Изобретение относится к ракетостроению, а именно к способам определения координат центра масс изделий, например форсируемых по тяге жидкостных ракетных двигателей, для которых положение центра
масс является важной задачей в определении центра масс ракеты, влияющей на точность расчетов динамики полета и управления. Эта задача является важной, также как и использование существующей стендовой базы для огневых испытаний при форсировании по тяге жидкостных ракетных двигателей.
Известны способы определения центра масс жидкостного ракетного двигателя, заключающиеся в том, что по ранее определенным координатам размещения входящих узлов и по значениям их масс, а также по положениям центров масс каждого входящего узла известным расчетным способом определялось положение центра масс жидкостного ракетного двигателя. (Справочник металлиста в пяти томах, Том 1, стр. 148-154.)
Как показывают эксперименты, расчетные методы требуют экспериментального уточнения из-за отклонений в координатах размещения узлов, входящих в конкретное изделие, а также из-за разных масс и центров масс входящих в изделие узлов из-за фактического разброса размеров и удельной плотности их материалов. Поэтому получение наиболее достоверного значения координат центра масс на основе экспериментального определения центра масс окончательно собранного изделия является наиболее предпочтительным.
Известен способ определения координат центра масс изделия, заключающийся в том, что изделие устанавливают на стол, совмещая три закоординированные точки опоры стола с точками опор изделия измеряют усилия в точках опор от веса изделия, переустановкой в горизонтальной плоскости размещения опор поворотом на угол повторно совмещая три закоординированные точки опоры стола с точками опор изделия также измеряют усилия в точках опор от веса изделия. Затем устанавливают двукратно с поворотом 90 градусов в вертикальной плоскости, определяют с помощью тензодатчиков реакции в точках опор стола с последующим вычислением координат центра масс решением системы уравнений реакций опор и координат (см. А.С. СССР №789692, кл. G01M 1/12, 1980-прототип).
Известный способ определения координат центра масс жидкостного ракетного двигателя, относящийся к расчетно-экспериментальным способам определения центра масс, позволяет с достаточной точностью определить положение центра масс жидкостных ракетных двигателей с массой, не превышающей допустимо разрешенную массу измерительным столом - стендом. Современные измерительные столы и стенды снабжены высокоточными тензодатчиками и системой автоматики юстировки изделия и программным обеспечением автоматического расчета центра масс изделий и находятся в эксплуатации с отработанными технологическими циклами. Однако для изделий большой массы, например жидкостных ракетных двигателей при форсировании их по силе тяги, а следовательно и с неизбежным повышением массы жидкостного ракетного двигателя, использование измерительного стола, рассчитанного на измерение центров масс изделий не выше, чем это позволяет данный измерительный стол - стенд, имеющийся в наличии разработчика изделия, например жидкостного ракетного двигателя, приходится пользоваться только расчетным способом определения центра масс, что по приведенным выше причинам не всегда удовлетворяет разработчика, например ракеты-носителя, использующего изделие, например жидкостный ракетный двигатель повышенной тяги и повышенной массы в качестве комплектующей единицы. Постановка задачи на создание форсированного по тяге жидкостного ракетного двигателя часто не оставляет времени, да и средств, на создание нового оборудования для испытаний такого жидкостного ракетного двигателя, в том числе и для определения центров масс.
Задачей предлагаемого изобретения является устранение вышеуказанных недостатков и расширение функциональных возможностей способа и его упрощения при использовании измерительного стола, рассчитанного на ограниченные массы изделий, позволяющего определять без значительных затрат на разработку и изготовление стенда для изделий повышенных масс.
Приведенные выше недостатки исключены в предполагаемом изобретении.
Указанная выше задача изобретения достигается тем, что в способе при каждом положении к верхней точке изделия с заранее известными координатами, прикладывают вертикальное усилие, превышающее разность ожидаемой массы изделия и проектного усилия измерительного стола с помощью динамометрической растяжки, например пружинной, с тарированной шкалой, с включением действительной вертикальной силы усилия динамометрической растяжки в систему решаемых уравнений сил, реакций, углов и координат.
Указанная выше задача изобретения достигается также тем, что в способе приложение вертикального усилия с помощью динамометрической растяжки осуществляют с дополнительной возможностью ограничения усилия с помощью ограничителей - упоров усилия динамометрической растяжки и совмещения ее функции измерителя с функцией подъемного устройства.
Указанная выше задача изобретения достигается также тем, что приложение вертикального усилия с помощью динамометрической растяжки осуществляют вдоль вертикальных осей реакции измерительного стола в закоординированных точках опор изделия при горизонтальном положении измерительного стола.
Указанная выше задача изобретения достигается также тем, что для измерительного стола с возможностью наклона поверхности измерительного стола к горизонту приложение вертикального усилия с помощью динамометрической растяжки осуществляют в начальный момент с максимальным наклоном поверхности измерительного стола к горизонту с постепенным уменьшением угла до положения обеспечения снятия усилия с упоров динамометрической растяжки.
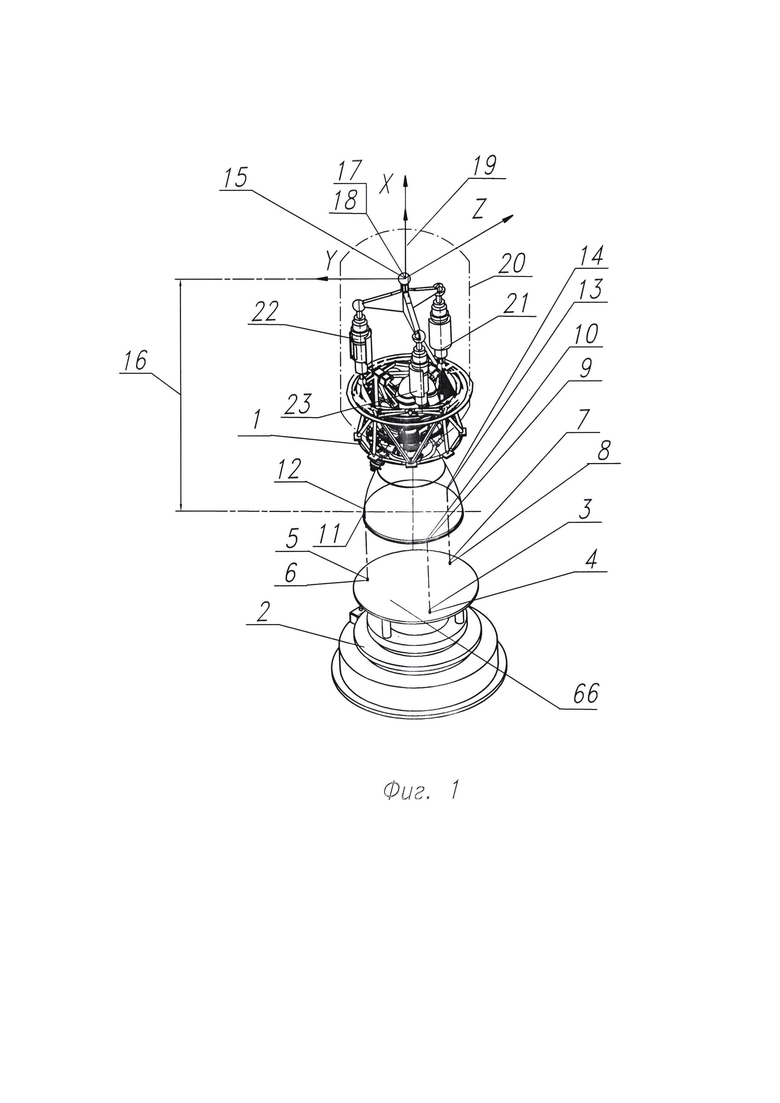
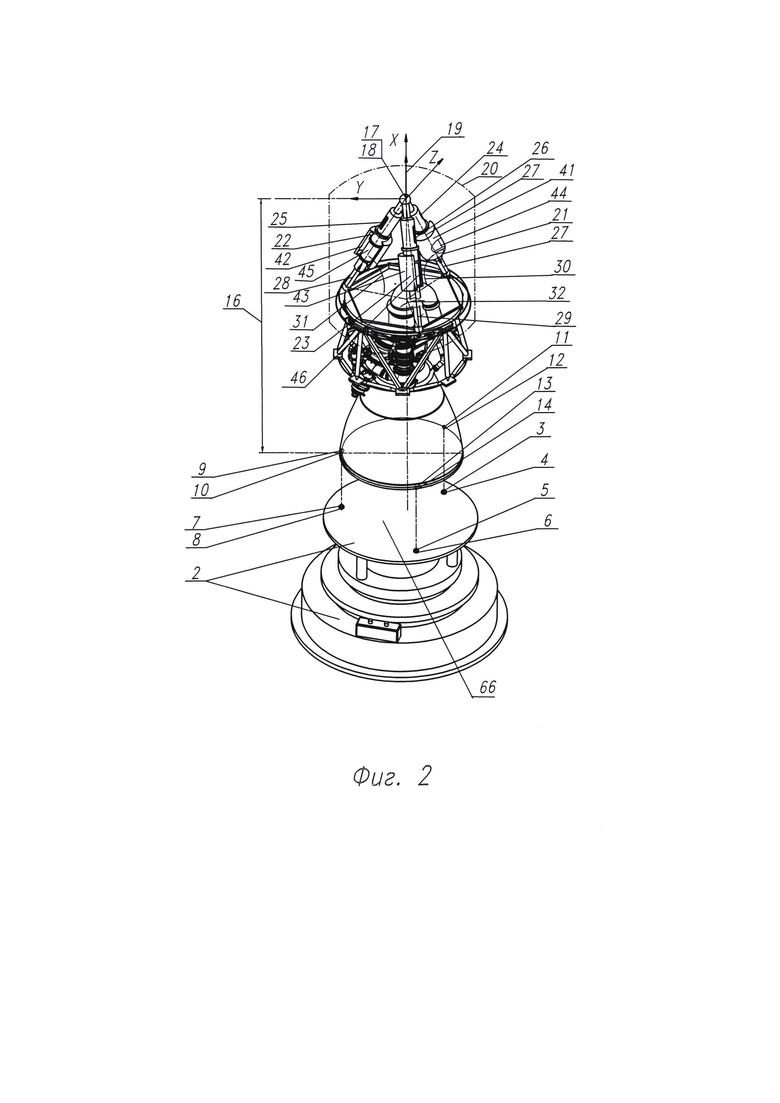
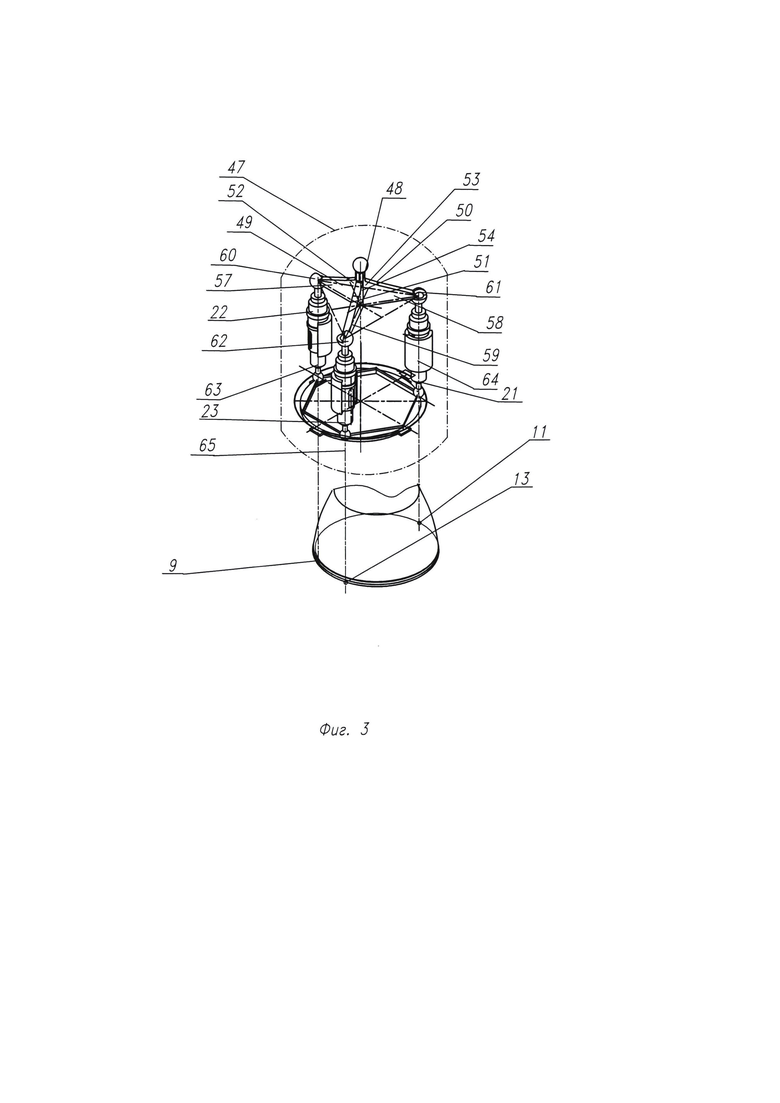
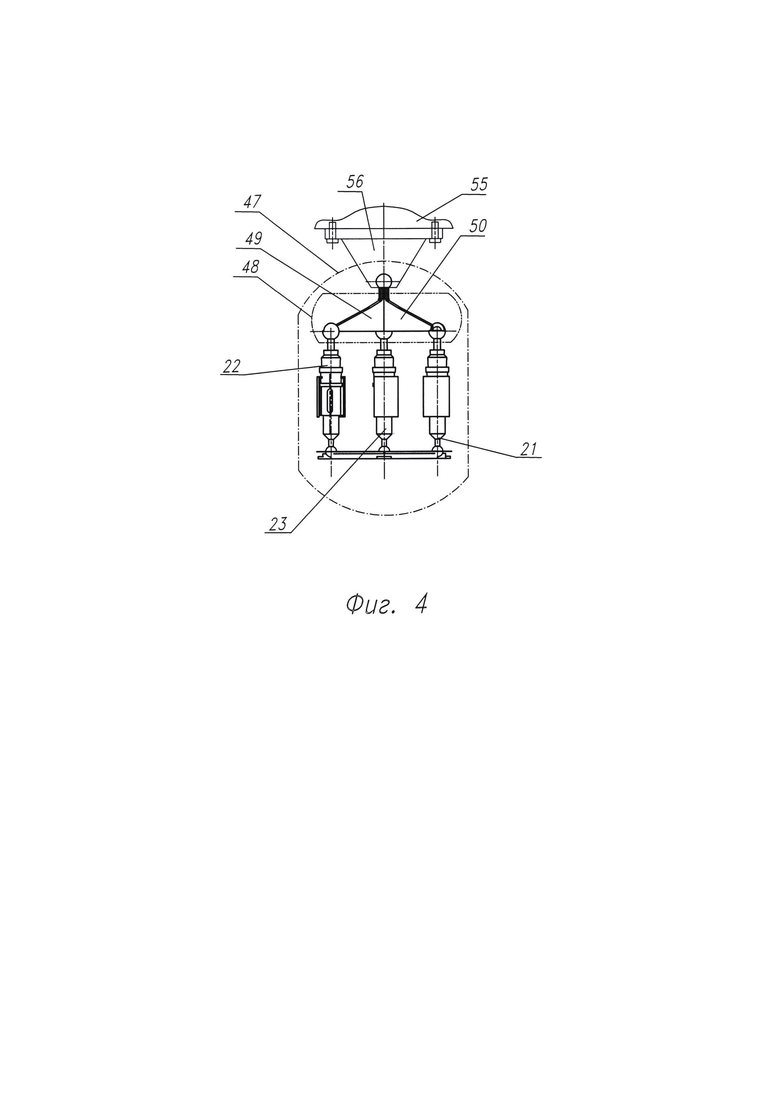
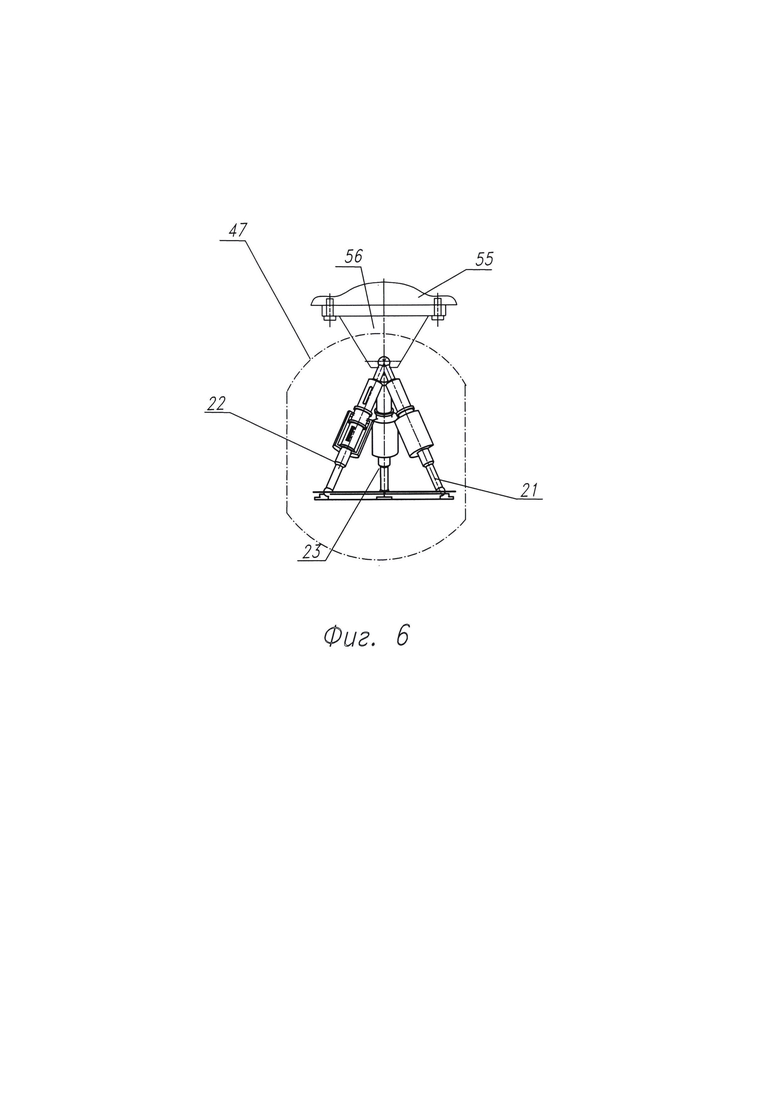
На чертеже фиг. 1-7 представлено устройство для реализация предлагаемого способа определения координат центра масс изделия (фиг. 1 - изображен в аксонометрическом виде жидкостный ракетный двигатель (изделие 1) с динамометрическими растяжками, объединенными в виде пространственного коромысла 48 с измерительным столом 2, разнесенными по высоте друг от друга для пояснения взаимодействия точек 3, 5, 7 измерительного стола 2 и соответственно точек 9, 11, 13 изделия 1 (жидкостного ракетного двигателя, фиг. 2 - изображен в аксонометрическом виде жидкостный ракетный двигатель (изделие 1) с динамометрическим узлом 20, состоящего из трех ветвей динамометрических растяжек 21, 22 и 23 с тарированными шкалами 24, 25 и 26 с измерительным столом 2, разнесенными по высоте друг от друга для пояснения взаимодействия точек 3, 5, 7 измерительного стола 2 и соответственно точек 11, 13, 9 изделия 1 (жидкостного ракетного двигателя), фиг.3 - изображен в аксонометрическом виде жидкостный ракетный двигатель (изделие 1) с измерителем усилий 47, состоящим из пространственного коромысла 48 и динамометрических растяжек 21, 22 и 23 с тарированными шкалами 24, 25 и 26, разнесенными по высоте друг от друга для пояснения взаимодействия осей симметрии 63, 