Описание
Изобретение относится к информационно управляющим комплексам и средствам автоматизации управления устройств по работе с балластом, рельсами и шпалами, лежащими на балласте при выполнении технологических процессов ремонта и текущего содержания железнодорожного пути при устранении выявленных в процессе измерения состояния пути отклонений геометрических параметров железнодорожного пути от задаваемых критериев его содержания, приведением их к требуемым критериям с оптимальным расходованием балласта и направлено на совершенствование операционной модели управления восстановлением и поддержанием работоспособности инфраструктуры железнодорожного транспорта.
Известно, что наибольший процент работ по техническому обслуживанию и ремонтам железнодорожного пути и в первую очередь текущего содержания пути, связан с балластом (Инструкция по текущему содержанию железнодорожного пути. Утв. распоряжением ОАО «РЖД» от 14 ноября 2016 г. No 2288р. – Москва, 2012. – 235 c.). При этом действующая технология работ с балластом, обеспечивающая поддержание и восстановление работоспособности железнодорожного пути, ориентирована на механическое перемещение балласта из грузовых вагонов типа хоппер-дозаторов в путь или с пути в виде так называемой «вырезки» балласта в местах загрязнения и появления неисправностей пути в виде «выплесков» (Технические условия на работы по ремонту и планово-предупредительной выправке пути/ ОАО «РЖД». – М.: ИКЦ «Академкнига», 2004. –183 с). Технология работ в этом случае может быть представлена в виде трех взаимосвязанных операций: измерение состояния пути; перемещение рельсовых нитей и/или шпал, например, при выправке, рихтовке, подъемки пути, регулировки стыковых зазоров посредством, переустановки (перегонке) шпал по новым отметкам или их удаление и т.д.; перемещение балласта, в частности, выгрузка, укладка, удаления излишков с уборкой загрязненного балласта с засорителями с поверхности балластной призмы и из-под подошвы рельсов, восстановление формы (оправка) балластной призмы, прогрохотка щебня в местах выплесков и т.п.
Известны (Научно-исследовательский отчет АО ВНИИЖТ, Шифр работы: 2.042.Р, договор No 1033/12/371, этап 1 «Анализ отечественных и зарубежных систем путеизмерения, действующей нормативно-технической документации по применению различных средств контроля технического состояния пути и использованию, получаемой информации») измерительные системы сплошного контроля рельсовой колеи, установленные на рельсовые транспортные средства, в частности путеизмерительные тележки и ручной путеизмеритель РПИ; вагоны-путеизмерители типа КВЛ-П и ЦНИИ-4 разных модификаций; дефектоскопно-путеизмерительные мотрисы; диагностические комплексы контроля инфраструктуры (ДКИ) «ЭРА» и «ИНТЕГРАЛ»; АИИС – автоматические путеизмерительные модули на подвижном составе (поезда Сапсан, Ласточка и др.); путеизмерители на грузовых локомотивах (ВЛ-11м, 2ТЭ116 и др.) – СПЛг для оценки деформативности пути. Измерительные системы выполняют процесс измерений геометрических параметров железнодорожного пути с целью выявления отступлений их от норм содержания пути и включают поиск места и определение причин неисправности (отказа). Причем под неисправностью понимаются отступления от норм или паспортных значений строительных параметров пути, которые негативно влияют на перевозочный процесс и считаются неисправностями железнодорожного пути, поскольку не обеспечивают выполнение критериев по безопасности движения. Технологический процесс по устранению выявленных неисправностей пути в плане, продольном профиле и по уровню включает в себя перемещение рельсовых нитей по уровню и в плане (выправка, рихтовка, подъемка) и подсыпка на путь или удаления с пути балласта с использованием соответствующих устройств, грузовых вагонов по перемещению балласта и путевых машин, в частности, выправочно-рихтовочных машин типа ВПР. Известна (Патент RU №2098538) путевая машина содержащая, опирающуюся на ходовые тележки раму, на которой смонтированы устройства для измерения стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого, устройство для управления выправкой пути, соединенное с устройствами для измерения, и выправочное устройство. Устройство для управления выправкой пути состоит из вычислительного блока, выполненного с возможностью определения смещений пути относительно неподвижных координат, определяющих положение пути в пространстве, датчика пути, блока ввода априорной информации и блока сравнения. При непрерывном перемещении машины при помощи датчиков измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого. В процессе выправки пути дополнительно измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого, а выправляют путь в соответствии с результатом сравнения величин дополнительно измеренных стрел и/или возвышения одного рельса относительно другого с соответствующими программными величинами. Недостатком этого изобретения является ограниченная область применения, выполнение путевой машиной одной функции – перемещения рельсовых нитей с отсутствием единой связи с системами выгрузки и укладки балласта в путь, который по сути фиксирует новое местоположение рельсовых нитей, обеспечивая также соответствующие упругие свойства балласта.
