Изобретение относится к способам и устройствам измерения и контроля веса сыпучего груза, преимущественно балласта, дозированно выгружаемого из транспортного средства и высоты его укладки на поверхности железнодорожного пути, контроля технологических операций при производстве путевых работ, и может быть использовано при взвешивании грузовых вагонов, контроля за постановкой вагонов в состав поезда и оптимизации расходования сыпучего груза.
На железнодорожном транспорте потребность в дозированной выгрузке сыпучего груза возникает при строительстве, ремонтах и техническом обслуживании железнодорожного пути, при укладке или замене балластного, обычно щебеночного, слоя. Для выгрузки и укладки на путь балласта применяется специальный подвижной состав, а именно вагон грузового типа хоппер-дозатор, с разгрузочно-дозирующими механизмами, обеспечивающими прерывистую (RU 2180888, заявка 2000124747/28, 29.09.2000) выгрузку балласта из разгрузочных отверстий кузова, и разравнивание балласта на устанавливаемой технологическими процессами путевых работ высоте, определяющей толщину укладки балластного слоя, при этом кузов установлен на опорную раму, опирающуюся через совокупность упругих элементов, обеспечивающих рессорное подвешивание кузова и опорной рамы, на колесные пары ходовых тележек (Рессорное подвешивание // Железнодорожный транспорт: Энциклопедия / Гл. ред. Н.С. Конарев. - М.: Большая российская энциклопедия, 1994.- С.375. - ISBN 5-85270-115-7)), перемещающих подвижной состав по рельсам при транспортировании или производстве путевых работ, в частности выгрузки и распределения балласта по пути. Выгрузка и дозирование балласта осуществляется механическим перемещением вручную рукоятки управления приводом разгрузочно-дозирующих устройств, а объем выгруженного балласта оценивается визуально, по субъективной оценке производителя путевых работ, осматривающего остатки груза в кузове. Осмотр остатков груза в кузове сопряжен с повышенной опасностью, так как производителю работ приходится подниматься на значительную высоту по лестнице, чтобы заглянуть в кузов, при этом производство путевых работ прекращается. Разгрузочно-дозирующий механизм представляет собой систему крышек, перекрывающих разгрузочные отверстия, размещенные в нижней части кузова, как правило, оканчивающегося бункером и дозатор, содержащий подвижную, перемещаемую по высоте раму, с возможностью фиксации ее расположения по высоте с помощью винтового фиксатора в виде штурвала, связанной со шкалой дозирования. Привод разгрузочно - дозирующих механизмов состоит из силовых цилиндров и кинематически связанных с ним, рычагов, тяг, подвесок (Сычев В.П. Хоппер-дозаторы М.: АИСнТ 2011, 126 С). Уровень укладки балласта на путь, значения которого определены требованиями технологического процесса, устанавливается перемещением рамы дозатора по высоте и последующим ее закреплением на заданной высоте от уровня головки рельсов. Точность дозирования определяется требованиями технологии производства путевых работ. В процессе эксплуатации, закрепленная на заданном технологическим процессом уровне, высота дозатора над уровнем головки рельса, может не стать не соответствующей нормативному значению уровня укладки балласта по причинам износа разгрузочно-дозирующих механизмов или из за упругой характеристики рессорного подвешивания подвижного состава, параметром которой является его жесткость, которая показывает величину нагрузки в кН, вызывающей статический прогиб в 1 м. Рессорное подвешивание подвижного состава представляет собой систему упругих механических элементов, предназначенных для регулирования колебаний кузова транспортного средства и смягчения ударных нагрузок. Нагрузка на колесные пары передается через рессоры. Нагруженный подвижной состав проседает на величину, зависящую от жесткости рессорного подвешивания, а в процессе выгрузки балласта восстанавливается до первоначального состояния, которое было при порожнем подвижном составе (см. ТУ 3183-002-52398439-03 - Технические условия на хоппер-дозатор ВПМ 770). Однако, если колесные пары изношены, то эти размеры выходят за допустимые пределы, что может привести к нарушению безопасной эксплуатации подвижного состава.
Требования к порционной выгрузке балласта определяются технологическими процессами текущего содержания и ремонтов железнодорожного пути по устранению отдельных отступлений от норм содержания пути, например, вызванных так называемыми «выплесками», устраняемыми вырезкой загрязненного и подсыпкой чистого балласта в места выявленных отступлений или досыпкой уплотненного в процессе эксплуатации балласта в пространство внутри рельсовой колеи в так называемые «шпальные ящики», в которых балласт в процессе эксплуатации слеживается и верхняя поверхность балластной призмы относительно верхней поверхности, называемой постелью шпалы меняется и выходит за нормативно установленные значения (Инструкция по текущему содержанию железнодорожного пути. Распоряжение ОАО РЖД №2288 р от 14.11.2016).
Таким образом, контроль за соблюдением требований технологического процесса путевых работ по дозированной выгрузке и укладки балласта на железнодорожный путь подразумевает необходимость получения объективной оценки объема или веса, порционно выгружаемого балласта и уровня его укладки на путь и обеспечивает соблюдение режима экономии балласта и повышение уровня безопасности движения, так как постановка не полностью выгруженного вагона в поезд может привести к нарушению динамических характеристик состава поезда, до вероятности возникновения аварии, особенно при торможении.
