Изобретение относится к области авиации и может быть использовано для создания скоростных вертолётов одновинтовой схемы без рулевого винта.
Из уровня техники известен вертолёт, выполненный по одновинтовой схеме, в котором роль рулевого винта выполняют стабилизаторы, расположенные вертикально в зоне вращения несущего винта, установленные на поперечной балке, которая установлена на конце хвостовой балки, отличающаяся тем, что стабилизаторы имеют возможность поворачиваться вокруг продольной оси поперечной балки с помощью проводки управления и шарнира, хвостовая балка имеет возможность менять свое положение относительно несущего винта с помощью проводки управления и другого шарнира, а поперечное сечение хвостовой балки по всей длине выполнено в виде крыла (RU 2266237 С2, 20.12.2005).
Такое выполнение средств компенсации реактивного момента несущего винта не представляется эффективным в виду того, что через стабилизаторы, а также по боковой поверхности хвостовой балки, проходит только часть воздушного потока от несущего винта, и, соответственно, компенсации будет подлежать только часть реактивного крутящего момента.
Наиболее близким аналогом заявленного изобретения является одновинтовой вертолет, содержащий фюзеляж, силовую установку с двигателями и главным редуктором, несущий винт, установленный на валу главного редуктора, и средства компенсации реактивного момента несущего винта, отличающийся тем, что агрегаты силовой установки размещены на поворотной платформе, которая установлена на потолочной панели фюзеляжа с возможностью поворота относительно своей вертикальной оси и снабжена приводом, при этом ось вращения поворотной платформы смещена относительно центра масс вертолета, а вал несущего винта расположен наклонно относительно вертикали, причем длина и угол наклона относительно вертикали вала несущего винта и смещение оси вращения поворотной платформы относительно центра масс выбраны из условия обеспечения компенсации реактивного момента несущего винта на фюзеляже, при повороте платформы на необходимый угол, в зависимости от режима полета, за счет смещения центра втулки несущего винта относительно центра масс вертолета и соответствующего изменения плеча действия силы тяжести относительно оси вала несущего винта (RU 2588257 С1, 27.06.2016).
Недостатком данного технического решения является практическая невозможность подведения механического управления к автомату перекоса и, соответственно, несущему винту вертолёта вследствие изменения углового положения поворотной платформы и необходимости применения механических тяг переменной длины и сложной формы. Управление автоматом перекоса и, соответственно, несущим винтом в данной конструкции осуществляется электрогидравлическими бустерами, соединенными электрическими проводами с компьютерным центром, управляемым из кабины пилотов. Управление несущим винтом программным методом связано с поворотом поворотной платформы, которая поворачивается за счёт дистанционно-управляемого электродвигателя. В результате из-за отсутствия возможности механического управления и сложности разработки и отладки программного управления одновременно поворотом поворотной платформы и движениями автомата перекоса по высоте и углу наклона его тарелки, надёжность и манёвренность данного вертолёта недостаточно высоки.
Любой вертолёт обладает способностью не только вертикально подниматься в воздух за счёт создания подъёмных сил на каждой из своих лопастей, но и возможностью горизонтального полёта за счёт наклона плоскости несущего винта и образования за счёт этого наклона горизонтальной составляющей силы тяги, которая и обеспечивает горизонтальную скорость вертолёта. В процессе увеличения горизонтальной скорости вертолёта растёт разница в скорости набегающего потока на лопасти, вращающейся навстречу направлению полёта (на наступающей лопасти) и лопасти, вращающейся в противоположную от направления полёта сторону (на отступающей лопасти). Разница в скоростях обдува наступающей лопасти и отступающей лопасти приводит к разнице в подъёмных силах на этих лопастях. В процессе увеличения скорости полёта пилот вынужден принимать меры к уравниванию подъёмных сил на наступающей лопасти и отступающей, то есть слева по полёту и справа по полёту. Достигается это за счёт автомата перекоса, когда пилот вынужден наклонять несущий винт в сторону отступающей лопасти, увеличивая подъёмную силу на ней и уменьшая подъёмную силу на наступающей лопасти. Сопутствующим явлением этой регулировки за счет наклона несущего винта является появление момента в плоскости, перпендикулярной строительной горизонтали фюзеляжа (СГФ) (или стремящегося опрокинуть вертолёт относительно своей продольной оси или СГФ).
Скорость полета любого вертолёта ограничивается пределами изменения с помощью автомата перекоса величины подъёмной силы на наступающей лопасти и увеличения подъёмной силы на отступающей лопасти, то есть предельным углом наклона тарелки автомата перекоса, и, соответственно, плоскости несущего винта, за пределами которого момент от этих сил уже не компенсируется моментом от боковой составляющей силы веса в центре тяжести (ЦТ) вертолёта и происходит опрокидывание вертолёта.
Технической проблемой заявленного изобретения является создание более эффективного и безопасного вертолета.
Техническим результатом заявленного изобретения является повышение безопасности эксплуатации вертолета, снижение потерь мощности и увеличение скорости и манёвренности вертолета.
Технический результат заявленного изобретения достигается тем, что одновинтовой вертолёт, содержащий фюзеляж, несущий винт, имеющий вал несущего винта и втулку несущего винта, силовую установку с по меньшей мере одним двигателем и главным редуктором, понижающим частоту вращения выходного вала до уровня, необходимого для работы несущего винта, промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, автомат перекоса и приводимые от главного редуктора вспомогательные агрегаты: датчики оборотов, гидронасосы, генераторы, компрессор, и средства охлаждения силовой установки, а также кабину пилотов, содержащую кресла для пилотов, средства управления силовой установкой, несущим винтом, средствами навигации в полёте, средствами отображения параметров полёта и работой силовой установки, и хвостовую балку, согласно изобретения ось выходного вала главного редуктора расположена параллельно строительной горизонтали фюзеляжа и перпендикулярно оси вала несущего винта, при этом вал несущего винта вертолёта, расположенный вертикально в плоскости, перпендикулярной строительной горизонтали фюзеляжа и оси выходного вала главного редуктора, размещен в отдельном корпусе на подшипниках, защищенных от окружающей среды посредством манжетных уплотнений, причем промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, расположен сзади или спереди по полёту от вала несущего винта под углом 45° к осям выходного вала главного редуктора и вала несущего винта, а хвостовая балка вертолёта выполнена с управляемыми посредством тяг и качалок стабилизаторами и рулями, установленными на поворотных осях.
