аналитического определения трех координат центра масс. Способ основан на измерении реакции Р в наклонных тягах пар и смещении центра масс от центра стола и измерении F - горизонтальной составляющей реакции Р.
Недостатками указанного способа являются малая точность и невысокие эксплу- атационные возможности в части определения координат центров масс изделий сложной формы, т.к., положение центра масс определяется относительно наружной поверхности изделия с точностью до линейных погрешностей установки изделия на столе и только для изделий, имеющих установочные поверхности для размещения на плоскости стола.
Целью предлагаемого способа определения координат центра масс является гто- вышение точности и расширение эксплуатационных возможностей способа е части определения координат центра масс изделий произвольной формы.
С указанной целью в способе определения координат центра масс изделия, заключающемся в том, что закрепляют изделие на горизонтальной балке-платформе, уравновешивают ее на двух опорах, измеряют реакцию силы тяжести, приложенную к одной из опор,и аналитически определяют значение координат центра масс изделия по величине силовой реакции и расстоянию между опорами, на изделии выполняют три пары крепежных гнезд, изделие закрепляют на горизонтальной балке-платформе посредством двух вертикальных штанг, измерения производят трижды, или закрепляя изделие за разные пары гнезд или/и изменяя длину вертикальных штанг так, что вектор направления горизонтальной оси балки-платформы параллелен соответственно каждой оси трехмерной системы координат изделия.
Для дополнительного увеличения точности в предложенном способе в качестве трехмерной системы координат изделия (произвольной, но не вырожденной в плоскую или одноосевую) используют ортогональную. При изменении относительной длины вертикальных штанг центр крепежного гнезда (опоры изделия,относительно которой производится замер силовой реакции) и центр масс изделия могут быть установлены на один горизонтальный уровень, - эта операция при повторном измерении (когда положение центра масс уже известно) также позволяет увеличить точность измерений.
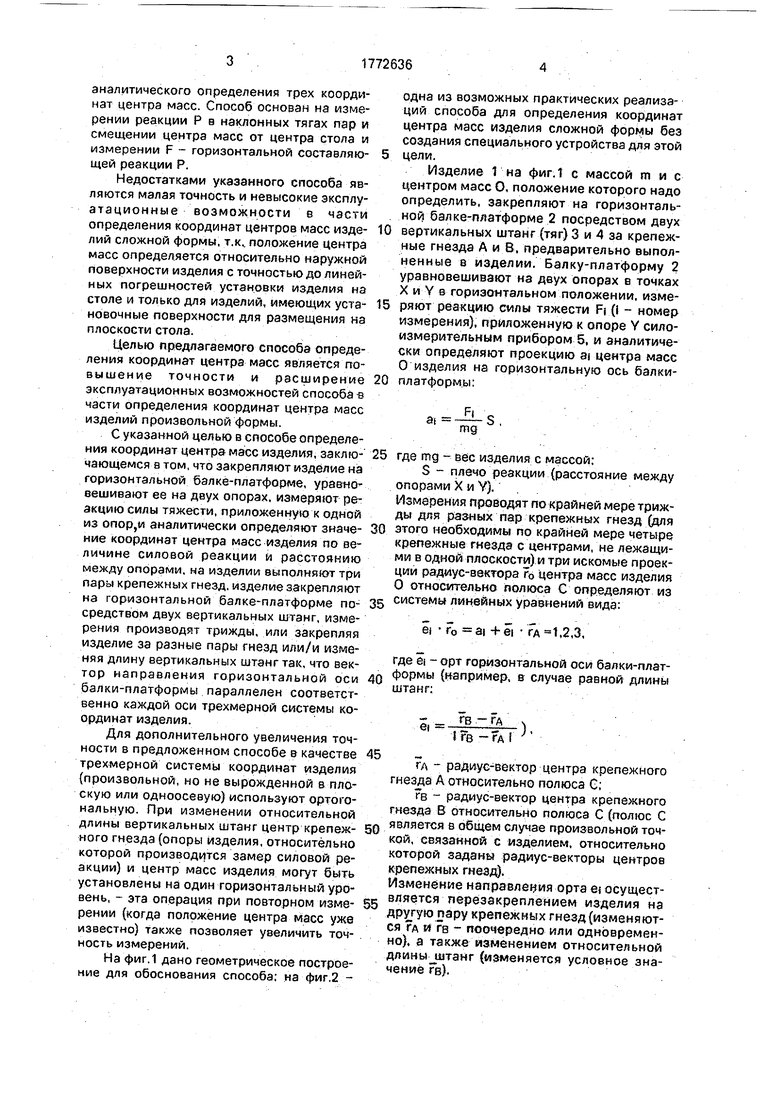
На фиг.1 дано геометрическое построение для обоснования способа; на фиг.2 одна из возможных практических реализаций способа для определения координат центра масс изделия сложной формы без создания специального устройства для этой
цели.
