Изобретение относится к сельскому хозяйству, в частности к проведению промеров животных.
В контексте настоящей заявки использованы следующие сокращения:
КРС - крупный рогатый скот,
МКИ - метод контактных измерений,
ПС - предлагаемый способ,
RFID-метка - транспондер, применяемый в способе автоматической идентификации объектов, в котором посредством радиосигналов считываются или записываются данные RFID (англ. radio frequency identification, радиочастотная идентификация),
RGB (от https://ru.wikipedia.org/wiki/%D0%90%D0%B1%D0%B1%D1%80%D0%B5%D0%B2%D0%B8%D0%B0%D1%82%D1%83%D1%80%D0%B0 англ. red, green, blue - красный, зелёный, синий) - аддитивная цветовая модель, описывающая способ кодирования цвета для цветовоспроизведения с помощью трёх цветов, которые принято называть основными.
Известно, что экстерьер животного - это его внешний вид, наружные формы в целом и особенности отдельных частей тела (стати). Известно также, что одним из методов изучения (оценки) экстерьера является измерение (промеры) тела животного (URL: https://studfile.net/preview/5283952/page:9/ (опубл. 06.11.2019)).
Известен способ проведения промеров сельскохозяйственных животных, включающий применение двух соединенных с компьютером противоположно расположенных лазерных дальномеров с установленными на них лазерными указками по съемным маркерам, которые устанавливают на определенных статях тела животного, стоящего на горизонтальной поверхности, при этом при наведении на съемный маркер лучи лазерной указки параллельны горизонтальной поверхности и взаимно перпендикулярны с лучами дальномера, что позволяет измерять высоту стати животного с учетом поправок, связанных с размерами маркера, лазерных дальномеров и указок (пат. RU 2629282, опубл. 28.08.2017. Бюл. № 25). По известному решению, для измерения ширины стати в горизонтальном сечении тела животного съемные маркеры устанавливают с каждой стороны измеряемой стати животного и одновременно измеряют двумя лазерными дальномерами расстояние с каждой стороны стати животного с учетом расстояния между дальномерами, а измеряемую ширину туловища животного «В» определяют по формуле, связывающей расстояние между объективами дальномера, расстояние от объектива одного дальномера до маркера с одной стороны животного и расстояние от объектива другого дальномера до другого маркера с противоположной стороны животного, причем данные измерения одновременно передают в компьютер для формирования результатов в виде таблиц и построения экстерьерных профилей, отражающих породные стандарты. Во время выполнения промеров животное стоит неподвижно, будучи зафиксировано в специальном станке.
Известен способ определения числовых значений экстерьера животных, включающий автоматическую экспертную оценку на основе бесконтактного измерения трехмерных морфологических характеристик животного построением трехмерной модели формы животного по набору изображений и карт глубины, снятых с помощью Kinect-камеры и обработанных с помощью сенсора глубины Structure Sensor 3D (пат. RU 2769731, опубл. 05.04.2022. Бюл. № 10). По известному решению, сенсор глубины Structure Sensor 3D представляет собой камеру, которая крепится к планшетному устройству и позволяет захватывать трехмерное изображение объектов. Кроме самой камеры в устройстве используется инфракрасный лазер, сенсор и специальная подсветка. Инфракрасный лазер наносит невидимый для человеческого глаза точечный узор на объекты в пределах 3,5-10 метров, одновременно с ним инфракрасный сенсор регистрирует искажения узора. Таким образом, создается карта глубин для сцены и объектов внутри нее. Узор дополняется изображением с обычной камеры, в результате чего получается трехмерные модели предметов или окружающего пространства. Программное обеспечения для сенсора (Structure Sensor Scanner, M3DScan, ItSeez3D, Structure Sensor Room Capture) позволяет получать информацию о расстоянии между объектами, расстояние от камеры до объекта и определять любой линейный размер самого объекта в режиме реального времени.