Известна [патент RU № 2196860] путевая машина, содержащая раму, опирающуюся на ходовые тележки, смонтированные на раме силовой агрегат, кабины с блоками управления перемещением и работой машины, устройство управления выправкой железнодорожного пути, выправочно-подбивочно-рихтовочное устройство, связанное с силовым агрегатом, и устройство для определения подсыпки балласта, смонтированное на раме, блок его управления, а также блок определения объема балласта, состоящий из соединенных между собой устройства для определения величин подъемок пути и блока сравнения, отличающаяся тем, что блок определения объема балласта снабжен устройством для определения величин сдвижек пути, а блок сравнения определяет объем, необходимый для подсыпки в путь балласта по изменению поперечной площади призмы при подъемке пути. Известен (патент РФ № 2180888) хоппер-дозатор, обеспечивающий прерывание выгрузки с порционным дозированием балласта в путь. Однако дозирование осуществляется оператором механически поворотом рычага на открытие крышки. Это решение не обеспечивает экономное расходование балласта, так как время открытия крышки и объем выгружаемого балласта оператор осуществляет «на глазок»; также при выгрузке балласта из группы вагонов во время технологического перерыва в движении на производство путевых работ теряется время на передвижение оператора вдоль состава из группы вагонов на последовательное открытие крышек.
Недостатком перечисленных выше систем является отсутствие общего между системами интерфейса и механический способ распределения балласта оператором устройства выгрузки балласта без расчета потребного объема, необходимого для приведения измеренного состояния железнодорожного пути к нормативным показателям его содержания с выполнением заданных критериев по безопасности движения. Поэтому не обеспечивается оптимальное расходование балласта, и требуется проведения дополнительных подготовительных работ и использование большого количества рабочих при производстве путевых работ, снижается качество выполнения работ. Также недостатком этого устройства является отсутствие оперативной и информационной связи с измерительной системой, определяющей наличие отступлений от норм содержания железнодорожного пути, не обеспечивающей возможность осуществлять коррективы в быстро меняющихся условиях производства путевых работ.
Таким образом разрозненно управляемые системы: измерения состояния железнодорожного пути, устройства перемещения балласта и путевые машины, осуществляющие выработку управляющих воздействий на путь снижают надежность принятия управляющих решений, производительность путевых работ на железнодорожном пути, сокращают время выполнения технологических перерывов в движении поездов, выделяемых для производства работ на железнодорожном пути, не дают возможность сократить работающих на непроизводительных операциях, объективно распределять балласт. Технический результат достигается созданием информационно-управляющей системы (ИУС) информационно и функционально объединяющей технические средства измерения состояния железнодорожного пути, распределения балласта на железнодорожный путь и выработки управляющих воздействий на путь с целью приведение показателей состояния рельсовой колеи к требуемым значениям, исключающим наличие отступлений от норм содержания пути, негативно, влияющим на перевозочный процесс. Информационно-управляющая система (ИУС), функционально содержит ряд производственных модулей, состоящих из различных устройств, выполняющих различные технологические операции с железнодорожным путем, в частности: восстановление балластной призмы до нормативных значений, постановка пути в проектное положение, уборка лишнего или загрязненного балласта и его замена на чистый балласт, устранения отступлений от норм содержания рельсовой колеи превышающих нормативные или критические значения, замены шпал, изменение радиуса кривой, смещение пути и т.д.
Таким образом, для достижения технического результата предлагается Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям, включающаяся в себя вычислительный комплекс, связанный сетью по каналам информационного обмена с системой обратной связи с установленными на раме транспортного средства производственными модулями, взаимодействующими с железнодорожным путем: модулем измерения геометрических очертаний балластной призмы и рельсовых нитей, устойчиво, лежащих на опорной поверхности балластной призмы на железнодорожных шпалах, уложенных на балласт, модулем выработки управляющих воздействий на перемещение балласта железнодорожного пути, модулем выработки управляющих воздействий на перемещение рельсовых нитей или/и шпал, с по меньшей мере с одним датчиком, определяющим местоположение системы и формирующим цифровую карту участка железнодорожного пути, взаимосвязанные через систему информационно управляемых блоков: блоком преобразования сигналов от измерительных механизмов, блоком сравнения измеренных величин с, задаваемыми блоком формирования и поддержания нормативно справочной информации, пороговыми значениями, блоком формирования информационной матрицы измеренных значений, не соответствующих пороговым значениям с ранжированием по числовым и качественным критериям, установленным нормативно-справочной информацией как неисправностей пути, подлежащих устранению и их местоположения, и связанным с ним блоками формирования матриц неисправностей, подлежащих устранению посредством предварительного перемещения рельсовых нитей и/или шпал с последующим перемещением балласта и матрицы неисправностей, подлежащих устранению посредством предварительного перемещения балласта с последующим перемещением рельсовых нитей и/или шпал; блоками расчета величин перемещений рельсовых нитей и/или шпал и расчета объема перемещаемого балласта двусторонне связанные между собой через коммутатор; блоками выработки управляющих воздействий на механизмы модуля перемещения балласта и выработки управляющих воздействий на механизмы модуля перемещения рельсовых нитей и/или шпал взаимодействующие между собой через коммутатор и блок контроля измененного положения рельсовых нитей и перемещенного объема балласта на соответствие заданным в блоке формирования и поддержания нормативно-справочной и задаваемой информации значениям. Коммутатор может быть выполнен как перекрестный переключатель с диодными ограничителями. Перемещение рельсовых нитей осуществляется совместно со шпалами, на которые рельсовые нити опираются, а модуль перемещения балласта содержит механизмы и устройства выгрузки и укладки балласта на железнодорожный путь, рыхления, уплотнения балласта, удаления балласта с железнодорожного пути. Производственные модули могут быть установлены на одну раму одного транспортного средства, на две и более рамы одного транспортного средства или на разные транспортные средства. При этом модули разделены по функциональному назначению, а именно: измерение, перемещение балласта, перемещение рельсов и/или шпал. В качестве примера, измерительным модулем может служить вагон-путеизмеритель, модулями перемещения балласта: вагон хоппер-дозатор, путевая машина для удаления выплесков, а модулем перемещения рельсовых нитей выправочно-подбивочно-рихтовочная машина типа ВПР. Соответствующие блоки устанавливаются на эти машины, взаимодействие между которыми осуществляется по каналам связи, не исключая возможность осуществления связи через внешние носители. Пример, результаты измерений состояния пути вагоном путеизмерителем записываются на внешние носители и передаются оператору дистанционно управляющему хоппер-дозатором и путевой машиной типа ВПР, например, из вагона сопровождения путевых машин, в котором может быть установлен компьютер, оборудованный системой прямой и обратной связью с блоками. При этом выполнение технологических операций может осуществляться с разделением времени, а соответствующие блоки управления, в частности блок управления перемещением балласта блок перемещения рельсовых нитей работать автономно. Блоки управления могут быть соединены с пультом, позволяющим при необходимости управлять производственными модулями, дистанционно, например, за счет использования радиосигналов или мультисенсорных интеллектуальных датчиков. Каждый из производственных модулей может состоять как из одного многофункционального устройства, так и нескольких, но объединенных общим интерфейсом, например, модуль перемещения балласта может состоять из устройств: выгрузки и укладки балласта на путь, удаления излишков балласта с пути, вырезки загрязненного балласта. Нормативно-справочная информация о технических и эксплуатационных характеристиках участка пути, на котором производятся работы, пороговые значения очертаний рельсовых нитей, соответствующие нормам содержания рельсовой колеи, требования к приемке выполненных работ, прочая задаваемая оператором информация содержится блоке формирования и поддержания нормативно-справочной информации и постоянно обновляется.
