Изобретение относится к области авиации, в частности к способам и устройствам управления движением воздушных судов (ВС). Технический результат заключается в повышении безопасности полетов и пропускной способности воздушного пространства (ВП). Известен способ управления воздушным движением (УВД) [1, 2, 3, 4, 6, 7, 8] и планировании использования воздушного пространства (ПИВП) [5], из которых в качестве прототипов выбраны 4, 5 соответственно для способа и устройства, заключающийся в том, что при ПИВП создают базы данных, а именно: базы данных планов полетов, базы аэродинамических данных параметров ВС, базы аэронавигационных данных статических и динамических, доступ к которым имеют все средства комплекса средств автоматизации планировании использования ВП (КСА ПИВП). Загружают в базу планов полетов информацию об использовании ВП (планы полетов, зоны ограничений) из сети авиационной фиксированной электросвязи (АФТН) и выполняют синтаксическую и логическую проверку полученных данных. Загружают в базу аэронавигационных данных информацию о текущих аэронавигационных данных (точки воздушных трасс, воздушные трассы, зоны ожидания, стандартные схемы вылета и прилета, данные по аэродромам, зоны ограничений использования ВП и т.п), Загружают в базу данных аэродинамических параметров ВС информацию о параметрах ВС из справочников в согласованном формате, цифровые топографические карты местности в зоне ответственности и обрабатывают полученные данные, используя прикладное программное обеспечение, написанное на языке программирования высокого уровня с защитой от несанкционированного доступа, а информационные ресурсы от уничтожения, повреждения и искажения, в вычислительном устройстве КСА ПИВП, с учетом планов полетов, зон ограничений, аэронавигационных данных, опубликованных во Всемирной Геодезической Сисистеме-1984 (WGS-84) или аэронавигационные данные опубликованные в геодезической системе РФ ПЗ.90.11, 4-мерных (3D геодезические координаты + 1D время) траекторий в масштабах зоны ответственности и рассчитывают прогнозируемую траекторию каждого ВС, используя алгоритмы расчета 4-мерных траекторий, с привлечением информации об ограничениях ВП Хранят и обновляют данные о планах полетов, аэронавигационных данных о параметрах ВС в базах данных, к которым имеют доступ на запись и/или чтение потребители из состава модуля КСА ПИВП, и на их основе производят стратегическое и пред-тактическое планирование при этом управляют потоками ВС путем перераспределения воздушного трафика по разным трассам, секторам, учитывая потенциально опасные ситуации, зоны ограничений, пропускную способность секторов управления ВП, включая соседние центры, с учетом прогнозируемой метеорологической информации и выявляют потенциально конфликтные ситуации (пересечения ВС запретных объемов ВП). Вырабатывают рекомендации по безопасности использования ВП с отображением всей информации на рабочих местах диспетчеров планирования. Далее выполняют тактическое планирование. При этом получают информацию о воздушных судах, их координатах и параметрах их движения из модуля баз данных комплекса средств автоматизации управления воздушным движением (КСА УВД) (модуля базы планов полетов, модуля базы аэронавигационных данных, модуля базы аэродинамических параметров воздушных судов). Обрабатывают полученную информацию в вычислительном устройстве модуля КСА ПИВП и рассчитывают параметры планируемых полетов, обновленные динамические аэронавигационные данные, опубликованные во Всемирной Геодезической Сисистеме-1984 (WGS-84), или аэронавигационные данные опубликованные в геодезической системе РФ ПЗ.90.11, используют топографическую карту местности, а также ранее рассчитанные траектории в 4-мерном (3D геодезические координаты + 1D время) виде. Обеспечивают информацией о плановом использовании ВП модуль КСА УВД с помощью информационного обмена по согласованному протоколу и выполняют управление воздушным движением, включающее получение информации о данных наблюдения, метеорологических данных, информации об использовании ВП воздушного пространства от модуля КСА ПИВП, обработку полученных данных в вычислительном устройстве модуля КСА УВД, с учетом аэронавигационных данных, опубликованных во Всемирной Геодезической Сисистеме-1984 (WGS-84) или аэронавигационные данные опубликованные в геодезической системе РФ ПЗ.90.11, создание 4-мерных (3D геодезические координаты + 1D время) траекторий в масштабах зоны ответственности, прогнозирование траектории каждого ВС, используя алгоритмы расчета 4-мерных траекторий, хранение и обновление данных (планы полетов, аэронавигационные данные, данные параметров ВС) в базах данных, к которой имеют доступ на запись и/или чтение модули из состава КСА УВД, и выполняют тактическое планирование при этом создают базы данных, а именно: базы планов полетов, базы аэродинамических параметров воздушных судов, базы аэронавигационных данных, получают информацию от источников данных наблюдения о координатах ВС воздушных судов и параметрах их движения. Обрабатывают полученную информацию в вычислительном устройстве модуля КСА УВД, рассчитывают параметры полетов ВС, используя прикладное программное обеспечение, написанное на языке программирования высокого уровня с защитой от несанкционированного доступа, а информационные ресурсы от уничтожения, повреждения и искажения, обновленные аэронавигационные данные, опубликованные во Всемирной Геодезической Сисистеме-1984 (WGS-84), или аэронавигационные данные, опубликованные в геодезической системе РФ ПЗ.90.11, топографическую карту местности, а также рассчитанные траектории в 4-мерном (3D геодезические координаты + 1D время) виде, восстанавливают местоположение каждого ВС, используя алгоритмы слежения, основанные на нескольких фильтрах Калмана, объединенных вероятностной моделью динамики цели. Осуществляют контроль безопасности воздушного движения, включающий выявление конфликтных ситуации между воздушными суднами и обнаружение входа ВС в зоны ограничений использования воздушного пространства, снижение ниже безопасной высоты, контроль входа в зоны опасных погодных явлений, контроль отклонения ВС от линий курса и глиссады при заходе на посадку. При этом контроль осуществляют путем вычисления отклонения ВС от линий курса и глиссады при заходе на посадку с учетом эшелонирования по расстоянию и времени. При среднесрочном прогнозе (на время до 30 минут) определяют конфликтные ситуации между воздушными суднами, между ВС и зоной ограничений использования ВП. Вырабатывают очередь ВС на прилет, учитывая условия торможения ВС, времени освобождения взлетно-посадочной полосы (ВПП), временя занятия исполнительного старта, ограничения структуры ВП (в том числе в соседних зонах) очередность вылета ВС и представляют всю полученную информацию на рабочие места диспетчеров УВД и одновременно осуществляют централизованное обслуживание для нескольких аэропортов, при этом прогнозируют изменения параметров полета между каждым ВС и всеми другими ВС, находящимися в зоне ответственности, используя аэронавигационные данные, топографическую карту местности, метеорологическую информацию, и вырабатывают предупреждения об обнаружении потенциально конфликтных ситуаций и отображают полученную информацию на рабочих местах диспетчеров УВД.
Недостатками прототипа являются:
1. Неконтролируемый параллелизм в ряде действий. Так, например, происходит вычисление траектории ВС в 4-мерном (3D геодезические координаты + 1D время) пространстве с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) и визуализация на рабочих местах диспетчеров УВД и ПИВП данных траекторий на протяжении всего полета ВС из разных модулей баз данных: из модуля баз данных КСА УВД и модуля баз данных КСА ПИВП. Это приводит к неоднозначной трактовке диспетчерами УВД и ПИВП траектории полета ВС и к ошибке в принятии управленческого решения по организации потоков, что снижает безопасность полетов и пропускную способность ВП.
2. Для обработки всей полученной информации используются плоские проекции что приводить к искажениям и потере точности определения местоположения ВС в отличие от обработки в геоцентрической 3-мерной геодезической системе координат с использованием математических моделей Земли ПЗ.90.11 или WGS-84, а также с учетом всемирного координированного времени (UTC), что увеличивает географический диапазон действия комплекса УВД, и позволяет контролировать воздушную обстановку практически по всему земному шару.
3. При экстраполяции местоположения воздушного судна с использованием фильтра Калмана не используется информация о параметрах движения ВС, полученная непосредственно с борта (путевая и приборная скорости, путевые углы и курсы, числа МВС), что существенно понижает точность определения местоположения ВС, его скорости и курса, что, в свою очередь, приводить к снижению точности прогноза времени захода ВС на посадку, прохождения точек по маршруту и понижает пропускную способности ВП и безопасность полетов.
4. При выявлении краткосрочных конфликтов не используется цифровая карта местности что ведет к менее эффективному использованию ВП
5. При выявлении среднесрочных конфликтов наряду с контролем нарушения норм эшелонирования между ВС и входом в зоны ограничения использования ВП не контролируется снижение ниже минимальной безопасной высоты, и возможность входа ВС в зоны опасных явлений погоды, что уменьшает безопасность полета ВС
6. При анализе безопасности воздушного движения не контролируются ошибочные действия пилота ВС по установке заданной высоты на задатчике высоты ВС, что уменьшает точность управления ВС воздушного судна по командам диспетчера УВД и безопасность его полета.
