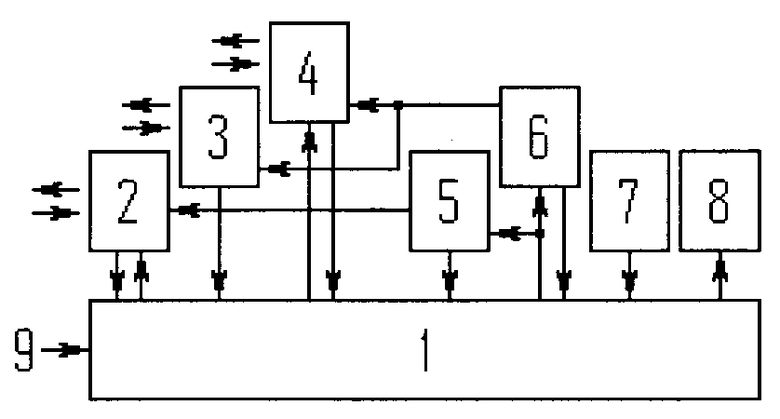
Способ предотвращения опасного сближения транспортного средства (ТС) с объектами, заключающийся в том, что определяют текущие координаты, скорость и угловое положение ТС; сканируют пространство в пределах телесного угла и в каждом направлении сканирования определяют текущие дальность и радиальную скорость объектов относительно ТС; обнаруживают подвижные объекты и рассчитывают их текущие координаты относительно ТС; сопровождают подвижные объекты и определяют их текущие скорости; прогнозируют траектории движения подвижных объектов и рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами;
отличающийся тем, что
сканируют пространство в пределах телесного угла, текущее направление оси которого совпадает с текущим направлением вектора скорости ТС; рассчитывают координаты объектов, находившихся в пределах телесного угла в предыдущем цикле сканирования, относительно ТС в начале следующего цикла сканирования; принимают внешние сигналы управления движением ТС; прогнозируют координаты, скорость и угловое положение ТС при передаче внешних сигналов управления движением ТС в его систему управления, а также координаты объектов, находившихся в пределах телесного угла в предыдущем цикле сканирования, относительно ТС в прогнозируемый момент времени; прогнозируют траектории движения подвижных объектов и рассчитывают траектории движения ТС, позволяющие предотвратить его опасное сближение с объектами при передаче внешних сигналов управления движением ТС в его систему управления; передают внешние сигналы управления движением ТС в его систему управления при наличии указанных траекторий движения ТС; рассчитывают коррекцию внешних сигналов управления движением ТС, необходимую для предотвращения его опасного сближения с объектами, при отсутствии указанных траекторий движения ТС; корректируют внешние сигналы управления движением ТС и передают их в его систему управления.
| US 10453351 B2, 22.10.2019 | |||
| СИСТЕМЫ И СПОСОБЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2018 |
|
RU2711817C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |