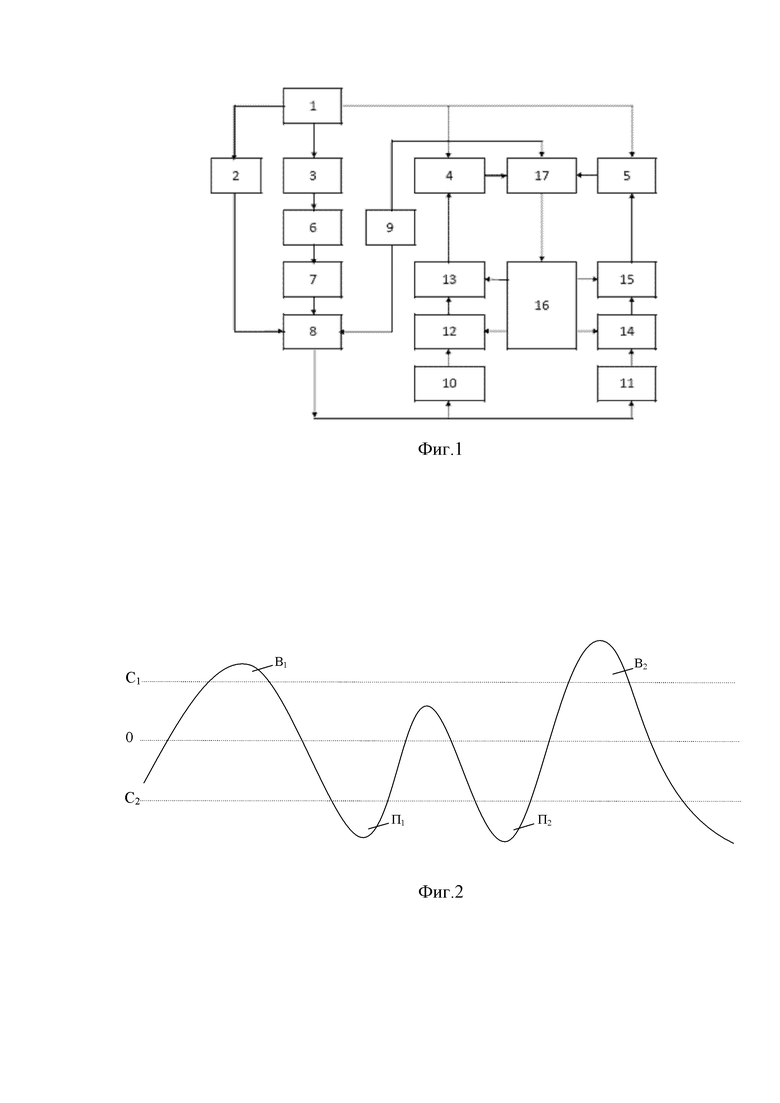
На фиг.1 изображена структурная схема ИУС, на котором изображены:
1. Датчик местоположения ИУС
2. Блок формирования цифровой карты контролируемого железнодорожного пути;
3. Измерительный модуль
4. Модуль выработки управляющих воздействий по перемещению рельсов и/или шпал
5. Модуль выработки управляющих воздействий по перемещению балласта
6. Блок преобразования сигналов от механизмов измерения
7. Блок сравнения измеренных величин с задаваемыми пороговыми значениями;
8. Блок формирования матрицы измеренных величин, превышающих пороговые значения (неисправности пути) и выбора технологической операции для обеспечения возможности их устранения.
9. Блок формирования и поддержания нормативно-справочной и задаваемой информации.
10. Блок формирования плана и объема работ по устранению неисправностей пути перемещением рельсовых нитей с последующей досыпкой балласта.
11. Блок формирования плана и объема работ по устранению неисправностей пути перемещением рельсовых нитей с предварительной вырезкой балласта.
12. Блок расчета перемещений рельсовых нитей и/или шпал, необходимых для устранения неисправностей пути.
13. Блок управления перемещениями рельсов и/или шпал
14. Блок расчета объема балласта для устранения неисправностей пути и закрепления пути в новом положении
15. Блок управления перемещением балласта
16. Коммутатор (перекрестный переключатель)
17. Блок контроля на соответствие установленным критериям измененного положения рельсовых нитей и оптимального объема перемещаемого балласта.
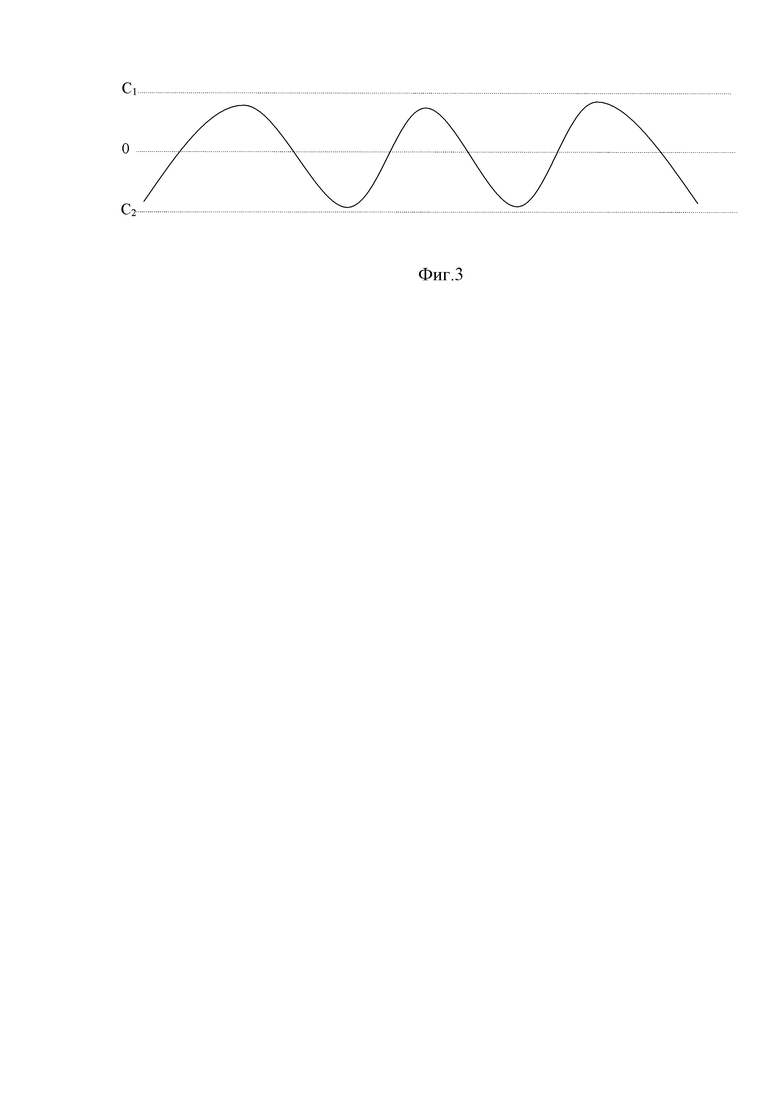
135. На фиг. 2 приведен результат измерения взаимного положения рельсовых нитей по уровню, где О – нулевая линия идеального положения рельсовых нитей, С1 и С2 – пороговые значения, устанавливаемые нормативными документами как отступления от норм содержания рельсовой колеи, или задаваемые оператором, как эталонные. В1 и В2, П1 и П2 – выбросы за эталонные значения, которые подлежат плановому или немедленному устранению и считаются неисправностями пути, отфильтрованные по видам технологических операций по удалению излишков балласта, так называемой вырезки балласта В1 и В2 и подсыпке балласта П1 и П2 для приведения состояние пути к эталонным значениям как показано на фиг.3. Пороговых значений С может быть несколько по степеням отступлений, которые определяют очередность их устранения. Объем подсыпаемого или вырезаемого балласта может рассчитываться, как площадь криволинейного участка, превышающего пороговые значения Вi и Пi на длине неровности пути, соответствующей расстоянию между шпалами с экспериментально полученными коэффициентами. Датчик местоположения комплекса 1 связан со спутником ГЛОНАСС или JPS и блоком формирования цифровой карты контролируемого железнодорожного пути 2. Если модули работают автономно датчик местоположения комплекса 1 должен устанавливаться на все отдельно работающие модули. Приемники средств спутниковой навигации, могут выполняться в виде