Изобретение относится к области океанографических измерений и преимущественно предназначено для определения с судна скорости ветра над морской поверхностью [G01P 5/00, G01P 5/02].
В настоящее время повсеместно применяются способы автоматического вычисления скорости и направления ветра с учетом скорости и направления корабля. Получение объективной информации о воздушной среде окружающий корабль является одним из важнейших аспектов его успешного и безопасного плавания. Наличие такой информации становиться особенно необходимо при использовании с борта судна летательного аппарата: самолета, вертолета или дрона. Важнейшей из такой информации являются знания о скорости и направлении ветра. Для её получения используют датчики, основанные на различных принципах действия. В большинстве своём на судах используют механические анемометрические датчики скорости воздушного потока и флюгарки для определения его направления или акустические многокомпонентные датчики скорости воздушного потока, дающие информацию одновременно о его мгновенных значениях в горизонтальной плоскости.
При движении судна в море собственная скорость его движения фактически искажает показания датчиков, то для получения истинной скорости ветра необходимо вносить поправки на собственную скорость перемещения корпуса судна. При этом диаграмма направленности датчиков ветра не является идеально шаровой и соответственно при качке судна в показания этих измерений вносятся искажения.
Из уровня техники известен МЕТОД ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА И ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА [RU2770563, опубл.: 18.04.2022], содержащий устройство для измерения скорости и направления ветра, содержащее корпус, соединенный с гибким подвесом, средство электропитания и соединенные со средством электропитания контроллер управления, передающее устройство и акселерометр, причем передающее устройство и акселерометр соединены с контроллером управления, акселерометр расположен внутри корпуса, а центр тяжести корпуса с акселерометром совмещен с геометрическим центром корпуса; причём способ определения скорости и направления ветра с помощью устройства, в котором определение направления отклонения корпуса относительно по меньшей мере одной из сторон света осуществляют дополнительно с помощью электронного компаса, при этом значения направления отклонения от электронного компаса передают на контроллер управления.
Также известен МЕТОД, УСТРОЙСТВО И СИСТЕМА ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА
[CN113552382, опубл.: 26.10.2021], состоящий из способа измерения скорости и направления ветра, применяющегося к контроллеру в системе измерения скорости и направления ветра, причем система измерения скорости и направления ветра включает в себя: корпус, хотя бы один трос воздушного потока, инерционный блок измерения, блок получения изображения и контроллер. Каждый из канатов воздушного потока соответственно расположен на парусе или мачте корпуса, блок получения изображения расположен на стороне каждого из канатов воздушного потока рядом с корпусом, а инерционное измерение блок расположен на корпусе выше, блок инерциального измерения и блок получения изображения соответственно соединены в связи с контроллером; способ включает в себя: получение целевой последовательности изображений каждого из канатов воздушного потока, собранных блоком получения изображений, изображение цели последовательность включает в себя несколько кадров изображений; получение данных об ориентации корпуса, собранных блоком инерциальных измерений, данных об ориентации, включая направление корпуса, угол крена корпуса и угол тангажа корпуса; цель последовательность изображений и данные об ориентации вводятся в предварительно полученную модель алгоритма измерения ветра для получения информации о скорости и направлении ветра в текущей среде, где находится корпус.
Наиболее близким по технической сущности является ПРИБОР В КАБИНЕ, ОПРЕДЕЛЯЮЩИЙ СКОРОСТЬ ПАРУСНОЙ ЛОДКИ ОТНОСИТЕЛЬНО ВЕТРА - ИСПОЛЬЗУЕТ МАТЕМАТИЧЕСКУЮ КОМБИНАЦИЮ ЗАТУХАЮЩИХ ПОКАЗАНИЙ СКОРОСТИ И УГЛА [DE2930307, опубл.: 19.02.1981], содержащее показания с датчиков ветра, определяющие направление и скорость ветра относительно объекта. Лодка и датчик потока, определяющий скорость лодки по отношению к воде, и компьютер, который объединяет данные датчиков ветра со значениями скорости лодки, связанной с водой и устройство отображения значений компьютерного результата, отличающееся тем, что к лодке прикреплен датчик вектора потока, который выдает два вектора скорости лодки под определенным углом друг к другу и под определенными углами к оси лодки, данные вектора вводятся в компьютер в виде цифровых значений с определенной периодической последовательностью сканирования, так что для каждого вектора скорости лодки находится фильтр с затуханием таким образом, что теорема дискретизации выполняется в отношении последовательности дискретизации между датчиком расхода и устройством для отбора проб, и что выходные значения компьютера передаются на видеодисплейное устройство в качестве устройства отображения для координатного представления скорости лодки против истинного направления ветра, относительно угла (R или YA) между осью лодки и направлением ветра.
Основной технической проблемой аналогов и прототипа являются погрешности в измерении, вызванные искажениями ветрового поля мачтой или надстройками и качкой судна. Эти эффекты особенно сильно проявляются в процессе маневрирования судна, когда невозможно однозначно за время осреднения мгновенных значений результатов определить сторону наветренного борта, где отсутствуют эти искажения. Кроме того, при всех этих методах и устройствах предполагается использовать однозначную двухмерную градуировочную характеристику датчика без учёта его пространственного положения, изменяющегося в процессе качки судна.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является способ измерения ветра в судовых условиях с повышенной достоверностью данных о ветре в условиях маневрирования судна.
Указанный технический результат достигается за счет того, что способ измерения ветра в судовых условиях, измеряющий мгновенные значения скорости и направления воздушного потока с помощью двух расположенных побортно с разных сторон диаметральной плоскости судна датчиков указанных величин, в показания которых для получения значений истинного ветра в системе географических координат вносятся информация о скорости и направлении движения судна и эти показания усредняются за фиксированный интервал времени, а из двух полученных за этот интервал времени результатов выбирается тот, у которого направление ветра соответствует его пространственному расположению относительно диаметральной плоскости судна, отличающийся тем, что датчики осуществляют измерения мгновенных значений скорости и направления ветра, процессор осуществляет выбор датчика наветренного борта и осуществляет вычисление параметров истинного ветра с учетом параметров движения судна и угла его наклона, вызванного качкой, при этом процессор оценивает параметры маневрирования судна и в случае активного маневрирования, то есть изменения курса и скорости, за мгновенные значения истинного ветра принимаются значения характеристик истинного ветра, полученные ранее, до маневрирования, при этом если параметры движения судна стабильны, то система производит новые вычисления мгновенных значений истинного ветра с учетом пространственных положений датчиков, учитывая качку.