Изделие 1 на фиг.1 с массой тис центром масс О, положение которого надо определить, закрепляют на горизонтальной балке-платформе 2 посредством двух
вертикальных штанг (тяг) 3 и 4 за крепежные гнезда А и В, предварительно выполненные в изделии. Балку-платформу 2 уравновешивают на двух опорах е точках X и Y в горизонтальном положении, измеряют реакцию силы тяжести Fi (i - номер измерения), приложенную к опоре Y сило- измерительным прибором 5, и аналитически определяют проекцию at центра масс О изделия на горизонтальную ось балкиплатформы:
Э(
FI mg
S,
где mg - вес изделия с массой:
S - плечо реакции (расстояние между опорами X и Y),
Измерения проводят по крайней мере трижды для разных пар крепежных гнезд (для
этого необходимы по крайней мере четыре крепежные гнезда с центрами, не лежащими в одной плоскости) и три искомые проекции радиус-вектора 70 центра масс изделия О относительно полюса С определяют из
системы линейных уравнений вида:
ei а Н- Јi ГА 1,2,3,
где ё - орт горизонтальной оси балки-плат- формы (например, в случае равной длины
штанг:
a-.g-LV ).
t re - ГА
ГА - радиус-вектор центра крепежного гнезда А относительно полюса С;
гв - радиус-вектор центра крепежного гнезда В относительно полюса С (полюс С
является в общем случае произвольной точкой, связанной с изделием, относительно которой заданы радиус-векторы центров крепежных гнезд). Изменение направления орта е осуществляется перезакреплением изделия на другую пару крепежных гнезд (изменяются д к гв - поочередно или одновременно), а также изменением относительной длины штанг (изменяется условное значение FB).
Погрешность 5ai определения величины ai вследствие неточности установки штанги 4 определяется по формуле:
б 3|
с sin у
R
X
(3
/ А
( L+6L
Л
где Д - линейная погрешность установки штанги 4 в вертикальное положение. - см. фиг.1 (безразмерная величина отношения А к c.R.L считается величиной первого порядка малости);
L - длина штанги 4, определяемая с погрешностью д L;
у- угол АОВ (между линиями, соединяющими центр гнезда А с центром масс О и центром гнезда В);
R - проекция АВ на горизонтальную ось балки-платформы;
с - расстояние АО (между центром гнезда А и центром масс О).
Предложенный способ позволяет уменьшить погрешность вследствие неточности А установки одной из штанг в вертикальное положение до величины второго порядка малости (последняя формула). Другая штанга 3 в процессе многочисленных измерений должна быть жестко и точно фиксирована относительно вертикали.
Дополнительного увеличения точности измерений можно добиться путем такого выбора крепежных гнезд и, соответственно, направлений е. которые обеспечивают лучшую обусловленность системы линейных уравнений для определения г0. Для этого три направления ei должны быть взаимно ортогональны, т.е. быть параллельны осям ортогональной системы координат, связанной с изделием.
Точность измерений может быть увеличена также путем повторных измерений с измененной длиной штанг для улучшения обусловленности системы линейных уравнений (задание ei), а также для вывода центра масс О на один горизонтальный уровень с центром крепления А: это приводит к уменьшению значения у (и значения sin у) и, как следствие, уменьшению погрешности
д а. Измерения с измененной длиной штанг позволяют также сократить количество необходимых крепежных гнезд изделия с чр- тырех до трех (если они не лежат с центром
масс изделия в одной плоскости) и количество перезакреплений изделия с трех до двух.
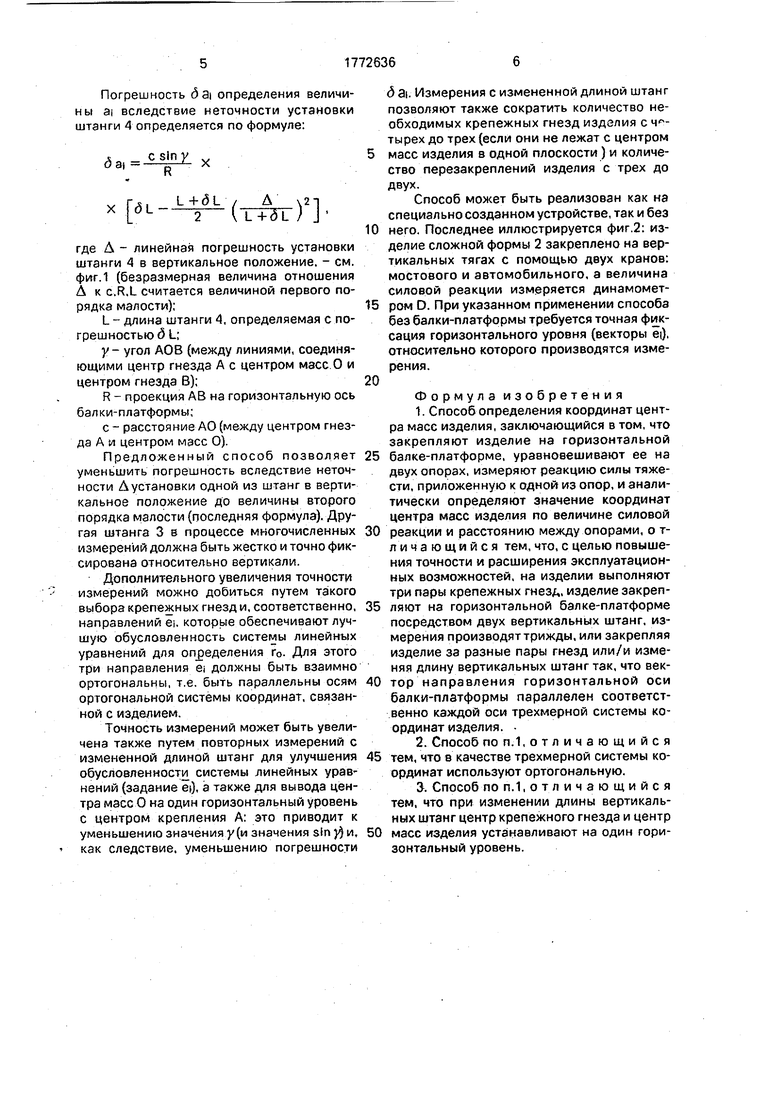
Способ может быть реализован как на специально созданном устройстве, так и без
него. Последнее иллюстрируется фиг.2: изделие сложной формы 2 закреплено на вертикальных тягах с помощью двух кранов: мостового и автомобильного, а величина силовой реакции измеряется динамометром D. При указанном применении способа без балки-платформы требуется точная фиксация горизонтального уровня (векторы е$, относительно которого производятся измерения.