Наиболее близким по совокупности существенных признаков – прототипом заявляемого изобретения – является способ, включающий получение информационных потоков экстерьера животного с последующей их обработкой с помощью алгоритмов искусственного интеллекта (Иванов Ю.А., Зарикеев А.Р. Использование искусственного интеллекта при оценке экстерьера КРС. //Техника и технологии в животноводстве. - №4 (44). – 2021. С. 6-10). По известному решению, в качестве информационных потоков используются наборы фотографий, предполагается установка двух камер RGB, получение с их помощью стереофотографии (изображение RGB-D) и обработка стереофотографии искусственной нейронной сетью.
К недостаткам известного решения относится ограниченный объем информации, получаемой с помощью используемой аппаратной части: фотографирование выполняется всего двумя камерами.
К общим недостаткам известных решений относится то, что их применяют в отношении неподвижного или малоподвижного животного: например, из фиг. 1 в описании решения (пат. RU 2769731, опубл. 05.04.2022. Бюл. №10) видно, что животное прикреплено цепью к ограждению стойла.
В то же время известно, что животное надо осматривать не только стоящим на месте, но и в движении. В движении гораздо заметнее особенности и степень совершенства двигательного аппарата, спины. Нередко прекрасное впечатление, оставляемое животным в неподвижном состоянии, сразу же нарушается в движении. Большое значение имеют и сами движения, их свобода и просторность (URL: https://biblioteka-laiki.ru/vistavki/metodi-i-tehnika-ocenki-eksteriera_platonov/ (дата опубл.:28.08.2017)).
Технической задачей предлагаемого изобретения является создание способа оценки экстерьера животным при бонитировке, не требующего при осуществлении фиксации животного.
Первым техническим результатом осуществления изобретения является повышение информативности оценки экстерьера животного при его бонитировке.
Вторым техническим результатом осуществления изобретения является отсутствие необходимости привлечения стороннего специалиста.
Третьим техническим результатом осуществления изобретения является автоматическое получение результата по каждому животному и сводной таблицы по стаду, в том числе - статистики по текущему стаду, включая статистику в динамике за интересующий период, сравнение с предыдущими измерениями, показывающими общую динамику состояния скота (ухудшение, улучшение и т.д.) сравнения с другими стадами.
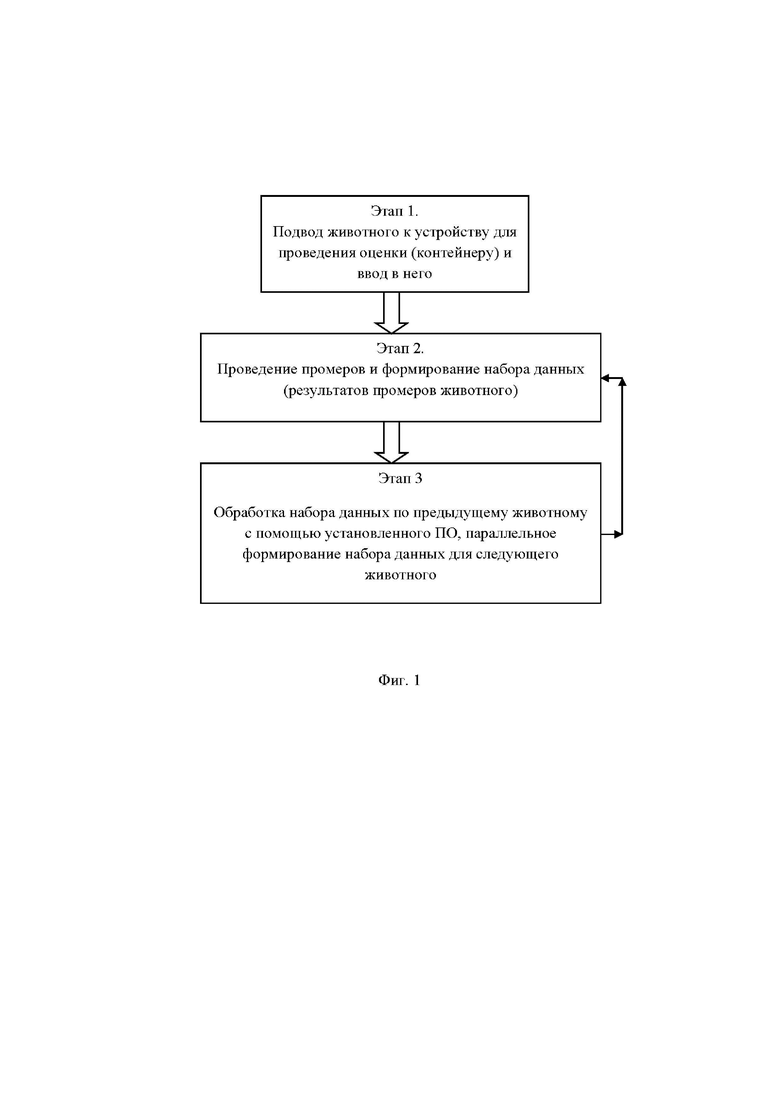
Поставленная техническая задача решается за счет выполнения оценки экстерьера движущегося животного в процессе бонитировки в предлагаемой последовательности, схематично показанной на фиг. 1, 2, 3.