В частности, одновременно выполняется корректировка результатов измерений мгновенной скорости воздушного потока с учетом углов наклона судна при априорно известной пространственной диаграммы направленности датчика в вертикальной плоскости.
Краткое описание чертежей.
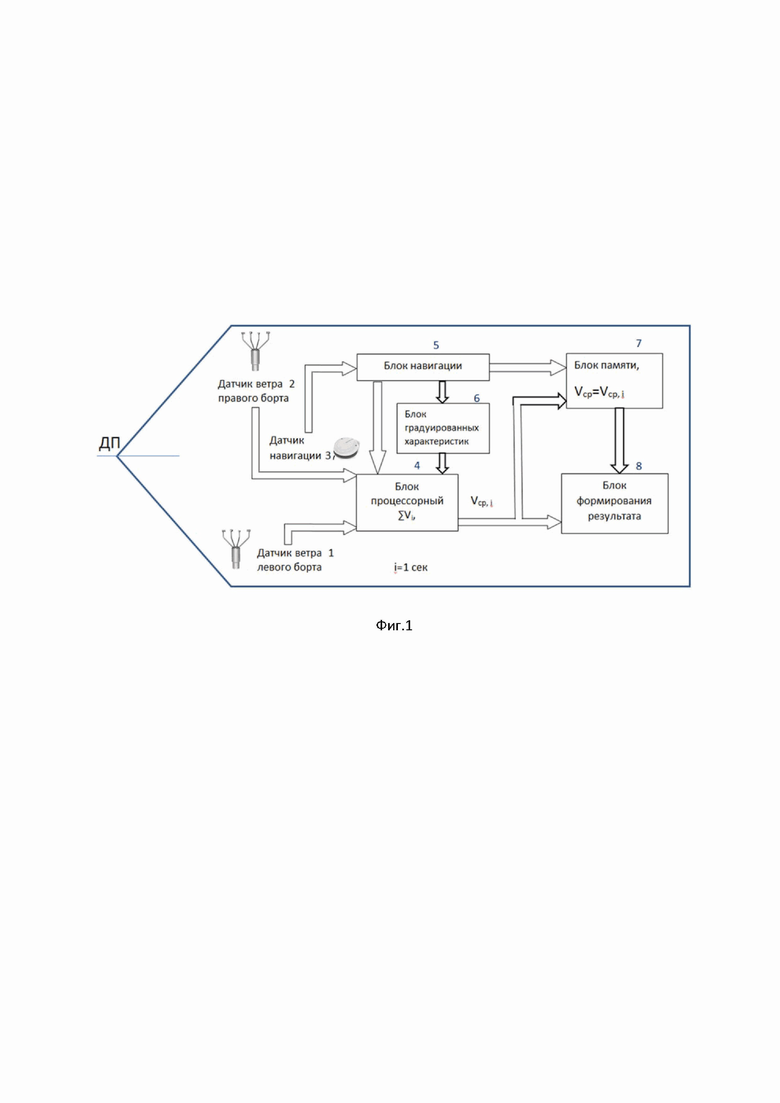
На фиг.1 показана схема способа измерения ветра в судовых условиях.
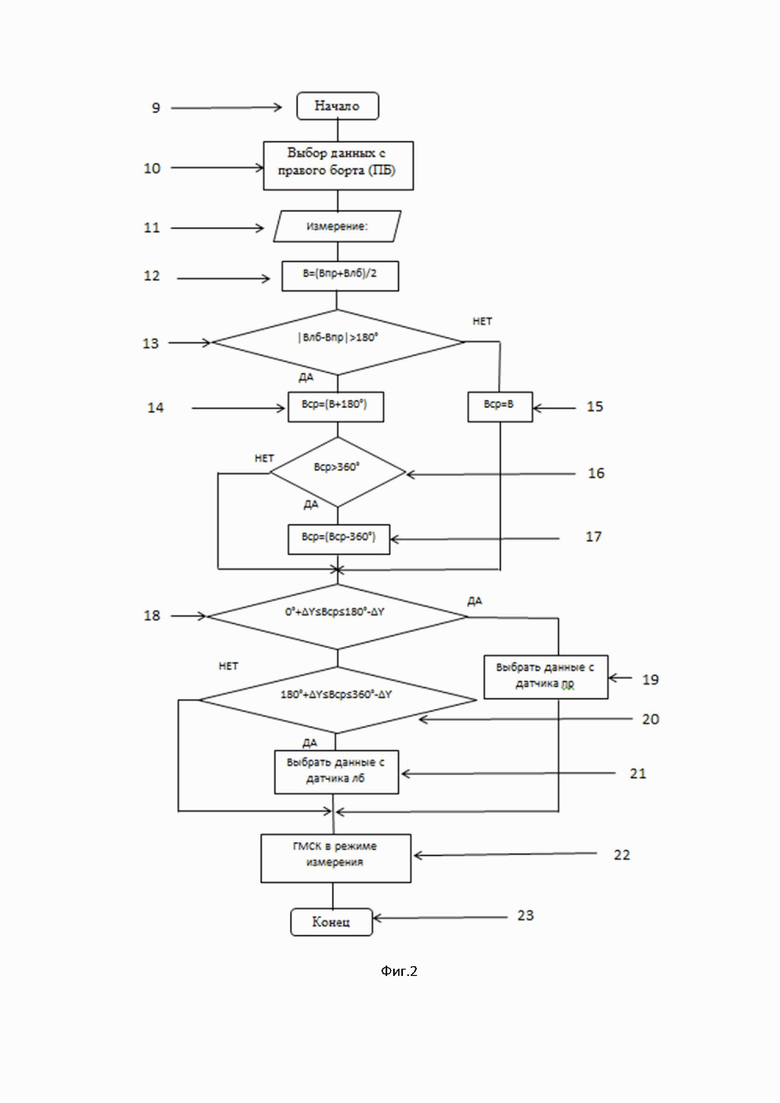
На фиг.2 показана логика работы процессора при выборе наветренного борта в виде блок-схемы способа определения наветренного борта в судовых условиях
На фигурах обозначено: 1 – датчик ветра левого бока, 2 – датчик ветра правого бока, 3 – датчик навигации, 4 – блок процессорный, 5 – блок навигации, 6 – блок градуированных характеристик, 7 – блок памяти, 8 – блок формирования результата, 9 – начало алгоритма, 10 – выбор данных направления кажущегося ветра с датчика правого борта, 11 – измерение, 12 – определение значения среднего направления кажущегося ветра как арифметическое среднее между левым и правым бортом, 13 – условие «разность углов правого и левого борта больше 180 градусов», 14 – определение «среднего значения через сумму значения наклона бортов плюс 180 градусов», 15 – равенство среднего значения и значения среднего арифметическое направление кажущегося ветра, 16 – условие «среднее значение больше 360 градусов», 17 – среднее значение равно среднее значение минус 360 градусов, 18 – условие «среднее значение в диапазоне от ΔƳ до 180°-ΔƳ градусов», 19 – выбор данных датчиков правого борта, 20 – условие «среднее значение в диапазоне от 180°+ΔƳ до 360°-ΔƳ градусов», 21 – выбор данных датчиков левого борта, 22 – гидрометеостанция корабельная (ГМСК) в режиме «измерение», 23 – конец алгоритма.
На фиг.1 обозначены ДП - диаметральная плоскость.
На фиг.2 обозначены Впр – направление кажущегося ветра с датчика правого борта, Влб – направление кажущегося ветра с датчика левого борта, ΔƳ – значение затенения (зависит от типа или проекта корабля).