активных антенн, установленных на производственные модули при этом, выходы антенн могут быть подключены через аналогово - цифровые преобразователи к датчикам измерения очертаний рельсовых нитей, установленных на измерительном модуле и/или на другом производственном модуле с целью точечной привязки выявленного дефекта к месту его обнаружения. Измерительным модулем 3 служат измерительные устройства, установленные на раме ИУС для измерения геометрических очертаний рельсовых нитей, их взаимного положения, стрел изгиба пути в плане, и в продольном профиле, очертаний балластной призмы, других элементов опорной поверхности рельсов и их отклонением от эталонных значений, задаваемых в виде априорной информации перед измерением и включающей также сведения об эксплуатационных и технических характеристиках измеряемого участка пути. В качестве измерительного модуля может использоваться вагон путеизмеритель, например, типа ВПС ЦНИИ 4 (Руководство по эксплуатации вагона-путеобследовательской станции ЦНИИ-4МД. – М.: - ПИК ПРОГРЕСС – 2002.), а обмен информации осуществляться через внешние носители. Модуль выработки управляющих воздействий по перемещению рельсов 4 обеспечивает перемещение одной рельсовой нити или обеих нитей вместе со шпалами по уровню и в плане, или перемещение шпалы, например, при замене одной шпалы, старой на новую, перемещения всей рельсошпальной решетки при изменении радиуса кривой, уклона пути и т.д., далее «перемещение рельсовых нитей». Модуль распределения балласта 5 обеспечивает перемещение балласта из емкости, где он хранится, например, кузов грузового вагона, в железнодорожный путь, и наоборот с железнодорожного пути в емкость или на обочину при выполнении операции по удалению дефектов железнодорожного пути, влияющих на положение рельсовых нитей по уровню, например, так называемой «вырезкой» балласта, а также перемещение балласта, уложенного в железнодорожный путь, посредством его рыхления, уплотнения («подбивка»), разравнивания, восстановления очертаний балластной призмы и т.п. (в дальнейшем «перемещение балласта»). Блок преобразования сигналов 6 от механизмов измерения предусматривает преобразование этих сигналов от механических, аналоговых устройств, датчиков, установленных на элементах подвижного состава на раме которого установлена ИУС или ее отдельный производственный модуль в цифровую форму. Блок 7 сравнивает измеренные величины с пороговыми значениями, задаваемыми в качестве нормативно справочной информации в блоке 9 и для ИУС считающиеся эталонными. Блок 8 формирует матрицу измеренных величин, превышающих пороговые значения, которые являются неисправностями железнодорожного пути и подлежат устранению подсыпкой или вырезкой балласта. Формирование матрицы возможно в случае не полной информации по результатам измерений, например, сбоя в работе механизмов измерения, или при учете работ на железнодорожном пути по устранению неисправностей, выполненных в период между измерениями. В этом случае матрица