64, 65 и соответственно точек 9, 11, 13, изделия 1 (жидкостного ракетного двигателя), фиг.4 - изображен измеритель усилий 47 с пространственным коромыслом 48, взаимодействующий с верхней станиной 55 опоры 56, фиг. 5 - изображен измеритель усилий 47 с тремя ветвями динамометрических растяжек 20, 21, 22, фиг. 6 - изображен измеритель усилий 47 с тремя ветвями динамометрических растяжек 20, 21, 22, взаимодействующий с верхней станиной 55 опоры 56, фиг. 7 - изображен в аксонометрическом виде жидкостный ракетный двигатель (изделие 1) с динамометрическими растяжками, объединенными в виде трех ветвей динамометрических растяжек 21, 22, 23, с наклонной поверхностью 66 измерительного стола 2 под углом наклона 67 к горизонту и разнесенными по высоте друг от друга для пояснения реакций усилий в динамометрических растяжках 21, 22, 23., где изображены следующие узлы и агрегаты:
1. Изделие;
2. Измерительный стол;
3. Первая точка опоры;
4. Первая опора измерительного стола;
5. Вторая точка опоры;
6. Вторая опора измерительного стола;
7. Третья точка опоры;
8. Третья опора измерительного стола;
9. Первая точка опоры;
10. Первая опора изделия;
11. Вторая точка опоры;
12. Вторая опора изделия;
13. Третья точка опоры;
14. Третья опора изделия;
15. Верхняя точка изделия;
16. Координата X верхней точки изделия;
17. Координата Y верхней точки изделия;
18. Координата Z верхней точки изделия;
19. Вертикальное усилие;
20. Динамометрический узел;
21, 22, 23. Динамометрическая растяжка;
24, 25, 26. Оттарированная шкала;
27, 28, 29. Усилие;
30, 31, 32. Угол;
33, 34, 35. Продольная ось симметрии;
36. Координата Y1 центра масс изделия;
37. Координата Z1 центра масс изделия;
38. Центр масс изделия;
39. Горизонтальная плоскость;
40. Вертикальная плоскость;
41, 42, 43. Ограничитель перемещений;
44, 45, 46. Измерительное устройство;
47. Измеритель усилий;
48. Пространственное коромысло;
49, 50, 51. Консольная балка;
52, 53, 54. Одна часть балки;
55. Верхняя станина опоры;
56. Опора;
57, 58, 59. Другая часть балки;
60, 61, 62. Узел балки;
63, 64, 65. Вертикальная ось симметрии;
66. Поверхность измерительного стола;
67. Угол наклона поверхности измерительного стола.