На фиг. 1 показана укрупненная последовательность этапов осуществления предлагаемого способа.
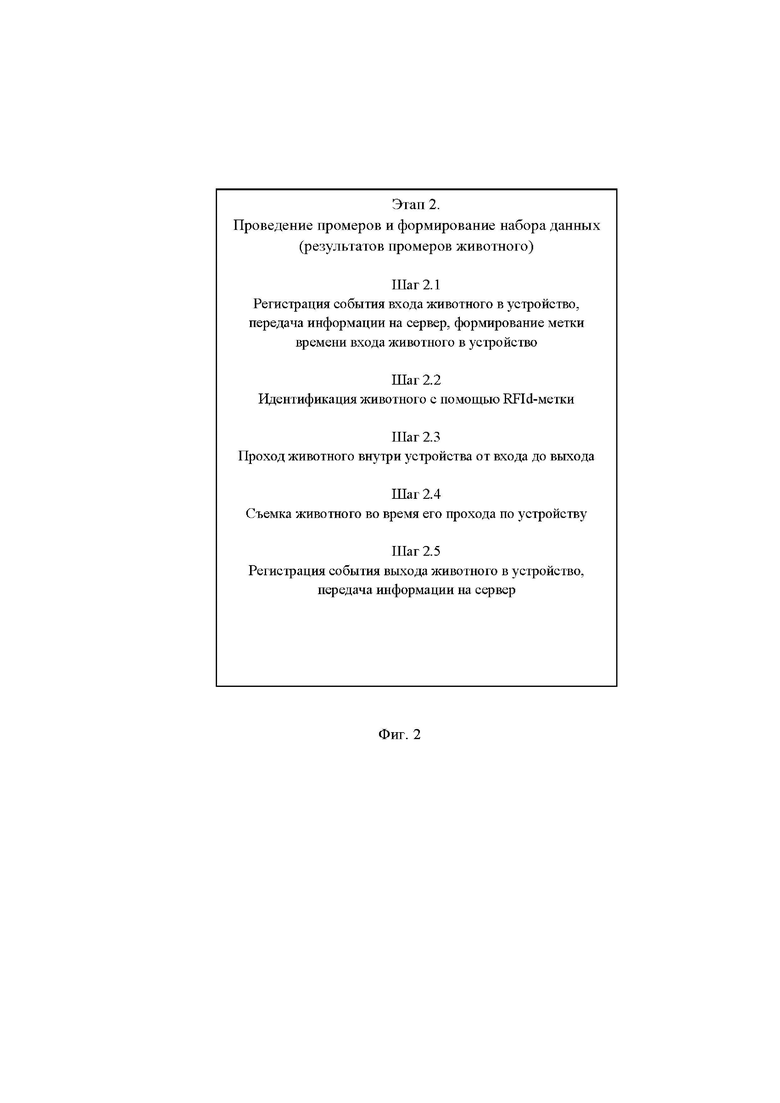
На фиг. 2 более подробно показаны мероприятия второго этапа осуществления предлагаемого способа.