Визуально объем сыпучего груза, остающегося после порционной выгрузки в кузове, проще оценивать как количественную характеристику пространства, занимаемого балластом в кузове или выгружаемой на путь порции, однако эффективнее для решения ряда задач ресурсосбережения и безопасности оценивать вес сыпучего груза, который как известно, связан с объемом через плотность груза.
Известен способ взвешивания на вагонных электронных весах для оценки безопасности движения вагонов с сыпучими грузами (RU 2 212 636, заявка 2001120300/28, 2001.07.19)
Способ включает поколесное измерение массы брутто движущегося вагона с последующим вычитанием из нее массы нетто вагона и определением массы груза в вагоне, что позволяет обеспечивать безопасность движения при постановке вагона в состав поезда, но не позволяет определить объем дозированной выгрузки балласта при производстве путевых работ в силу отсутствия технологической возможности применения электронных весов в процессе производства путевых работ. Этот недостаток частично устраняется предложением встроенной системы взвешивания железнодорожных товарных вагонов (RU 2 600 420, заявка 2015103058/11. 2015.01.30), которая состоит из устанавливаемых на элементы ходовых тележек грузового вагона, в частности, надрессорную балку или рамную боковину множества измерительных преобразователей с упругими элементами, преимущественно тензодатчиками с возможностью механически усиливать деформацию надрессорной балки или рамной боковины, и сбора, обработки и передачи обработанных данных о весе кузова, полученных с измерительных преобразователей в приемник.
Недостатком этого предложения является сложность и трудоемкость в эксплуатации системы, состоящей из тензодатчиков, сенсорных элементов и других элементов чувствительных к пыли и ударам частиц щебня, неизбежно попадающих при выгрузке потока щебня между ходовыми тележками и при его перемещении вдоль пути в процессе распределения балласта, при этом увеличивается трудоемкость в обслуживании, так как конструктивные особенности разгрузочно-дозирующих устройств и их привода, устанавливаемых в непосредственной близости от ходовых тележек, ограничивают доступ к элементам, что не обеспечивает ремонтопригодность системы при эксплуатации хоппер-дозатора.
Таким образом, цель изобретения, получать данные о весе выгружаемой из специального подвижного состава, например хоппер-дозатора, порции груза, уровня его распределения, контроля за его расходованием в соответствии с нормативными или рассчитанными значениями. Получение этих данных должно осуществляться в процессе производства работ по выгрузке и распределению груза, преимущественно, балласта при его распределении на железнодорожном пути при строительстве, ремонте и техническом обслуживании без необходимости останавливать процесс производства путевых работ и ставить подвижной состав в специально оборудованное место, например на весы. При этом система контроля за технологическими параметрами дозирования балласта, должна быть проста в эксплуатации, в обслуживании и ремонте.
Техническим результатом изобретения является обеспечение получения оперативных данных о весе порции груза, преимущественно балласта, выгружаемого из специального подвижного состава и уровня его распределения на железнодорожном пути, в частности при производстве путевых работ с контролем за выполнением нормативных или технологически обоснованных параметров выгрузки, а также повышение безопасности движения за счет своевременного выявления полупорожних вагонов, включаемых в состав поезда, нарушающих динамические показатели поездов и оперативной оценки износа колесных пар, при этом неисправности системы, возникающие в процессе эксплуатации должны быть обеспечены возможностью замены одного модуля системы на другой.
Технический результат достигается тем, что после i-ой и i+1-ой выгрузок измеряются расстояний Hi и Hi+1 от подрессоренной части подвижного состава до неподвижной по отношению к ней неподрессоренной части подвижного состава или поверхности железнодорожного пути преимущественно его элементов: рельса, шпалы, поверхности балластной призмы и вычисляется вес выгружаемой порции груза Мп по разности измеряемых до одного из элементов железнодорожного пути, умноженной на жесткость Kн рессорного подвешивания транспортного средства, а именно:

При этом на подвижной состав устанавливается система, состоящая из модулей измерения, преобразования, вычисления, отображения, размещенных в один или разные корпуса, при этом по меньшей мере один модуль устанавливается на подрессоренную часть подвижного состава таким образом, чтобы линия, соединяющая модуль с неподвижным по отношению к подрессоренной части подвижного состава элементом, не пересекала ни один элемент подвижного состава, обеспечивая измерение расстояния между подрессоренной части подвижного состава и неподвижной по отношению к ней неподрессоренной части или поверхности железнодорожного пути до и после выгрузки груза, а вычислительный модуль содержал блоки: вычисления разности измеренных расстояний, веса выгруженной порции груза, как произведения этой разности на жесткость рессорного подвешивания и сравнения с заданными параметрами. При этом в качестве элементов поверхности железнодорожного пути относительно которой измеряются расстояния, предпочтительно выбрать рельс, шпалу и поверхность балластной призмы.
Индивидуальный показатель жесткости специального подвижного состава может отличаться от известного показателя из нормативно-технической документации за счет эксплуатационного износа элементов рессорного подвешивания, поэтому для повышения точности расчетов допускается рассчитывать индивидуальную жесткость рессорного подвешивания вагона Кэ по формуле:

где: Мг - вес груза, который может быть получен из сопроводительных документах на груз или рассчитан путем взвешивания порожнего и груженного вагонов с определением разности значений взвешивания; Н0 - высота от выбранной метки на транспортном средстве до горизонтальной плоскости, совпадающей или параллельной плоскости железнодорожного пути при порожнем транспортном средстве перед погрузкой; Нз тоже, но при полной загрузке.