Реализация способа определения координат центра масс изделия заключается в следующем. Изделие 1, например жидкостный ракетный двигатель, устанавливают на измерительный стол 2, совмещая три закоординированные точки опор измерительного стола 2: первую точку 3 первой опоры 4 измерительного стола 2, вторую точку 5 второй опоры 6 измерительного стола 2 и третью точку 7 третьей опоры 8 измерительного стола 2 совмещают, соответственно, с первой точкой 9 первой опоры 10 изделия 1, с второй точкой 11 второй опоры 12 изделия 1, с третьей точкой 13 третьей опоры 14 изделия 1. Измеряют усилия в точке 3 опоры 4, точке 5 опоры б и в точке 7 опоры 8 от веса изделия 1, для чего к верхней точке 15 изделия 1 с заранее известными координатами X (16), Y(17), Z(18), прикладывают вертикальное усилие 19, превышающее разность ожидаемой массы изделия и проектного усилия измерительного стола 2 с помощью динамометрического узла 20, например пружинного, состоящего из трех ветвей динамометрических растяжек 21, 22 и 23 с тарированными шкалами 24, 25 и 26 с включением действительных направленных вдоль динамометрических растяжек 21, 22, 23 усилий 27, 28 и 29 общего усилия 19 динамометрического узла 20 в систему решаемых уравнений сил, реакций опор 4, 6 и 8 измерительного стола 2, углов 30, 31 и 32 продольных осей симметрии 33, 34 и 35 соответственно растяжек 21, 22 и 23 и координат точек 3, 5 и 7, а также координат 16, 15 и 18, определяют координаты Y1 (36) и Z1 (37) расположения центра масс 38 изделия 1.
Сумма реакций опор R в точках 3, 5 и 7 изделия и проекций усилий динамометрических растяжек 21, 22 и 23 на вертикальную ось X, расположенных под углами 31(α31), 32 (α32), 33 (α33) равна силе тяжести изделия G
G=R3+R5+R7+P21⋅sinα31+P22⋅sinα32+P23⋅sinα33
Равенство момента силы тяжести и моментов реакций опор и усилий растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 7
G*C07+=R3 C3 + R5 C5+C21*P21⋅sinα31+ C22*P22⋅sinα32+ C23*P23*sinα33
Равенство момента силы тяжести и моментов реакций опор и усилий растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 5
G*C05+=R3 С3+R7 C7+ C21*P21⋅sinα31+ C22*P22⋅sinα32+C23*P23⋅sinα33
Равенство момента силы тяжести и моментов реакций опор и усилий растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 3
G*C03+=R5 C5+R7 C7+C21*P21⋅sinα31+C22*P22⋅sinα32+C23*P23⋅sinα33
Равенство момента силы тяжести и моментов реакций опор и усилий растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 7
G*C0+=R3 C3+R5 С5+C21*P21⋅sinα31+C22*P22*sinα32+C23*P23*sinα33
Равенство моментов силы тяжести и моментов реакций опор и усилий растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 21
G*C0+=R3 C3+ R5 С5+ R7 С7+ C22*P22⋅sinα32+C23*P23⋅sinα33
Равенство момента силы тяжести и моментов проекций реакций опор и растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 22
G*C0+=R3 C3+ R5 C5+R7 C7+ C21*P21⋅cosα31+C23*P23⋅cosα33
Равенство момента силы тяжести и моментов проекций реакций опор и растяжек относительно одной из точек приложения реакций опор и растяжек, в этом уравнении, относительно точки 23
G*C0+=R3 C3+R5 C5+R7 C7+C21*P21⋅cosα31+C22*P22⋅cosα32
Уравнения статики представляют алгебраические суммы моментов реакций опор с тензодатчиками в опорных точках, моментов реакций показаний динамометров растяжек и моментов силы тяжести изделия относительно точек приложения реакций измерительного стола.