формируется с учетом цензурирования исходной информации (ГОСТ 27.504-84 Надежность в технике. Методы опенки показателей надежности по цензурированным выборкам. - М.; Стандарты, 1984 - 41 с.), получаемой из блока 7 и данных из базы нормативно-справочной и задаваемой оператором информации, содержащейся в блоке 9 как совокупности упорядоченных данных о технических характеристиках устройства измеряемых участков пути, элементов его конструкции, эксплуатационных характеристиках измеряемых участков пути, нормативных или задаваемых оператором требуемых по условиям эксплуатации значений отступлений от геометрических параметров железнодорожного пути, выполненных работах в период между измерениями, прочей справочной информации, необходимой для адекватной интерпретации данных измерений и оценки состояния пути в соответствии с установленными нормативами.
Сформированные в матрице 8 неисправности пути распределяются по видам технологических операций необходимых для их устранения. Блок 10 формирования плана и объема работ по устранению неисправностей пути перемещением рельсовых нитей с последующей досыпкой балласта осуществляет предварительную подготовку информации для технологической операции по исправлению неисправностей пути с предварительным перемещением рельсовых нитей, а блок 11 формирования плана и объема работ по устранению неисправностей пути перемещением рельсовых нитей с предварительной вырезкой балласта осуществляет предварительную подготовку информации для технологической операции по исправлению неисправностей пути с предварительным перемещением балласта. Блок расчета перемещений рельсовых нитей 12 рассчитывает перемещения потребные для приведения очертаний рельсовых нитей к эталонным значениям очертаний рельсовых нитей, а блок 13 формирует управляющие воздействия по перемещению рельсовых нитей производственным модулем 4. В блоке 14 рассчитывается объем балласта для закрепления перемещаемого пути в заданное положение или вырезки загрязненного балласта с заменой на чистый, а блок 15 управляет этим перемещением. Блоки 12 и 14, 13 и 15 связаны друг с другом через коммутатор 16 и с блоком 17 контроля измененного положения рельсовых нитей на соответствие эталонным значениям из блока 9 и оценки объема балласта потребного для их закрепления. Контроль соответствия нового положения рельсовых нитей после их перемещения модулем 4 на соответствие эталонным значениям из блока 9 осуществляется на основе критериев, установленных получателем услуг по проведению ремонтных работ и может иметь экспертные качественные (хорошо-плохо) так и цифровые критерии, введенные в блок 9 например, степень уплотнения балласта, форма балластной призмы, соответствие очертаний рельсовых нитей нормативным значениям и др. Предусмотрена возможность визуального контроля состояния железнодорожного пути после проведенных путевых работ с последующим вмешательством оператора в блоки управления перемещением балласта и рельсовых нитей, например, через пульт управления.