Модуль может быть установлен на раме подвижного состава, автосцепке, торцевой стене вагона, однако эффективнее разместить модуль на кронштейне, который закрепить на любой подрессоренной части подвижного состава с возможностью поворота кронштейна. Модуль (модули) целесообразно разместить в антивандальном корпусе, который устанавливается с возможностью демонтажа, обеспечивая тем самым ремонтопригодность в процессе эксплуатации системы посредством замены неисправного модуля на исправный.
Установка модулей на автосцепках позволяет решить вспомогательную задачу, а именно, оценить износ колесной пары путем сравнения получаемых измерений с нормативно-техническими характеристиками подвижного состава и требованиям безопасной эксплуатации транспортного средства. Если устанавливается несколько модулей, то вначале вычисляется среднее значение Н от разных модулей, которое в дальнейшем используется в вычислениях, в частности в формуле (1). Установка нескольких модулей, разнесенных относительно друг друга на максимально возможное расстояние, и вычисление среднего расстояния от расстояний, измеренных разными модулями, повысит точность расчета веса выгружаемого балласта, и позволит решить вспомогательную задачу, оценить смещение сыпучего груза в кузове по разности измеренных расстояний от разных модулей.
В том случае, если разгрузочно-дозирующие устройства имеют дозатор, состоящий из поперечных и продольных балок, перемещаемый по высоте с целью регулирования уровня укладки допускается установка модуля над головкой рельсов под продольной надрельсовой балкой, что в том числе позволяет решить задачу контроля соответствия установки дозатора требуемым параметрам высоты укладки.
Измерительная информация должна быть сохранена и отражена на информационной панели, а по завершению путевых работ целесообразно передавать ее в электронном виде по каналам связи или посредством записи на внешние носители, в том числе бумажном виде для оценки руководителями работ и подразделений обоснованности расходования балласта и планирования путевых работ.
Модуль измерения может содержать датчик перемещения, гироскопное устройство, линейку для измерения расстояний, устанавливаемая вертикально к плоскости железнодорожного пути относительно выбранной метки на транспортном средстве. Использование мерной линейки технически реализуется следующим образом, на подвижном составе, предпочтительно раме устанавливается направляющая по которой перемещается линейка, а торцевой стене устанавливается шкала с отметками. После выгрузки порции груза линейка перемещается до упора с поверхностью железнодорожного пути и измеренная высота сравнивается со шкалой с отметками, установленной на торцевой стене специального подвижного состава или второй мерной линейкой жестко установленной на раме, и определяется разность расстояний после предыдущей и текущей выгрузок. Предпочтительно, если модуль измерения будет выполнен, например, как излучатель, генерирующий посыл сигнала на неподвижную относительно специального подвижного состава плоскость, например головку рельса и содержать приемник, принимающий отраженный от поверхности сигнал.
Одним из вариантов может быть установка излучателя таким образом, чтобы посыл сигнала шел в горизонтальной плоскости и попадал на устройство измеряющее расстояние до поверхности железнодорожного пути, в самом простом виде, мерную линейку устанавливаемую вертикально на балласт железнодорожного пути или головку рельса производителем путевых работ.
Модуль измерения, содержащий датчик перемещения будет установлен на кузов и настроен на горизонтальную плоскость, проходящую через неподрессоренную часть подвижного состава, например, ось колесной пары, или на горизонтальную плоскость, касающуюся элемента железнодорожного пути, например, головки рельса или поверхности балластной призмы.
Как вариант, модуль измерения, содержащий датчик перемещения может быть настроен на вертикальную плоскость мерной линейки, устанавливаемой на поверхность железнодорожного пути.
Важным требованием к системе является отсутствие помехи между точками, в которых устанавливается измерительный модуль и точкой на плоскости железнодорожного пути относительно которой производится измерение расстояния, в частном случае, между излучателем сигнала и отражателем.
Преобразование сигнала, получаемого измерительным модулем в цифровую или иную форму, удобную для восприятия и обработки осуществляется с помощью модулей преобразования: первичных, промежуточных, передающих и иных преобразователей.
Отображение информации возможно на дисплее, или ином средстве отображения, в том числе в печатном виде и индикация сигнала на пультах управления разгрузочно-дозирующими устройствами. Эффективнее для оперативного регулирования разгрузочно-дозирующими механизмами, если модуль отображения будет совмещен с панелью устройства регулирования разгрузочно-дозирующего механизма.
Вычислительный модуль может быть размещен как на транспортном средстве, так вне его, например, использовано типовое вычислительное устройство типа ноутбук. При этом вычислительный модуль должен содержать: блок вычисления текущей разности измеряемых расстояний после текущей выгрузки порции балласта Hi+i и предшествующей Hi (Hi+i- Hi) и связанный с ним блок вычисления веса выгруженной порции груза, как произведения разности измеренных значений на известную жесткость рессорного подвешивания по формуле (1).
Показатель жесткости рессорного подвешивания подвижного состава известен из нормативно-технических документов и вводится в вычислительный модуль как априорная информация.
Контроль за дозированием балласта осуществляется путем сравнения веса выгруженной порции балласта, определенный по формуле (1) с заданными технологическим процессом производства путевых работ значениями.
