Изобретение относится к пневмогидравлическим системам общего назначения и в частности, к приводу разгрузчно-дозирующих устройств укладки балласта на железнодорожный путь специальным подвижным составом при строительстве и ремонтах железнодорожного пути.
Выгрузка и укладка балласта на железнодорожный путь осуществляется преимущественно специальным подвижным составом, в основном специальными вагонами грузового типа, а именно хоппер-дозаторами, оснащенными разгрузочно-дозирующими устройствами. Известно (Руководство по эксплуатации хоппер-дозатора ВПМ 770 №770.00.000РЭ) разгрузочно-дозирующие устройство хоппер-дозатора выполненное в виде поворотных крышек, перекрывающих разгрузочные отверстия бункера, размещенного в нижней части кузова вагона, установленного на раму, опирающуюся на ходовые тележки, и дозатор балласта, выполненный в виде рамы, состоящей из продольных и поперечных балок, свободно охватывающей бункер. Крышки закреплены на приводных валах, проходящих через бункер вагона. Механизм привода крышек содержит силовой пневмоцилиндр, к штоку которого шарнирно прикреплен рычаг, второй конец которого прикреплен к приводному валу, на котором жестко закреплена крышка.
Дозатор висит на тягах под рамой вагона. Механизм привода дозатора, состоит из двух, расположенных по разные стороны вагона, приводных валов, каждый из которых соединен через систему рычагов и тяг со своим силовым пневмоцилидром, включенным в пневмомагистраль через систему трубопроводов, перекрываемых распределительным краном. На приводном валу закреплены два рычага, которые поднимают или опускают дозатор. Один рычаг соединен с тягой, шарнирно прикрепленной к дозатору, а второй рычаг, с тягой шарнирно прикрепленной к кузову вагона и связанной с гайкой и винтом, устанавливающим ограничение перемещения рычага. Дозатор перемещается по направляющей, установленных на внутренней стороне поперечной торцевой балки рамы дозатора в виде швеллера, который обеспечивает перемещение дозатора по роликам, установленным на внешних стенках бункера. Высота подъема дозатора регулируется стопор-фиксаторами в виде гайки, на которую опирается один из рычагов, называемый, стопорным, соединенный специальной подвеской с первым рычагом приводного продольного вала; гайка при вращении маховика устанавливается на высоте, контролируемой по шкале дозирования. Щитки управления предназначены для переключения золотниковых кранов, собранных в блок на продольных сторонах хоппер-дозатора. Клапан максимального давления позволяет регулировать и снижать максимальное давление, поступающее от питательной магистрали локомотива в рабочую пневмомагистраль до оптимальной.
Привод разгрузочно-дозирующих устройств специального подвижного состава через рычажную передачу кинематически связан со штоком пневмоцилиндров, питаемых от питательной магистрали локомотива через систему трубопроводов, подключенных к этой магистрали с помощью соединительных рукавов и разобщительных кранов, и управляемых вручную оператором с помощью кранов управления от щитков управления, размещенных на вагоне. При этом привод обеспечивает работу силовых пневмоцилиндров независимо друг от друга. (Хоппер-дозаторы - М.: изд-во АИСнТ, 2011, - С. 128).
На основании предварительно составленного плана путевых работ, оператор перемещением маховика устанавливает высоту дозатора над уровнем головки рельс, соответствующую уровню засыпки балластом железнодорожного пути и в процессе выгрузки и разравнивания балласта дозатором при движении специального подвижного состава открывает и закрывает перемещением рукояток управления крышки, высыпая балласт в места заранее определенные планом путевых работ, а дозатор разравнивает балласт на заданной отметке относительно установленного уровня.
Недостатком известной системы привода и его конструкции является: инерционность управления; большие габариты и вес пневмоцилиндров и всего механизма и в целом; наличие сложной конструкции рычажно-приводной передачи, вызывающие увеличение затрат на их обслуживание и регулировку; высокий уровень металлоемкости, не оптимальное расходование энергии локомотива на работу компрессора, подающего воздух в пневмомагистраль, отсутствие возможностей реализации цифровых способов управления, влияние человеческого фактора на объем выгружаемого балласта.
Для достижения технического результата по уменьшению веса и габаритов механизмов привода, повышения точности позиционирования и оптимизации энергопотребления и оптимизации режимов работы с возможностью реализации цифровых способов управления на рабочую пневмомагистраль, подключаемую через разобщительные краны к питательной магистрали локомотива, после разобщительного крана в качестве источника энергии устанавливается пневмогидравлический преобразователь с элементами регулирования, подключенный к блоку гидравлических распределителей, соединенных гидролиниями с силовыми гидродвигателями, каждый из которых механически соединен с дозатором, подвешенным под бункером на четырёх механических тягах, крышками бункера, установленными на поворотном валу, устройством ограничения засыпки в середину колеи и устройством контроля положения, соединенным с прибором управления блока гидравлических распределителей. Причем прибор управления блока гидравлических распределителей снабжен аналоговым либо цифровым, либо обоими интерфейсами для подключения к системе управления верхнего уровня и пневмогидравлическому преобразователю, а пневмогидравлический преобразователь содержит блок управления, связанный с прибором управления блока гидравлических распределителей и элементами регулирования пневмогидравлического преобразователя.
