Изобретение относится к области лазерной локации и квантовой электронике и может быть использовано в различных локационных и наблюдательных системах для обнаружения оптических и оптикоэлектронных приборов и средств наблюдения, расположенных и замаскированных на местности, а также для обнаружения различных специальных объектов, средств вооружения, транспортных средств, находящихся на контролируемой территории.
Известна лазерная система обнаружения оптикоэлектронных (ОЭ) объектов [1], содержащая лазерный генератор, объектив, фотоприемный блок, сканер лазерного излучения, блок управления и обработки информации, пороговое устройство интенсивности, интерференционный фильтр. К недостаткам данной системы следует отнести низкую эффективность обнаружения приборов оптического и оптикоэлектронного типа, что обусловлено низкой информативностью данной системы, в которой обнаружение объектов осуществляется на одной длине волны, генерируемой лазерным генератором, посредством пороговой обработки единичного отраженного сигнала, содержащего информацию только о фронтальной величине отражательной характеристики обнаруживаемого объекта в узком угловом поле наблюдения.
Известно оптикоэлектронное устройство по патенту Франции [2], содержащее передающий канал с источником подсвета и оптической системой, приемный канал, содержащий приемный объектив, фотоприемный блок, светоделитель, сопрягающий приемный и передающий каналы. К недостаткам данного устройства следует отнести низкую эффективность обнаружения приборов оптикоэлектронного типа, обусловленную тем, что обнаружение осуществляется по одному единственному признаку - величине фронтально отраженного оптического сигнала на одной длине волны, генерируемой подсвечивающим лазерным генератором. При этом обнаружение оптикоэлектронного прибора возможно только при наличии бликовой ситуации, при которой в отраженном излучении имеется ярко выраженный блик (импульс), характеризующий наличие в ОЭ приборе элементов с хорошо отражающими свойствами. При использовании в современных ОЭ приборах антиотражающих противобликовых покрытий наблюдение таких приборов характеризуется отсутствием бликовой ситуации, что резко снижает эффективность обнаружения ОЭ приборов с помощью данного устройства. Известна лазерная система обнаружения оптикоэлектронных объектов по патенту Англии [3], содержащая частотно-импульсный лазер с объективом и фотоприемное устройство с объективом, блок памяти, блок отображения информации. К недостаткам данной системы следует отнести низкую эффективность обнаружения ОЭ приборов вследствие малой информативности системы, в которой обнаружение ОЭ прибора осуществляется на основе пороговой обработки фронтально отраженного оптического сигнала в узком угловом поле наблюдения отраженного лазерного излучения и на одной длине волны подсвечивающего лазерного излучения.
В качестве прототипа выбрано устройство обнаружения оптикоэлектронных объектов [4], содержащее две лазерные локационные системы, расположенные в одной плоскости на поверхности Земли на базовом расстоянии В одна от другой. Лазерные системы содержат лазерный генератор с блоком управления, сканер лазерного излучения с блоком управления, фотоприемный блок, объектив, блок управления, приемник глобальной навигационной системы, блок определения текущих координат, счетчик импульсов излучения, блок отображения информации. К недостаткам данного устройства следует отнести низкую эффективность обнаружения ОЭ объектов, обусловленную малой информативностью устройства, в котором в обеих лазерных системах обнаружение осуществляется по единственному признаку превышения принимаемого оптического сигнала порогового уровня. При этом используется только величина фронтально отраженного оптического (лазерного) излучения от обнаруживаемого (наблюдаемого) ОЭ объекта, что не является надежным и эффективным признаком для обнаружения современных ОЭ приборов, снабженных антибликовыми покрытиями. Кроме этого в данном устройстве отсутствуют средства, обеспечивающие наведение зондирующих лазерных излучений от каждой из лазерных систем в единую заданную точку контролируемого объема пространства и контроль за точностью этого наведения - совмещения лазерного излучения в единой точке КОП. Это дополнительно снижает эффективность обнаружения и распознавания наблюдаемых объектов. Вследствие низкой эффективности обнаружения объектов отсутствует возможность распознавания типа ОЭ объектов, что является одним из главных требований к современным системам наблюдения и обнаружения ОЭ приборов.
В предлагаемом комплексе лазерной локации решена задача повышения эффективности обнаружения различных классов современных оптикоэлектронных приборов и объектов, в том числе приборов, снабженных антибликовыми покрытиями, а также задача повышения вероятности распознавания наблюдаемых объектов. Указанные проблемы решены на основе повышения информативности используемых технических средств лазерной локации. Это достигается в результате наиболее полного извлечения информации из лазерного излучения, отраженного от контролируемой области пространства и регистрируемого в фотоприемных блоках лазерных локационных систем, входящих в состав предлагаемого комплекса лазерной локации. Повышение информативности достигается, во-первых, за счет осуществления сканирования КОП лазерным излучением в двух спектральных диапазонах на двух длинах волн в видимом диапазоне и в инфракрасном диапазоне длин волн, во-вторых, за счет регистрации зависимости уровня отраженного оптического сигнала от угла наблюдения, то есть регистрации индикатрисы рассеивания лазерного излучения, отраженного от наблюдаемого обнаруживаемого объекта.