Работы с выгрузкой и укладкой балласта преимущественно выполняются в технологических процессах по выправке и рихтовке пути, замены вырезаемого загрязненного балласта на чистый, восстановления до строительных размеров очертаний балластной призмы, заполняемости шпальных ящиков и прочих в соответствии с требованиями нормативно-технических документов на строительство, ремонт и текущее содержание железнодорожного пути.
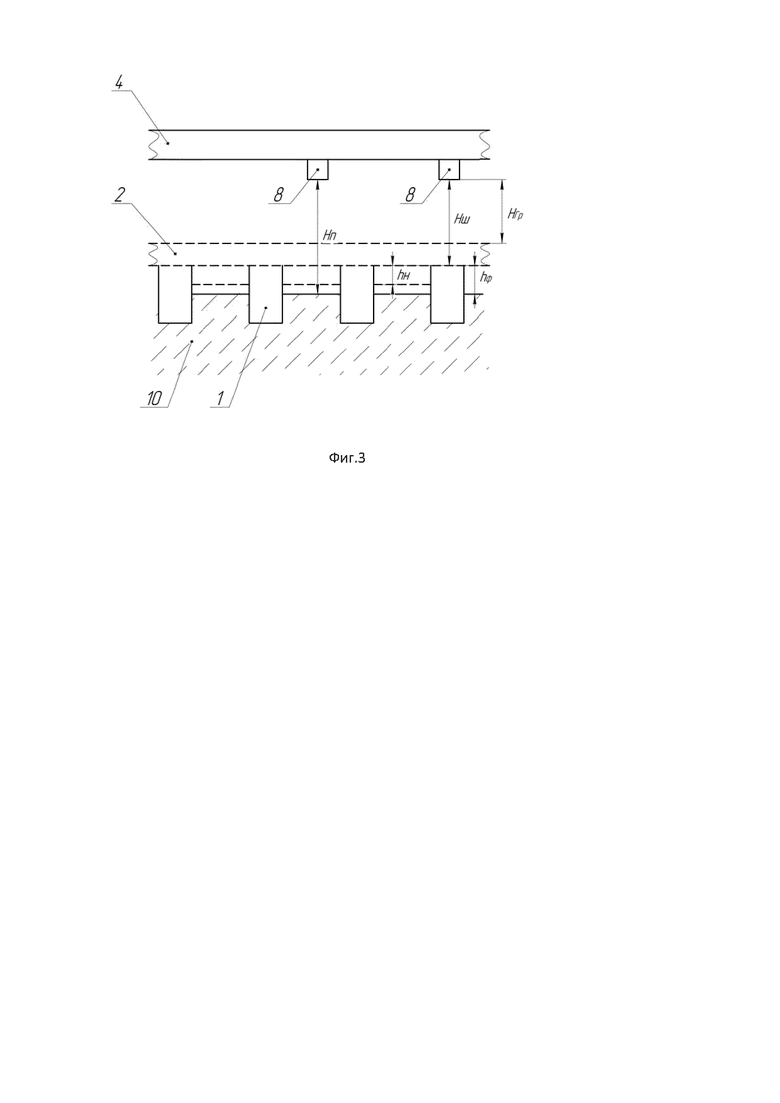
Заполняемость шпальных ящиков устанавливается по критерию достижения уровня верхней поверхности балластной призмы между шпалами до нормативной величины расстояния до верхней постели шпалы hН. Поэтому контроль заполняемости шпальных ящиков осуществляется по критерию достижения равенства фактически измеренного расстояния от верхней поверхности балластной призмы hф до установленной нормативными документами значения hH относительно постели шпалы, которые зависят от типа шпалы. hф можно получить по разности измеренных расстояний до верхней поверхности балластной призмы Нп и до верхней поверхности постели шпалы Нп

Принимаем обозначения: hp - высота рельса. А - расстояние между шпалами, В - расстояние между рельсами.
Зная А - расстояние между соседними шпалами, В расстояние между рельсами несложно посчитать объем потребного балласта для достижения нормативных значений уровня верхней поверхности балластной призмы:

Для решения задачи заполняемости балластом шпальных ящиков, по меньшей мере, один из модулей должен быть размещен над поверхностью балластной призмы. Допускается использовать модуль, размещенный над головками рельсов, повернув, кронштейн, на котором он закреплен внутрь колеи и продолжить измерение до поверхности балластной призмы или верхней поверхности шпалы. При этом Нш можно не измерять, а зная высоту рельса hp, несложно с долей погрешности, не существенной для контроля технологического процесса распределения балласта, оценить расстояние от транспортного средства до верхней постели шпалы Нш по формуле:

Таким образом hф будет:

Сравнивая hф с нормативным значением hH расстояния от верхней поверхности балластной призмы до верхней поверхности, называемой постелью, шпалы, заполняемость шпальных ящиков контролируется до достижения равенства hф=hH.
Объем балласта необходимый для восстановления очертаний балластной призмы согласно строительным параметрам, рассчитывается посредством сравнения измеренных расстояний до граней призмы и сравнения полученных в результате измерения значений с призмой, установленной при строительстве.
Система может работать и при движущемся подвижном составе, осуществляющим выгрузку и укладку балласта, однако динамические колебания транспортного средства при движении могут исказить результаты измерений, поэтому результаты измерения целесообразно фиксировать при технологических остановках подвижного состава. При этом остановка транспортного средства позволит провести промежуточное регулирование разгрузочно-дозирующих устройств.
