Изобретение относится к сельскому хозяйству, в частности к зоотехнии, где для оценки телосложения животных измеряют экстерьерные параметры. Изучение конституции и экстерьера необходимо для зоотехника как познание основы, на которой развиваются биологические особенности и хозяйственная продуктивность, достоинства и недостатки, заметить черты ослабления конституции, определить племенную ценность животного. Традиционный подход к оценке животного основан на результатах визуального осмотра, ощупывании и, как правило, контактных измерениях. Для получения числовых значений, характеризующих экстерьер сельскохозяйственных животных, применяют метод объективной оценки. Он включает в себя взятие промеров у животных, их статистическая обработка (индексы телосложения, экстерьерный профиль) и фотографирование.
Традиционный способ получения экстерьерных параметров заключается в контактном измерении животных. В этом случае замеры проводятся с помощью измерительных инструментов (мерная лента, мерная палка, циркуль).
Недостатками традиционной оценки являются:
- из-за непредсказуемости поведения и реакции животных при контакте с оценщиком способ оценивается как небезопасный;
- одна и та же стать может быть оценена в разной степени, в зависимости от квалификации и опыта оценивающего;
- при измерении высоты отдельных частей тела мерная палка должна находиться в строго вертикальном положении, что на практике не всегда удается из-за реакции животных, что ведет к ошибкам измерения;
Известен способ проведения промеров животных с использованием лазерного дальномера и лазерной указки [1]. Экстерьерные параметры определяют одновременным измерением двумя противоположными дальномерами расстояний до маркеров, установленных на каждой стороне стати животного, с учетом расстояния между дальномерами. Измерения одновременно передают в компьютер для формирования результатов. Устройство содержит станок для фиксации животных и измерительный инструмент.
Наиболее близким по технической сущности является метод автоматической экспертной оценки сельскохозяйственных животных на основе бесконтактного измерения трехмерных морфологических характеристик животного [2, 3]. Сущность метода заключается в построении плотной трехмерной математической модели формы животного по набору изображений и карт глубины, снятых с помощью Kinect-камеры. Данный способ позволяет проводить автоматически комплексную оценку (ценности) каждого животного с учетом всех прижизненных измерений морфологических характеристик по конституции и экстерьеру, породности и происхождению, продуктивности и развитию, качеству потомства и воспроизводительной способности. Это решение принято за прототип.
Использование оптических приборов и цифровых технологий позволит примерно в 100 раз сократит временные затраты на проведение ручной и субъективной оценки, исключит необходимые контактные измерения линейных промеров, живой массы и др.
Недостатком указанных способов является то, что их использование возможно при наличии в отдельном помещении устройства для фиксации животных оснащенного необходимым оборудованием.
Задачей предлагаемого изобретения является повышение точности измерения и снижение общего времени на определение экстерьерных параметров сельскохозяйственных животных и их анализ.
Сущность изобретения заключается в том, что в условиях фермы при содержании животных в стойлах определяются экстерьерные параметры методом обработки изображений, полученных с помощью сенсора глубины.
Данный способ был осуществлен следующим образом.