Формула изобретения
1.Способ определения координат центра масс изделия, заключающийся в том, что закрепляют изделие на горизонтальной
балке-платформе, уравновешивают ее на двух опорах, измеряют реакцию силы тяжести, приложенную к одной из опор, и аналитически определяют значение координат центра масс изделия по величине силовой
реакции и расстоянию между опорами, о т- личающийся тем, что, с целью повышения точности и расширения эксплуатационных возможностей, на изделии выполняют три пары крепежных гнезд, изделие закрепляют на горизонтальной балке-платформе посредством двух вертикальных штанг, измерения производят трижды, или закрепляя изделие за разные пары гнезд или/и изменяя длину вертикальных штанг так, что вектор направления горизонтальной оси балки-платформы параллелен соответственно каждой оси трехмерной системы координат изделия.
2.Способ по п.1,отличающийся тем, что в качестве трехмерной системы координат используют ортогональную.
3 Способ по п.1 .отличающийся тем, что при изменении длины вертикальных штанг центр крепежного гнезда и центр масс изделия устанавливают на один горизонтальный уровень.
Фие.1
Редактор
Составитель Е.Буянов Техред М.Моргентал
Фиг.2. Корректор Т.Иванова
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
Использование: для машиностроения, измерительной техники и исследований в области точной механики, преимущественно для изделий сложной формы. Цель: повышение точности и расширение эксплуатационных возможностей. Сущность изобретения: в способе,заключающемся в том, что закрепляют изделие на горизонтальной балке-платформе, уравновешивают ее на двух опорах, измеряют реакцию силы тяжести, приложенную к одной и-з опор,и аналитически определяют значеИзобретение относится к машиностроению, точной механике, измерительной технике и может использоваться для определения координат центра масс изделий сложной формы. Известно по устройствам использование для крепления изделия стола (плат- формы, рамы и т.п.), постоянно уравновешиваемого относительно измерительной оси посредством подвижного противовеса и перемещаемого вместе с ние координат центра масс изделия по величине силовой реакции и расстоянию между опорами, на изделии выполняют три пары крепежных гнезд, закрепляют изделие на горизонтальной балке-платформе посредством двух вертикальных штанг, измерения производят трижды, или закрепляя изделие за разные пары гнезд или/и изменяя длину вертикальных штанг так, что вектор направления горизонтальной оси балки-платформы параллелен соответст: венно каждой оси трехмерной системы координат изделия. Для дополнительного увеличения точности в качестве трехмерной системы координат изделия используют ортогональную. Точность при повторном измерении может быть увеличена, если при изменении длины вертикальных штанг центр одного из крепежных гнезд и центр масс изделия установить на один горизонтальный уровень. Положительный эффект: снижение влияния неточности установки изделия до величин второго порядка малости, возможность измерения координат центра масс изделий сложной формы, возможность реализации способа без специального устройства. 2 з.п ф-лы, 2 ил. изделием посредством ходового винта (винтов). Известно по способу, принятому за прототип, использование для определения координат центра масс изделия операций установки изделия на столе, закрепленном на раме, подвешивания рамы на наклонных тягах, измерения горизонтальных силовых реакций со стороны рамы, поворота стола вместе с изделием относительно рамы в горизонтальной и вертикальной плоскостях и VJ XI Ю О СА О
| Устройство для определения центра тяжести тел | 1972 |
|
SU657292A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ МОДЕЛЕЙ СУДОВ | 1967 |
|
SU214176A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения координат центра тяжести изделий | 1976 |
|
SU658417A1 |