В предлагаемой схеме направление реактивного момента от корпуса главного редуктора направлено против действия момента от подъёмных сил на наступающей и отступающей лопастях в процессе взлёта и полёта вертолёта. При этом при взлёте предлагаемой конструкции вертолёта плоскость несущего винта будет наклонена на угол αв сторону, противоположную действию реактивного момента на корпусе главного редуктора, в отличие от отсутствия этого угла в обычном вертолёте с реактивным моментом, расположенным в плоскости, перпендикулярной оси вала несущего винта. После взлёта в процессе набора скорости пилот вертолёта вследствие роста подъёмной силы на набегающей лопасти и уменьшения подъёмной силы на отступающей лопасти, для избежания опрокидывания вертолёта, постепенно наклоняет несущий винт с помощью автомата перекоса в сторону набегающей лопасти, тем самым уменьшая угол атаки набегающей лопасти и увеличивая угол атаки отступающей лопасти. Момент от равнодействующей подъёмных сил на набегающей и отступающей лопастях образуется за счет наклона несущего винта с помощью автомата перекоса. Момент на несущем винте и реактивный момент на корпусе главного редуктора при взлёте и полёте вертолёта действуют в противоположных направлениях и компенсируют друг друга.
Кроме того, когда предлагаемый вертолёт выровняет положение несущего винта за счет его наклона с помощью автомата перекоса, он уже достигнет определенной скорости, в отличие от нулевой скорости полёта на обычном вертолёте. При достижении максимальной скорости предлагаемый вертолёт и обычный вертолёт будут, при равных условиях располагаемой мощности, конструкции и размеров несущей системы, полётном весе и форме фюзеляжа иметь одинаковый угол наклона плоскости несущего винта, но максимальная скорость предлагаемого вертолёта будет больше благодаря большему располагаемому диапазону угла наклона плоскости несущего винта на величину α.
Заявленное изобретение поясняется чертежами, где:
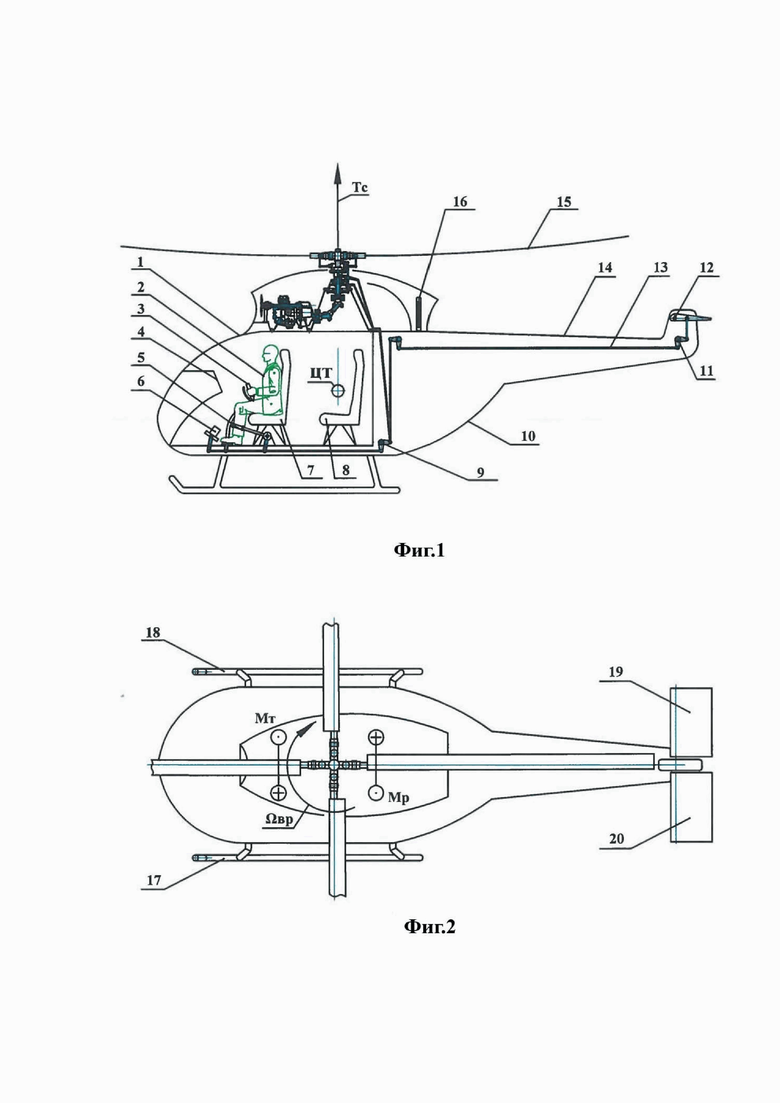
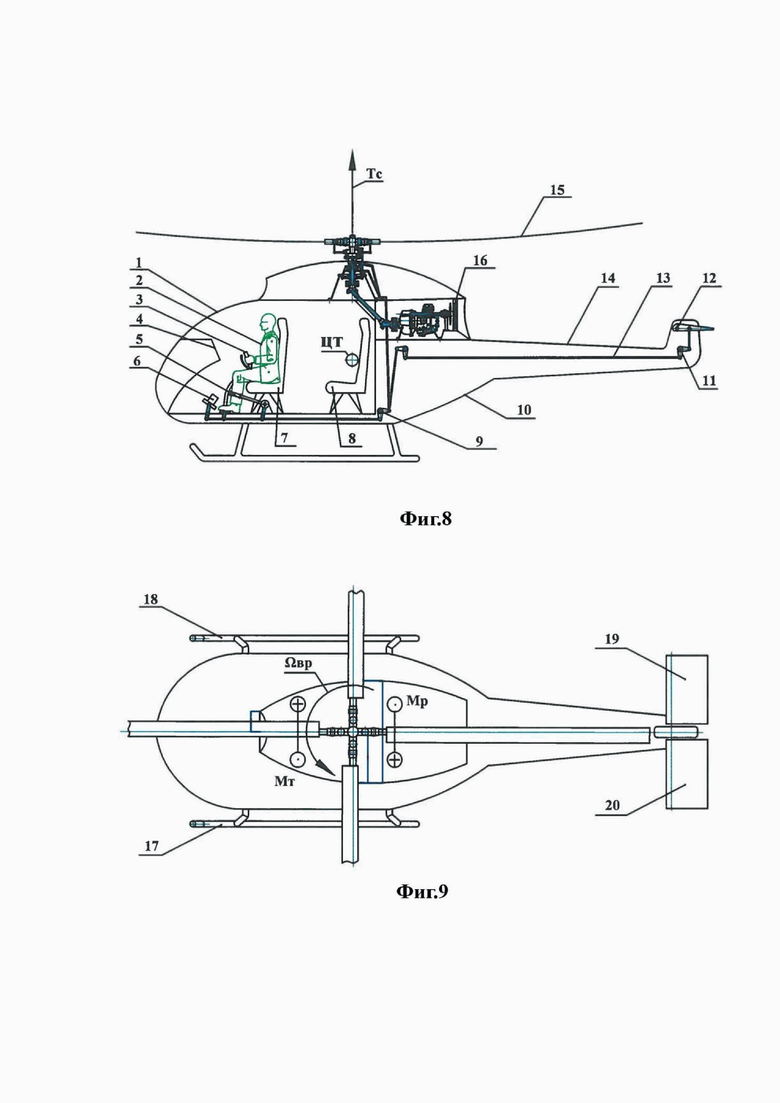