Достигаемым новым техническим результатом является повышение эффективности обнаружения и вероятности распознавания обнаруживаемых объектов - оптических и оптикоэлектронных приборов и средств наблюдения - и повышение точности определения координат обнаруженных объектов и привязки их координат к единой глобальной навигационной системе координат. Указанный технический результат достигается следующим.
1. В комплекс лазерной локации, содержащий две лазерные локационные системы, расположенные в одной плоскости на поверхности Земли на базовом расстоянии В одна от другой, идентичных по своему составу, каждая из лазерных локационных систем содержит расположенные на первой оптической оси первый лазерный генератор с блоком управления, отражательное зеркало, сканер лазерного излучения (ЛИ) с блоком управления, расположенные на третьей оптической оси оптически связанные первый фотоприемный блок, первый объектив, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, блок управления лазерной локационной системой, выход которого подключен к блоку управления сканером ЛИ, приемник сигналов глобальной навигационной спутниковой системы, введены в каждую из лазерных локационных систем первый дефлектор лазерного излучения, установленный на первой оптической оси между первым лазерным генератором и отражательным зеркалом, установленные на второй оптической оси оптически связанные второй лазерный генератор с блоком управления, второй дефлектор лазерного излучения, оптический выход которого посредством отражательного зеркала связан со сканером лазерного излучения, первый блок динамической спектральной фильтрации, установленный на третьей оптической оси между первым объективом и первым фотоприемным блоком, установленные на четвертой оптической оси оптически связанные второй фотоприемный блок, второй блок динамической спектральной фильтрации, второй объектив, оптический вход которого посредством отражательного зеркала связан со сканером ЛИ, блок обработки локационных сигналов, синхрогенератор, генератор кодов, блок связи, первый и второй блоки регистрации сигналов, входы которых подсоединены соответственно к выходам первого и второго фотоприемных блоков, а выходы подключены ко входам блока обработки локационных сигналов, а также введено устройство контроля, расположенное в плоскости двух лазерных локационных систем на поверхности Земли на фиксированном расстоянии от первой и второй лазерных локационных систем, содержащее эталонные отражатели ЛИ, блок перемещения эталонных отражателей и электрически связанные третий приемник сигналов глобальной навигационной спутниковой системы и третий блок связи, при этом входы блоков управления первым и вторым лазерными генераторами подключены к генератору кодов, выходы которого подключены к блоку обработки локационных сигналов и блоку связи, а второй вход подключен к выходу синхрогенератора, выходы которого подсоединены также к блоку обработки локационных сигналов, блоку управления лазерной локационной системой и к блоку связи, приемник сигналов глобальной навигационной спутниковой системы подключен к блоку обработки локационных сигналов, к блоку связи и к блоку управления лазерной локационной системой, первый и второй фотоприемные блоки подключены к блоку управления лазерной локационной системой.
2. В комплексе по пункту 1 в лазерных локационных системах первый и второй фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
3. В комплексе по пункту 1 в лазерных локационных системах первый и второй динамические спектральные фильтры выполнены на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
4. В комплексе по пункту 1 в лазерных локационных системах динамические спектральные фильтры выполнены на основе активного квантового фильтра с перестройкой полосы пропускания и длины волны фильтрации магнитным полем.
5. В комплексе по пункту 1 в лазерных локационных системах в качестве лазерных генераторов использованы лазерные генераторы с перестройкой длин волн генерации в видимом и инфракрасном диапазонах длин волн.
6. Комплекс по пункту 1 содержит три и более лазерные локационные системы, идентичные по составу, расположенные на одной прямой линии на фиксированных расстояниях одна от другой, работающие синхронно и обменивающиеся информацией посредством блоков связи, входящих в каждую из лазерных локационных систем.
Сущность изобретения поясняется блок-схемами, приведенными на фиг.1-4.
На фиг.1 приведена блок-схема комплекса лазерной локации, на которой обозначены следующие элементы:
1. Первая лазерная локационная система.
2. Вторая лазерная локационная система.
3. Блок связи первой лазерной локационной системы.
4. Блок связи второй лазерной локационной системы.
5. Устройство контроля.
6. Эталонные отражатели, входящие в состав устройства контроля 5.
7. Контролируемая область пространства (КОП).
8. Оптико-электронное устройство, расположенное в КОП.