Осуществление изобретения.
Суть применяемого способа измерений заключается в том, чтобы в процессе обработки сигналов с датчиков ветра исключить из результатов их измерений, те из них, которые могут быть получены при затенении датчиков от надстройки и/или мачт судна, при маневрировании судна, а сами эти результаты были получены с использованием фактических градуировочных характеристик датчиков в трехмерном пространстве путём определения пространственного положения воздушного потока относительно корпуса судна. Примером реализации заявляемого способа может служить устройство, приведенное на фиг.1.
Устройство включает в себя датчики ветра 1 и 2, расположенные побортно, датчик навигации 3, блок процессорный 4, вычисляющий среднее значения ветра и блок навигации 5, осуществляющий прием данных с датчика навигации, блок градуировочных характеристик датчиков 6, выполняющий внесение поправок при пространственном расположении датчиков с учетом качки, блок памяти 7, где происходит запоминания вычисленных параметров истинного ветра (если идет активное маневрирование, то вычисленные данные берутся из памяти данных, иначе в блок записывается новое вычисленное значение параметров истинного ветра), а также блок формирования результата измерений 8. Датчики осуществляют измерения мгновенных значений скорости и направления ветра. Блок процессорный 4 осуществляет выбор датчика наветренного борта (фигура 2) и вычисление параметров истинного ветра с учетом параметров движения судна и угла его наклона, вызванного качкой. Одновременно блок процессорный 4 оценивает параметры маневрирования судна и если судно активно маневрирует (то есть изменяет курс и скорость), то за мгновенные значения истинного ветра принимаются, те значения характеристик истинного ветра, которые были получены ранее до маневрирования. Если же параметры движения судна стабильны, то система производит новые вычисления мгновенных значений истинного ветра с учетом пространственных положений датчиков, учитывая качку.
Блок формирования результата измерений 8 формирует результат для передачи на средства отображения информации.