Технической задачей предложенного способа и устройства является повышение безопасности полетов и пропускной способности ВП. Поставленная задача достигается тем, что при предтактическом и тактическом УВД для каждого ВС используется один, общий для КСА ПИВП и КСА УВД объект управления, его системный план полета, скоррелированный с данными наблюдения (при их наличии), для чего создают общие базы данных как для КСА ПИВП, так и для КСА УВД, доступ к которым имеют все комплексы и устройства, входящие в единый КСА ПИВП и УВД, при этом исключают дублирование вычисления 4-мерных (3D геодезические координаты + 1D время) траекторий в масштабах зоны ответственности, исключают пересылку обработанных данных между комплексами, так как информация хранится в одно месте и доступна пользователям осуществляющим как ПИВП, так и УВД, посылают диспетчерам ПИВП и УВД информацию из одних общих источников, что исключает неидентичность ее во всех вычислительных процессах, а также при отображении у диспетчеров ПИВП и УВД и улучшает точность определения местоположения ВС и повышает безопасность полетов.
Для устранения указанных недостатков в предложенном способе УВД выполняют следующие действия: создают общую базу данных как для ПИВП, так и для УВД, а именно, базу данных планов полетов, базу аэронавигационных данных статических и динамических, базу параметров ВС, загружают в них текущие аэронавигационные данные (точки воздушных трасс, воздушные трассы, зоны ожидания, стандартные схемы вылета и прилета, данные по аэродромам, зоны ограничений ИВП и т.п.), параметры воздушных судов из справочников в согласованном формате, цифровую карту высот подстилающей поверхности земли, топографические карты в зоне ответственности, получают информацию о планируемом использования ВП из сети АФТН с последующей синтаксической и логической проверкой полученных данных, при этом, если полученные данные являются планом полета, то производят расчет 4-мерных (3D геодезические координаты + 1D время) траекторий движения ВС в границах зоны ответственности с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) и параметров ВС, взятых из общей базы аэронавигационных данных и параметров ВС, и записывают информацию о плане полета в общую базу данных планов полетов, а если полученные данные являются изменением зоны ограничения использования ВП, то обновляют информацию об этом параметре в общей базе динамических аэронавигационных данных. Дополнительно получают информацию о координатах ВС и параметрах их движения от источников наблюдения (первичные и/или вторичные радиолокационные средства, станции автоматического зависимого широковещательного наблюдения и т.д.) и на ее основе обновляют информацию о фактическом местоположении ВС в плане полета в общей базе планов полетов и обрабатывают записанные в общую базу данные, как в вычислительных средствах комплекса автоматизации планирования ИВП, так и в вычислительных средствах комплекса автоматизации УВД с учетом планов полетов, зон ограничений ИВП, аэронавигационных данных, опубликованных как во Всемирной Геодезической Сисистеме-1984 (WGS-84), так и/или аэронавигационных данных опубликованных в геодезической системе РФ ПЗ.90.11, параметров ВС, хранящихся в общей базе данных с целью: решения задач стратегического, предтактического и тактического планирования для этого прогнозируют плановую траекторию движения каждого ВС, используя алгоритмы расчета 4-мерных траекторий, основанных на модели полной энергии с привлечением информации о действующих в настоящий момент ограничениях использования ВП из общей базы аэронавигационных данных, используя параметры ВС из общей базы параметров воздушных судов, и передают информацию, полученную расчетным путем, на рабочее место диспетчера планирования для принятия им решений о возможном перераспределении воздушного трафика по разным воздушным трассам, секторам управления, учитывая потенциально опасные ситуации, зоны ограничений ИВП, пропускную способность секторов УВД, включая соседние центры, с учетом прогнозируемой метеорологической информации. Дополнительно рассчитывают потенциально конфликтные ситуации (пересечения ВС запретных объемов ВП) и предоставляют информацию на рабочее место диспетчера планирования для принятия решений, вырабатывают рекомендации по безопасному использованию ВП воздушного пространства и предоставляют информацию на рабочее место диспетчера планирования для принятия решений, рассчитывают нагрузку на элемент ВП и посылают результаты расчетов планируемого использования ВΠ воздушного пространства на рабочее место диспетчера планирования, а в вычислительных устройствах КСА УВД решают задачи тактического планирования и УВД. Для этого корректируют данные планов полетов в общей базе планов полетов с учетом информации о фактических полетах, полученной от источников данных наблюдения и/или смежных центров в согласованном формате, восстанавливают фактическую траекторию движения каждого ВС, используя алгоритмы обработки данных наблюдения, основанные на применении нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели с привлечением дополнительной информации о путевой и приборной скорости, путевых углах и курсы, числа МВС, полученной непосредственно с бота ВС с учетом ранее рассчитанных плановых траекторий движения ВС, хранящихся в общей базе планов полетов. Контролируют безопасность воздушного движение с учетом возможного сближения ВС по расстоянию или времени и при краткосрочном прогнозе (на время до 2 минут) и среднесрочном прогнозе (на время до 30 минут), используя данные о фактической воздушной обстановке, цифровой карте высот, топографической карте местности, обновленных аэронавигационных данных, информацию планов полетов, включая планируемые траектории движения ВС из общих баз данных, при этом выявляют: конфликтные ситуации между ВС, вход ВС в зоны ограничения ИВП, снижение ВС ниже безопасной высоты, отклонение ВС от линии курса и глиссады при заходе на посадку, вход ВС в зоны опасных метеорологический явлений и передают информацию о конфликтных ситуациях на автоматизированное рабочее место диспетчера УВД с целью выработки диспетчером УВД команд для управления ВС. Строят очередность прилета и вылета для нескольких аэродромов, основываясь на планируемой и фактической воздушной обстановке из общей базы планов полетов, на результатах контроля безопасности воздушного движения, на параметрах рабочей взлетно-посадочной полосы (ВВП) аэродромов назначения/вылета с последующим предоставлением всей информацию о фактическом использовании ВП на рабочее место диспетчера УВД, при этом доступ к критическим элементам баз данных, необходимым для обеспечения процедур управления воздушным движением, имеют только КСА УВД. При этом на всех этапах выполнения полета, стратегическом, предтактическом и тактическом для каждого ВС используется один, общий для КСА ПИВП и УВД объект управления, его системный план полета, скоррелированный с данными наблюдения (при их наличии), для чего создают общие базы данных как для КСА ПИВП, так и для КСА УВД, доступ к которым имеют все комплексы и средства, входящие в КСА ПИВП и УВД, при этом исключают дублирование вычисления 4-мерных (3D геодезические координаты + 1D время) траекторий в масштабах зоны ответственности, исключают пересылку обработанных данных между комплексами, так как информация хранится в одном месте и доступна как пользователям осуществляющим ПИВП так и УВД, и посылают диспетчерам ПИВП и УВД информацию из одних общих источников, что исключает неоднозначность информации во всех вычислительных процессах и при отображении у диспетчеров ПИВП и УВД, что улучшает точность определения местоположения ВС и повышает безопасность полетов и повышает пропускную способность ВП воздушного пространства. Кроме этого обрабатывают всю полученную информацию в геоцентрической 3-мерной геодезической системе координат с использованием математических моделей Земли ПЗ.90.11 и/или WGS-84, а также с учетом всемирного координированного времени (UTC), что расширяет географический диапазон действия системы УВД и позволяет контролировать воздушную обстановку практически по всему земному шару. При экстраполяции местоположения ВС с использованием нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели используется информация о параметрах траектории ВС полученная, непосредственно с борта ВС (путевая и приборная скорости, путевые углы и курсы, числа МВС), что существенно повышает точность определения местоположения ВС, его скорости и курса. При выявлении краткосрочных конфликтов используется цифровая карта местности, что ведет к повышению безопасности полетов, особенно в горной местности и к более эффективному использованию ВП. При анализе безопасности полета воздушного движения контролируют действия пилота ВС по установке заданной высоты на задатчике высоты ВС воздушного судна, что увеличивает точность управления ВС по командам диспетчера УВД и безопасность его полета.
Как показал проведенный заявителем информационный поиск, из уровня техники не известны способы УВД управления воздушным движением с перечисленной совокупностью существенных признаков, то есть, заявляемые способ с учетом зависимых пунктов формулы обладают новизной в сравнении с прототипом, отличаясь от него тем, что:
1. Создают общие базы данных как для ПИВП, так и для УВД, доступ к которым имеют все пользователи ПИВП и УВД.
2. Производят вычисление траектории ВС в 4-мерном (3D геодезические координаты + 1D время) пространстве в масштабах всей Земли с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) в блоке, общем для ПИВП и УВД, визуализацию на рабочих местах диспетчеров УВД и ПИВП данных траекторий на протяжении всего полета ВС судна из общих модулей баз данных Это приводит к однозначной трактовке диспетчерами траектории полета ВС и к исключению ошибок в принятии управленческого решения, что увеличивает безопасность полетов;
3. Обрабатывают всю полученную информацию в геоцентрической 3-мерной геодезической системе координат с использованием математических моделей Земли ПЗ.90.11 и/или WGS-84, а также с учетом всемирного координированного времени (UTC), что повышает диапазон (географический) действия системы УВД, что позволяет контролировать воздушную обстановку практически по всему земному шару.
4. При экстраполяции местоположения ВС с использованием нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели, используют информацию о параметрах траектории ВС, полученную непосредственно с борта ВС (путевая и приборная скорости, путевые углы и курсы, числа МВС), что существенно повышает точность определения местоположения ВС, его скорости и курса.