на фиг. 1, 8 - вид сбоку на вертолёт на режиме взлёта,
на фиг. 2, 9 - вид на вертолёт сверху,
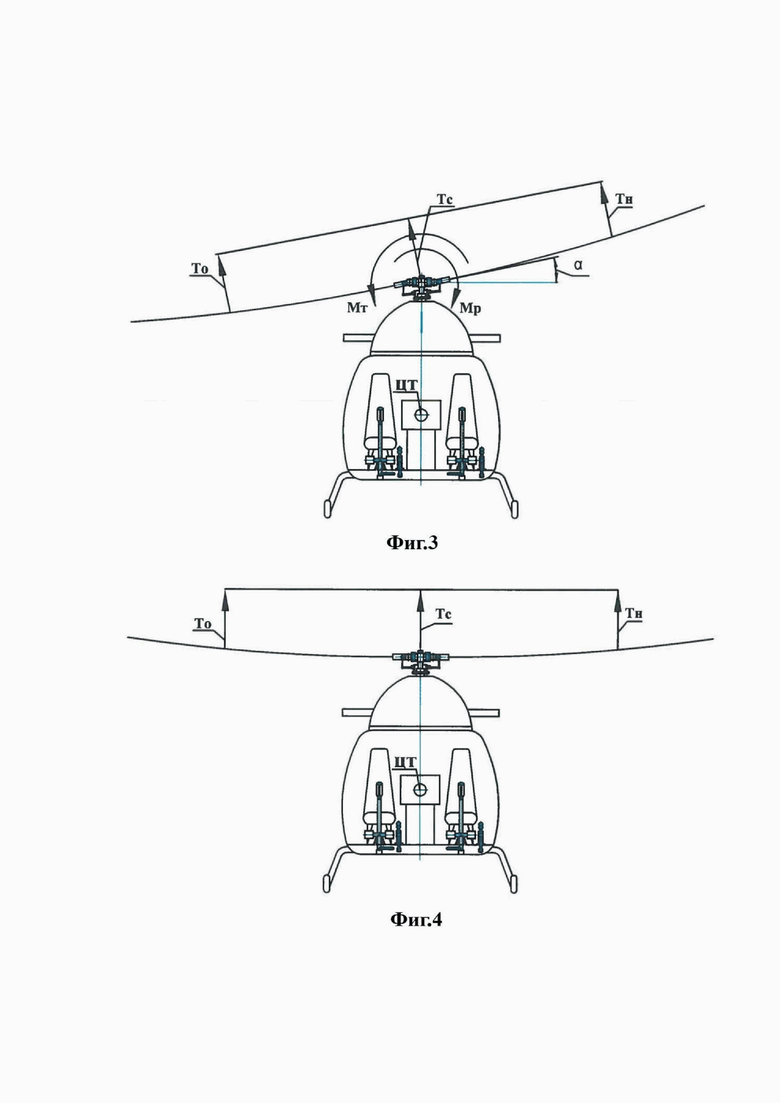
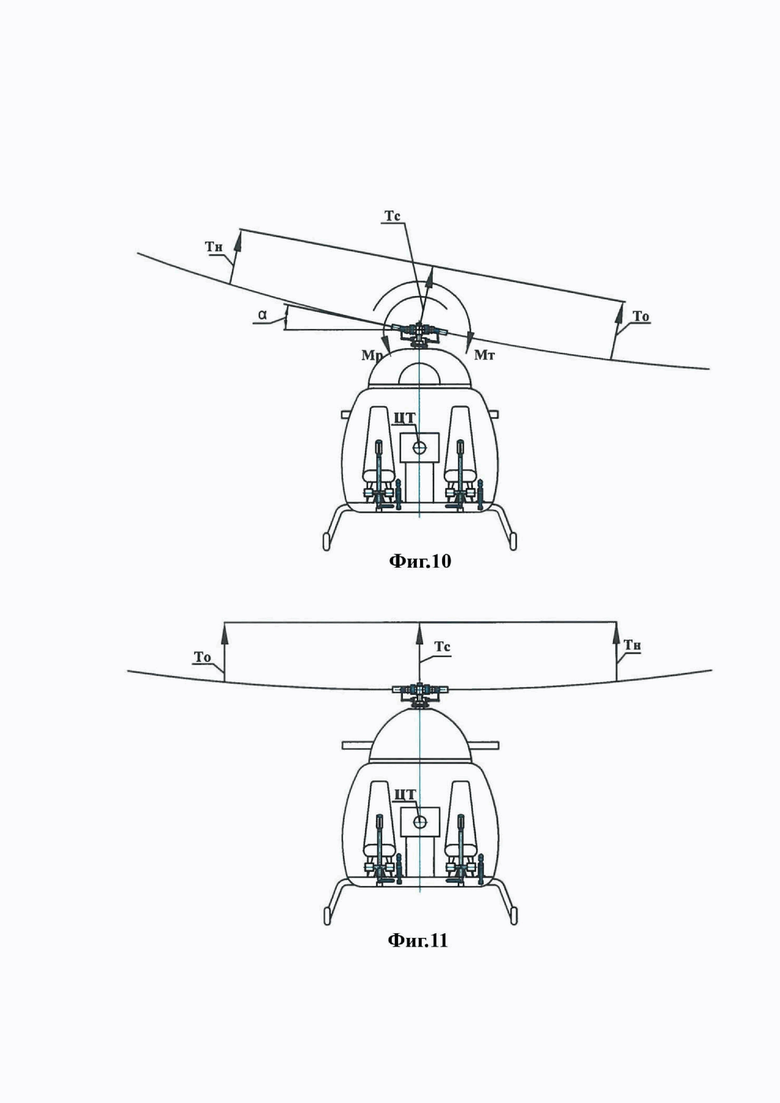
на фиг. 3, 10 - вид на вертолёт спереди на взлётном режиме,
на фиг. 4, 11 - вид на обычный вертолёт спереди на взлётном режиме,
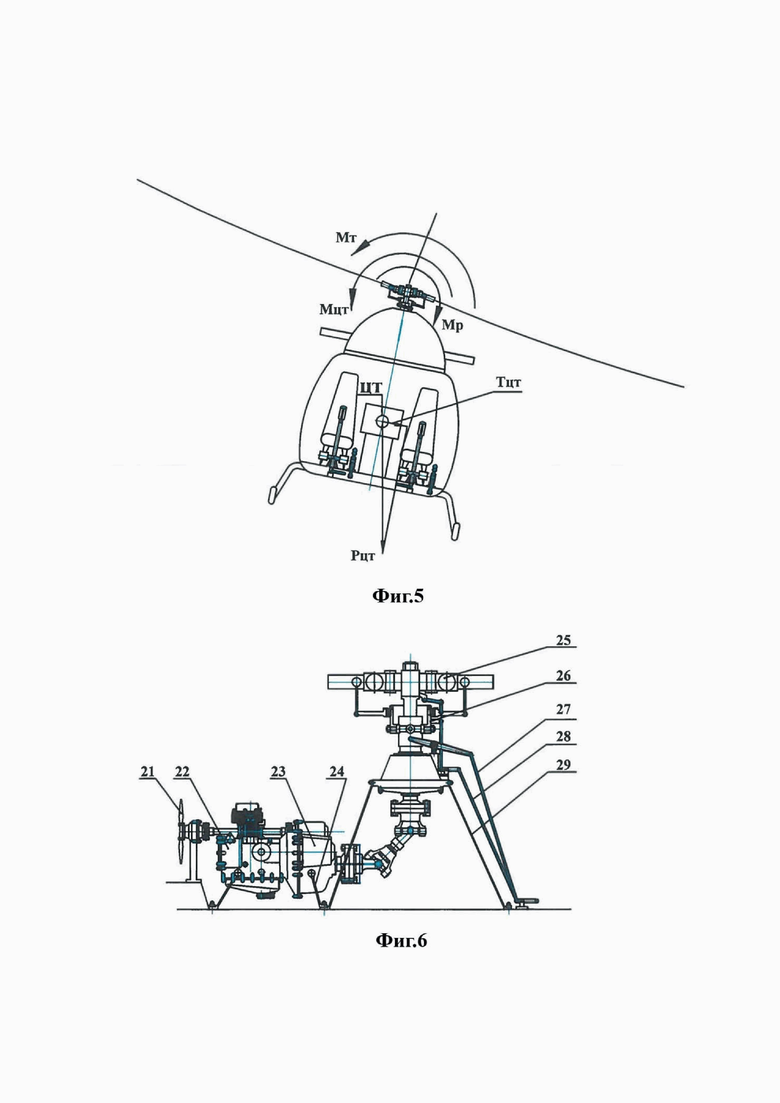
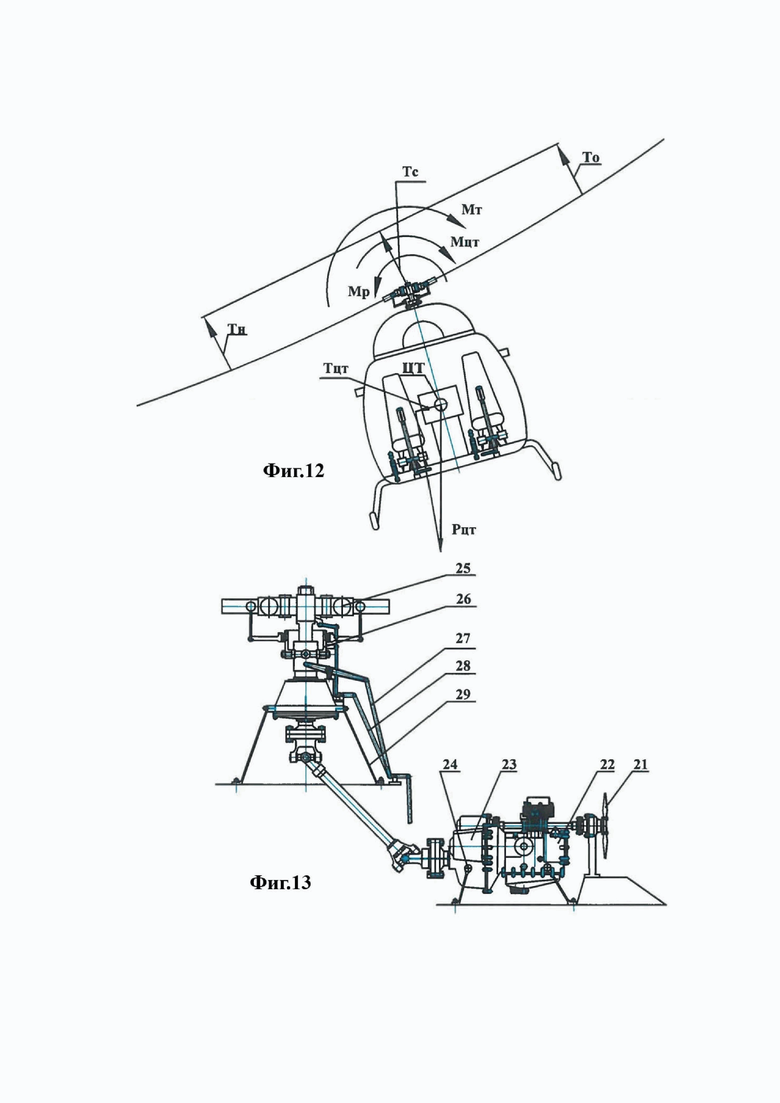
на фиг. 5, 12 - вид на вертолёт в режиме максимальной скорости,
на фиг. 6, 13 - вид на силовую установку вертолёта,
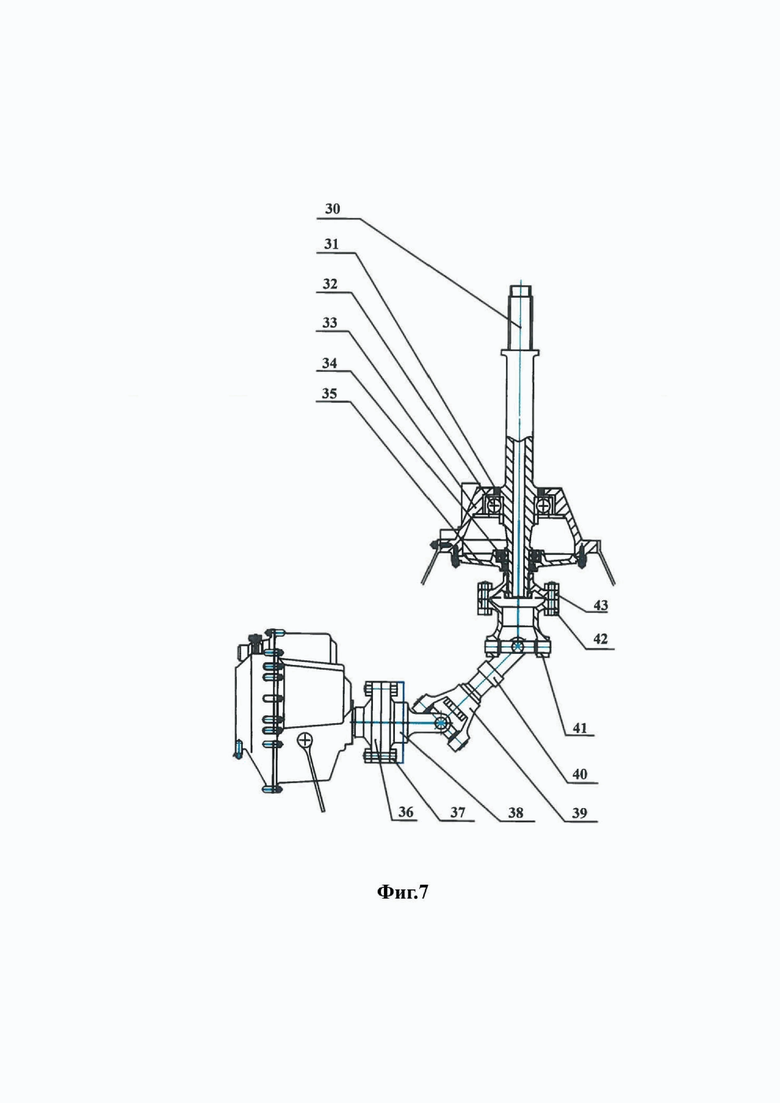
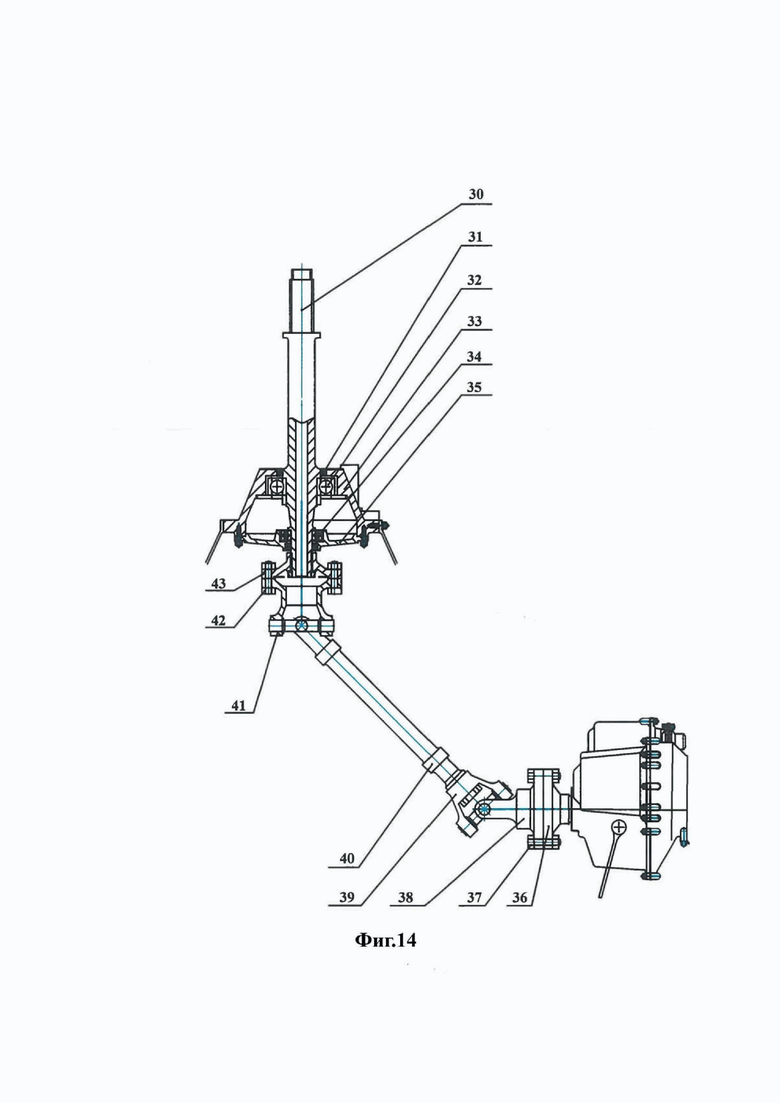
на фиг. 7, 14 - вид на привод вала несущего винта от главного редуктора.