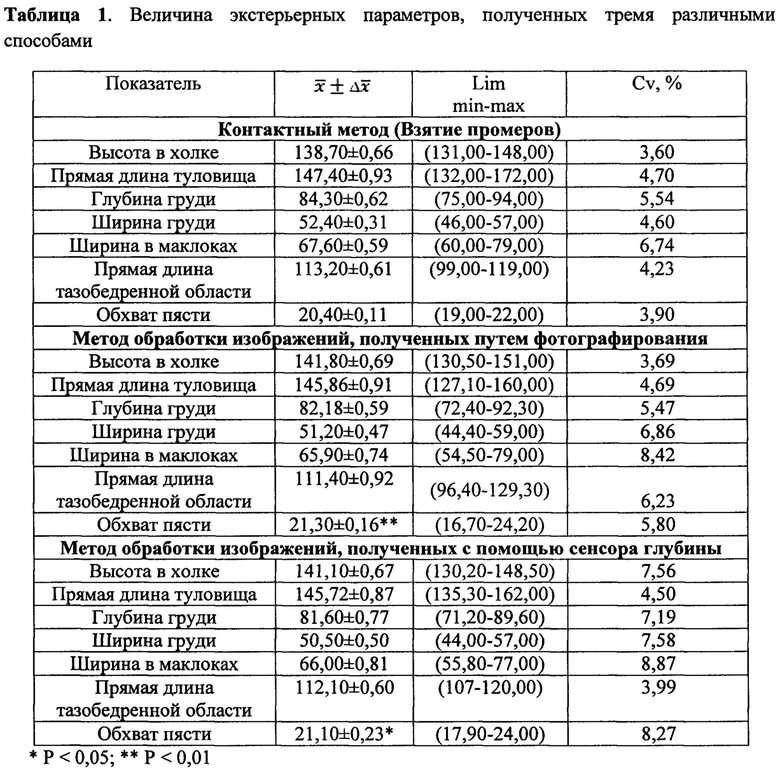
Первоначально для сравнения предлагаемого способа оценки экстерьера животных, на племенных предприятиях Удмуртской Республики были оценены по экстерьеру 150 коров черно-пестрой и холмогорской пород. Определены количественные параметры следующих промеров: высота в холке, глубина груди, ширина груди, ширина в маклоках, прямая длина тазобедренной области, прямая длина туловища, обхват пясти. Указанные параметры наиболее точно характеризуют габариты (каркас) животного.
Для сравнения экстерьерные параметры были получены тремя способами. Первый способ заключается в контактном измерении. В этом случае замеры проводились с помощью измерительных инструментов (мерная лента, мерная палка, циркуль).
Второй способ заключается в определении промеров статей коров по их изображениям, полученным путем фотографирования с помощью введения в кадр перспектрометра, размеры которого заведомо известны. В качестве перспектрометра была применена метровая линейка. Изображение получено на цифровом фотоаппарате, установленном на штативе, с использованием сетки фокусировочного экрана. Указанная функция позволяет выровнять получаемое изображение относительно экрана фотоаппарата. Так, были получены три проекции животного: вид сбоку, сзади и спереди. При снятии первой проекции животное располагалось параллельно экрану фотоаппарата, в двух других случаях - перпендикулярно.
Полученные изображения были обработаны в графическом редакторе (Autodesk AutoCAD, Paint) следующим образом. На изображении были определены границы перспектрометра и исследуемых параметров, затем между ними проведена линия. Таким образом, были найдены интересующие нас размеры в пикселях. Истинные размеры экстерьерных параметров животных были вычислены по формуле:

где  - длина перспектрометра, см; s1 - размер перспектрометра в пикселях; s2- размер объекта в пикселях. Длина линии в пикселях вычислена как гипотенуза прямоугольного треугольника, катеты которого составляют длину и ширину выделенной области при определении того или иного промера по изображению.
- длина перспектрометра, см; s1 - размер перспектрометра в пикселях; s2- размер объекта в пикселях. Длина линии в пикселях вычислена как гипотенуза прямоугольного треугольника, катеты которого составляют длину и ширину выделенной области при определении того или иного промера по изображению.