5. При выявлении краткосрочных конфликтов используют цифровую карту местности что ведет к повышению безопасности полетов и более эффективному использованию ВП.
6. При выявлении среднесрочных конфликтов наряду с контролем нарушения норм эшелонирования между ВС и входом в зоны ограничения использования ВП контролируют снижение ниже минимальной безопасной высоты и возможность входа ВС в зоны опасных явлений погоды, что увеличивает безопасность полета ВС.
7. При анализе безопасности воздушного движения контролируют неверные действия пилота ВС по установке заданной высоты на задатчике высоты ВС, что увеличивает точность управления ВС по командам диспетчера УВД и безопасность его полета. Таким образом, за счет новых действий, перечисленных выше, авторами решена поставленная техническая задача повышения безопасности полетов и пропускной способности ВП.
Предложенный способ может быть реализован с использованием таких математических алгоритмов, как метод взаимодействующих моделей с использованием нескольких фильтров Калмана для разных типов движения, методов линейного программирования, решения уравнений движения материальной точки в трехмерном пространстве. Для расчета плановых траекторий может быть использован метод полной энергии, что подтверждает техническую реализуемость способа.
Устройство для реализации нового способа также относится к области авиации, в частности к устройствам автоматизации управления движением ВС. Технический результат заключается в повышении безопасности полетов и пропускной способности ВП, в упрощении структуры устройства и уменьшении связей между частями устройства, что повышает надежность устройства и, как следствие, увеличивает безопасность полетов. В качестве прототипа выбраны два устройства КСА УВД «Синтез» и КСА ПИВП «Синтез» разработки и производства АО «ВНИИРА». Описание КСА УВД «Синтез» и КСА ПИВП «Синтез» приведено в буклетах и на сайте производителя: http://www.vniira.ru/ru/products/806/817/1181?text=basic-purpose http://www.vniira.ru/ru/products/806/818/1182?text=basic-purpose.
Устройство объединенного прототипа представлено на фиг.1, 2, 3.
На фиг.1. 2. 3 обозначено:
1 - раздельная система планирования и управления воздушным движением;
2 - модуль баз данных УВД;
3 - КСА УВД;
4 - блок базы планов полетов;
5 - блок базы аэронавигационных данных;
6 - блок базы аэродинамических параметров воздушных судов;
7 - автоматизированные рабочие места диспетчеров УВД;
8 - блок контроля безопасности воздушного движения;
9 - блок обработки данных наблюдения;
10 - блок обработки плановой информации;
11 - первый блок построения 4D траектории;
12 - КСА ПИВП;
13 - автоматизированные рабочие места диспетчеров ПИВП;
14 - блок организации потоков воздушного движения;
15 - блок первичной обработки плановой информации;
16 - блок модуль построения 4D траектории;
17 - модуль баз данных ПИВП;
18 - блок базы планов полетов;
19 - блок базы аэронавигационных данных;
20 - блок базы аэродинамических параметров воздушных судов.
Раздельная система планирования и управления воздушным движением 1, состоит из КСА УВД 3 и КСА ПИВП 12. КСА УВД 3 включает модуль баз данных УВД 2, состоящий из блока базы планов полетов 4, блока базы аэронавигационных данных 5, блока базы аэродинамических параметров воздушных судов 6. Кроме этого в состав КСА УВД 3 входят: автоматизированные рабочие места диспетчеров УВД 7, блок контроля безопасности воздушного движения 8, блок обработки данных наблюдения 9, блок обработки плановой информации 10 и первый блок построения 4D траектории 11. КСА ПИВП 12 состоит из модуля баз данных ПИВП 17, включающий блок базы планов полетов 18, блок базы аэронавигационных данных 19, блок базы аэродинамических параметров воздушных судов 20, и кроме этого в состав КСА ПИВП входят: автоматизированные рабочие места диспетчеров планирования 13, блок организации потоков воздушного движения 14, блок первичной обработки плановой информации 15, второй блок построения 4D траектории 16.
На фиг.1 показаны связи между частями раздельного устройства и видно, что выход 1 базы данных УВД 2 подключен ко 2 входу блока контроля безопасности воздушного движения 8. Вход 2 базы данных УВД 2 подключен к первому выходу автоматизированных рабочих мест диспетчеров УВД 7, а выход 3 модуля базы данных УВД 2 подключен к входу 2 автоматизированных рабочих мест диспетчеров УВД 7 Выход 4 модуля базы данных УВД 2 подключен к входу 1 блока обработки плановой информации 10, выход 2 которого подключен к 5 входу модуля базы данных УВД 2, а вход 6 модуля базы данных УВД 2 подключен к 1 выходу первого блока построения 4D траектории 11, 2 вход которого подключен к 7 выходу модуля базы данных УВД 2, выход 1 блока контроля безопасности воздушного движения 8 соединен с 3 входом автоматизированных рабочих мест диспетчеров 7, а выход 5 блока обработки данных наблюдения 9 подключен к 4 входу автоматизированных рабочих мест диспетчеров 7, при этом 3 и 4 выход и соответственно вход блока контроля безопасности воздушного движения 8 соединены соответственно с 1 входом и 2 выходом блока обработки данных наблюдения 9, выход 4 которого подключен к 8 входу блока обработки плановой информации 10, а 3 вход блока обработки данных наблюдения 9 подключен к 3 входу КСА УВД 3, а 4 выход блока обработки плановой информации 10 соединен с 1 выходом КСА УВД 3, вход 2 которого соединен с 5 входом блока обработки плановой информации 10, вход 3 которого соединен с 4 выходом первого блока построения 4D траектории 11, а выход 9 блока обработки плановой информации 10 соединен с входом 3 блока построения 4D траектории 11, а вход 6 блока обработки плановой информации 10 соединен с 4 входом КСА УВД 3, а 7 выход блока обработки плановой информации 10 соединен с 5 выходом КСА УВД 3.
Аналогично модуль баз данных ПИВП 17 своим 1 входом соединен с 1 выходом автоматизированными рабочими местами диспетчеров планирования 13, выход 3 которого соединен с выходом 1 блока организации потоков воздушного движения 14, вход 2 которого соединен с выходом 2 модуля баз данных ПИВП 17, а его 3 выход соединен с 2 входом блока организации потоков воздушного движения 14, выход 1 которого соединен с 3 входом автоматизированных рабочих мест диспетчеров планирования 13, при этом 4 выход и 5 вход модуля баз данных ПИВП 17 соединены соответственно с 8 входом и выходом 7 блока первичной обработки плановой информации 15; модуль баз данных ПИВП 17 своим входом 6 и выходом 7 соединены соответственно с 3 выходом и 4 входом второго блока построения 4D траектории 16, выход 1 и вход 2 которого соединены соответственно с 5 входом и 6 выходом блока первичной обработки плановой информации 15, а его 3 выход и 4 вход соединены с выходом 1 и входом 2 КСА ПИВП 12, а 1 вход и 2 выход блока первичной обработки плановой информации 15 соединены с 3 входом и 4 выходом соответственно КСА ПИВП 12, а его 3 вход и 4 выход соединены с 5 выходом и 4 входом соответственно КСА УВДЗ.
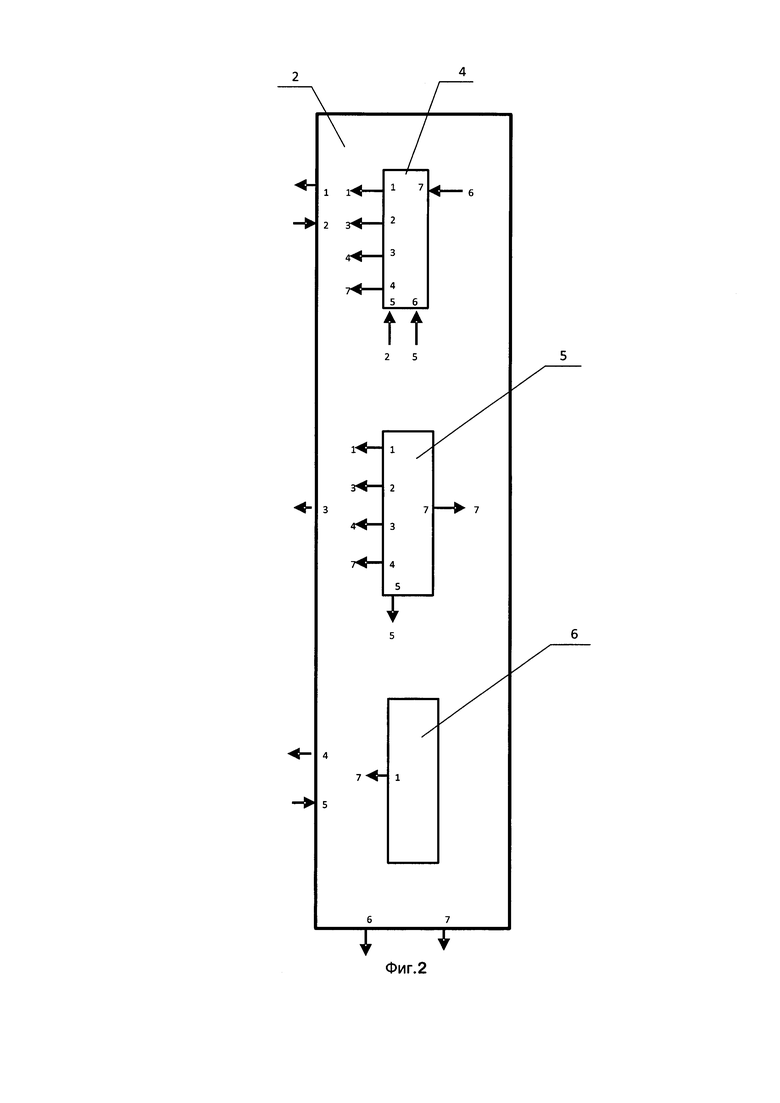
На фиг.2 показаны связи блоков баз данных 4, 5, 6 с выходами и входами модуля баз данных УВД 2. Так выходы 1, 2, 3, 4 блока базы планов полетов 4 соединены с выходами 1, 3, 4, 7 модуля баз данных УВД 2, а его входы 5, 6, 7 соединены с входами 2, 5, 6 модуля баз данных УВД 2. Выходы 1, 2, 3, 4 блока базы аэронавигационных данных 5 соединены соответственно с выходами 1, 3, 4, 7 модуля баз данных УВД 2, а выход 5 блока базы аэронавигационных данных 5 соединен с входом 5 модуля баз данных УВД 2. Выход 7 модуля блока аэронавигационных данных 5 соединен с выходом 7 модуля баз данных УВД 2. Выход 1 блока базы аэродинамических параметров воздушных судов 6 соединен с выходом 7 модуля баз данных УВД 2.