По измеренным расстояниям до поверхности железнодорожного пути можно также оценить износ колесных пар, сравнив измеренное расстояние с допустимым при неизношенных колесных парах.
Модуль измерения может быть совмещен в одном корпусе с одним из других или со всеми модулями: приема, сбора, преобразования, обработки, вычисления, передачи, отображения информации. Информация из модуля вычисления должна передаваться в базу данных руководителя работ, например сформированную на переносном компьютере или стационарном автоматизированном рабочем месте руководителя. Передача информации может осуществляться с помощью спутниковой навигации, при этом подвижной состав целесообразно оборудовать датчиками его местоположения, что обеспечит включение системы в автоматизированную систему управления технологическими процессами ремонтов и текущего содержания железнодорожного пути.
Корпус модуля должен быть выполнен в антивандальном исполнении и устанавливаться на подвижной состав с возможностью демонтажа.
Модуль может быть установлен на кузове или любой другой подрессоренной части подвижного состава.
Для оперативного получения информации о возможности разрегулирования разгрузочно-дозирующих механизмов в процессе работ по дозированию балласта, один из модулей может быть установлен на подвижной раме дозатора, например на продольной надрельсовой балке.
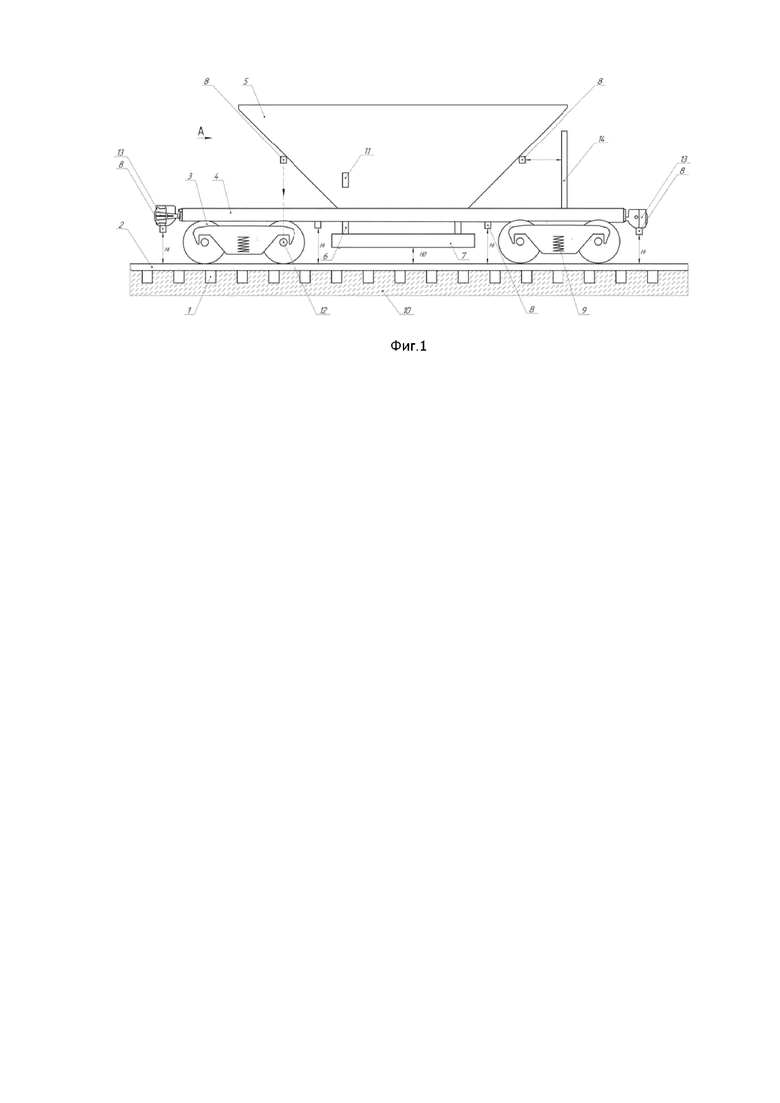
На фиг. 1 показан общий вид подвижного состава для выгрузки и распределения балласта на рельсовом пути с установленными модулями по разным вариантам измерения (от рамы, от оси автосцепки, от кузова, с помощью мерной линейки до головки рельса, оси колесной пары и т.д.). На фиг. 1 Нi - текущее измеряемое расстояние от подрессоренного элемента подвижного состава (в частности рамы) до поверхности железнодорожного пути (в частности уровня головки рельсов); Нд - высота рамы дозатора до уровня головки рельса;