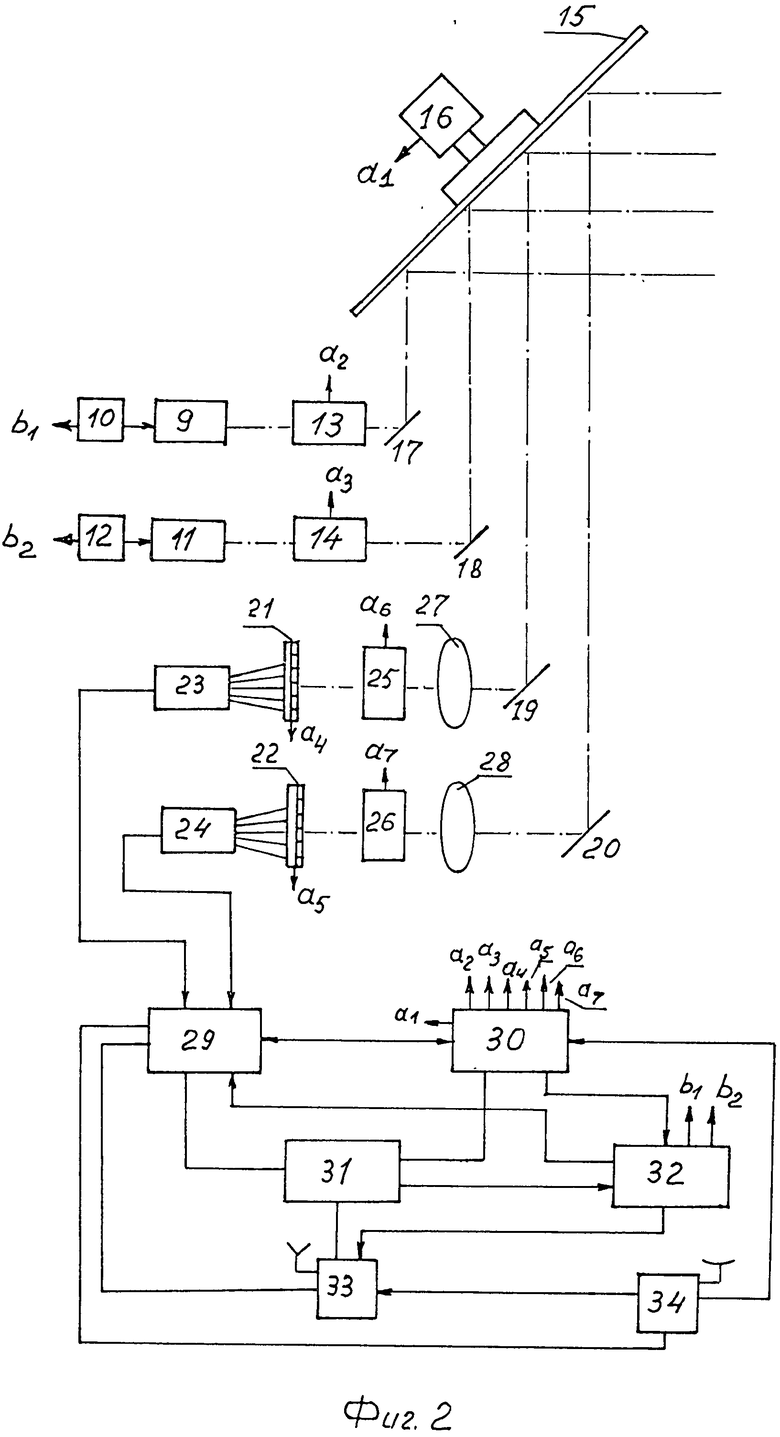
На фиг.2 приведена блок-схема лазерной локационной системы, где обозначены следующие элементы:
9. Первый лазерный генератор с блоком управления 10.
11. Второй лазерный генератор с блоком управления 12.
13. Первый дефлектор лазерного излучения.
14. Второй дефлектор лазерного излучения.
15. Сканер лазерного излучения (ЛИ) с блоком управления 16.
17, 18, 19, 20. Отражательные зеркала.
21. Первый фотоприемный блок.
22. Второй фотоприемный блок.
23. 24. Первый и второй блоки регистрации сигналов.
25. Первый блок динамической спектральной фильтрации.
26. Второй блок динамической спектральной фильтрации.
27, 28. Первый и второй объективы.
29. Блок обработки локационных сигналов.
30. Блок управления лазерной локационной системой.
31. Синхрогенератор.
32. Генератор кодов.
33. Блок связи, представленный также на фиг.1 и обозначенный поз.3.
34. Приемник сигналов глобальной навигационной спутниковой системы.
Первая и вторая лазерные локационные системы, представленные на фиг.1 и обозначенные позициями 1 и 2, идентичны по своему составу и соответствуют блок-схеме, приведенной на фиг.2.