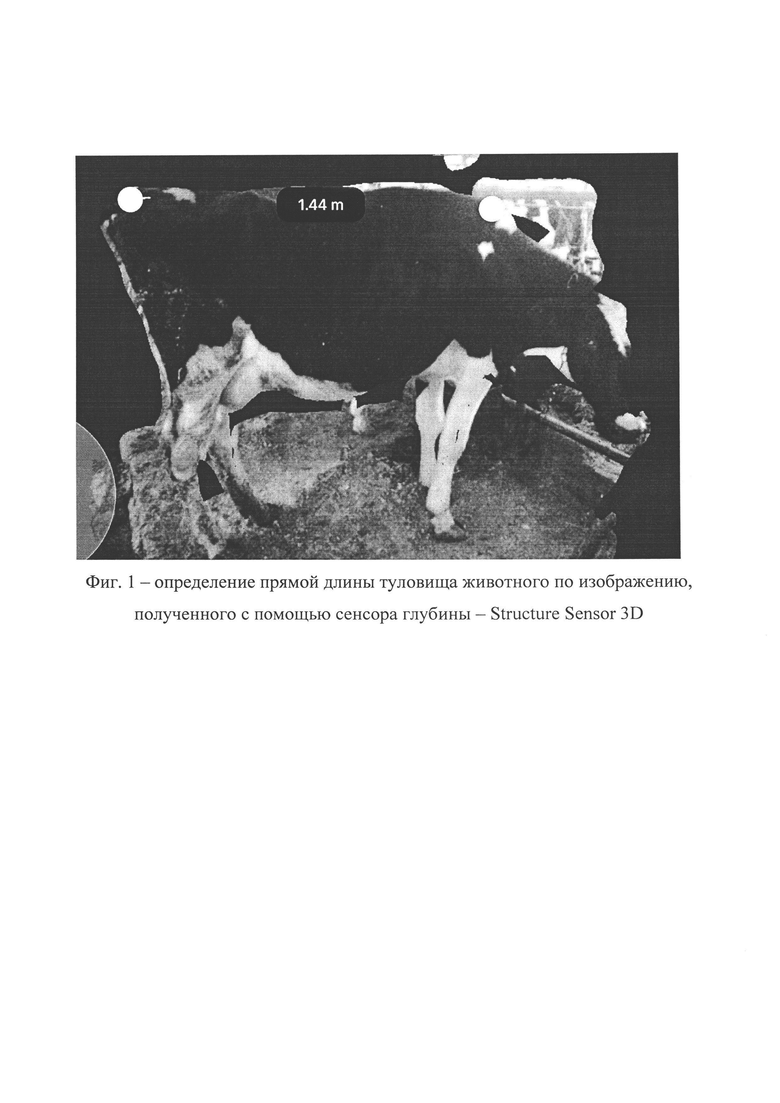
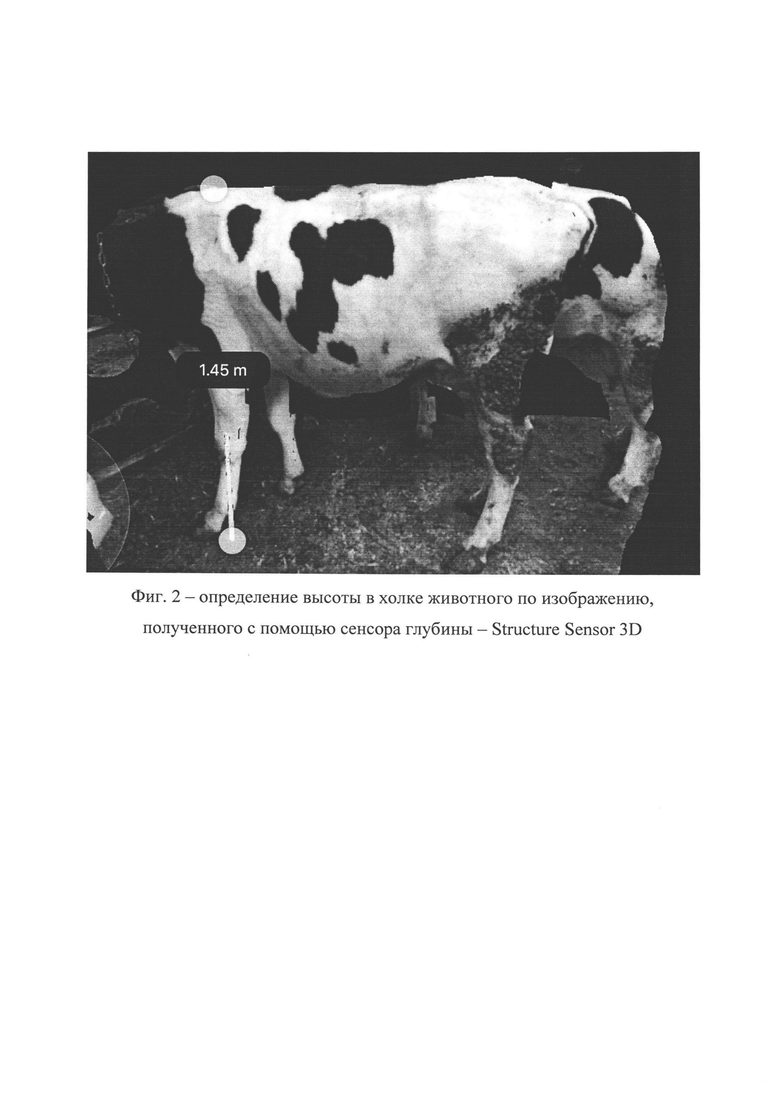
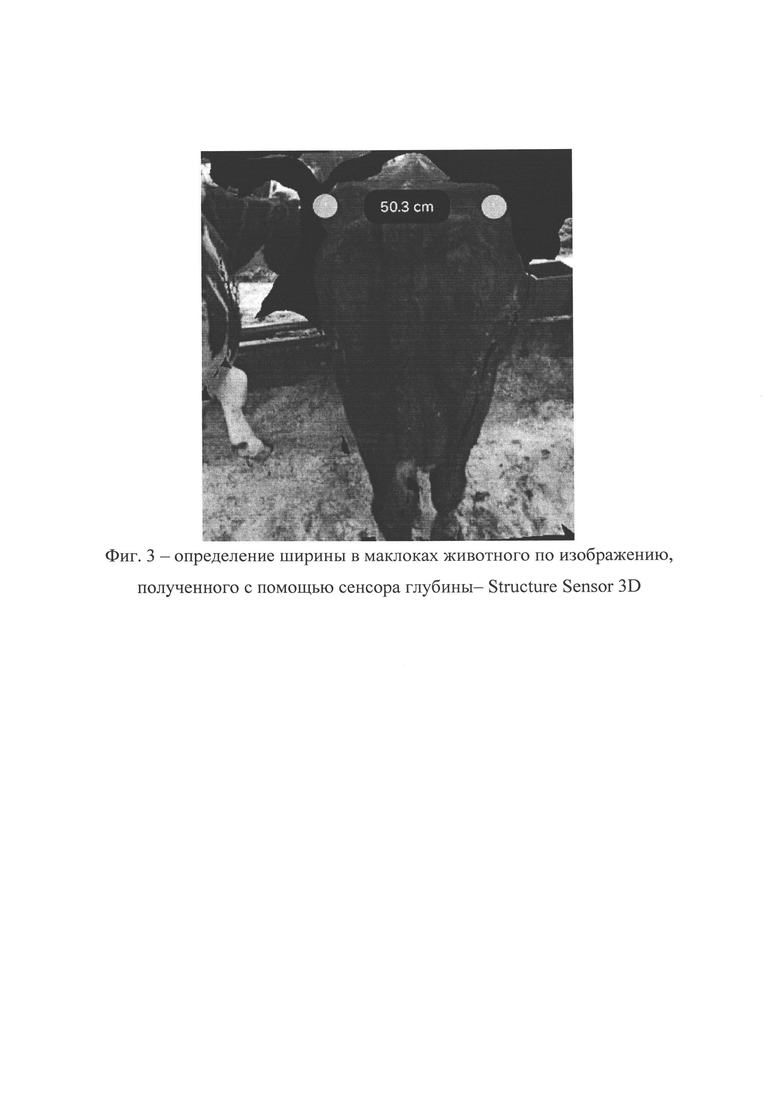
Нами предложен третий способ определения экстерьерных параметров метод обработки изображений, полученных с помощью сенсора глубины -Structure Sensor 3D (фиг. 1, 2, 3). Сенсор глубины представляет собой камеру, которая крепится к планшетному устройству и позволяет захватывать трехмерное изображение объектов. Кроме самой камеры в устройстве используется инфракрасный лазер, сенсор и специальная подсветка. Инфракрасный лазер наносит невидимый для человеческого глаза точечный узор на объекты в пределах 3,5-10 метров, одновременно с ним инфракрасный сенсор регистрирует искажения узора. Таким образом, создается карта глубин для сцены и объектов внутри нее. Узор дополняется изображением с обычной камеры, в результате чего получается трехмерные модели предметов или окружающего пространства. Программное обеспечения для сенсора (Structure Sensor Scanner, M3DScan, ItSeez3D, Structure Sensor Room Capture) позволяет получать информацию о расстоянии между объектами, расстояние от камеры до объекта и определять любой линейный размер самого объекта в режиме реального времени. Основное весомое преимущество использования сенсора глубины заключается в возможности в ускоренном режиме определения размеров объекта без применения перспектрометра и привлечения минимального количества людей и стрессового воздействия на животных. Из полученной модели животного можно определить все необходимые и исследуемые экстерьерные параметры в достаточно большом количестве.
