Изобретение относится к области авиации, а именно к вертолетам, выполненным по одновинтовой схеме со средствами компенсации реактивного момента несущего винта, выполняющими роль рулевого винта, и может быть использовано для создания вертолетов одновинтовой схемы без рулевого винта, а также систем путевого управления вертолетом.
Известен вертолет Ми-34 («Московский вертолетный завод имени М.Л. Миля», М.: Любимая книга, 1998, с. 241-248), где агрегаты силовой установки находятся в задней части фюзеляжа, а главный редуктор - над потолком в центральной части фюзеляжа. Недостатком данного вертолета является отсутствие свободного пространства в задней части фюзеляжа.
Известен одновинтовой вертолет без рулевого винта (RU 2266237 «Каскадно-стабилизаторный вертолет», МПК В64С 27/06, В64С 27/82, публ. 2005 г.), который является прототипом предлагаемого изобретения. Управление вертолетом осуществляется при помощи системы стабилизаторов, установленных на поперечной балке, которая расположена на конце хвостовой балки в зоне вращения несущего винта. При этом стабилизаторы имеют возможность поворачиваться вокруг своей вертикальной оси, а хвостовая балка, выполненная с поперечным сечением в виде крыла, имеет возможность менять свое положение относительно своей продольной оси.
Такое выполнение средств компенсации реактивного момента несущего винта не представляется эффективным в виду того, что через стабилизаторы, а также по боковой поверхности хвостовой балки, проходит только часть воздушного потока от несущего винта, и, соответственно, компенсации будет подлежать только часть реактивного крутящего момента.
Целью заявляемого технического решения является обеспечение выполнения вертолетом с механическим приводом единственного несущего винта транспортных функций при перемещениях в воздушном пространстве без затрат мощности основных двигателей на компенсацию реактивного момента, создаваемого на фюзеляже, за счет разработки эффективной системы компенсации реактивного момента несущего винта вертолета, не связанного с аэродинамикой хвостовой части вертолета и, благодаря этому, дополнительно позволяющего более полно использовать объем кабины вертолета и ее доступность со стороны задних грузовых створок.
Поставленная цель достигается благодаря тому, что в одновинтовом вертолете, содержащем фюзеляж, силовую установку с двигателями и главным редуктором, несущий винт, установленный на валу главного редуктора, и средства компенсации реактивного момента несущего винта, в соответствии с заявляемым изобретением - агрегаты силовой установки размещены на поворотной платформе, которая установлена на потолочной панели фюзеляжа с возможностью поворота относительно своей вертикальной оси и снабжена приводом, при этом ось вращения поворотной платформы смещена относительно центра масс вертолета, а вал несущего винта расположен наклонно относительно вертикали, причем длина и угол наклона относительно вертикали вала несущего винта и смещение оси вращения поворотной платформы относительно центра масс выбраны из условия обеспечения компенсации реактивного момента несущего винта на фюзеляже, при повороте платформы на необходимый угол, в зависимости от режима полета, за счет смещения центра втулки несущего винта относительно центра масс вертолета и соответствующего изменения плеча действия силы тяжести относительно оси вала несущего винта.
Привод поворотной платформы содержит электродвигатель и самотормозящийся редуктор, взаимодействующий через зубчатое зацепление с поворотной платформой.
Подшипниковый узел поворота поворотной платформы содержит осевой и упорный подшипники, причем упорный подшипник содержит верхнее кольцо, установленное на поворотной платформе, а нижнее кольцо его установлено в потолочной панели.
При расположении наклонного вала несущего винта главного редуктора в продольной плоскости вертолета центр несущего винта расположен над центром масс (далее - ЦМ) вертолета. Для создания момента, используемого для компенсации реактивного момента несущего винта, поворотную платформу поворачивают относительно оси ее вращения на угол, соответствующий режиму полета. При этом положение центра несущего винта относительно ЦМ вертолета изменяется, и, в соответствии с полученным плечом действия силы тяжести, возникает момент, компенсирующий реактивный момент несущего винта на фюзеляже вертолета.
Размещение агрегатов силовой установки вне пространства грузовой кабины, а также отсутствие хвостовой балки, позволяет полностью использовать объем грузовой кабины вертолета и снабдить кабину большими и удобными для погрузки задними грузовыми створками, что позволяет расширить применение вертолета.