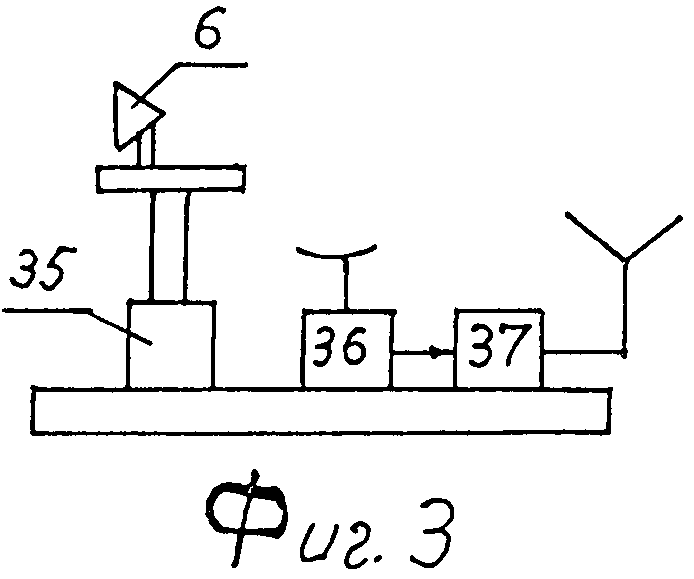
На фиг.3 представлено устройство контроля, где приведен вид по стрелке А на фиг.1, поз.5. Устройство контроля содержит следующие элементы:
6. Эталонные отражатели лазерного излучения.
35. Блок перемещения эталонных отражателей.
36. Третий приемник сигналов глобальной навигационной спутниковой системы.
37. Третий блок связи.
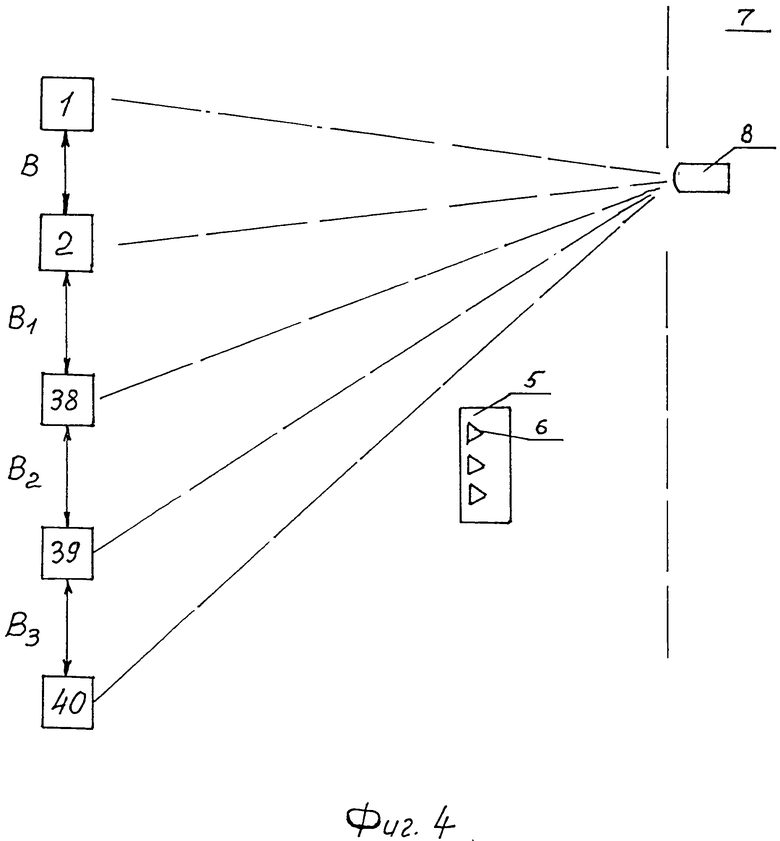
На фиг.4 представлена блок-схема комплекса лазерной локации, содержащего пять лазерных локационных систем, где обозначены следующие элементы:
1, 2. Первая и вторая лазерные локационные системы.
38, 39, 40. Третья, четвертая и пятая лазерные локационные системы.
5. Устройство контроля.
6. Эталонные отражатели.
7. Контролируемый объем пространства.
8. Оптико-электронный прибор.
Первый и второй блоки связи входят в состав первой и второй лазерных локационных систем и представлены на фиг.1, поз.3 и 4 и поз.33 на фиг.2. Третий блок связи поз.37 на фиг.3 входит в состав устройства контроля поз.5 на фиг.1 и фиг.3.