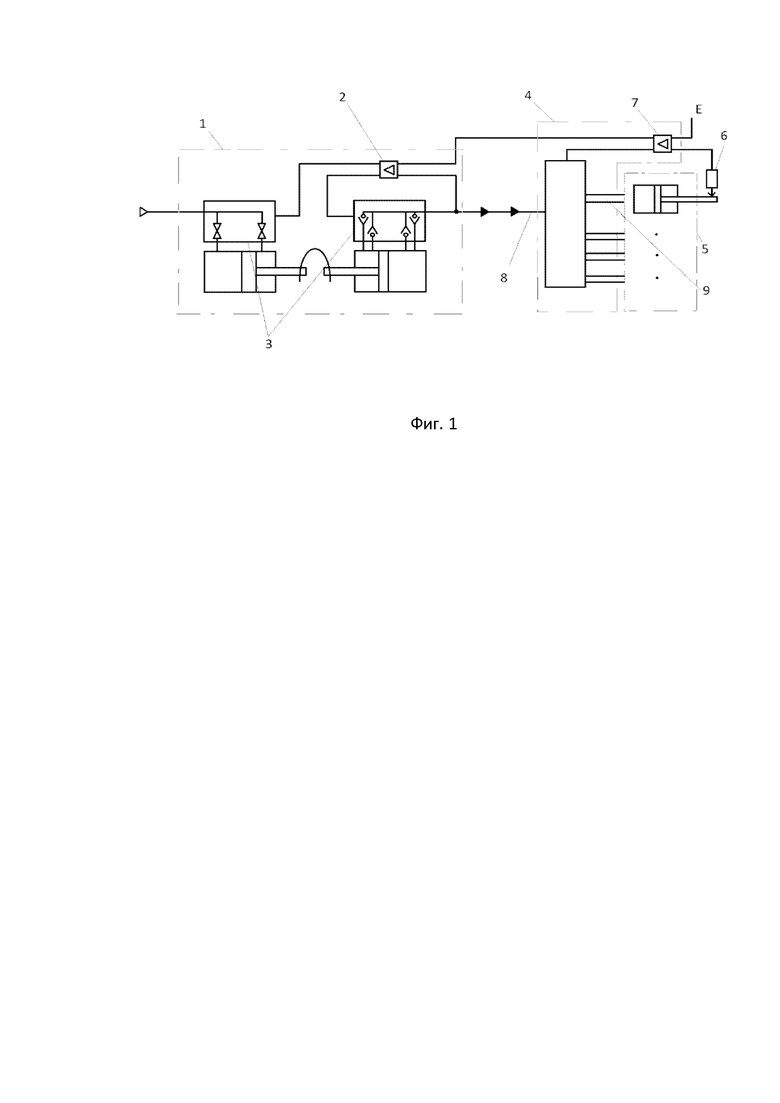
На фигуре 1 приведена функциональная схема привода разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь.
Приняты обозначения:
1 - Пневмогидравлический преобразователь;
2 - Блок управления;
3 - Элементы регулирования (распределительная и клапанная регулирующая аппаратура);
4 - Блок распределителей;
5 - Гидродвигатели;
6 - Устройство контроля положения;
7 - Прибор управления блока гидравлических распределителей;
8 - Гидролинии;
9 - Гидролинии
Привод работает следующим образом. Перед началом работ производитель работ по выгрузке и укладке балласта в железнодорожный путь прибором управления 7 выставляет режим работы, а именно: последовательность открытия всех или выборочно, разгрузочных крышек, продолжительность работы с открытыми крышками, угол на который крышки (крышку) следует открыть (как правило, в случае точечно подсыпаемого балласта), высота подъема дозатора относительно уровня головки рельсов. От прибора управления 7 блока гидравлических распределителей 4 по гидролиниям 9 поступают команды на работу силовыми гидродвигателями 5. Одновременно на блок управления 2 от прибора управления 7 поступает команда выбора режима работы пневмогидравлического преобразователя 1 по видам и объемам операций рабочим органам специального подвижного состава. Блок управления 2, взаимодействуя с элементами регулирования 3 пневмогидравлического преобразователя 1, питаемого воздухом от рабочей пневмомагистрали через разобщительные краны, задает режимы работы пневмогидравлического преобразователя, например режимы постоянной мощности, постоянного давления, постоянного расхода, комбинированные режимы. Контроль положения рабочих органов гидродвигателей 5 производится устройством контроля положения 6, которое выдает информацию в прибор управления 7.
Прибор управления 7 управляет приводом по командам - от оператора, управляющего выгрузкой и укладкой на путь материала из специального подвижного состава, при ручном управлении, или - от системы верхнего уровня (вычислительного комплекса), при работе в автоматическом режиме.