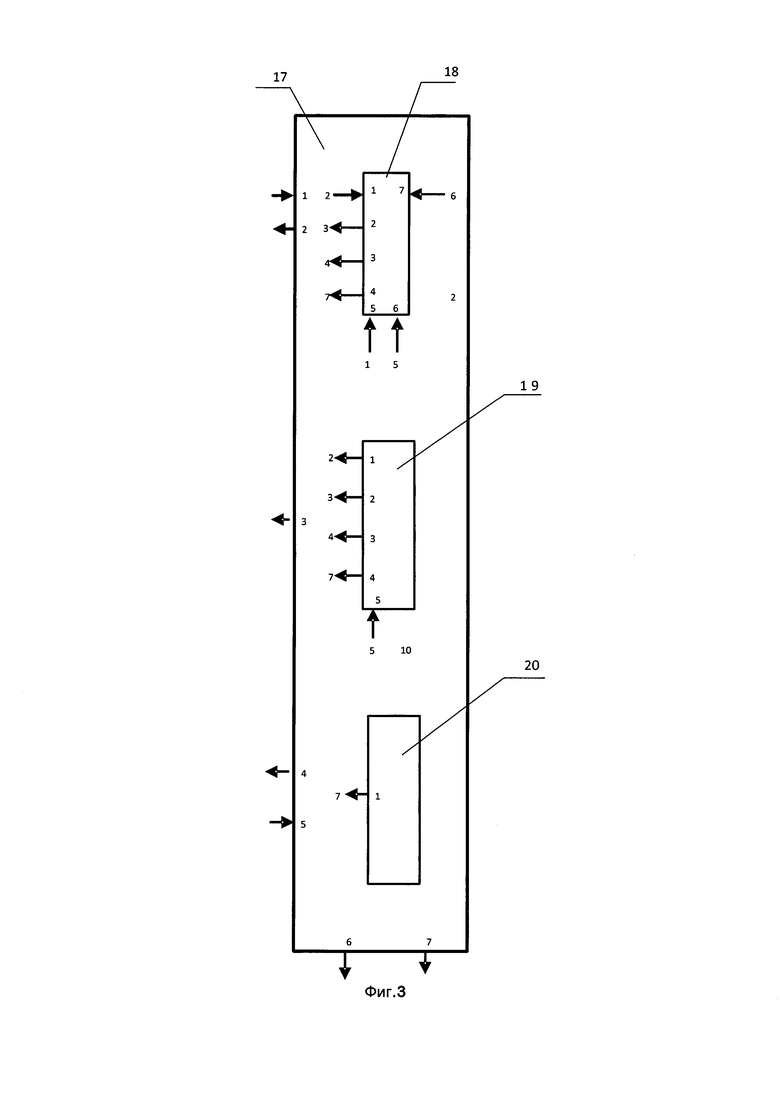
На фиг.3 показаны связи блоков баз данных 18, 19, 20 с входами и выходами модуля баз данных ПИВП 17. Выходы 1, 2, 3, 4 блока базы планов полетов 18 оединены с выходами 2, 3, 4, 7 модуля баз данных ПИВП 17, а его входы 5, 6, 7 соединены с входами 1, 5, 6 модуля баз данных ПИВП 17. Выход 1 блока базы аэродинамических параметров воздушных судов 20 соединен с выходом 7 модуля баз данных ПИВП 17. Выходы 1, 2, 3, 4 блока базы аэронавигационных данных 19 соединены соответственно с выходами 2, 3, 4, 7 модуля баз данных ПИВП 17, а вход 5 соединен с входом 5 модуля баз данных ПИВП 17.
Раздельная система УВД 1 работает следующим образом. В модуль КСА УВД 3 на вход 3 раздельной системы УВД 1 поступает информация от внешних источников данных наблюдения (первичные или вторичные радиолокаторы, станции зависимого наблюдения и т.д.), которая передается на вход 3 КСА УВД 3 и далее на 3 вход блока обработки данных наблюдения 9 для определения фактического местоположения каждого ВС, используя алгоритмы обработка данных наблюдения, основанные на применении фильтров Калмана. Обработанную информацию о фактическом местоположении ВС блок обработки данных наблюдения 9 через выходы 2, 4 и 5 передает на вход 8 блока обработки плановой информации 10, вход 4 автоматизированных рабочих мест диспетчеров УВД 7 и вход 8 блока контроля безопасности воздушного движения 8. На вход 6 блока обработки плановой информации 10 КСА УВД 3 всего устройства 1, с выхода 4 КСА ПИВП 12 поступает информация о планах полетов и зонах ограничений для хранения в модуле баз данных. Через выход 1 и вход 2 КСАУВД 3 осуществляется связь со смежными центрами для обмена информацией о координационных данных о взлетающих ВС, эта информация поступает через выход 1 и вход 2 КСА УВД 3 и далее через выход 4 и вход 5 блока обработки плановой информации 10. Полученная информация служит для обновления информации в плане полета по ВС, находящемуся в воздухе, для этого на вход 1 блока обработки плановой информации 10 с выхода 4 модуля баз данных УВД 2 и с выхода 1 блока базы планов полетов 4 поступает информация о всех планах полетов для ее корреляции с полученными данными с целью обновления. После обновления или создания плана полета производится расчет 4-мерных (3D геодезические координаты + 1D время) траекторий с помощью первого блока построения 4D - траектории ВС 11. С его выхода 1 через вход 6 модуля баз данных УВД 2 поступает на вход 7 блока базы планов полетов 4 обновленная информация для хранения. После обновления или создания зоны ограничений полета с выхода 2 блока обработки плановой информации 10 через вход 5 модуля баз данных УВД 2 на вход 5 блока базы аэронавигационных данных 5 поступает обновленная информация для хранения. Первый блок построения 4D траектории ВС 11 через вход 3 получает информацию о плане полета от 9 выхода блока обработки плановой информации 10, через вход 2 получает информацию с выхода 7 модуля баз данных УВД 2, такую как: аэронавигационные данные (выход 1 блока базы аэронавигационных данных 6), параметры воздушных судов (выход 1 блока базы параметров воздушных судов 5), для расчета 4-мерных (3D геодезические координаты + 1D время) траекторий движения каждого ВС, используя алгоритмы расчета 4-мерных траекторий с привлечением информации об ограничениях ВП в масштабах зоны ответственности с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) и параметров ВС из блока базы аэронавигационных данных и блока базы параметров ВС. Обработанную информацию, включающую в себя план полета с рассчитанной 4-х мерной траекторией из первого блока построения 4D траектории ВС 11 передают через выход 4 на вход 3 модуля обработки плановой информации 10. Блок обработки плановой информации 10, получая информацию с выхода 4 блока обработки данных наблюдения 9 на свой вход 8, а также информацию о ранее рассчитанных 4-х мерных траекториях планов полетов и аэронавигационной информации, полученную на свой вход 1 через выход 4 модуля баз данных УВД 2, на который поступает информация с выхода 3 блока базы планов полетов 4 и выхода 3 блока базы аэронавигационных данных 5 с учетом расчета по расстоянию или времени при краткосрочном прогнозе (на время до 2 минут) выявляют: конфликтные ситуации между ВС, вход ВС в зоны ограничения использования ВП, снижение ВС ниже безопасной высоты, отклонение ВС от линии курса и глиссады при заходе на посадку, вход ВС в зоны опасных метеорологических явлений и при среднесрочном прогнозе (на время до 30 минут) выявляют: конфликтные ситуации между ВС, вход ВС в зоны ограничения использования ВП, и выдают информацию о конфликтных ситуациях через выход 1 блока контроля безопасности воздушного движения 8 на вход 3 автоматизированных рабочих мест диспетчеров УВД 7. Автоматизированное рабочее место диспетчера УВД 7 отображает всю информацию о фактической воздушной обстановке, полученной от блока обработки данных наблюдения 9 со своего выхода 5 на вход 4 автоматизированного рабочего места диспетчера УВД 7, конфликтные ситуации, полученные от блока контроля безопасности воздушного движения 8, а также информацию о планах полетов и аэронавигационные данные, полученные на вход 2 с выхода 2 блока базы планов полетов 4 и 2 блока базы аэронавигационных данных 6 с выхода 3 блока баз данных УВД 3 с целью выработки диспетчером УВД команд для управления ВС, очередности прилета и вылета для нескольких аэропортов, основываясь на фактической воздушной обстановки, на результатах контроля безопасности воздушного движения, на параметрах ВВП аэродромов назначения/вылета.