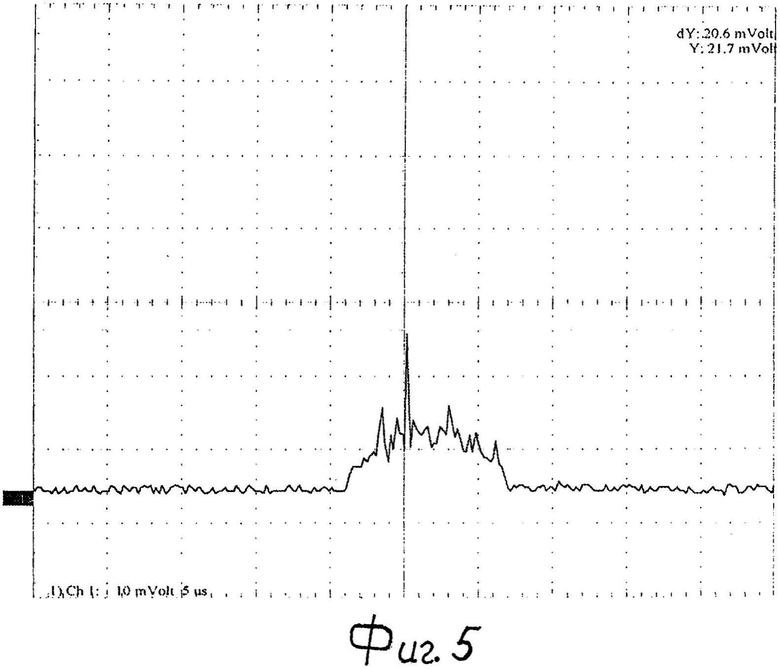
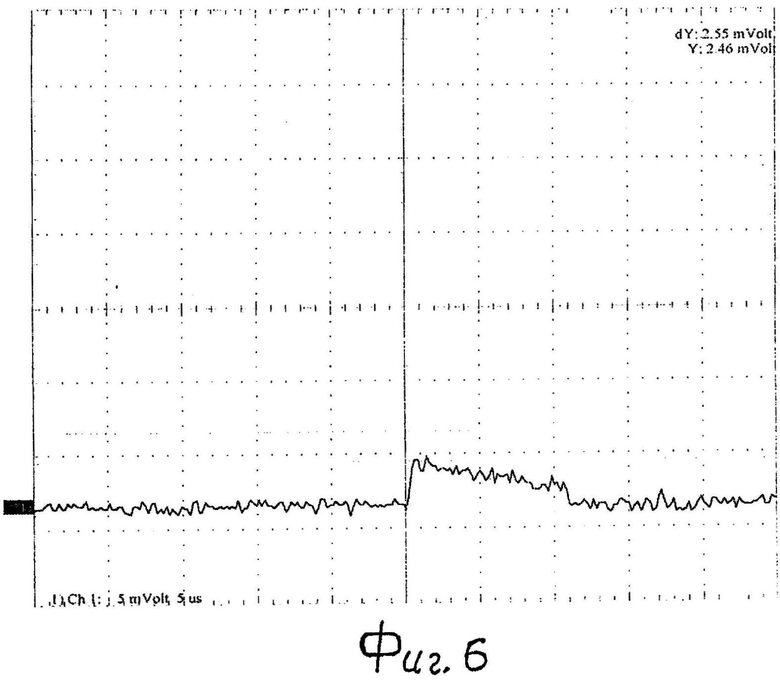
На фиг.5 и 6 представлены осциллограммы экспериментальных исследований предлагаемого комплекса лазерной локации.
Принцип действия комплекса лазерной локации заключается в следующем.
Комплекс лазерной локации, состоящий из двух идентичных лазерных локационных систем (ЛЛС) (фиг.1), располагается на поверхности Земли на некотором расстоянии от контролируемой области пространства (КОП) 7 и действует в пределах прямой видимости. В некоторой точке (области) КОП на поверхности Земли расположен оптикоэлектронный или оптический прибор наблюдения 8 или некоторый иной объект, который необходимо обнаружить посредством предлагаемого комплекса лазерной локации.
Лазерные локационные системы поз.1 и 2 на фиг.1 осуществляют сканирование контролируемой области пространства (КОП) лазерным излучением в двух диапазонах длин волн - видимом и инфракрасном диапазонах. Сканирование КОП осуществляется указанными лазерными локационными системами синхронно и одновременно. При этом в каждый момент времени лазерные локационные системы 1 и 2 облучают одну и ту же точку (область) в КОП, что обеспечивается тем, что при сканировании КОП сканеры лазерного излучения (ЛИ) 15 в каждой лазерной локационной системах 1 и 2 направлены на одну и ту же точку (область) в КОП и обеспечивают, таким образом, облучение лазерным излучением одной и той же области в КОП. Соответственно лазерные локационные системы 1 и 2 осуществляют прием и регистрацию ЛИ, отраженного от одной и той же точки (области) в КОП, на которую были направлены сканеры 15 ЛИ (в обеих лазерных локационных системах). При этом фотоприемные блоки 21 и 22 в обеих лазерных локационных системах (ЛЛС) 1 и 2 работают синхронно и одновременно осуществляют прием лазерного излучения, отраженного от КОП. Лазерные генераторы 9, 11 в обеих ЛЛС 1 и 2 работают последовательно и попеременно (по очереди). В результате этого на первом этапе анализа (обнаружения) объекта в заданной точке КОП работают лазерные генераторы 9, 11 в первой ЛЛС, которая осуществляет подсвет (облучение) выбранной точки в КОП, на которую направлен сканер ЛИ 15. Прием ЛИ, отраженного от КОП, в результате подсвета первой ЛЛС осуществляют фотоприемные блоки 21, 22 в обеих ЛЛС одновременно. При этом в первой ЛЛС 1 фотоприемные блоки 21, 22 осуществляют прием фронтально отраженного лазерного излучения, а фотоприемные блоки 21, 22 во второй ЛЛС 2 осуществляют прием лазерного излучения, отраженного от выбранной точки КОП под некоторым углом. На втором этапе анализа и обнаружения объекта в заданной точке КОП работают лазерные генераторы 9, 11 во второй ЛЛС, которая в свою очередь осуществляет подсвет выбранной точки в КОП, на которую направлен сканер ЛИ 15. Прием ЛИ, отраженного от КОП в результате подсвета второй ЛЛС 2, осуществляют фотоприемные блоки 21, 22 в обеих ЛЛС одновременно. При этом в первой ЛЛС 1 фотоприемные блоки 21, 22 в свою очередь осуществляют прием ЛИ, отраженного от выбранной точки в КОП, под некоторым углом по отношению к облучающему эту точку лазерному излучению от второй ЛЛС 2. Фотоприемные блоки 21, 22 во второй ЛЛС 2 также в свою очередь осуществляют прием фронтально отраженного лазерного излучения. Таким образом, в результате одного цикла анализа (исследования) отражательных характеристик заданной точки (области) в КОП, в которую были направлены визирные оси одновременно сканеров ЛИ 15 в обеих ЛЛС 1 и 2, фотоприемные блоки 21, 22 в двух ЛЛС принимают и регистрируют отраженные сигналы лазерного излучения четырех различных типов. К ним относятся два сигнала лазерного излучения, отраженные фронтально от выбранной точки (области) в КОП по отношению к облучающим эту точку лазерным излучениям от первой и второй ЛЛС. При этом лазерные излучения от первой и второй ЛЛС облучают выбранную точку в КОП под некоторым углом вследствие того, что первая и вторая ЛЛС расположены на некотором базовом расстоянии В одна от другой, то есть имеет место параллакс взаимного положения первой и второй ЛЛС. Помимо двух фронтально отраженных сигналов ЛИ фотоприемные блоки 21, 22 в первой и второй ЛЛС регистрируют два сигнала лазерных излучений, отраженных от выбранной точки КОП под некоторыми углами по отношению к направлению распространения лазерного излучения, подсвечивающего в соответствующий момент времени выбранную точку КОП от первой или второй ЛЛС. Отметим, что указанные четыре типа отраженных сигналов ЛИ регистрируются в двух диапазонах длин волн в соответствии с тем, что облучение КОП осуществляется в двух диапазонах