При работе в автоматическом режиме план путевых работ связанных с местоположением и объемом выгружаемого балласта записанный на электронную карту (флеш носитель) с координатами местоположения производства работ с балластом в виде навигационной карты любым известным способом вводится в прибор управления 7, имеющее вычислительное устройство и навигационный приемник, установленный на специальном подвижном составе для выгрузки и укладки балласта, выгружает балласт в заданную точку и в объеме, указанную в электронной карте и перемещается по команде оператора в следующую точку от навигационного приемника.
Изобретение относится к пневмогидравлическим системам общего назначения и более конкретно, к приводу разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь специальным подвижным составом при строительстве и ремонтах железнодорожного пути. Привод управления дозированной выгрузкой балласта на железнодорожный путь содержит рабочую пневмомагистраль, подключаемую через разобщительные краны к питательной магистрали локомотива, с разгрузочно-дозирующими устройствами специального подвижного состава и более конкретно хоппер-дозатора, а именно: крышек бункера, установленных на поворотном валу, и дозатора, подвешенного под бункером на четырех механических тягах, установленного после разобщительного крана пневмогидравлического преобразователя с элементами регулирования, подключенного к блоку гидравлических распределителей, соединенных гидролиниями с силовыми гидродвигателями, каждый из которых механически соединен с дозатором, крышками бункера и устройством контроля положения, соединенным с прибором управления блока гидравлических распределителей. При этом прибор управления может быть включен в вычислительный комплекс планирования и управления путевыми работами. Технический результат – уменьшение веса и габаритов механизмов привода, повышение точности позиционирования и оптимизации энергопотребления и оптимизации режимов работы с возможностью реализации цифровых способов управления, уменьшение веса и габаритов механизмов привода, повышение точности позиционирования и оптимизации энергопотребления и оптимизации режимов работы с возможностью реализации цифровых способов управления, уменьшение веса и габаритов механизмов привода, повышение точности позиционирования и оптимизация энергопотребления и оптимизация режимов работы с возможностью реализации цифровых способов управления. 4 з.п. ф-лы, 1 ил.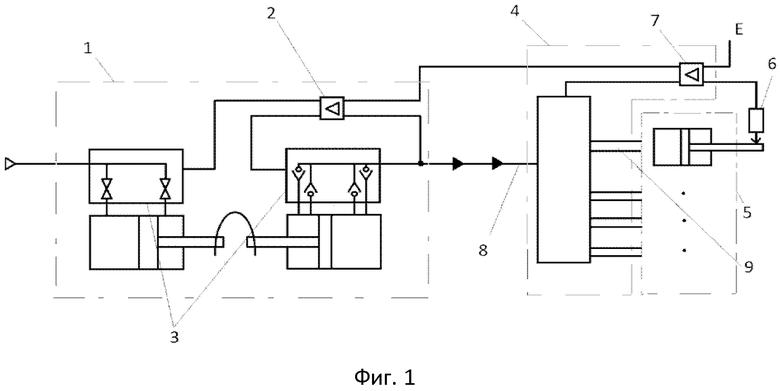
1. Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь, содержащий рабочую пневмомагистраль, подключаемую через разобщительные краны к питательной магистрали локомотива, с разгрузочно-дозирующими устройствами специального подвижного состава, в частности крышками бункера, установленными на поворотном валу, и дозатором, подвешенным под бункером на четырёх механических тягах, отличающийся тем, что на рабочей пневмомагистрали после разобщительного крана устанавливается пневмогидравлический преобразователь с элементами регулирования, подключённый к блоку гидравлических распределителей, соединённых гидролиниями с силовыми гидродвигателями, каждый из которых механически соединён с дозатором, крышками бункера и устройством контроля положения, соединённым с прибором управления блока гидравлических распределителей.
2. Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь, по п. 1, отличающийся тем, что прибор управления блока гидравлических распределителей снабжён аналоговым либо цифровым, либо обоими интерфейсами для подключения к системе управления верхнего уровня и пневмогидравлическому преобразователю.
3. Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь, по п. 1, отличающийся тем, что пневмогидравлический преобразователь содержит блок управления, связанный с прибором управления блока гидравлических распределителей и элементами регулирования пневмогидравлического преобразователя.
4. Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь, по п. 1, отличающийся тем, что прибор управления включен в вычислительный комплекс планирования и управления путевыми работами.
5. Привод разгрузочно-дозирующих устройств укладки балласта на железнодорожный путь, по п. 1 или 4, отличающийся тем, что прибор управления содержит навигационный приемник, определяющий местоположения выгрузки.
| US 5359942 A, 01.11.1994 | |||
| US 5423268 A, 13.06.1995 | |||
| ХОППЕР-ДОЗАТОР | 2000 |
|
RU2180888C1 |
| ХОППЕР-ДОЗАТОР | 2005 |
|
RU2291076C1 |
| Хоппер-дозатор | 1986 |
|
SU1341316A1 |