Заявляемое техническое решение одновинтового вертолета поясняется чертежами, где изображены:
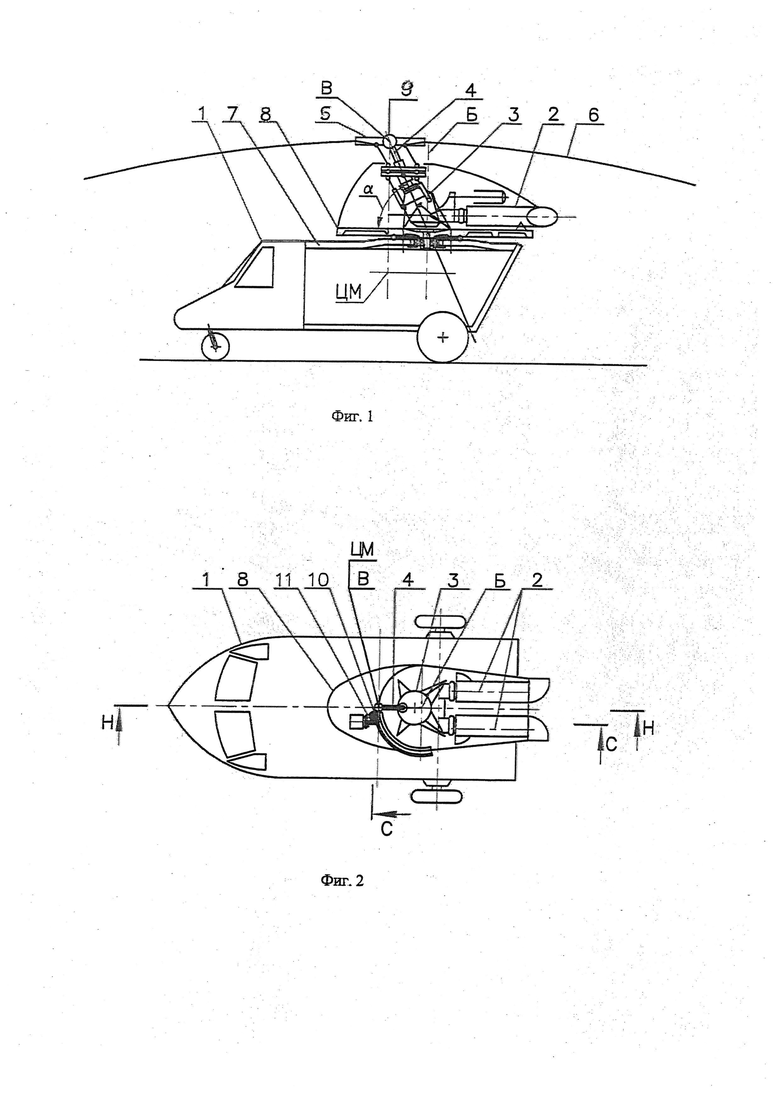
на фиг. 1 - вид сбоку вертолета, находящегося на стоянке;
на фиг. 2 - вид вертолета сверху;
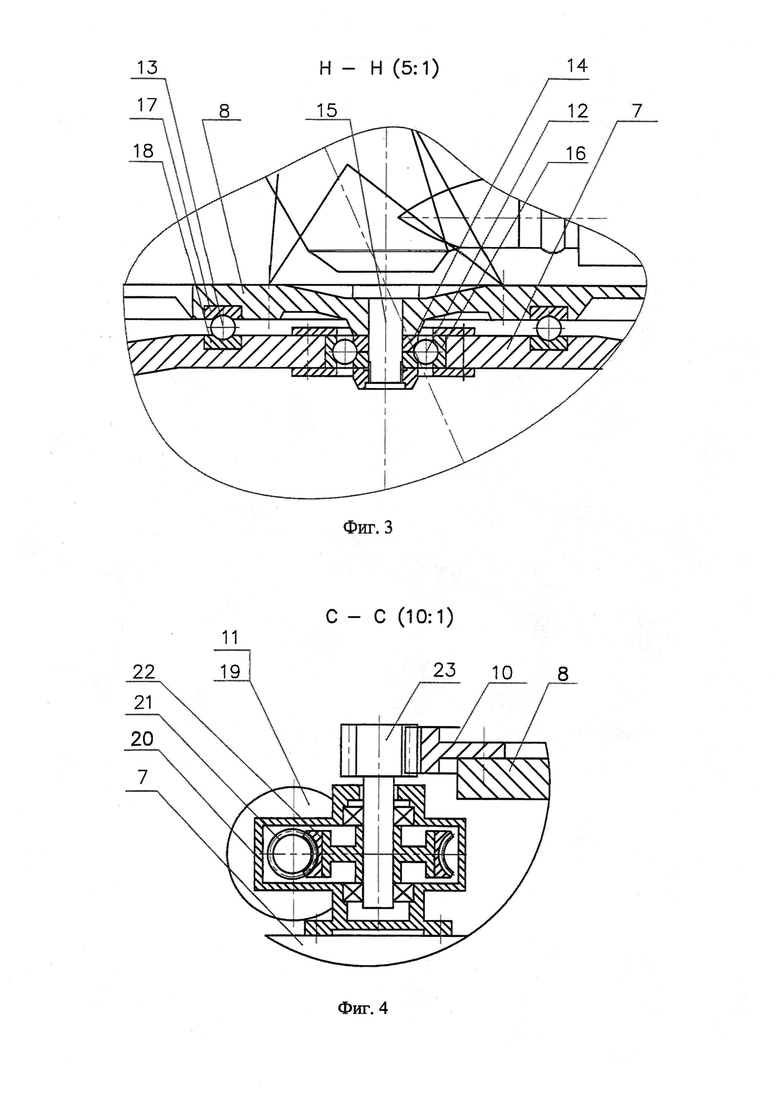
на фиг. 3 - подшипниковый узел поворотной платформы (сечение Н-Н);
на фиг. 4 - привод поворотной платформы (сечение С-С);
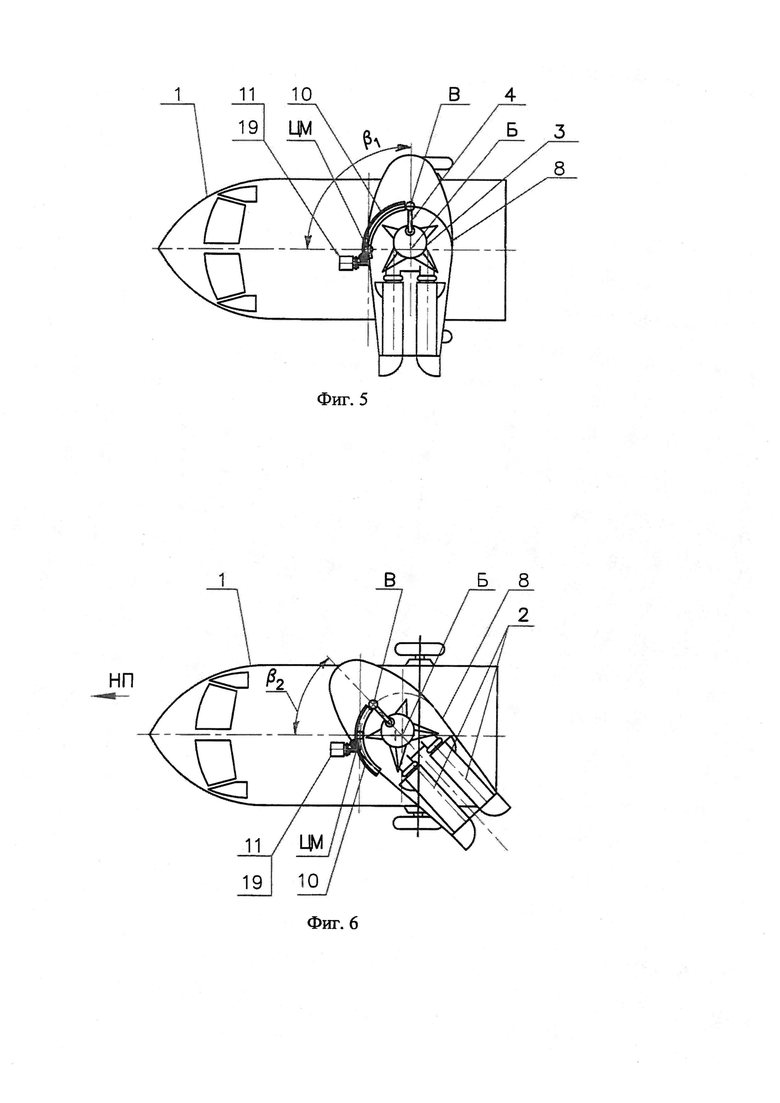
на фиг. 5 - вид вертолета сверху в режиме взлета и в режиме максимальной мощности;
на фиг. 6 - вид вертолета сверху в режиме крейсерской мощности.
Одновинтовой вертолет содержит фюзеляж 1 (фиг. 1), силовую установку с двигателями 2 и главным редуктором 3. На выходном валу 4 главного редуктора 3 установлен несущий винт 5 с лопастями 6.
С целью регулирования величины парирующего момента потолочная панель 7 фюзеляжа 1 вертолета снабжена поворотной платформой 8, где размещены агрегаты силовой установки.