длин волн. Таким образом, всего регистрируется восемь различных типов (видов) сигналов лазерного излучения при одном цикле анализа (исследования) отражательных характеристик в одной выбранной (заданной) точке (области) КОП. Полученная информация с выходов фотоприемных блоков 21, 22 в обеих ЛЛС поступает в реальном времени в первый и второй блоки регистрации сигналов 23, 24, где подвергается оцифровке, запоминается и далее через специальные интерфейсы, входящие в блок 29, поступает в блок обработки локационных сигналов 29 для последующей специальной обработки. Одновременно в блоке обработки локационных сигналов 29 определяется величина дальности до отражающей точки (области) в КОП по величине задержки по времени импульса принятого лазерного излучения по отношению к моменту времени излучения зондирующего импульса ЛИ на основании стандартного алгоритма определения дальности до отражающего излучение объекта. На этом цикл анализа (исследования) отражательных характеристик в выбранной (заданной) точке КОП завершается, и сканер лазерного излучения 15 в обеих ЛЛС 1 и 2 перемещает визирную линию направления лазерного излучения в соседнюю точку КОП или в какую-либо другую выбранную точку КОП. После установления визирной линии направления ЛИ в каждой из ЛЛС на новую точку (область) наблюдения в КОП осуществляется цикл облучения этой точки в КОП лазерным излучением от двух ЛЛС комплекса и прием ЛИ, отраженного от данной точки КОП с помощью фотоприемных блоков в ЛЛС. Данный новый (очередной) цикл аналогичен рассмотренному предыдущему рабочему циклу. При этом, как и в предшествующем цикле, осуществляется поочередный подсвет выбранной точки КОП лазерным излучением сначала первой ЛЛС, затем лазерным излучением второй ЛЛС. Прием лазерного излучения, отраженного от выбранной точки КОП, осуществляется параллельно и одновременно первой и второй лазерными локационными системами 1,2 с помощью фотоприемных блоков 21 и 22, входящих в состав этих ЛЛС. Полученная информация, зарегистрированная фотоприемными блоками 21, 22 и блоками регистрации сигналов 23, 24, поступает в блок обработки локационных сигналов 29. Указанным способом осуществляется анализ (исследование) отраженного лазерного излучения для каждой точки (области) в КОП путем сканирования КОП лазерным излучением от двух ЛЛС и регистрации и анализа отраженного лазерного излучения параллельно и одновременно в обеих ЛЛС, разнесенных на некоторое фиксированное базовое расстояние В. В результате в блоке обработки локационных сигналов 29 в оперативной памяти блока накапливается информация об отражательных характеристиках каждой независимо облученной точки (области) в КОП. В блоке обработки локационных сигналов 29 информация, полученная от каждой точки в КОП, обрабатывается по отдельности. При этом информация, накопленная в блоке обработки локационных сигналов 29 во второй ЛЛС 2 на фиг.1, передается по каналу связи через блоки связи 33 во второй ЛЛС и первой ЛЛС в блок обработки локационных сигналов 29 в первой ЛЛС. В первой ЛЛС в блоке 29 осуществляется окончательная обработка информации, полученной при облучении каждой точки (области) в КОП лазерным излучением от двух ЛЛС. Обработка информации в блоке 29 в первой ЛЛС может осуществляться как сразу после получения отраженных сигналов ЛИ от какой либо точки в КОП, так и после осуществления сканирования всего КОП лазерным излучением от двух ЛЛС. В данном режиме работы первая ЛЛС является ведущей (основной) при осуществлении сканирования КОП лазерным излучением от двух ЛЛС и обработки информации, полученной при регистрации отраженного лазерного излучения. В результате для каждой точки в КОП в блоке обработки локационных сигналов 29 в первой ЛЛС образуются реализации отраженных сигналов четырех различных типов для двух длин волн лазерного излучения, которыми был осуществлен подсвет соответствующей точки в КОП. Из указанных четырех типов отраженных сигналов два типа сигналов получены в результате регистрации фронтально отраженного лазерного излучения, но с двух различных точек подсвета, обусловленных тем, что первая и вторая ЛЛС разнесены на базовое расстояние В. Два других типа сигналов получены в результате регистрации отраженного лазерного излучения под некоторым углом, обусловленным тем, что излучатель лазерного излучения в первой ЛЛС и фотоприемный блок во второй ЛЛС разнесены на базовое расстояние В. Аналогично излучатель ЛИ во второй ЛЛС и фотоприемный блок в первой ЛЛС разнесены на расстояние В. В результате осуществляется регистрация дискретных элементов индикатрисы рассеивания отраженного