Алгоритм (Фиг. 2) описывается следующим образом:
Начало алгоритма 9 - осуществляется выбор данных датчиков правого борта 10 и ведётся измерение 11, определяется «значение наклона правого и левого бортов, деленое пополам» 12, далее проводится проверка условия «разность углов правого и левого борта больше 180 градусов» 13. Если условие 13 не выполняется, то это означает равенство среднего значения и значения среднего арифметическое направление кажущегося ветра 15 и переходим к условию «среднее значение в диапазоне от ΔƳ до 180°-ΔƳ градусов» 18. Если условие 13 выполняется, то определяется «среднее значение через сумму значения наклона бортов плюс 180 градусов» 14. Следующим шагом является условие «среднее значение больше 360 градусов» 16, если оно выполняется, то среднее значение равно среднее значение минус 360 градусов 17. Если условие 14 не выполняется, то переходим к условию «среднее значение в диапазоне от ΔƳ до 180°-ΔƳ градусов» 18. Если условие 18 выполняется – то надо выбрать данные датчиков правого борта 19. Если условие 18 не выполняется - то переходим к условию «среднее значение в диапазоне от 180°+ΔƳ до 360°-ΔƳ градусов» 20. При выполнении условия 20 переходим к шагу «выбор данных датчиков левого борта» 21. Если условие 20 не выполняется, то переходим к шагу «гидрометеостанция корабельная (ГМСК) в режиме измерения» 22, затем следует конец алгоритма 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СУДОВОЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ ЛЬДА | 2021 |
|
RU2767293C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ-ДРЕЙФОМЕР | 2011 |
|
RU2503014C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
Изобретение относится к области океанографических измерений и преимущественно предназначено для определения скорости ветра над морской поверхностью. Сущность изобретения заключается в том, что в способе измерения ветра в судовых условиях расчёты ветра в системе географических координат выполняются только после окончания маневрирования судна при изменении курса в пределах погрешности измерений направления ветра, а до этого за значения истинного ветра принимаются ранее рассчитанные до начала маневра показания. Технический результат – повышение достоверности данных о ветре в условиях маневрирования судна. 1 з.п. ф-лы, 2 ил.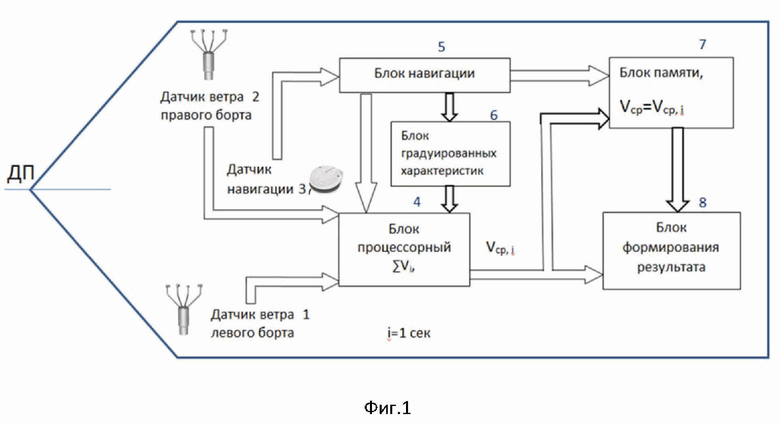
1. Способ измерения ветра в судовых условиях, измеряющий мгновенные значения скорости и направления воздушного потока с помощью двух расположенных побортно с разных сторон диаметральной плоскости судна датчиков указанных величин, в показания которых для получения значений истинного ветра в системе географических координат вносится информация о скорости и направлении движения судна и эти показания усредняются за фиксированный интервал времени, а из двух полученных за этот интервал времени результатов выбирается тот, у которого направление ветра соответствует его пространственному расположению относительно диаметральной плоскости судна, отличающийся тем, что датчики осуществляют измерения мгновенных значений скорости и направления ветра, процессор осуществляет выбор датчика наветренного борта и осуществляет вычисление параметров истинного ветра с учетом параметров движения судна и угла его наклона, вызванного качкой, при этом процессор оценивает параметры маневрирования судна и в случае активного маневрирования, то есть изменения курса и скорости, за мгновенные значения истинного ветра принимаются значения характеристик истинного ветра, полученные ранее, до маневрирования, при этом если параметры движения судна стабильны, то система производит новые вычисления мгновенных значений истинного ветра с учетом пространственных положений датчиков, учитывая качку.
2. Способ измерения ветра в судовых условиях по п.1, отличающийся тем, что одновременно выполняется корректировка результатов измерений мгновенной скорости воздушного потока с учетом углов наклона судна при априорно известной пространственной диаграмме направленности датчика в вертикальной плоскости.
| DE 2930307 A1, 19.02.1981 | |||
| US 2018031376 A1, 01.02.2018 | |||
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Корабельный измеритель ветра | 1979 |
|
SU838578A2 |