Перечень позиций, приведенных на чертежах:
1 - лобовое остекление;
2 - пилот вертолёта;
3 - ручка управления винтом вертолёта, управляющая наклоном плоскости несущего винта и циклическим шагом лопастей;
4 - приборная панель вертолёта;
5 - ручка шаг-газ, управляющая мощностью двигателей и общим шагом несущего винта;
6 - педали ножного правления стабилизаторами в хвостовом оперении;
7 - кресло пилота;
8 - кресло пассажира;
9 - ось качалок управления общим шагом, циклическим шагом и стабилизаторами в хвостовом оперении;
10 - задние створки вертолёта;
11 - ось качалки управления стабилизаторами;
12 - ось поворота стабилизатора;
13 - тяга управления качалкой управления стабилизатором;
14 - хвостовая балка;
15 - лопасть р несущего винта вертолёта;
16 - радиаторы охлаждения двигателей и главного редуктора;
Tc - подъёмная сила, как средняя подъёмных сил на каждой лопасти;
ЦТ - центр тяжести вертолёта.
На фиг. 2, 9 показаны:
17 - левое полозковое шасси;
18 - правое полозковое шасси;
19 - левый стабилизатор;
20 - правый стабилизатор;
Мт - момент действия от подъёмных сил лопастей несущего винта и его направление;
Mp - реактивный момент, создаваемый главным редуктором и его направление;
Ωвр - направление вращения несущего винта.
На фиг. 3, 10 показаны:
То - результирующая распределенных подъёмных сил отступающей лопасти;
Тн - результирующая распределенных подъёмных сил наступающей лопасти;
Tc - подъёмная сила вертолёта, как средняя подъёмных сил наступающей лопасти и отступающей лопасти;
Мт - момент действия от подъёмных сил лопастей несущего винта и его направление;
Mp - реактивный момент, создаваемый главным редуктором и его направление;
α - угол наклона несущего винта для создания момента, компенсирующего реактивный момент главного редуктора;
ЦТ - центр тяжести вертолёта.
На фиг. 4, 11 показаны:
То - результирующая распределенных подъёмных сил отступающей лопасти;
Тн - результирующая распределенных подъёмных сил наступающей лопасти;
Tc - подъёмная сила вертолёта, как средняя подъёмных сил наступающей лопасти и отступающей лопасти;
ЦТ - центр тяжести вертолёта.
На фиг. 5, 12 показаны:
Мт - момент действия от подъёмных сил лопастей несущего винта и его направление;
Mp - реактивный момент, создаваемый корпусом главного редуктором и его направление;
Мцт - момент действия от боковой составляющей силы тяжести вертолёта и его направление;
ЦТ - центр тяжести вертолёта;
Рцт - сила тяжести вертолёта, приложенная к центру тяжести вертолёта;
Тцт - боковая составляющая от силы тяжести вертолёта, возникающая при крене вертолёта.
На фиг. 6, 13 показаны:
21 - вентилятор охлаждения двигателей и главного редуктора;
22 - двигатели;
23 - главный редуктор;
24 - подкосы крепления главного редуктора и двигателей;
25 - втулка несущего винта;
26 - автомат перекоса;
27 - тяга управления общим шагом лопастей несущего винта;
28 - тяга управления циклическим шагом лопастей несущего винта;
29 - подкосы установки корпуса вала несущего винта вертолёта.
На фиг. 7, 14 показаны:
30 - вал несущего винта;
31 - верхнее уплотнение корпуса несущего винта;
32 - верхний подшипник вала несущего винта;
33 - верхний корпус вала несущего винта;
34 - нижний подшипник вала несущего винта;
35 - нижний корпус вала несущего винта;
36 - фланец выходного вала главного редуктора;
37 - болтовое соединение фланца главного редуктора;
38 - фланец карданного шарнира промежуточного вала;
39 - нижний карданный шарнир промежуточного вала;
40 - промежуточный вал;
41 - верхний карданный шарнир промежуточного вала;
42 - болтовое соединение фланца вала несущего винта;
43 - фланец вала несущего винта.
В предлагающихся фигурах 1-14 представлены две схемы вертолётов. Отличие схем состоит в расположении двигателей, главного редуктора и соединительного вала главного редуктора относительно вала несущего винта, направлении вращения лопастей несущего винта, а также начальном направлении наклона оси несущего винта для компенсации реактивного момента от корпуса главного редуктора.