излучения для данной выбранной точки (области) в КОП в зависимости от угла подсвета лазерным излучением или в зависимости от угла наблюдения для двух длин волн ЛИ. Дискретные элементы индикатрисы регистрируются в результате того, что прием отраженного ЛИ осуществляется в фотоприемных блоках 21, 22 на основе матричных многоэлементных сенсоров - приемников импульсного лазерного излучения. Попеременное облучение точки в КОП с двух разнесенных точек подсвета позволяет получить дополнительный объем информации об отражательных характеристиках выбранной точки (области) в КОП, в том числе в отношении динамики изменения отражательных характеристик во времени при наблюдении и подсвете под различными пространственными углами. Следует отметить, что дополнительный объем информации из отраженного лазерного излучения извлекается вследствие регистрации в фотоприемных блоках 21, 22 тонкой временной структуры сигналов отраженного ЛИ. Базовый пространственный угол, под которым регистрируется отраженный сигнал ЛИ, определяется отношением базового расстояния В к дальности до выбранной точки (области) в КОП. При базовом расстоянии между первой и второй ЛЛС В, равном 200 метрам, и наибольшей дальности прямой видимости, равной 5000 метрам, базовый пространственный угол равен 0,04 радиан, или 2,29 градуса. При таком угле видения величина индикатрисы отраженного лазерного излучения для оптических и оптикоэлектронных приборов и средств наблюдения и разведки существенно изменяется, по сравнению с уровнем при фронтальном отражении лазерного излучения, что позволяет с высокой степенью эффективности осуществить обнаружение оптикоэлектронного прибора и обеспечивает высокую вероятность его правильного распознавания и отнесения к соответствующему классу оптикоэлектронных приборов. При меньшей дальности до наблюдаемой точки в КОП величина базового пространственного угла увеличивается, что позволяет зафиксировать еще большую величину изменения индикатрисы отраженного ЛИ и обеспечивает высокую эффективность обнаружения и распознавания оптикоэлектронных приборов и других объектов, расположенных в КОП. В блоке обработки локационных сигналов 29 в первой ЛЛС по измеренной дальности до отражающей точки в КОП осуществляют определение базового пространственного угла, по величине которого осуществляют определение стандартных величин изменения (уменьшения) величин индикатрисы отраженного ЛИ для ряда стандартных оптикоэлектронных приборов, информация о которых (для двух диапазонов длин волн) хранится в специальных регистрах памяти блока 29. Далее в блоке 29 осуществляется сравнение полученных величин изменения индикатрисы отраженного лазерного излучения для выбранной точки (области) в КОП с указанной информацией для известных и стандартных оптикоэлектронных приборов и других объектов из регистров (устройств) памяти блока 29. На основании этого сравнения в блоке обработки локационных сигналов 29 в первой ЛЛС, являющейся ведущей ЛЛС, выносится суждение об обнаружении оптикоэлектронного прибора, находящегося в выбранной точке в КОП, и о принадлежности этого оптикоэлектронного прибора к некоторому конкретному классу приборов. На этом обработка информации, полученной от выбранной точки (области) в КОП, в блоке 29 завершена, и блок 29 автоматически переходит к обработке информации - локационных сигналов, полученных от следующей точки в КОП. Аналогичным образом осуществляется обработка информации, полученной при сканировании и облучении лазерным излучением в двух диапазонах длин волн всего контролируемого объема пространства (КОП). Для дальнейшего повышения эффективности работы комплекса лазерной локации предусмотрено использование в ЛЛС комплекса лазерных генераторов с перестройкой длины волны генерируемого лазерного излучения. Такие лазерные генераторы отдельно для видимого и инфракрасного диапазонов длин волн освоены современной промышленностью. Указанная перестройка длин волн генерации ЛИ одновременно с перестройкой длин волн узкополосной фильтрации в динамических спектральных фильтрах позволяет получить дополнительно большой объем информации об отражательных характеристиках наблюдаемых объектов на различных длинах волн дискретно в пределах видимого и инфракрасного диапазонов и при фронтальном отражении и под некоторыми углами одновременно. Это дополнительно повышает эффективность обнаружения и распознавания широкого класса оптикоэлектронных объектов. Далее полученная информация отображается на дисплее, входящем в состав блока управления ЛЛС 30, передается потребителю, а функционирование комплекса лазерной локации завершается.