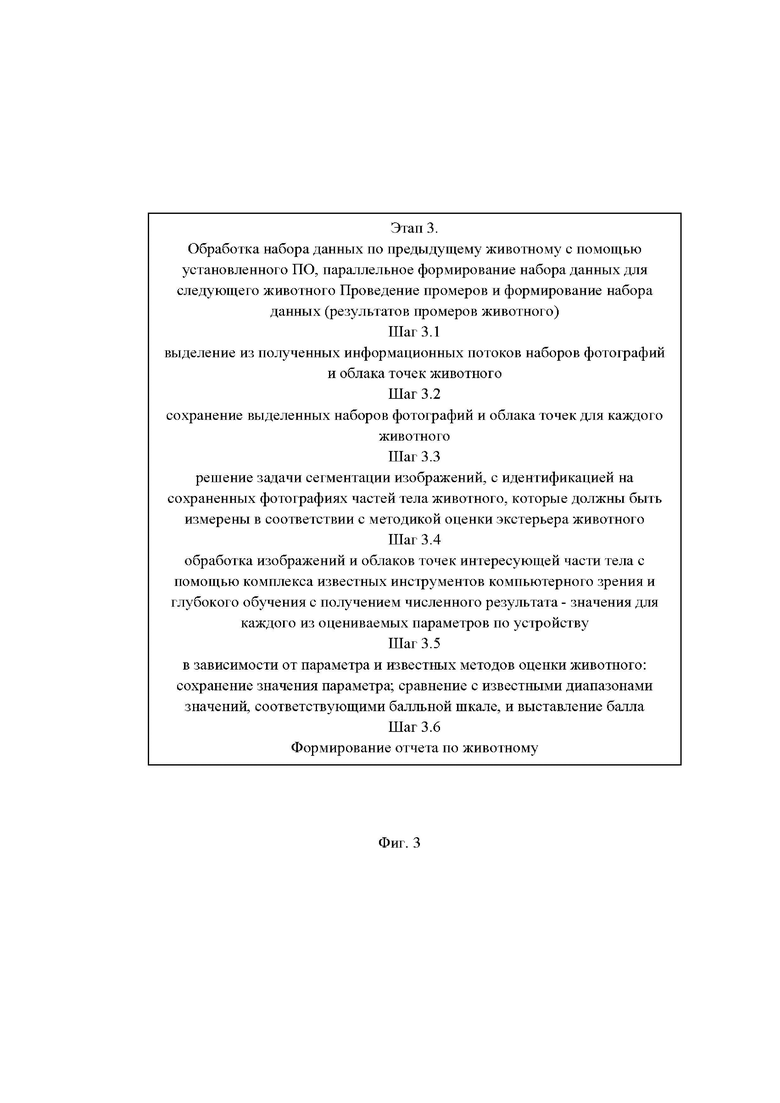
На фиг. 3 более подробно показаны мероприятия третьего этапа осуществления предлагаемого способа.
На фиг. 4 и фиг. 5 условно показано осуществление предлагаемого способа для выполнения оценки экстерьера крупного рогатого скота. При этом на фиг. 4 показано
изображение устройства и животных сбоку, а на фиг. 5 – сверху. В качестве примера, не исключающего другие варианты оцениваемых животных, схематично изображена корова.