Переустановив в горизонтальной плоскости 39 размещения точек 3, 5, 7 опор 4, 6, 8 на 120 градусов, повторно совмещают три закоординированные точки измерительного стола 2 и изделия 1: первую точку 3 опоры 4 измерительного стола 2 с второй точкой 11 опоры 12 изделия 1, вторую точку 5 опоры 6 измерительного стола 2 с третьей точкой 13 опоры 14 изделия 1, третью точку 7 опоры 8 измерительного стола 2 с первой точкой 9 опоры 10 изделия 1 также измеряют усилия в точках опор от веса изделия 1. Из трех измеренных значений координат Y1, Z1 определяют среднюю величину Y1cp, Z1cp. Затем устанавливают двоекратно с поворотом 90 градусов в вертикальной плоскости 40, определяют с помощью тензодатчиков реакции R3, R5, R7 в точках 3, 5, 7 опор 4, 6, 8 измерительного стола 2 с последующим вычислением координаты X1 центра масс решением системы уравнений реакций опор и координат.
Один из возможных вариантов выполнения динамометрического узла 20, совмещающего функции измерителя усилий и подъемного устройства, включает дополнительные ограничители перемещений 41, 42, 43 на динамометрических растяжках 21, 22, 23 работает следующим образом. Пока изделие 1 с весом, превышающим допустимый вес изделия 1 для установки на измерительный стол 2, устанавливают на измерительный стол 2 с помощью динамометрического узла 20, ограничители перемещений 41, 42, 43 разгружают динамометрические растяжки 21, 22 и 23 с оттарированными шкалами 24, 25 и 26 от действия на них превышающих их допустимых усилий от веса изделия 1, не нарушая упругих свойства измерительных устройств 44,45,46 динамометрических растяжек 21, 22 и 23. После установки изделия 1 на измерительный стол 2 динамометрический узел 20 перемещают по направлению к измерительному столу 2 вдоль оси X и фиксируют в положении, исключающем воздействие на измерительный стол 2 превышающим его возможности по восприятию веса изделия 1, но позволяющем измерить дополнительные усилия, компенсирующие избыток веса, в направлении оси X.
Второй из возможных вариантов выполнения динамометрического узла 20, выполняющего функции измерителя усилий 47, включает дополнительное жесткое пространственное коромысло 48 с тремя консольными балками 49, 50, 51, одними частями 52, 53, 54 закрепленных жестко с верхней станиной 55 опоры 56 измерительного стола 2, а другие части 57, 58, 59 консольных балок 49, 50, 51 снабжены узлами 60, 61, 62, расположенными на одних вертикальных осях симметрии 63, 64, 65, проходящих через точки 9, 11, 13 изделия 1. Система уравнений расчета центра масс изделия 1 упрощается из-за равенства 90° углов α31, α32, α33 (sinα31=1, sinα32=1, sinα33=1), так как не требуется измерение углов. α31, α32, α33.
G=R3+R5+R7+Р21+Р22+Р23
Третий из возможных вариантов выполнения способа определения координат центра масс изделия 1, для измерительного стола 2 с возможностью наклона поверхности 66 измерительного стола 2 под углом наклона 67 к горизонту с динамометрическим узлом 20, выполняющим функции измерителя усилий, заключается в том, что приложение вертикального усилия с помощью динамометрических растяжек 21, 22, 23 осуществляют в начальный момент с максимальным и в дальнейшем с постепенным уменьшением угла 67 до положения обеспечения снятия усилия с ограничителей перемещений 41, 42, 43 динамометрических растяжек 21, 22, 23. В этом случае расширяется диапазон увеличения масс изделий 1 для измерительного стола 2 с ограничением массы измеряемых изделий 1, так как из-за наклона на угол 67 измерительного стола 2 измерительным столом 2 воспринимается только нормальная составляющая веса изделия 1 на измерительный стол 2. Значительная часть веса воспринимается динамометрическим узлом 20 до тех пор, пока не обеспечится снятие усилия с ограничителей перемещений 41, 42, 43 динамометрической растяжки 20, тем самым не произойдет повышения воздействия части веса изделия на измерительный стол 2 так, что не превысит ограничений для измерительного стола 2.