Система работает следующим образом. Датчик пути 1, установленный по меньшей мере на одном производственном модуле ИУС, заносит информацию о пройденном пути в блок 2. Производственный измерительный модуль 3 записывает изменение состояния пути с привязкой измеряемых параметров к цифровой карте железнодорожного пути блока 2, а блок 6 преобразует сигналы от измерительных механизмов в цифровой вид. Информация о технических и эксплуатационных характеристиках измеряемых участков пути, о предыдущих измерительных поездках и их результатах, выполненных путевых работах в периоды между поездками, нормативных значениях содержания железнодорожного пути и т.п. заносится в базу априорной информации блока 9 ИУС. Информация в блок 9 может поступать любым доступным способом: вручную, оператором с пульта управления, с внешних носителей, по каналам связи с другими автоматизированными системами. Измерительные данные из блока 7 в блоке 8 фильтруются путем сравнения с эталонными пороговыми значениями из базы блока 9, и создается матрица выявленных отступлений от эталонных значений, учитываемых как неисправности пути, подлежащие устранению в плановом или неотложном порядке в зависимости от величины отступления от пороговых значений с отметкой их места расположения из информационной карты блока 2. В блоке 8 также определяется вид технологической операции по перемещению балласта для приведения железнодорожного пути к заданным в блоке 9 эталонным значениям, а именно: подсыпка балласта с железнодорожного пути с формированием плана объемов работ по перемещению рельсовых нитей в блоке 10 с последующим перемещением балласта; или вырезка и удаление балласта в блоке 11 с последующем перемещением рельсовых нитей. Блок 10 информационно управляет блоком 12 по расчету перемещений рельсовых нитей, который по результатам расчета передает управление блоку 13, формирующему управляющие воздействия на рабочие органы модуля 4 по перемещению рельсовых нитей, и от которого по завершению операции по перемещению рельсовой нити поступает информация в блок 17 для сравнения соответствия нового перемещенного положения рельсовых нитей нормативным значениям. По завершению расчета величин перемещений рельсовых нитей в блоке 12 через коммутатор 16 передается информационно управляющее воздействие на блок 14 расчета объема досыпаемого балласта достаточного для сохранения рельсовых нитей в новом положении. При этом коммутатор 16 выполнен с возможностью установки диодных ограничителей. Блок 14 передает информационно управляющее воздействие на блок 15, управляющий рабочими органами модуля 5 по перемещению балласта и по завершению операции по перемещению балласта от модуля 5 информация передается в блок 17, где происходит сравнение величин перемещений балласта, рельсовых нитей, соответствия нового положения рельсовых нитей заданным значениям из блока 12 и при несоответствии информация поступает в блок 17, и итерация повторяется. Коммутатор 16 работает таким образом, что блоки 13 и 15 не могут работать одновременно. Блок 11 информационно управляет блоком 14 по расчету объему удаляемого с железнодорожного пути балласта и по завершению расчетов осуществляет информационно-управляющее воздействие на блок 15 выработки управляющих воздействий на рабочие органы модуля 5 перемещения балласта, который по завершению операции по перемещению балласта передает информацию об объеме и месте собранного с пути излишек балласта в блок 18. Одновременно по завершению расчетов в блоке 14 через коммутатор 16 поступает информационно управляющее воздействие на расчет величин перемещения рельсовых нитей в блок 12. Таким образом, существует двусторонняя связь блоков 12 и 14 через коммутатор 16.
Таким образом, изобретение обеспечивает расчетную подсыпку или «вырезку» балласта в объеме необходимом для приведения железнодорожного пути в состояние, соответствующее заданным критериям его содержания, уменьшает влияние человеческого фактора на распределение балласта, оптимизируя его расход, снижает время подготовки к путевым работам, экономит балласт, повышает производительность путевых работ и их качество.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из специального подвижного состава с известной жесткостью рессорного подвешивания и система для его реализации | 2021 |
|
RU2769590C1 |
| Способ контроля дозировки балласта и измерительно-управляющее устройство дозированной выгрузки и распределения балласта на железнодорожный путь | 2020 |
|
RU2755610C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| Подрельсовое устройство железнодорожного пути и способ укладки по меньшей мере одного подрельсового устройства железнодорожного пути | 2020 |
|
RU2746554C1 |
| СПОСОБ УКРЕПЛЕНИЯ БАЛЛАСТНОЙ ПРИЗМЫ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2583112C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ | 2022 |
|
RU2781703C1 |
| Устройство и способ выравнивания рельсовых нитей по уровню распределением балласта под шпалу | 2022 |
|
RU2788986C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА КОМБИНИРОВАННОМ ХОДУ | 2009 |
|