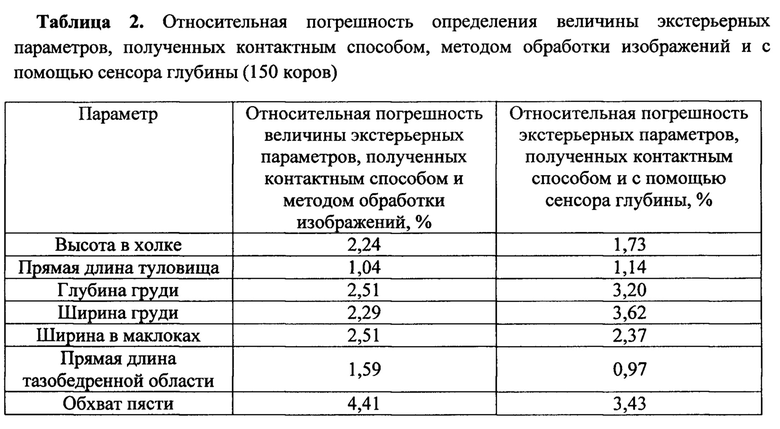
По всем показателям оценки экстерьера коров достоверных различий по величине признаков, полученных разным способом не выявлено за исключением промера «обхват пясти» разница по которому составила 4,41% (Р<0,01) и 3,43% (Р<0,05) (таблица 1). Промер «обхват пясти» характеризует степень развития костяка и в плане его определения является одним из самых «неудобных» промеров и, следовательно, полученные результаты имеют достаточно высокую погрешность. По остальным изучаемым признакам экстерьера погрешность по величине полученных результатов между 1 и 2 способами варьировалась от 1,04% до 2,51%, а между 1 и 3 способами соответственно от 0,97% до 3,62% (таблица 2). Из анализа таблицы 2 видно, что погрешность измерений между контактным способом и методом обработки изображений, полученных путем фотографирования, а также между контактным способом и методом получения промеров с помощью сенсора глубины не превышает 5%.
Таким образом, полученные результаты свидетельствует о целесообразности внедрения цифровых технологий и новых методов получения характеристик телосложения животных в производственных условиях и в режиме реального времени. Бесконтактный способ позволяют с большей точностью замерять линейные размеры (до миллиметров), получить большее количество числовых значений экстерьерных параметров, расходуя меньше времени на получение результата и не вызывая стресса у животных.
Список использованной литературы
1. Способ и устройство проведения промеров сельскохозяйственных животных. Номер патента 2629282С1. Дата публикации 28.08.2017 Заявитель Федеральный научный агроинженерный центр ВИМ Авторы Цой Ю.А., Черноиванов В.И., Танифа В.В., Любимов В.Е., Зеленцов А.И., Кирсанов В.В., Толоконников Г.К.