Вертикальная ось вращения (Б) (фиг. 1 и 2) поворотной платформы 8 смещена относительно ЦМ вертолета. Несущий винт 5 установлен на валу 4 главного редуктора 3 через шарнирную втулку 9. Вал 4 несущего винта 5 главного редуктора 3 расположен наклонно, под углом α, относительно вертикали, причем при положении вала 4 в продольной плоскости вертолета центр втулки (В) находится над ЦМ (фиг. 2). Длина и угол наклона α относительно вертикали вала 4 несущего винта 5 главного редуктора 3, а также смещение оси вращения (Б) поворотной платформы 8 относительно ЦМ выбраны из условия обеспечения компенсации реактивного момента несущего винта 5 при повороте поворотной платформы 8 в заданном диапазоне углов поворота.
Поворотная платформа 8 через зубчатое зацепление 10 соединена с редуктором привода 11 поворотной платформы 8 (фиг. 2).
Подшипниковый узел поворотной платформы 8, изображенный на фиг. 3, содержит осевой 12 и упорный 13 подшипники. Внутреннее кольцо 14 осевого подшипника 12 установлено с натягом на неподвижный относительно поворотной платформы 8 опорный вал 15 и закреплено на нем. Наружное кольцо 16 осевого подшипника 12 закреплено на потолочной панели 7 фюзеляжа 1. Упорный подшипник 13 может быть выполнен в виде, например, шарикового подшипника, при этом его верхнее кольцо 17 закреплено в поворотной платформе 8, а нижнее 18 - на потолочной панели 7 фюзеляжа 1. Осевой подшипник 12 воспринимает вес вертолета, а упорный подшипник 13 - силы от изгибающего момента, возникающего на поворотной платформе 8 при крене и тангаже вертолета в полете.
На фиг. 4 изображен привод 11 поворотной платформы 8, который содержит электродвигатель 19 и самотормозящийся редуктор 20, например червячно-цилиндрический. Он включает в себя червячное колесо 21 и червячную шестерню 22. Ведущая шестерня 23 привода 11 взаимодействует с зубчатым венцом зубчатого зацепления 10 поворотной платформы 8. Электродвигатель 19 питается от генераторов на главном редукторе 3.
Заявляемый одновинтовой вертолет работает следующим образом.
При нахождении вертолета на стоянке (фиг. 1) продольная ось поворотной платформы 8 расположена вдоль продольной оси фюзеляжа.
В режиме взлета (фиг. 5) пилот устанавливает необходимый режим работы двигателей 2. Поворотная платформа 8 с помощью привода 11 с самотормозящимся редуктором 20 разворачивается на максимально-необходимый угол β1 относительно продольной оси фюзеляжа 1. Угол β1 поворота поворотной платформы 8 устанавливается тем больше, чем больше загрузка вертолета, больше требуемая мощность двигателей и чем больше, соответственно, крутящий момент на оси вала 4 несущего винта 5 главного редуктора 3 и чем больше реактивный момент на фюзеляже 1. Вал электродвигателя 19 может вращаться как по часовой стрелке, так и против, обеспечивая установку необходимого угла β1 поворота поворотной платформы 8. Самотормозящийся редуктор 20 обеспечивает фиксацию поворотной платформы 8 в необходимом положении угла поворота.
При максимальной загрузке вертолета полезным грузом и максимальной заправке топливом двигатели 2 работают на максимальном режиме, на валу 4 несущего винта 5 главного редуктора 3 достигается максимальный крутящий момент. При этом на фюзеляж 1 действует максимальный реактивный момент, формируется максимальная величина плеча действия силы тяжести вертолета относительно оси вала 4 несущего винта 5 главного редуктора 3 и достигается максимальный компенсирующий момент на фюзеляже 1 вертолета.
При нахождении вертолета в режиме крейсерской мощности (фиг. 6) с помощью привода 11 поворотной платформы 8 уменьшают угол (β2) разворота поворотной платформы 8 относительно продольной оси фюзеляжа 1. В этом режиме появляется набегающий поток воздуха и увеличивается подъемная сила, благодаря чему потребная мощность двигателей 2 уменьшается. При этом на оси вала 4 несущего винта 5 от главного редуктора 3 крутящий момент уменьшается до достижения определенного значения скорости, а затем увеличивается, так как увеличивается воздушное сопротивление. В режиме крейсерской мощности на фюзеляже 1 также изменяется (уменьшается) реактивный и компенсирующий моменты, а также изменяется (уменьшается) величина плеча действия силы тяжести вертолета относительно оси вала 4 несущего винта 5 главного редуктора 3.