В блоке организации потоков воздушного движения 14 через вход 2 и выход 1 раздельной системы УВД 1 осуществляется обмен данными использования ВП через сеть АФТН в согласованном формате. Это информация поступает через выход 1 и вход 2 КСА ПИВП 12 и далее через выход 3 и вход 4 блока первичной обработки плановой информации 15 для последующей синтаксической и логической проверки полученных данных. Если полученные данные являются планом полета, то производят расчет 4-мерных (3D геодезические координаты + 1D время) траекторий с помощью второго блока построения 4D траекторий ВС 16 и через выход 7 на вход 5 модуля баз данных ПИВП 17 входа 6 планов полетов 18 записывают информацию о плане полета блок в базу планов полетов, а если полученные данные являются изменением ограничения зоны ИВП - обновляют информацию об этом параметре в блока базы аэронавигационных данных через вход 5 блока базы аэронавигационных данных 20. Так же для всех планов полетов рассчитываются потенциально конфликтные ситуации (пересечение ВС зоны ограничения использования ВП) для этих целей на вход 8 с выхода 4 модуля баз данных ПИВП 17 с выхода 2 блока базы аэронавигационных данных 20 берется информация о всех зонах ограничений ИВП и сравнивается с рассчитанной ранее 4-х мерной траекторией в плане полета. Обработанная информация (планы полетов, зоны ограничений использования ВП) с 3 выхода через 4 выход блока средств автоматизации использования воздушного пространства 12 передаются на 4 вход КСА УВД 3. Второй блок построения 4D траектории ВС 16 через вход 2 получает информацию о плане полета с 6 выхода блока первичной обработки плановой информации 15, через вход 4 получает информацию с выхода 7 блока баз данных ПИВП 17, такую как: аэронавигационные данные (выход 4 блока базы аэронавигационных данных 20), параметры воздушных судов (выход 1 блока базы параметров воздушных судов 19), для расчета 4-мерных (3D геодезические координаты + 1D время) траекторий движения каждого ВС, используя алгоритмы расчета 4-мерных траекторий, с привлечением информации об ограничениях ВП в масштабах зоны ответственности с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) и параметров ВС из базы аэронавигационных данных и базы параметров ВС. Обработанную информацию, включающую в себя план полета с рассчитанной 4-х мерной траекторией, второй модуль построения 4D траектории ВС 16 передает через выход 1 на вход 5 блока первичной обработки плановой информации 15. Блок организации потоков воздушного движения 14, используя информацию о планах полетов и зонах ограничений использования ВП, полученных на вход 2 блока базы планов полетов 18 и выхода 2 блока базы аэронавигационных данных 20 через выход 3 модуля баз данных ПИВП 17, анализируют возможность перераспределения воздушного трафика по разным воздушным трассам и маршрутам, секторам управления, учитывая потенциально опасные ситуации, зоны ограничений, пропускную способность секторов УВД, включая соседние центры, с учетом прогнозируемой метеорологической информации, вырабатывают рекомендации по безопасному использованию ВП, рассчитывают нагрузку на элементы ВП и посылают результаты расчетов через выход 1 на вход 3 автоматизированного рабочего места диспетчера планирования 13. Автоматизированное рабочее место диспетчера планирования 13 отображает информацию, полученную от блока организации потоков воздушного движения 14, а также информацию о планах полетов и аэронавигационных данных полученных на вход 2 с выходов 1 блока базы планов полетов 18 и 1 базы аэронавигационных данных 20 через 2 выход модуля баз данных ПИВП 17 с целью выработки диспетчером планирования соответствующих решений по увеличению пропускной способности ВП.
Отличительной особенностью предлагаемого устройства от прототипа является отсутствие обратной связи от КСА УВД к КСА ПИВП, наличие общей базы данных и единого модуля расчета траектории ВС в каждом из комплексов. Устройство для реализации предлагаемого способа упрощается за счет создания общих баз данных, объединенных в модуль общих баз, и изменения связей внутри устройства. Схема устройства представлена на фиг.4, 5, где обозначено:
1 - КСА ПИВП и УВД;
2 - модуль КСА УВД;
3 - модуль общих баз данных;
4 - модуль КСА ПИВП;
5 - блок автоматизированного рабочего места диспетчера УВД;
6 - блок контроля безопасности воздушного движения;
7 - блок обработки плановой информации;
8 - блок обработки данных наблюдения;
9 - блок общей базы аэронавигационных данных;
10 - блок общей базы планов полетов;
11 - блок общей базы аэродинамических параметров воздушных судов;
12 - автоматизированное рабочее место диспетчера ПИВП;
13 - блок организации потоков воздушного движения;
14 - блок первичной обработки плановой информации;
15 - блок построения 4D- траектории ВС.
На фиг.2 обозначено
3 - модуль общих баз данных;
9 - блок общей базы аэронавигационных данных;
10 - блок общей базы планов полетов;
11 - блок общей базы аэродинамических параметров воздушных судов.
Стрелкой с двумя цифрами обозначено присоединение входа/выхода блока баз данных с входом/выходом модуля общих баз данных 3.
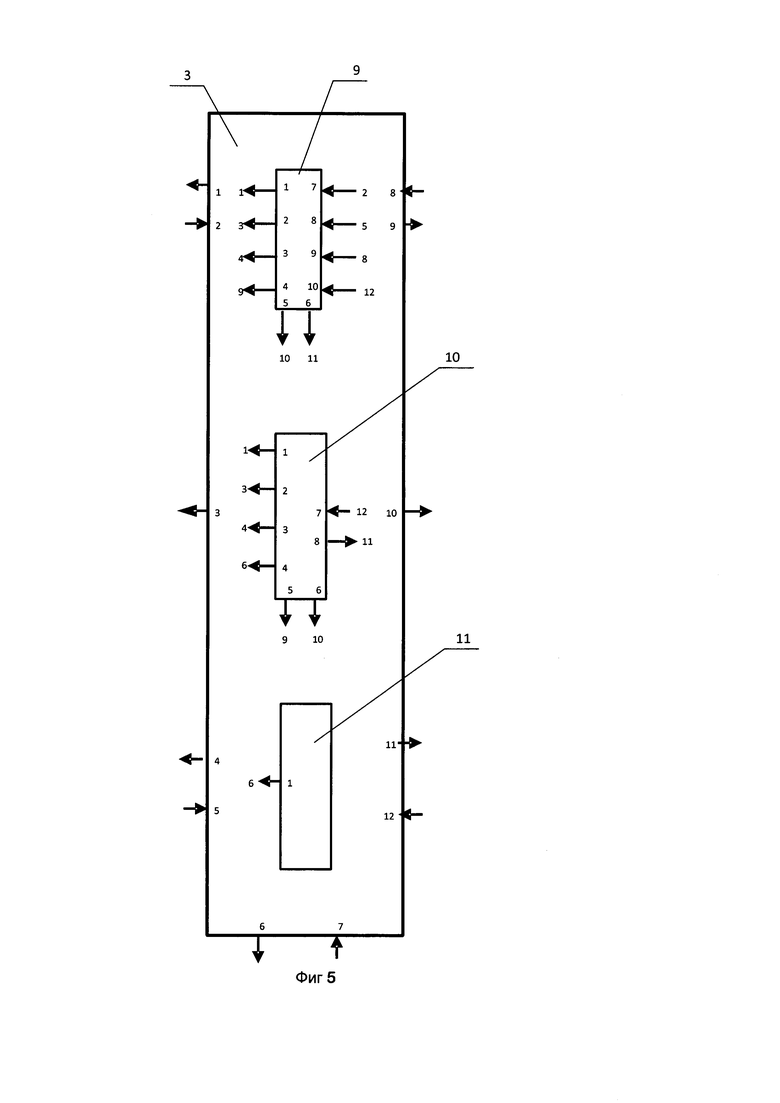
В КСА ПИВП и УВД 1 обозначены цифрами 1, 3, 5 его входы, а цифрами 2, 4 - выходы. В модуле КСА УВД 2 обозначены цифрами 1, 3, 4, 6, 8, 9, 11 его входы, а цифрами 2, 5, 7, 10 - выходы. В модуле общих баз данных 3 цифрами 1, 3, 4, 6, 9, 10, 11 его выходы, а цифрами 2, 5, 7, 8, 12 - входы. В модуле КСА ПИВП 4 цифрами 1, 5, 6, 8 обозначены его выходы, а цифрами 2, 3, 4, 7, 9 - его входы. В блоке автоматизированного рабочего места диспетчера УВД 5 цифрами обозначены 1, 2, 3 его входы. В блоке контроля безопасности воздушного движения 6 цифрами 2, 3 обозначены его входы, цифрой 1-выход. В блоке обработки плановой информации 7 цифрами 1, 3, 4, 6 обозначены входы, а цифрами 2, 5 - его выходы. В блоке обработки данных наблюдения 8 цифрами 1,2,3 обозначены его выходы, а цифрой 2 - его вход. В блоке общей базы планов полетов 9, цифрами 1, 2, 3, 4, 5, 6 обозначены его выходы, а цифрами 7, 8, 9, 10 - входы (см фиг.2). В блоке общей базы аэродинамических данных 10 цифрами 1, 2, 3, 4, 5, 6, 7 его выходы, а цифрой 8 обозначен вход (см фиг.2). В блоке общей базы параметров воздушных судов 11 цифрой 1 обозначен его выход (см фиг.2). В автоматизированном рабочем месте диспетчера планирования 12 цифрой 1 обозначен его выход, а цифрами 2, 3 его вход. В блоке первичной обработки плановой информации 14 цифрой 1 обозначен его выход, цифрой 2 - его вход. В блоке организации потоков воздушного движения 13 цифрами 1, 3,5 обозначены его входы, а цифрами 2, 3, 4 - его выходы. В блоке построения 4D траектории ВС 15 цифрами 2, 3, 5 обозначены его входы, а цифрами 1, 3, 6 - его выходы. При этом вход 1 КСА ПИВП и УВД 1 связан с внешними источниками данных наблюдения (первичные или вторичные радиолокаторы, станции зависимого наблюдения широковещательные и т.