2. Ручай А.Н., Дорофеев К. А., Кобер А.В. 3D object reconstruction using multiple Kinect sensors and initial estimation of sensor parameters // Proc. SPIE: Applications of Digital Image Processing XLI, 20-23 August 2018, USA.
3. Huang L.W., Li S.Q., Zhu A.Q., Fan X.Y., Zhang C.Y., Wang H.Y. Non-Contact Body Measurement for Qinchuan Cattle with LiDAR Sensor // Sensors. 2018. V. 18.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ЭКСТЕРЬЕРА ЖИВОТНЫХ ПРИ БОНИТИРОВКЕ | 2024 |
|
RU2826315C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖИВОЙ МАССЫ КРУПНОГО РОГАТОГО СКОТА | 2022 |
|
RU2806290C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНОГО ИНДЕКСА ТЕЛОСЛОЖЕНИЯ И ЭКСТЕРЬЕРНО-КОНСТИТУЦИОНАЛЬНОГО ТИПА ЖИВОТНЫХ | 2020 |
|
RU2764307C1 |
| СПОСОБ СОХРАНЕНИЯ ГЕНОФОНДА ПОРОД СКОТА | 1996 |
|
RU2121269C1 |
| Способ и устройство проведения промеров сельскохозяйственных животных | 2016 |
|
RU2629282C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ТИПА ТЕЛОСЛОЖЕНИЯ У КРУПНОГО РОГАТОГО СКОТА | 2005 |
|
RU2294100C2 |
| СПОСОБ ПРОВЕДЕНИЯ ПРОМЕРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО ЖИВОТНОГО | 2019 |
|
RU2762364C2 |
| Способ отбора казахских лошадей жабе для селекционного процесса | 2016 |
|
RU2648148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНУТРИПОРОДНОГО ТИПА ТЕЛОСЛОЖЕНИЯ ЖИВОТНЫХ | 2003 |
|
RU2285398C2 |
| Способ определения внутрипородного типа продуктивности тонкорунных овец | 2022 |
|
RU2809955C1 |
Изобретение относится к области биотехнологии и представляет собой способ определения числовых значений экстерьера животных. Для оценки телосложения животных измеряют экстерьерные параметры. Предложен способ определения экстерьерных параметров методом обработки изображений, полученных с помощью сенсора глубины - StructureSensor 3D. Сенсор глубины представляет собой камеру, которая крепится к планшетному устройству и позволяет захватывать трехмерное изображение объектов. Кроме самой камеры в устройстве используется инфракрасный лазер, сенсор и специальная подсветка. Инфракрасный лазер наносит невидимый для человеческого глаза точечный узор на объекты в пределах 3,5-10 метров, одновременно с ним инфракрасный сенсор регистрирует искажения узора. Таким образом, создается карта глубин для сцены и объектов внутри нее. Узор дополняется изображением с обычной камеры, в результате чего получаются трехмерные модели предметов или окружающего пространства. Программное обеспечение для сенсора глубины позволяет получать информацию о расстоянии между объектами, расстояние от камеры до объекта и определять любой линейный размер самого объекта в режиме реального времени. Изобретение позволяет повысить точность измерения и снизить общее время определения экстерьерных параметров сельскохозяйственных животных. 3 ил., 2 табл.
Способ определения числовых значений экстерьера животных, включающий автоматическую экспертную оценку сельскохозяйственных животных на основе бесконтактного измерения трехмерных морфологических характеристик животного построением плотной трехмерной модели формы животного по набору изображений и карт глубины, снятых с помощью Kinect-камеры, отличающийся тем, что обработку изображений производят с помощью сенсора глубины Structure Sensor 3D, представляющего собой камеру, которая крепится к планшетному устройству и позволяет захватывать трехмерное изображение объектов.
| HUANG L.W | |||
| et al | |||
| Non-Contact Body Measurement for Qinchuan Cattle with LiDAR Sensor, Sensors | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| V | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| KALANTARI M | |||
| et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ и устройство проведения промеров сельскохозяйственных животных | 2016 |
|
RU2629282C1 |