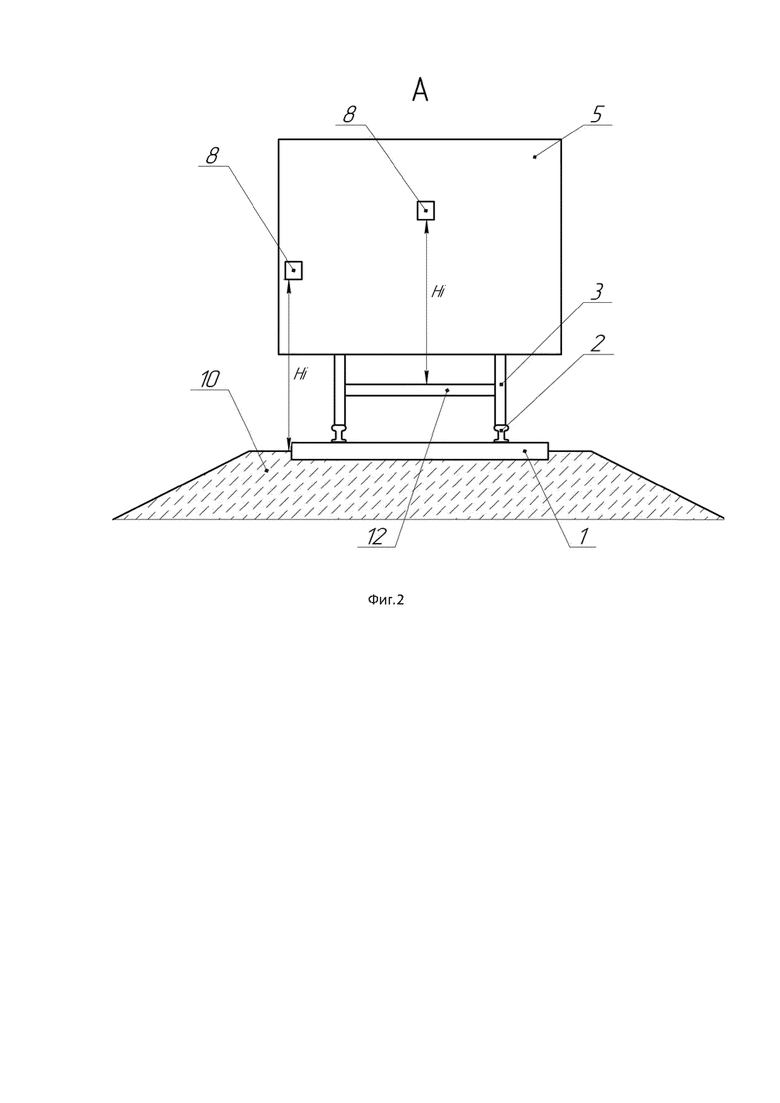
На фиг. 2 приведен вид А фиг. 1 со схемой размещения модулей измерения на торцевой стене подвижного состава. На фиг. 2 Нi - текущее измеряемое расстояние от подрессоренного элемента подвижного состава (в частности кузова) до неподрессоренной части подвижного состава (в частности оси колесной пары);
На фиг. 3 схема контроля за уровнем укладки и контроля заполняемостью шпальных ящиков. На фиг. 3 Нш - расстояние до верхней постели шпалы; Нп - расстояние до балластной призмы; Нф - расстояние до уровня головки рельса; hф - измеренная высота от балластной призмы до верхней постели шпалы, hH - высота от балластной призмы до верхней постели шпалы по нормативам.
На фигурах 1-3 указаны: 1 - шпала; 2 - рельс; 3 - колесная пара; 4 - рама подвижного состава; 5 - кузов; 6 - тяга (направляющая) рамы дозатора разгрузочно-дозирующего механизма; 7 - рама дозатора; 8 - измерительный модуль; 9 - комплект рессорного подвешивания; 10 - балластный слой(балластная призма), 11 - шкала дозирования; 12 - ось колесной пары; 13 - автосцепка; 14 - мерная линейка.
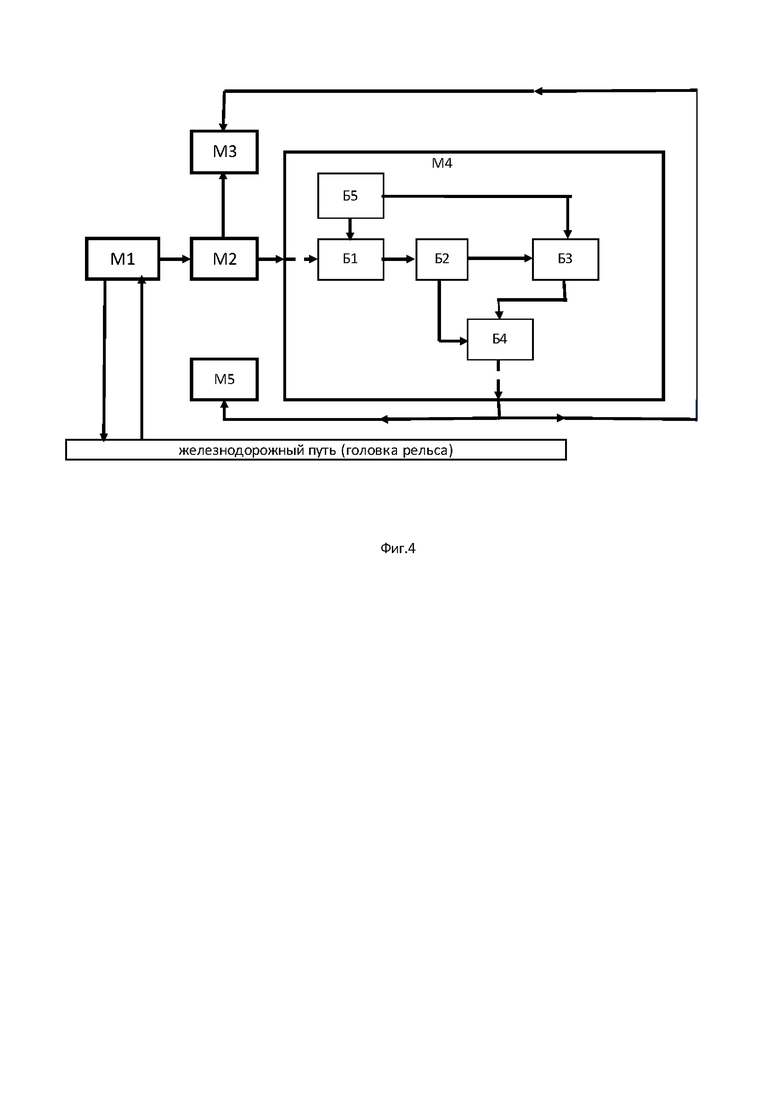
На фиг. 4 приведена схема взаимодействия модулей и блоков системы вычисления и контроля за выполнением нормативных значений укладки балласта. На фигуре 4 указаны:
М1 - модуль измерения; М2 - модуль преобразования; М3 - модуль отображения; М4 - модуль вычислительный; М 5- модуль управления разгрузочно-дозирующими механизмами. Б1 - блок хранения информации; Б2 - блок вычисления разности измеренных расстояний, Б3 - блок вычисления веса порции груза; Б4 - блок контроля технологических параметров дозирования; Б5 - блок априорной информации. Система на примере хоппер-дозатора работает следующим образом. Хоппер-дозатор подается на погрузку.