RU2411137C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| Подрельсовое устройство и способ оперативного восстановления рельсовой нити по уровню | 2022 |
|
RU2786891C1 |
Изобретение относится к информационно-управляющим комплексам. Технический результат заключается в повышении производительности и качества путевых работ. Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям, включает вычислительный комплекс с модулем измерения геометрических очертаний балластной призмы и рельсовых нитей, модулем выработки управляющих воздействий на перемещение балласта железнодорожного пути, модулем выработки управляющих воздействий на перемещение рельсовых нитей или/и шпал, взаимосвязанные через блок преобразования сигналов от измерительных механизмов, блок сравнения измеренных величин, блок формирования информационной матрицы измеренных значений, блок расчета величин перемещений рельсовых нитей и/или шпал, блок расчета объема перемещаемого балласта, блок выработки управляющих воздействий на механизмы модуля перемещения балласта, блок выработки управляющих воздействий на механизмы модуля перемещения рельсовых нитей и/или шпал. 7 з.п. ф-лы, 3 ил.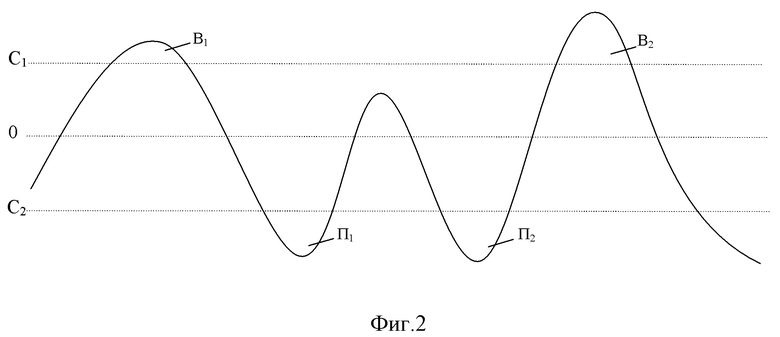
1. Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям, включающаяся в себя вычислительный комплекс, связанный сетью по каналам информационного обмена с установленными на раме транспортного средства производственными модулями, взаимодействующими с железнодорожным путем: модулем измерения геометрических очертаний балластной призмы и рельсовых нитей, устойчиво лежащих на опорной поверхности балластной призмы на железнодорожных шпалах, модулем выработки управляющих воздействий на перемещение балласта железнодорожного пути, модулем выработки управляющих воздействий на перемещение рельсовых нитей или/и шпал, с по меньшей мере с одним датчиком, определяющим местоположение системы и формирующим цифровую карту участка железнодорожного пути, взаимосвязанные через систему информационно управляемых блоков: блоком преобразования сигналов от измерительных механизмов, блоком сравнения измеренных величин с задаваемыми блоком формирования и поддержания нормативно справочной информации пороговыми значениями, блоком формирования информационной матрицы измеренных значений, не соответствующих пороговым значениям с ранжированием по числовым и качественным критериям, установленным нормативно-справочной информацией как неисправностей пути, подлежащих устранению и их местоположения, и связанным с ним блоками формирования матриц неисправностей, подлежащих устранению посредством предварительного перемещения рельсовых нитей и/или шпал с последующим перемещением балласта и матрицы неисправностей, подлежащих устранению посредством предварительного перемещения балласта с последующим перемещением рельсовых нитей и/или шпал; блоком расчета величин перемещений рельсовых нитей и/или шпал; блоком расчета объема перемещаемого балласта; блоком выработки управляющих воздействий на механизмы модуля перемещения балласта; блоком выработки управляющих воздействий на механизмы модуля перемещения рельсовых нитей и/или шпал, отличающийся тем, что блоки расчета объема перемещаемого балласта и расчета перемещений рельсовых нитей и/или шпал двусторонне связаны между собой через коммутатор, через который также взаимодействуют блоки выработки управляющих воздействий на механизмы перемещения балласта и выработки управляющих воздействий на механизмы перемещения рельсовых нитей и/или шпал через введенный в систему блок контроля измененного положения рельсовых нитей и перемещенного объема балласта на соответствие заданным в блоке формирования и поддержания нормативно-справочной и задаваемой информации значениям.
2. Информационно-управляющая система по п.1, отличающаяся тем, что перемещение рельсовых нитей осуществляется совместно со шпалами, на которые рельсовые нити опираются.
3. Информационно-управляющая система по п.1, отличающаяся тем, что модуль перемещения балласта содержит механизмы и устройства выгрузки, укладки балласта на железнодорожный путь, рыхления, уплотнения балласта, удаления балласта с железнодорожного пути и может быть разделена на несколько модулей.
4. Информационно-управляющая система по пп.1 и 3, отличающаяся тем, что по меньшей мере один производственный модуль или устройство этого модуля установлен на другом транспортном средстве, чем остальные.
5. Информационно-управляющая система по п.1, отличающаяся тем, что коммутатор выполнен как перекрестный переключатель с диодными ограничителями.
6. Информационно-управляющая система по п.1, отличающаяся тем, что информационный обмен между блоками осуществляется через внешнее запоминающее устройство.
7. Информационно-управляющая система по п.1, отличающаяся тем, что управление осуществляется дистанционно.
8. Информационно-управляющая система по п.1, отличающаяся тем, что блок управления перемещением балласта работает автономно от блока перемещения рельсовых нитей.
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| ПУТЕВАЯ МАШИНА | 2001 |
|
RU2196860C1 |
| ХОППЕР-ДОЗАТОР | 2000 |
|
RU2180888C1 |
| US 9689116 B2, 27.06.2017 | |||
| US 10081376 B2, 25.09.2018. | |||