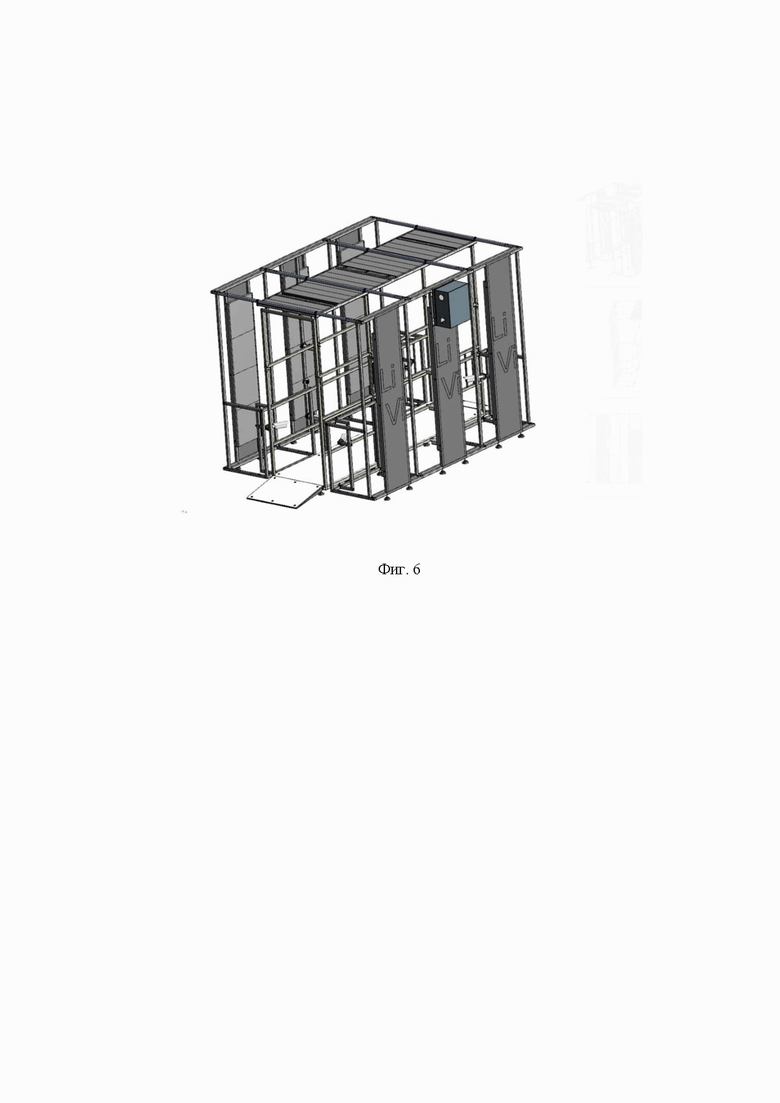
На фиг. 6 условно показано устройство, выполненное, в качестве примера, не исключающего другие варианты исполнения, в виде быстровозводимой каркасной конструкции.
Позициями на фигурах обозначены:
1 - животное (корова),
2 - устройство,
3 - видеокамеры,
4 - датчики положения.
Предлагаемый в качестве настоящего изобретения способ оценки экстерьера животным при бонитировке включает следующие этапы:
Этап 1. Подвод животного к устройству для проведения оценки экстерьера и ввод в это устройство
Конструкция устройства для оценки экстерьера животного (далее – устройства) не является предметом охраны по настоящей заявки и может быть выполнена, например, но не исключительно, в виде быстровозводимого сооружения или контейнера, оснащенного необходимой регистрирующей аппаратурой и имеющего открытый вход, свободный проход и открытый выход для животного.
На этапе 1 животное в спокойной обстановке подводят к устройству и, далее, оно заходит внутрь.
Этап 2. Формирование набора данных (результатов измерений животного)
Включает четыре подэтапа или шага (см. фиг. 2).
На первом из них происходят регистрация события входа животного в устройство с помощью датчика положения любого типа, известного из уровня техники, передача информации на сервер, формирование метки времени входа животного в устройство.
На втором шаге выполняется идентификация животного с помощью RFId-метки, что включает сканирование, оценку качества изображения, при необходимости (метка затерта) подачу сигнала оператору о необходимости ручного ввода RFId-метки с пульта управления и, наконец, идентификацию животного по RFId-метке
На третьем подэтапе выполняют формирование основных информационных потоков (потоков данных) экстерьера животного (далее – информационных потоков) в устройстве с помощью регистрирующего оборудования одновременно спереди, сзади, сверху и с обоих боков животного.