Система подключается к источнику питания. Включение системы может быть принудительно или автоматически, например после прерывания выгрузки порции балласта. Причем с целью экономии энергии аккумуляторных батарей после измерения система выключается и вновь включается после завершения выгрузки следующей порции балласта.
В блок априорной информации Б5 вводятся показатель жесткости рессорного подвешивания и технологические параметры дозирования в соответствии с требованиями технологических процессов производства путевых работ. Измерительный модуль M1 настраивается на неподвижный относительно подрессоренной части подвижного состава элемент поверхности железнодорожного пути (на головку рельса, верхнюю поверхность балластной призмы, верхней постели шпалы в зависимости от требований технологии путевых работ) или неподрессоренную часть подвижного состава, приемное устройство измерительного модуля получает измерительные сигналы от выбранного неподвижного элемента, которые поступают в модуль преобразования М2, и далее преобразованная измерительная информация поступает на модуль отображения М3, и в вычислительный модуль М4, в котором запоминается в блоке Б1 формирования и хранения измерительной информации, из которого передается в блок обработки Б2, в котором рассчитываются разности измеренных расстояний после текущей и предыдущей выгрузок порции балласта, решая ряд вспомогательных задач по расчету объема балласта, необходимого для заполнения шпальных ящиков согласно нормативным значениям, потребности балласта для восстановления очертаний балластной призмы строительным очертаниям, получаемым из блока априорной информации Б5, в который также предварительно заведена информация о жесткости рессорного подвешивания. Далее информация поступает блок Б3, в котором вычисляется вес выгружаемой порции балласта на основе разности измеренных расстояний, получаемых из Б2 и из Б5 априорной информации жесткости рессорного подвешивания. Информация из блоков Б2 и Б3 поступает в блок Б4 сравнения с установленными технологическими параметрами дозирования. В случае их несовпадения подается информация в модуль М5 управления разгрузочно-дозирующими механизмами и отображается в модуле отображения М3, который может быть совмещен с панелью шкалы дозирования 11 (фиг. 1), при этом регулирование разгрузочно-дозирующих механизмов может осуществляться как автоматически без участия человека на основе полученной информации, так и вручную производителем путевых работ.
Модуль измерения устанавливается на подвижном составе таким образом, что между модулем и точкой относительно которой происходят измерения, отсутствует препятствие, являющуюся помехой измерению.