На фиг. 1-7 двигатели, главный редуктор и соединительный вал расположены спереди по полёту от вала несущего винта, направление вращения выходного вала главного редуктора при виде спереди на главный редуктор - против часовой стрелки, а реактивный момент по часовой стрелке. При виде на несущий винт сверху - направление вращения несущего винта - по часовой стрелке, наступающая лопасть слева по полёту, а отступающая лопасть справа по полёту. При взлёте этого вертолёта несущий винт для компенсации реактивного момента на корпусе главного редуктора наклоняется при виде на вертолёт спереди влево, в сторону отступающей лопасти.
На фиг. 8-14 двигатели, главный редуктор и соединительный вал расположены сзади по полёту от вала несущего винта, направление вращения выходного вала главного редуктора при виде сзади, со стороны двигателей, на главный редуктор - по часовой стрелке, а реактивный момент против часовой стрелки. При виде на несущий винт сверху - направление вращения несущего винта - против часовой стрелки, наступающая лопасть справа по полёту, а отступающая лопасть слева по полёту. При взлёте этого вертолёта несущий винт для компенсации реактивного момента на корпусе главного редуктора наклоняется при виде на вертолёт спереди вправо, в сторону отступающей лопасти на выходном валу главного редуктора.
На фиг. 1, 8 представлен вид сбоку одновинтового скоростного вертолёта, который содержит фюзеляж, несущий винт, имеющий вал (30) несущего винта и втулку (25) несущего винта, как показано на фиг. 6, 13, силовую установку с по меньшей мере одним двигателем (22) и главным редуктором (23), понижающим частоту вращения выходного вала до уровня, необходимого для работы несущего винта, промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, автомат перекоса (26) и приводимые от главного редуктора (23) вспомогательные агрегаты: датчики оборотов, гидронасосы, генераторы, компрессор, и средства охлаждения силовой установки (16, 21), а также кабину пилотов, содержащую кресла для пилотов (7), средства управления силовой установкой, несущим винтом, средствами навигации в полёте, средствами отображения параметров полёта и работой силовой установки.
Ось выходного вала главного редуктора (23) расположена параллельно продольной оси вертолёта и строительной горизонтали фюзеляжа, а также расположена перпендикулярно оси вала несущего винта (30).
Вал несущего винта (30) вертолёта, расположенный вертикально в плоскости, перпендикулярной строительной горизонтали фюзеляжа и оси выходного вала главного редуктора (23), размещен в отдельном корпусе (33, 35) на отдельных подшипниках (32, 34), защищенных от окружающей среды посредством манжетных уплотнений (31).
Промежуточный вал (40), соединяющий выходной вал главного редуктора (23) и вал несущего винта (30), расположен сзади или спереди по полёту от вала несущего винта (30) под углом 45° к осям выходного вала главного редуктора (23) и вала несущего винта (30).
Хвостовая балка (14) вертолёта выполнена с управляемыми посредством тяг (13) и качалок стабилизаторами (19, 20), показанными на фиг. 2, 9, и рулями, установленными на поворотных осях.
Особенностью предлагаемой одновинтовой схемы вертолета является ориентация выходного вала главного редуктора (23) параллельно горизонтальной оси вертолёта и строительной горизонтали фюзеляжа (СГФ). При этом вал несущего винта (30) расположен вертикально в плоскости, перпендикулярной оси выходного вала главного редуктора (23). Вал несущего винта (30) расположен в отдельном корпусе (33, 35) на собственных подшипниках (верхний - 32, нижний - 34) и соединяется с выходным валом главного редуктора (23) посредством промежуточного вала (40). Промежуточный вал (40) расположен под углом 45 градусов к СГФ и к валу несущего винта (30) и соединяется с валом несущего винта (30) посредством шарнира, например, карданного и фланцевого болтового соединения, показанного на фиг.7 и 14. Со своей противоположной стороны промежуточный вал (40) соединяется с выходным валом главного редуктора (23) посредством шарнира, например, карданного и фланцевого болтового соединения, показанного на фиг.7, 14.
При этом, плоскость действия реактивного момента (МР), образующегося на корпусе главного редуктора (23) при передаче через него мощности на несущий винт, расположена перпендикулярно СГФ и представлена на фиг. 5, 12,а в плоскости, перпендикулярной оси вала несущего винта (30), реактивный момент (МР) отсутствует. Отсутствие реактивного момента (МР) непосредственно от несущего винта при его вращении с подведенной к нему мощностью доказывает существование таких вертолётов, как вертолёты с приводом несущего винта от расположенных на концах лопастей двигателей.
Создаваемый в плоскости, перпендикулярной СГФ и стремящийся опрокинуть вертолёт относительно центра втулки несущего винта, реактивный момент (МР)от корпуса главного редуктора, компенсируется за счет трёх факторов:
- момента (МТ) от равнодействующих подъёмных сил на набегающей и отступающей лопастях (15) несущего винта. Величину равнодействующих сил на наступающей и отступающей лопастях на вертолёте регулируют с помощью автомата перекоса (26), который наклоняя несущий винт в ту или иную сторону, регулирует величины угла атаки лопастей (15), тем самым уменьшая или увеличивая равнодействующие подъёмных сил на лопастях. Представленная на фиг. 3, 10 подъёмная сила (ТС) вертолёта является результатом (ТО, ТН) действия равнодействующих сил на всех лопастях (15) и приложена к центру втулки (25) несущего винта. Благодаря этой силе вертолёт держится в воздухе. Регулируя с помощью автомата перекоса (26) величину равнодействующих сил на лопастях (15) слева и справа от вертолёта в плоскости, перпендикулярной СГФ, (на набегающей лопасти и на отступающей лопасти) создаётся момент от этих сил, противоположный по направлению действия реактивному моменту (МР) на корпусе главного редуктора. Таким образом, происходит компенсация реактивного момента откорпуса главного редуктора (23);
- боковой составляющей (ТЦТ) от силы веса вертолёта (РЦТ), приложенной к центру тяжести (ЦТ) вертолёта и создающей момент (МЦТ), направленный против опрокидывания вертолёта в сторону, противоположную наклону вертолёта (фиг. 5, 12);
- возможности использования поперечного относительно СГФ момента от управляемых, например, от педалей пилотов, стабилизаторов (19, 20) хвостового оперения вертолёта.