При нахождении вертолета в режиме авторотации уменьшают угол (β2) разворота поворотной платформы 8 относительно оси (Б) фюзеляжа 1 до минимальной величины. В этом режиме двигатели 2 не работают, крутящий момент на оси вала 4 несущего винта 5 главного редуктора 3 отсутствует, реактивный момент на фюзеляже 1 отсутствует. Необходимость компенсации реактивного момента отсутствует. Необходимость формирования плеча действия силы тяжести вертолета относительно оси вала 4 несущего винта 5 главного редуктора 3 отсутствует.
В режиме авторотации за счет работающего электродвигателя 19 через самотормозящийся редуктор 20 управляют угловым положением платформы 8, уменьшая угол ее поворота (β2) до минимальной величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одновинтовой скоростной вертолёт | 2022 |
|
RU2770945C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
Изобретение относится к области авиации и может быть использовано для создания вертолетов одновинтовой схемы без рулевого винта. Одновинтовой вертолет содержит фюзеляж, несущий винт, силовую установку с двигателями и главным редуктором. Вал несущего винта расположен наклонно относительно вертикали. Агрегаты силовой установки размещены на поворотной платформе. Поворотная платформа установлена на потолочной панели фюзеляжа с возможностью поворота относительно своей вертикальной оси и снабжена приводом, который содержит электродвигатель и самотормозящийся редуктор. При этом ось вращения поворотной платформы смещена относительно центра масс вертолета. Длина и угол наклона относительно вертикали вала несущего винта и смещение оси вращения поворотной платформы относительно центра масс выбраны из условия обеспечения компенсации реактивного момента несущего винта на фюзеляже. Угол поворота поворотной платформы зависит от режима полета. Достигается снижение затрат мощности основных двигателей на компенсацию реактивного момента несущего винта. 2 з.п. ф-лы, 6 ил.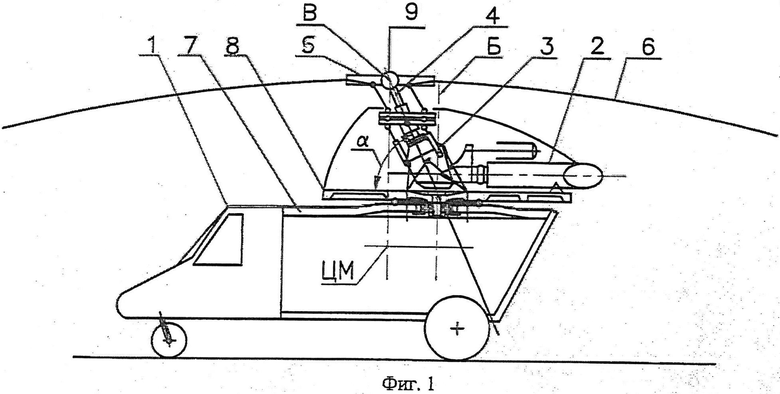
1. Одновинтовой вертолет, содержащий фюзеляж, силовую установку с двигателями и главным редуктором, несущий винт, установленный на валу главного редуктора, и средства компенсации реактивного момента несущего винта, отличающийся тем, что агрегаты силовой установки размещены на поворотной платформе, которая установлена на потолочной панели фюзеляжа с возможностью поворота относительно своей вертикальной оси и снабжена приводом, при этом ось вращения поворотной платформы смещена относительно центра масс вертолета, а вал несущего винта расположен наклонно относительно вертикали, причем длина и угол наклона относительно вертикали вала несущего винта и смещение оси вращения поворотной платформы относительно центра масс выбраны из условия обеспечения компенсации реактивного момента несущего винта на фюзеляже, при повороте платформы на необходимый угол, в зависимости от режима полета, за счет смещения центра втулки несущего винта относительно центра масс вертолета и соответствующего изменения плеча действия силы тяжести относительно оси вала несущего винта.
2. Одновинтовой вертолет по п. 1, отличающийся тем, что привод поворотной платформы содержит электродвигатель и самотормозящийся редуктор, взаимодействующий через зубчатое зацепление с поворотной платформой.
3. Одновинтовой вертолет по п. 1, отличающийся тем, что подшипниковый узел поворота поворотной платформы содержит осевой и упорный подшипники, причем упорный подшипник содержит верхнее кольцо, установленное на поворотной платформе, а нижнее кольцо его установлено в потолочной панели.
| US 4720059 A, 19.01.1988 | |||
| JP H05270494 A, 19.10.1993 | |||
| ВЕРТОЛЕТ С КЛИНОВИДНЫМ ФЮЗЕЛЯЖЕМ | 2009 |
|
RU2392187C1 |
| US 2011024551 A1, 03.02.2011. | |||