Применение предлагаемого способа определения координат центра масс изделия позволит расширить его функциональные возможности и упростить определение центра масс изделия при использовании измерительного стола, рассчитанного на ограниченные массы изделий, позволяющего определять без значительных затрат на разработку и изготовление стенда для вновь разрабатываемых изделий повышенных масс, например форсируемых по тяге жидкостных ракетных двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ ОБЪЕКТОМ | 2017 |
|
RU2670351C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| Устройство для исследования аэродинамических нагрузок модели автопоезда | 1989 |
|
SU1677563A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| СПОСОБ ПСИХОФИЗИОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2126649C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА И НАДЕЖНОСТИ ПОКРЫТИЙ ПОВЕРХНОСТЕЙ ПРОМЫШЛЕННЫХ ИЗДЕЛИЙ | 2005 |
|
RU2296978C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| Способ определения координат центра масс изделия | 1990 |
|
SU1772636A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |


Изобретение относится к ракетостроению, а именно к способам определения координат центра масс изделий. Способ определения координат центра масс изделия заключается в том, что изделие устанавливают на измерительный стол, совмещая три закоординированные точки опоры измерительного стола с точками опор изделия и переустановкой в горизонтальной плоскости размещения точек опор изделия на 120 градусов повторно совмещая три закоординированные точки опоры измерительного стола с точками опор изделия. Устанавливают изделие двукратно с поворотом на 90 градусов в вертикальной плоскости. Определяют с помощью тензодатчиков реакции в точках опор измерительного стола с последующим вычислением координат центра масс изделия. При каждом положении к верхней точке изделия с заранее известными координатами прикладывают вертикальное усилие, превышающее разность ожидаемой массы изделия и проектного усилия измерительного стола с помощью динамометрической растяжки. Достигается повышение точности определения центра масс изделия. 3 з.п. ф-лы, 7 ил.
1. Способ определения координат центра масс изделия, заключающийся в том, что изделие устанавливают на измерительный стол, совмещая три закоординированные точки опоры измерительного стола с точками опор изделия и переустановкой в горизонтальной плоскости размещения точек опор изделия на 120 градусов повторно совмещая три закоординированные точки опоры измерительного стола с точками опор изделия, и устанавливая двукратно с поворотом на 90 градусов в вертикальной плоскости, определяя с помощью, например, тензодатчиков реакции в точках опор измерительного стола с последующим вычислением координат центра масс изделия решением системы уравнений реакций опор и координат, отличающийся тем, что в нем при каждом положении к верхней точке изделия с заранее известными координатами прикладывают вертикальное усилие, превышающее разность ожидаемой массы изделия и проектного усилия измерительного стола с помощью динамометрической растяжки, например пружинной, с тарированной шкалой, с включением действительной вертикальной силы усилия динамометрической растяжки в систему решаемых уравнений сил, реакций, углов и координат.
2. Способ определения координат центра масс изделия по п.1, отличающийся тем, что приложение вертикального усилия с помощью динамометрической растяжки осуществляют с дополнительной возможностью ограничения усилия с помощью ограничителей-упоров усилия динамометрической растяжки и совмещения ее функции измерителя с функцией подъемного устройства.
3. Способ определения координат центра масс изделия по п.1, отличающийся тем, что приложение вертикального усилия с помощью динамометрической растяжки осуществляют вдоль вертикальных осей реакции измерительного стола в закоординированных точках опор изделия при горизонтальном положении измерительного стола.
4. Способ определения координат центра масс изделия по п.2, отличающийся тем, что для измерительного стола с возможностью наклона поверхности измерительного стола к горизонту приложение вертикального усилия с помощью динамометрической растяжки осуществляют в начальный момент с максимальным наклоном поверхности измерительного стола к горизонту с постепенным уменьшением угла до положения обеспечения снятия усилия с упоров динамометрической растяжки.
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| ПЕРЕНОСНОЕ ГРУЗОПРИЕМНОЕ УСТРОЙСТВО ЭЛЕКТРОННО- ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 0 |
|
SU248278A1 |
| АНТИСМЫСЛОВЫЕ ОЛИГОНУКЛЕОТИДЫ В КАЧЕСТВЕ ИНГИБИТОРОВ СИГНАЛЬНОГО ПУТИ TGF-R | 2015 |
|
RU2717454C2 |
| CN 203858064 U, 01.10.2014 | |||
| CN 203949788 U, 19.11.2014. | |||