Дополнительные информационные потоки могут быть получены в неограниченном количестве при перемещении регистрирующего оборудования относительно устройства с движущимся в нем животным для получения изображений частей тела животного, необходимых для определения списка параметров бонитировки, аналогичных тем, что смотрит специалист при визуальной оценке.
Информационные потоки могут включать видеопотоки, сформированные любым устройством для съемки, известным из уровня техники: например, но не исключительно - видеокамерами, инфракрасными камерами и т.п. Информационные потоки могут включать так же облака точек, получаемых с помощью устройств, известных из уровня техники: например, но не исключительно с помощью лидаров, тепловизоров и т.д.
Животное, экстерьер которого оценивают, очевидно, не знает о выполняющихся процедурах и продолжает спокойно двигаться от входа к выходу по открытому проходу устройства. Важным преимуществом предлагаемого способа является спокойное, бесстрессовое, движение животного во время оценки его экстерьера.
В момент выхода животного из устройства выполняют регистрацию события выхода с помощью датчика положения любого типа, известного из уровня техники, и передачу информации на сервер.
На этом второй этап осуществления предлагаемого способа завершается, и переходят к третьему этапу.
Этап 3
Обработка набора данных по предыдущему животному с помощью установленного программное обеспечения (далее – ПО), параллельное формирование набора данных для следующего животного.
Этап 3 включает шесть подэтапов или шагов, осуществляемых по известным методам.
На первом шаге осуществляют выделение из полученных информационных потоков наборы фотографий и облака точек животного.
На втором шаге сохраняют выделенные наборы фотографий и облака точек для каждого животного.
На третьем шаге решают задачу сегментации изображений, идентифицируя на сохраненных фотографиях части тела животного, которые должны быть измерены в соответствии с методикой оценки экстерьера животного. Задача решается с использованием комплекса алгоритмов искусственного интеллекта, что предполагает итеративное применения различных инструментов, их наборов и комбинаций.
Одним из результатов выполнения подэтапа является построение для каждого животного объемной модели животного (3D-модели) на основе зарегистрированных информационных потоков, из которой вычисляются значения параметров для оценки.
На четвертом шаге выполняют обработку изображений и облаков точек интересующей части тела животного с помощью комплекса известных инструментов компьютерного зрения и глубокого обучения. Алгоритм выдает численный результат - значение для каждого из оцениваемых параметров.
На пятом шаге в зависимости от параметра и известных методов оценки животного: сохраняется значение параметра; выполняется сравнение с известными диапазонами значений, соответствующими балльной шкале, и выставляется балл. (сравнивается не изображение с изображениями, сравнивается значение или записывается как есть, если это, например, длина конечности).
На заключительном, шестом, шаге формируют отчет по каждому животному.
Преимуществами предлагаемого способа оценки экстерьера животного при бонитировке являются:
- повышение информативности оценки экстерьера животного при его бонитировке;
- отсутствие необходимости привлечения стороннего специалиста;
- автоматическое получение результата по каждому животному и сводной таблицы по стаду, в том числе - статистики по текущему стаду, включая статистику в динамике за интересующий период, сравнение с предыдущими измерениями, показывающими общую динамику состояния скота (ухудшение, улучшение и т.д.) сравнения с другими стадами.
Пример осуществления способа
Выполняли оценку экстерьера крупного рогатого скота (коров) в сельскохозяйственных предприятиях Республики Татарстан. Для получения сравнительных результатов промеры выполняли двумя способами: традиционным – с помощью измерительных инструментов (мерная лента, мерная палка, циркуль) – и предлагаемым в настоящей заявке. Определены количественные параметры следующих промеров коров: высота в холке, глубина груди, ширина груди, ширина в маклоках, прямая длина тазобедренной области, прямая длина туловища, обхват пясти.
Результаты измерений приведены в таблице 1.