д.), а вход 3 со смежными центрами для получения координационных данных о влетающих ВС, а вход 5 с сетью АФТН для получения данных использования ИП, а выход 2 связан со смежными центрами для выдачи координационных данных о вылетающих ВС и выход 4 связан соответственно с сетью АФТН для передачи данных внешним потребителям. Аналогично выходы 2, 5 модуля КСА УВД 2 соединены с входами 2 и 5 соответственно модуля общих баз данных 3, а входы 1 и 4 КСА УВД 2 соединены соответственно с выходами 1 и 4 модуля общих баз данных 3. Вход 6 модуля КСА УВД 2 соединен с входом 1 КСА ПИВП и УВД 1, а выход 7 модуля КСА УВД 2 связан с выходом 2 КСА ПИВП и УВД 1. Вход 8 КСА УВД 2 соединен с входом 3 КСА ПИВП и УВД 1. Вход 9 и выход 10 модуля КСА УВД 2 соединены соответственно с выходом 1 и входом 2 блока построения 4D траектории ВС 15. Выход 1 и вход 3 автоматизированного рабочего места диспетчера УВД 5 соединены соответственно с входом 1 и выходом 2 модуля КСА УВД 2, а его вход 2 с выходом 1 блока контроля безопасности воздушного движения 6, вход которого 2 соединен со входом 3 КСА УВД 2. Выходы 2, 5 и входы 3, 4 блока обработки плановой информации 7 соединены соответственно с входами 8, 9 и выходами 7, 10 модуля КСА УВД 2. Вход 1 автоматизированного рабочего места диспетчера УВД 5 соединен с выходом 2 блока обработки данных наблюдения 8, а его выход 3 соединен с входом 3 блока контроля безопасности воздушного движения 6, а выход 1 соединен с входом 1 блока обработки плановой информации 5. Вход 2 соединен с входом 6 модуля КСА УВД 2, который соединен с входом 1 КСА ПИВП и УВД 1. Выход 6 и вход 7 модуль общих баз данных 3 соединены соответственно с входом 3 и выходом 4 блока построения 4D траектории ВС 15. Выходы 9, 10, 11 модуля общих баз данных 3 соединены соответственно с входами 2, 3, 4 модуля КСА ПИВП 4. Выходы 6, 8 и входы 7, 9 модуля КСА ПИВП 4 соединены соответственно с входом 5 и выходом 6 блока построения 4D траектории ВС 15 и с выходом 4 и входом 6 модуля КСА ПИВП и УВД 1. Выход 1 и вход 2 автоматизированного рабочего места диспетчера планирования 12 соединены соответственно с входом 2 и выходом 1 модуля КСА ПИВП 4, а его вход 3 с выходом 1 блока организации потоков воздушного движения 13, вход которого 2 соединен со входом 3 модуля КСА ПИВП 4. Выходы 3, 5 и входы 4, 6 блока первичной обработки плановой информации 14 соединены соответственно с входами 7, 9 и выходами 6, 8 модуля КСА ПИВП 4. Выходы 1, 2, 3, 4, 5, 6 блока общей базы планов полетов 9 соединены с выходами 1, 3, 4, 9, 10, 11 модуля общих баз данных 3, а его входы 7, 8, 9, 10 соединены с входами 2, 5, 8, 12 модуля общих баз данных 3. Выходы 1, 2, 3, 4, 5, 6, 7 блока общей базы аэродинамических данных 10 соединены соответственно с выходами 1, 3, 4, 6, 9, 10, 11 модуля общих баз данных 3, а вход 8 соединен с входом 12 модуля общих баз данных 3 (см. фиг.5). Выход 1 блока общей базы параметров воздушных судов 11 соединен с выходом 6 модуля общих баз данных 3.
Устройство работает следующим образом.
На вход 1 КСА ПИВП и УВД 1 поступает информация от внешних источников данных наблюдения (первичные или вторичные радиолокаторы, станции зависимого наблюдения широковещательные и т.д.), которая передается на вход 6 модуля КСА УВД 2 и далее на 2 вход блока обработки данных наблюдения 8 для расчета и определения фактического местоположения каждого ВС, используя алгоритмы обработка данных наблюдения, основанные на применении нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели с привлечением дополнительной информации о путевой и приборной скорости, путевых углах и курсы, числа МВС, полученной непосредственно с бота ВС. Обработанную информацию фактическом местоположении ВС блок обработки данных наблюдения 8 через выходы 1, 2 и 3 передает на вход 1 блока обработки плановой информации 7, вход 1 автоматизированного рабочего места 5 и вход 3 блока контроля безопасности воздушного движения 6. Через выход 2 и вход 3 КСА ПИВП и УВД осуществляется связь со смежными центрами для обмена информацией о координационных данных о влетающих ВС, эта информация поступает через выход 7 и вход 8 модуля автоматизации управления воздушным движением УВД 2 и далее через выход 2 и вход 3 попадает или выдается с блока обработки плановой информации 7. Полученная информация служит для обновления информации в плане полета по ВС находящемуся в воздухе для этого на вход 7 с входа 4 модуля КСА УВД 2 с выхода 4 модуля общих баз данных 3 выход 3 блока общей базы планов полетов 9 поступает информация о всех планах полетов для ее корреляции с полученными данными с целью обновления. После обновления с выхода 6 через выход 5 модуля КСА УВД 2 на вход 5 модуля общих баз данных 3 вход 8 общей базы планов полетов 9 поступает обновленная информация для хранения. Через вход 5 и выход 4 КСА ПИВП и УВД 1 осуществляется обмен данными ИВП через сеть АФТН в согласованном формате. Это информация поступает через выход 8 и вход 9 модуля автоматизации планирования использования воздушного пространства ПИВП 4 и далее через выход 5 и вход 6 блока первичной обработки плановой информации 14 для последующей синтаксической и логической проверки полученных данных. Если полученные данные являются планом полета, то производят расчет 4-мерных (3D геодезические координаты + 1D время) траекторий с помощью блока построения 4D траектории ВС 15 и через выход 2 и далее через выход 5 модуля КСА ПИВП 4 на вход 12 модуля общих баз данных 3 входа 10 блока общей базы планов полетов 9 записывают информацию о плане полета в общую базу планов полетов, а если полученные данные являются изменением ограничения зоны ИВП, то обновляют информацию об этом параметре в общей базе аэронавигационных данных через вход 7 блока общей базы аэронавигационных данных 10. Так же для всех планов полетов рассчитываются потенциально конфликтные ситуации (пересечение ВС зоны ограничения ИВП) для этих целей на вход 1 через выход 4 модуля КСА ПИВП 4 с выхода 11 модуля общих баз данных 3 выхода 8 блока общей базы аэронавигационных данных 10 берется информация о всех зонах ограничений ИВП и сравнивается с рассчитанной ранее 4-х мерной траекторией в плане полета. Блок построения 4D - траектории ВС 15 через входы 2 и 5 получает информацию о плане полета от 10 выхода модуля КСА УВД 2, который в свою очередь получает информацию от 5 выхода блока обработки плановой информации 7, и 6 выхода модуля КСА ПИВП 4, который в свою очередь получает информацию от 3 выхода блока первичной обработки плановой информации 14, через вход 3 получает информацию с выхода 6 модуля общих баз данных 3, такую как: аэронавигационные данные (выход 1 блока общей базы аэронавигационных данных 10), параметры воздушных судов (выход 1 блока общей базы параметров воздушных судов 11), для расчета 4-мерных (3D геодезические координаты + 1D время) траекторий движения каждого ВС, используя алгоритмы расчета 4-мерных траекторий, основанных на модели полной энергии с привлечением информации об ограничениях воздушного пространства в масштабах зоны ответственности с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) и параметров воздушного судна из общей базы аэронавигационных данных 10 и общей базы параметров воздушных судов 11. Обработанную информацию, включающую в себя план полета с рассчитанной 4-х мерной траекторией, блок построения 4D траектории ВС 15 передает через выход 1 на вход 9 модуля автоматизации управления воздушным движением УВД 2 и далее на вход 4 блока обработки плановой информации 7, а через выход 6 так же передается информация на вход 7 КСА ПИВП 4 и далее на вход 4 выхода блока первичной обработки плановой информации 14. Блок контроля безопасности воздушного движения 6, получая информацию от блока обработки данных наблюдения 8, а также информацию о ранее рассчитанных 4-х мерных траекторий планов полетов и аэронавигационную информацию, поступающую на вход 2 через вход 3 модуля КСА УВД 2 через выход 3 модуля общих баз данных 3 с выхода 2 блока общей базы планов полетов 9 и выхода 2 блока общей базы аэронавигационных данных 10 с учетом расчета по расстоянию или времени при краткосрочном прогнозе (на время до 2 минут) выявляют: краткосрочные конфликтные ситуации между ВС, вход ВС в зоны ограничения ИВП, снижение ВС ниже безопасной