В представленной схеме вертолёта создаётся возможность дополнительного увеличения скорости полёта по отношению к вертолёту с обычными способами компенсации реактивного момента. Также за счет отсутствия рулевого винта и привода рулевого винта не требуется дополнительное время экипажу вертолета на отключение двигателей и перевод режима работы несущего винта вертолета в режим авторотации (режим самовращения несущего винта), что приводит к снижению потерь мощности и повышению безопасности эксплуатации вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОВИНТОВОЙ ВЕРТОЛЕТ | 2015 |
|
RU2588277C1 |
| Вертолёт двухроторный с аэродинамическими компенсаторами реактивного момента роторов | 2022 |
|
RU2784735C1 |
| Вертолёт двухроторный с управляемым вектором тяги двигателя | 2023 |
|
RU2793976C1 |
| ВЕРТОЛЁТ | 2018 |
|
RU2742513C2 |
| Вертолет с реактивным приводом несущего винта | 2018 |
|
RU2706746C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
Изобретение относится к области авиации, в частности к конструкциям вертолетов. Одновинтовой вертолёт содержит фюзеляж, несущий винт, вал несущего винта, силовую установку с двигателем и главным редуктором, промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, автомат перекоса и приводимые от главного редуктора вспомогательные агрегаты. Ось выходного вала главного редуктора расположена параллельно строительной горизонтали фюзеляжа и перпендикулярно оси вала несущего винта. Вал несущего винта вертолёта, расположенный вертикально, размещен в отдельном корпусе на подшипниках, защищенных от окружающей среды посредством манжетных уплотнений. Промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, расположен сзади или спереди по полёту от вала несущего винта под углом 45° к осям выходного вала главного редуктора и вала несущего винта. Хвостовая балка вертолёта выполнена с управляемыми стабилизаторами и рулями. Обеспечивается повышение безопасности эксплуатации вертолета, снижение потерь мощности и увеличение скорости и манёвренности вертолета. 14 ил.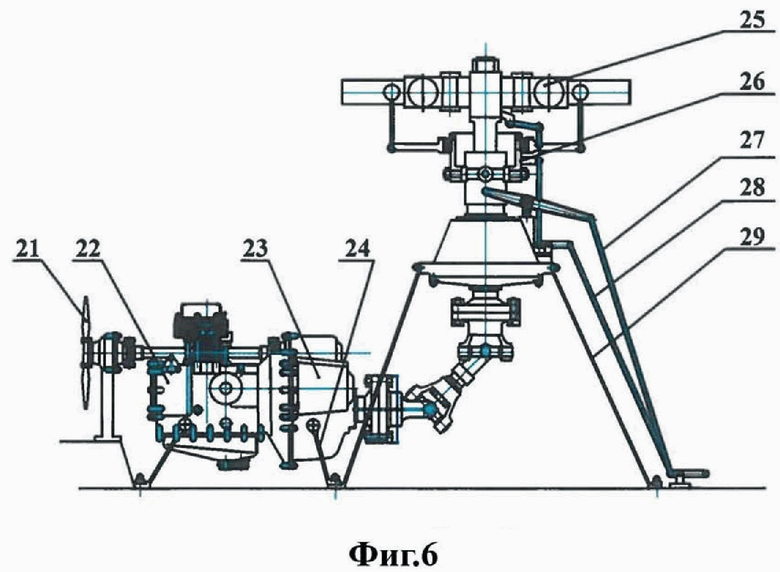
Одновинтовой вертолёт, содержащий фюзеляж, несущий винт, имеющий вал несущего винта и втулку несущего винта, силовую установку с по меньшей мере одним двигателем и главным редуктором, понижающим частоту вращения выходного вала до уровня, необходимого для работы несущего винта, промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, автомат перекоса и приводимые от главного редуктора вспомогательные агрегаты: датчики оборотов, гидронасосы, генераторы, компрессор, и средства охлаждения силовой установки, а также кабину пилотов, содержащую кресла для пилотов, средства управления силовой установкой, несущим винтом, средствами навигации в полёте, средствами отображения параметров полёта и работой силовой установки, и хвостовую балку, отличающийся тем, что ось выходного вала главного редуктора расположена параллельно строительной горизонтали фюзеляжа и перпендикулярно оси вала несущего винта, при этом вал несущего винта вертолёта, расположенный вертикально в плоскости, перпендикулярной строительной горизонтали фюзеляжа и оси выходного вала главного редуктора, размещен в отдельном корпусе на подшипниках, защищенных от окружающей среды посредством манжетных уплотнений, причем промежуточный вал, соединяющий выходной вал главного редуктора и вал несущего винта, расположен сзади или спереди по полёту от вала несущего винта под углом 45° к осям выходного вала главного редуктора и вала несущего винта, а хвостовая балка вертолёта выполнена с управляемыми посредством тяг и качалок стабилизаторами и рулями, установленными на поворотных осях.
| ОДНОВИНТОВОЙ ВЕРТОЛЕТ | 2015 |
|
RU2588277C1 |
| КАСКАДНО-СТАБИЛИЗАТОРНЫЙ ВЕРТОЛЁТ | 2000 |
|
RU2266237C2 |
| Способ производства кормовых антибиотиков и устройство для осуществления этого способа | 1959 |
|
SU127364A1 |
| CN 105882956 A, 24.08.2016 | |||
| ПРОСТОЙ СПОСОБ ПОЛУЧЕНИЯ АВИБАКТАМА | 2018 |
|
RU2711358C1 |