Таким образом, способ и система контроля дозирования сыпучего груза, выгружаемого на железнодорожный путь из подвижного состава с известной жесткостью рессорного подвешивания, основанная на измерении расстояний от подрессоренной части подвижного состава до неподвижного относительно подрессоренной части элемента поверхности железнодорожного пути или неподрессоренной части подвижного состава до и после выгрузки порции груза, позволяет решать задачи технологического контроля за производством путевых работ, в том числе таких технологических операций как заполняемость шпальных ящиков, приведения очертаний рельсовых нитей и балластной призмы к нормативным параметрам их содержания; расходованием балласта строго по потребности технологического процесса; повысить безопасность транспортирования в составе поезда, провести оценку износа колесных пар.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения расстояния между подвижным составом, преимущественно хоппер-дозатором, и железнодорожным путем и способ установки высоты дозатора хоппер-дозатора | 2021 |
|
RU2779434C1 |
| Устройство контроля объема сыпучего груза, выгружаемого из вагона-хоппера | 2022 |
|
RU2801762C1 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| Способ контроля дозировки балласта и измерительно-управляющее устройство дозированной выгрузки и распределения балласта на железнодорожный путь | 2020 |
|
RU2755610C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| Хоппер-дозатор секционной разгрузки | 1961 |
|
SU151371A1 |
| Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь | 2020 |
|
RU2741683C1 |
| Способ передвижения | 2019 |
|
RU2719045C1 |
| ХОППЕР | 2008 |
|
RU2361758C1 |
| ХОППЕР-ДОЗАТОР | 2002 |
|
RU2221719C1 |
Изобретение относится к способам и устройствам контроля дозирования сыпучего груза. Предлагаемые способ и система измерения основаны на измерении расстояний между транспортным средством с известной жесткостью рессорного подвешивания, из которого балласт выгружается и плоскостью железнодорожного пути, вычисления веса выгружаемой порции груза по разности измеряемых после каждой выгрузки балласта, умноженной на жесткость рессорного подвешивания транспортного средства. В результате обеспечивается получение оперативных данных о весе порции груза, преимущественно балласта, выгружаемого из подвижного состава и уровня его распределения на железнодорожном пути. 2 н. и 8 з.п. ф-лы, 4 ил. 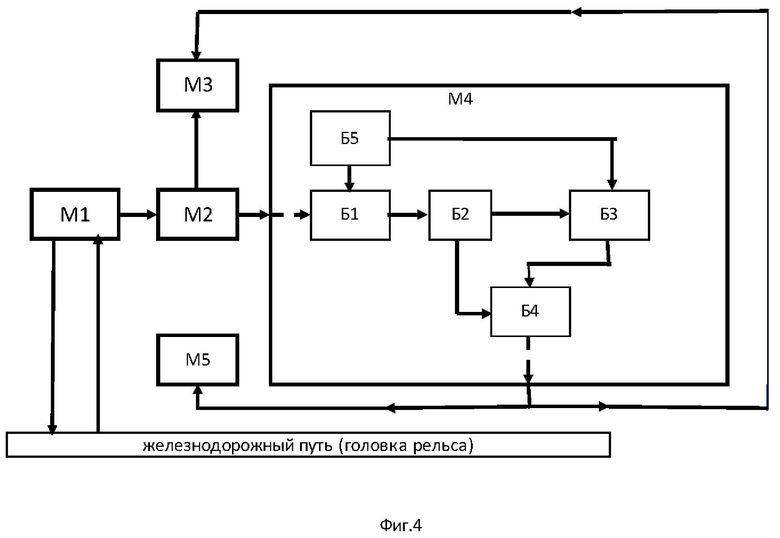
1. Способ контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из подвижного состава с известной жесткостью рессорного подвешивания, заключающийся в измерении расстояния между подрессоренной частью подвижного состава и неподвижного относительно этой части элемента верхнего строения пути или неподрессоренного элемента подвижного состава, при этом измерения проводятся до и после выгрузки порции балласта, вычисляется разность измерений и рассчитывается вес выгруженной порции как произведение разности измерений на жесткость рессорного подвешивания, и полученные значения сравниваются с заданными технологией работ параметрами веса и укладки груза на путь.
2. Система контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из подвижного состава с известной жесткостью рессорного подвешивания, содержащая кузов, установленный на раму, опирающуюся на ходовые тележки, разгрузочно-дозировочные механизмы, и множество связанных между собой модулей измерения, преобразования, вычисления, передачи и отображения, конструктивно объединенных в один или разные корпуса, при этом по меньшей мере один модуль установлен на подвижном составе, отличающаяся тем, что модуль размещен на подрессоренной части подвижного состава таким образом, что прямая, соединяющая модуль и неподвижный относительно подрессоренной части элемент верхнего строения пути или неподрессоренной части подвижного состава, не пересекается с никакой другой частью подвижного состава, а модуль вычислений содержит блоки вычисления разности измеренных расстояний между модулем и неподвижным элементом до и после выгрузки порции груза, веса выгруженной порции груза как произведение этой разности на жесткость рессорного подвешивания и сравнения с заданными параметрами.
3. Система по п. 2, отличающаяся тем, что модуль закреплен на подрессоренной части подвижного состава с помощью кронштейна с возможностью его перемещения.
4. Система по п. 2, отличающаяся тем, что по меньшей мере один модуль установлен на автосцепке.
5. Система по п. 2, отличающаяся тем, что по меньшей мере один модуль установлен в нижней части рамы над рельсом, при этом одна из точек размещена на установленной на поверхность верхнего строения пути, например рельсы, неподрессоренной части подвижного состава, например ось колесной пары.
6. Система по п. 2, отличающаяся тем, что по меньшей мере один модуль установлен на кузове.
7. Система по п. 2, отличающаяся тем, что разгрузочно-дозирующий механизм имеет дозатор, содержащий перемещаемую по высоте раму, при этом модуль установлен на этой раме.
8. Система по п. 2, отличающаяся тем, что модуль измерения содержит датчик перемещения, настроенный на неподрессоренную часть подвижного состава.
9. Система по п. 2, отличающаяся тем, что модуль измерения содержит излучатель, генерирующий посыл сигнала на неподвижный элемент и приемник сигнала, принимающий отраженный от него сигнал.
10. Система по п. 2 или 9, отличающаяся тем, что на подвижном составе установлена стойка, в которой закреплена мерная линейка, свободно перемещаемая до упора с неподвижным элементом, а излучатель генерирует посыл сигнала на эту мерную линейку.
| ХОППЕР-ДОЗАТОР | 2000 |
|
RU2180888C1 |
| МАШИНА ЛОКАЛЬНОЙ ВЫПРАВКИ ПУТИ | 2008 |
|
RU2378441C1 |
| Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь | 2020 |
|
RU2741683C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| FR 2912158 A1, 08.08.2008. | |||