высоты, отклонение ВС от линии курса и глиссады при заходе на посадку; вход ВС в зоны опасных метеоявлений и при среднесрочном прогнозе (на время до 30 минут) выявляют: конфликтные ситуации между ВС, вход ВС в зоны ограничения ИВП, снижение ВС ниже безопасной высоты, вход ВС в зоны опасных метеоявлений и выдают информацию о конфликтных ситуациях через выход 1 на вход 2 автоматизированного рабочего места диспетчера УВД 5. Блок организации потоков воздушного движения 13, используя информацию о планах полетов и зонах ограничений ИВП полученных с выходов 5 блока общей базы планов полетов 9 и выхода 6 блока общей базы аэронавигационных данных 10 через выход 10 модуля общих баз данных 3 и вход 3 модуля КСА УВД 2 на вход 2, анализируют возможность перераспределения воздушного трафика по разным воздушным трассам и маршрутам, секторам управления, учитывая потенциально опасные ситуации, зоны ограничений, пропускную способность секторов УВД, включая соседние центры, с учетом прогнозируемой метеорологической информации, вырабатывают рекомендации по безопасному использованию воздушного пространства, рассчитывают нагрузку на элементы воздушного пространства и посылают результаты расчетов через выход 1 на вход 3 автоматизированного рабочего места диспетчера планирования 12. Автоматизированное рабочее место диспетчера УВД 5 отображает всю информацию о фактической воздушной обстановке, полученной от блока обработки данных наблюдения 8, конфликтных ситуаций, полученных от блока контроля безопасности воздушного движения 6, а также информацию о планах полетов и аэронавигационных данных полученную на вход 3 через вход 1 модуля КСА УВД 2 с выходов 1 блока общей базы планов полетов 9 и 1 блока общей базы аэронавигационных данных 10 через выход 1 модуля общих баз данных 3 с целью выработки диспетчером УВД: команд для управления ВС, очередности прилета и вылета для нескольких аэропортов, основываясь на планируемой и фактической воздушной обстановки, на результатах контроля безопасности воздушного движения, на параметрах ВВП аэродромов назначения/вылета, всей информации о фактическом использовании воздушного пространства. Автоматизированное рабочее место диспетчера планирования 12 отображает информацию, полученную от блока организации потоков воздушного движения 13, а также информацию о планах полетов и аэронавигационных данных, полученные на вход 2 через вход 2 модуля КСА УВД 2 с выходов 4 блока общей базы планов полетов 9 и 5 блока общей базы аэронавигационных данных 10 через 8 выход модуля общих баз данных 3 с целью выработки диспетчером планирования соответствующих решений повышающих пропускную способность ВП.
Таким образом, за счет нового устройства управления воздушным движением, предложенного авторами, решена поставленная техническая задача повышения безопасности полетов и эффективности использования ВП.
Устройство может быть реализовано с использованием таких аппаратных средств как двухпроцессорные серверы типа ProLiant DL380 и рабочие станции Z2/Z6/Z8 производства Hewlett Packard Enterprise или аналогичных моделях других производителей. Сетевая архитектура может строиться с использованием управляемых сетевых концентраторов типа Aruba 2930 и Aruba 2530 производства Hewlett Packard Enterprise или аналогичных моделях других производителей. В качестве индикаторов диспетчерских рабочих мест могут быть использованы профессиональные мониторы высокого разрешения типа Raptor RP4325, Raptor SQ2825 производства компании EIZO или аналогичные модели других производителей. В качестве средств размещения оборудования могут использоваться 19-ти дюймовые монтажные шкафы производства Hewlett Packard Enterprise или других производителей высотой 27U, 32U и 42U.
Как показал проведенный заявителем информационный поиск, из уровня техники не известны способы и устройства с перечисленной совокупностью существенных признаков, то есть, заявляемые способ и устройство с учетом зависимых пунктов формулы обладают новизной в сравнении с прототипом, отличаясь от него тем, что:
1. Создают общие базы данных как для ПИВП, так и для УВД, доступ к которым имеют все пользователи ПИВП и УВД.
2. Производят вычисление траектории ВС в 4-мерном (3D геодезические координаты + 1D время) пространстве в масштабах всей Земли с учетом отечественных и международных математических моделей Земли (П3-90.11, WGS-84) в блоке, общем для ПИВП и УВД, визуализацию на пультах диспетчеров УВД и ПИВП данных траекторий на протяжении всего полета ВС из общих модулей баз данных. Это приводит к однозначной трактовке диспетчерами траектории полета ВС и к исключению ошибок в принятии управленческого решения, что увеличивает безопасность полетов.
3. Обрабатывают всю полученную информацию в геоцентрической 3-мерной геодезической системе координат с использованием математических моделей Земли ПЗ.90.11 и/или WGS-84, а также с учетом всемирного координированного времени (UTC), что повышает диапазон (географический) действия системы управления ВС, что позволяет контролировать воздушную обстановку практически по всему земному шару.
4. При экстраполяции местоположения ВС с использованием нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели, используют информацию о параметрах траектории ВС полученную, непосредственно с борта ВС (путевая и приборная скорости, путевые углы и курсы, числа МВС), что существенно повышает точность определения местоположения ВС, его скорости и курса.
5. При выявлении краткосрочных конфликтов используют цифровую карту местности что ведет к повышению безопасности полетов и более эффективному использованию ВП.
6. При выявлении среднесрочных конфликтов наряду с контролем нарушения норм эшелонирования между ВС и входом в зоны ограничения использования ВП контролируют снижение ниже минимальной безопасной высоты и возможность входа ВС в зоны опасных явлений погоды, что увеличивает безопасность полета ВС.
7. При анализе безопасности воздушного движения контролируют ошибочные действия пилота ВС по установке заданной высоты на задатчике высоты ВС воздушного судна, что увеличивает точность управления ВС по командам диспетчера УВД и безопасность его полета.
8. устройство УВД существенно упрощено за счет создания модуля общих баз данных, единого модуля вычисления траектории полета ВС и новой организации связей внутри КСА ПИВП и КСА УВД, обеспечивающей доступ всем пользователям КСА ПИВП и КСА УВД к модулю общих баз данных.
Заявляемые способ и устройство может быть реализовано с применением современного оборудования и технологий и может найти широкое применение при управлении воздушным движением, поэтому соответствует критерию промышленной применимости.
Соответствие изобретательскому уровню подтверждается результатами анализа аналогов и прототипа. Авторам не известны способ и устройство для его реализации, обладающие совокупностью существенных признаков предложенного способа управления воздушным движением и устройства для его реализации.
Литература.
1 ЛЕМЗ АС ОрВД «Топаз»ЛЕМЗ РФ
https://lemz.ru/%D1%82%D0%BE%D0%BF%D0%B0%D0%B7-10/
2. Фирма НИТА РФ КСА УВД «Альфа»
http://www.nita.ru/product/%d0%ba%d1%81%d0%b0-%d1%83%d0%b2%d0%b4-%d0%b0%d0%bb%d1%8c%d1%84%d0%b0/
3 Фирма НИТА РФ КСА ПИВП РФ «Планета»
http://www.nita.ru/product/%d0%ba%d1%81%d0%b0-%d0%bf%d0%b8%d0%b2%d0%bf-%d0%bf%d0%bb%d0%b0%d0%bd%d0%b5%d1%82%d0%b0/
4.ВНИИРА РФ КСА УВД «Синтез»
http://www.vniira.ru/ru/products/806/817/1181?text=basic-purpose
5. ВНИИРА КСА ПИВП «Синтез»
http://www.vniira.ru/ru/products/806/818/1182?text=basic-purpose
6. Патент на изобретение RU №2236707.
7. Патент на изобретение RU №2134910.