Таблица 1 – Результаты определения экстерьерных параметров, полученных традиционным и предлагаемым способами
1
2
Полученную точность можно считать удовлетворительной.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭКСТЕРЬЕРА ПРИ ВЫПОЛНЕНИИ БОНИТИРОВКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ЖИВОТНЫХ | 2024 |
|
RU2826312C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧИСЛОВЫХ ЗНАЧЕНИЙ ЭКСТЕРЬЕРА ЖИВОТНЫХ | 2020 |
|
RU2769731C2 |
| Способ и устройство проведения промеров сельскохозяйственных животных | 2016 |
|
RU2629282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖИВОЙ МАССЫ КРУПНОГО РОГАТОГО СКОТА | 2022 |
|
RU2806290C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНОГО ИНДЕКСА ТЕЛОСЛОЖЕНИЯ И ЭКСТЕРЬЕРНО-КОНСТИТУЦИОНАЛЬНОГО ТИПА ЖИВОТНЫХ | 2020 |
|
RU2764307C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПРОМЕРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО ЖИВОТНОГО | 2019 |
|
RU2762364C2 |
| СПОСОБ ОЦЕНКИ ПАНТОВОЙ ПРОДУКТИВНОСТИ МАРАЛОВ-РОГАЧЕЙ | 2012 |
|
RU2491814C1 |
| СПОСОБ КОМПЛЕКТОВАНИЯ СТАДА МЯСНОГО СКОТА ЖЕЛАТЕЛЬНОГО ТИПА | 2017 |
|
RU2687183C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ТИПА ТЕЛОСЛОЖЕНИЯ У КРУПНОГО РОГАТОГО СКОТА | 2005 |
|
RU2294100C2 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |

Изобретение относится к сельскому хозяйству, в частности к проведению промеров животных. Способ оценки экстерьера животных при бонитировке включает получение информационных потоков экстерьера животного и их обработку с помощью алгоритмов искусственного интеллекта. При этом основные информационные потоки экстерьера получают с помощью регистрирующего оборудования одновременно спереди, сзади, сверху и с обоих боков животного, движущегося в устройстве с размещенным в нем регистрирующим оборудованием. Обработку информационных потоков выполняют комплексом алгоритмов искусственного интеллекта. Дополнительно способ включает идентификацию животного с помощью RFID-метки и формирование отчета. Изобретение обеспечивает повышение информативности оценки экстерьера животного при его бонитировке, отсутствие необходимости привлечения для этого стороннего специалиста, а также автоматическое получение результата по каждому животному. 1 з.п. ф-лы, 6 ил., 1 табл.
1. Способ оценки экстерьера животных при бонитировке, включающий получение информационных потоков экстерьера животного и их обработку с помощью алгоритмов искусственного интеллекта, отличающийся тем, что основные информационные потоки экстерьера получают с помощью регистрирующего оборудования одновременно спереди, сзади, сверху и с обоих боков животного, движущегося в устройстве с размещенным в нем регистрирующим оборудованием, обработку информационных потоков выполняют комплексом алгоритмов искусственного интеллекта, дополнительно включает идентификацию животного с помощью RFID-метки и формирование отчета.
2. Способ по п. 1, отличающийся тем, что включает получение дополнительных информационных потоков экстерьера при перемещении регистрирующего оборудования относительно устройства с движущимся в нем животным.
| Иванов Ю.А., Зарикеев А.Р | |||
| Использование искусственного интеллекта при оценке экстерьера КРС | |||
| //Техника и технологии в животноводстве | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| С | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 2023276773 A1, 07.09.2023 | |||
| US 2023260327 A1, 17.08.2023 | |||
| US 2020367470 A1, 26.11.2020 | |||
| US 9922242 B2, 20.03.2018 | |||
| US 2016125276 A1, 05.05.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧИСЛОВЫХ ЗНАЧЕНИЙ ЭКСТЕРЬЕРА ЖИВОТНЫХ | 2020 |
|
RU2769731C2 |
| Способ и устройство проведения промеров сельскохозяйственных животных | 2016 |
|
RU2629282C1 |