8. Патент на изобретение RU №2662321.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система координирования и контроля полетов государственной авиации по использованию воздушного пространства | 2023 |
|
RU2838621C2 |
| Способ авиационного наблюдения и устройство для его осуществления | 2023 |
|
RU2808467C1 |
| Способ управления потоком взлетов и посадок летательных аппаратов и устройство для его осуществления | 2022 |
|
RU2788101C1 |
| Способ и устройство предотвращения опасного сближения воздушных судов с использованием параллельного смещения | 2022 |
|
RU2785811C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов | 2017 |
|
RU2668145C1 |


Группа изобретений относится к способу и устройству для управления воздушным движением. Для управления воздушным движением получают из внешних источников: планы полетов, аэронавигационные данные параметров воздушных судов, которые загружают в базы данных, производят обработку данных определенным образом, предоставляют необходимую информацию на рабочие места диспетчеров, создают общие базы данных, загружают в них информацию из внешних источников. Устройство содержит модуль комплекса средств автоматизации планирования (модуль планирования), модуль управления воздушным движением (модуль управления), модули соответствующих баз данных. Модуль планирования включает: автоматизированное рабочее место диспетчера планирования, блок организации потоков воздушного движения, блок первичной обработки плановой информации, а модуль управления включает: автоматизированное рабочее место диспетчера, блок контроля безопасности воздушного движения, блок обработки плановой информации, блок обработки данных наблюдения, а каждый из модулей баз данных состоит из блока базы аэронавигационных данных, блока базы планов полетов, блока базы аэродинамических параметров воздушных судов. Обеспечивается повышение безопасности полетов и пропускной способности воздушного пространства. 2 н. и 5 з,п. ф-лы, 5 ил.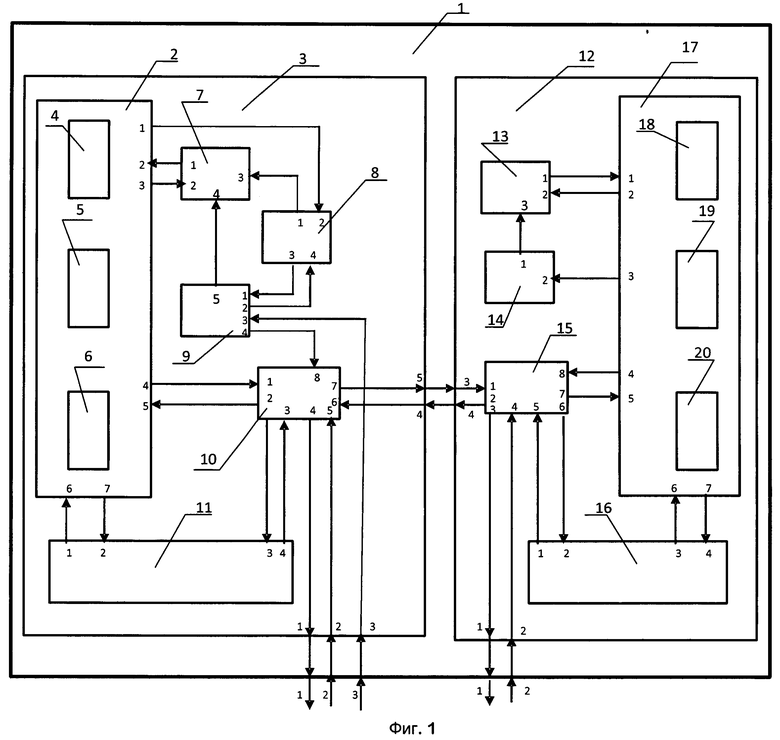
1. Способ управления воздушным движением, для реализации которого создают стратегические, предтактические и тактические планы использования воздушного пространства с помощью комплекса средств автоматизации планирования использования воздушного пространства и осуществляют предтактическое и тактическое управление воздушным движением с помощью комплекса средств автоматизации управления воздушным движением, для чего получают из внешних источников: планы полетов, аэронавигационные данные, параметров воздушных судов, которые загружают в базы данных отдельно для комплекса средств автоматизации планирования использования воздушного пространства и отдельно для комплекса средств автоматизации планирования использования воздушного пространства, производят обработку данных в вычислительных средствах обоих комплексов, вычисляют 4-мерные (3D геоцентрические + 1D время) траектории движения воздушного судна в масштабах зоны ответственности отдельно в каждом из комплексов и предоставляют необходимую информацию на рабочие места диспетчеров обоих комплексов, при этом базы данных каждого из комплексов обеспечивают информацией только своих потребителей, отличающийся тем, что создают общие базы данных, загружают в них информацию из внешних источников: планы полетов, аэронавигационные данные, параметров воздушных судов, доступ к которой имеют потребители обоих комплексов, вычисляют единую 4-мерную (3D геоцентрические + 1D время) траекторию воздушного судна в масштабах зоны ответственности, исключают ряд пересылок обработанных данных внутри каждого из комплексов, так как информация хранится в одной общей базе данных и доступна потребителям обоих комплексов, и передают ее на рабочие места диспетчеров обоих комплексов из одной общей базы данных.
2. Способ по п. 1, отличающийся тем, что обрабатывается вся полученная информация в геоцентрической 3-мерной геодезической системе координат с использованием математических моделей Земли ПЗ.90.11 и/или WGS-84, а также с учетом всемирного координированного времени (UTC), что повышает диапазон (географический) действия системы управления воздушным движением и позволяет контролировать воздушную обстановку практически по всему земному шару.
3. Способ по п. 1, отличающийся тем, что при экстраполяции местоположения воздушного судна с использованием нескольких фильтров Калмана, переключаемых методом взаимодействующих моделей в зависимости от динамики цели, используется информация о параметрах траектории воздушного судна, полученная непосредственно с его борта (путевая и приборная скорости, путевые углы и курсы, числа МВС), что существенно повышает точность определения местоположения воздушного судна, его скорости и курса.
4. Способ по п. 1, отличающийся тем, что при выявлении краткосрочных конфликтов используется цифровая карта высот подстилающей поверхности, что ведет к повышению безопасности полетов и более эффективному использованию воздушного пространства.
5. Способ по п. 1, отличающийся тем, что при выявлении среднесрочных конфликтов наряду с контролем нарушения норм эшелонирования между воздушными судами и входом в зоны ограничения использования воздушного пространства контролируется снижение ниже минимальной безопасной высоты и возможность входа воздушного судна в зоны опасных метеорологических явлений, что увеличивает безопасность полета воздушного судна.
6. Способ по п. 1, отличающийся тем, что при анализе безопасности воздушного движения контролируются неверные действия пилота воздушного судна по установке заданной высоты на задатчике высоты воздушного судна, что увеличивает точность управления воздушным судном по командам диспетчера управления воздушным движением и безопасность его полета.
7. Устройство для управления воздушным движением включает модуль комплекса средств автоматизации планирования использования воздушного пространства, модуль комплекса средств автоматизации управления воздушным движением, модуль баз данных для комплекса средств автоматизации планирования использования воздушного пространства и модуль баз данных для комплекса средств автоматизации управления воздушным движением, первый блок построения 4D-траектории ВС воздушного судна для модуля комплекса средств автоматизации управления воздушным, второй блок построения 4D-траектории воздушного судна для модуля комплекса средств автоматизации планирования использования воздушного пространства, а модуль комплекса средств автоматизации планирования использования воздушного пространства включает: автоматизированное рабочее место диспетчера планирования, блок организации потоков воздушного движения, блок первичной обработки плановой информации для комплекса средств автоматизации планирования использования воздушного пространства, а модуль комплекса средств автоматизации управления воздушным движением включает: автоматизированное рабочее место диспетчера управления воздушным движением, блок контроля безопасности воздушного движения, блок обработки плановой информации, блок обработки данных наблюдения для комплекса средств автоматизации управления воздушным движением, а каждый из модулей баз данных состоит из блока базы аэронавигационных данных, блока базы планов полетов, блока базы аэродинамических параметров воздушных судов, при этом связь между блоками и модулями организована так, что модуль комплекса средств автоматизации управления воздушным движением и модуль комплекса автоматизации планирования использования воздушного пространства получают информацию из своих баз данных и независимо вычисляют траекторию полета воздушного судна в первом и соответственно во втором блоках построения 4D-траектории воздушного судна, информацию о которой передают на соответствующие рабочие места диспетчеров обоих модулей, отличающееся тем что в устройстве применяют один модуль общих баз данных, состоящий из блока общей базы аэронавигационных данных, блока общей базы планов полетов и блока общей базы аэродинамических параметров воздушных судов, и один общий блок построения 4D-траектории воздушного судна, а связи внутри обоих модулей организованы таким образом, что оба модуля используют общие базы данных в течение всего жизненного цикла плана полета воздушного судна и одну и ту же его траектория полета, вычисленную в общем блоке построения 4D-траектории воздушного судна.
| RU 2007124379 A, 10.01.2009 | |||
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| ФОРМИРОВАНИЕ ОПИСАНИЯ ПЛАНОВОЙ СХЕМЫ ПОВЕДЕНИЯ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2677833C2 |
| ЕА 201500389 А1, 30.09.2016 | |||
| WO 2002099769 A1, 12.12.2002. | |||