В состав обеих лазерных локационных систем предлагаемого комплекса входят ряд элементов, обеспечивающих рассмотренное выше функционирование комплекса. Далее рассмотрим работу этих элементов комплекса.
В предлагаемом комплексе лазерной локации последовательное изменение направления в пространстве визирных осей ЛЛС и собственно сканирование лазерного излучения по пространству в пределах КОП осуществляется с помощью сканера лазерного излучения 15 (фиг.2), который показан условно в виде однозеркальной отражательной системы с блоком управления 16. В настоящее время промышленностью освоены различные варианты построения механических двухзеркальных систем, обеспечивающих двумерное сканирование лазерного излучения в горизонтальной и вертикальной плоскостях, которые могут быть использованы в предлагаемом комплексе лазерной локации [9]. В предлагаемом комплексе лазерной локации в обеих ЛЛС для сканирования ЛИ дополнительно использованы дефлекторы лазерного излучения 13, 14, выполненные на основе быстродействующих акустооптических дефлекторов - сканаторов лазерного излучения, освоенных промышленностью, обеспечивающих быструю и высокоточную подстройку направления распространения лазерного излучения, генерируемого соответствующим лазерным генератором 9, 11. Применение данных дефлекторов ЛИ, управляемых от блока управления ЛЛС 30, обеспечивает высокую точность наведения лазерного излучения в заданную точку (область) КОП и одновременно высокую точность совмещения наводимого лазерного излучения от двух разных ЛЛС 1 и 2 в одну и ту же точку КОП, что в конечном счете обеспечивает высокую достоверность получения отражательных характеристик от одной и той же точки КОП и высокую эффективность обнаружения и распознавания объектов. Описание принципов работы акустооптических дефлекторов и их характеристики приведены в монографии [5] на стр.134-167. Следует отметить, что сканер ЛИ 15 и дефлекторы ЛИ 13, 14 снабжены датчиками состояния, передающими информацию о режиме работы сканера ЛИ и дефлекторов ЛИ в блок управления ЛЛС 30. По этой информации определяется направление в пространстве визирных осей лазерных локационных систем и координаты обнаруженного объекта.
Важную функцию в комплексе лазерной локации выполняет устройство контроля 5 на фиг.1, блок-схема которого приведена на фиг.3. Устройство контроля обеспечивает настройку наведения визирных осей первой и второй ЛЛС в одну выбранную точку КОП при осуществлении сканирования КОП одновременно лазерным излучением от обеих ЛЛС, а также устройство контроля 5 обеспечивает возможность контроля качества сведения указанных визирных осей в процессе работы комплекса, то есть обеспечивает режим функционального контроля. Для осуществления настройки наведения (сведения) визирных осей первой и второй ЛЛС в одну и ту же точку при осуществлении сканирования КОП лазерным излучением осуществляют наведение лазерного излучения, генерируемого лазерными генераторами в первой и второй ЛЛС, с помощью сканеров лазерного излучения 15 в обеих ЛЛС на устройство контроля 5 фиг.1. Наведение осуществляется при последовательной работе лазерных генераторов в обеих ЛЛС, как это было рассмотрено выше при штатном функционировании комплекса. Входящие в состав устройства контроля эталонные отражатели, выполненные на основе уголковых отражателей оптического видимого диапазона и инфракрасного диапазона длин волн, обеспечивают формирование обратного отраженного оптического сигнала - лазерного излучения, которое регистрируется фотоприемными блоками в обеих ЛЛС. Далее в обеих ЛЛС осуществляется режим стандартной настройки направления визирных осей на уголковый отражатель, входящий в состав устройства контроля 5, имеющего известные координаты своего местоположения относительно первой и второй ЛЛС. Указанные координаты устройства контроля 5 и уголкового отражателя 6 в формате глобальной навигационной спутниковой системы координат формируются на выходе третьего приемника сигналов глобальной навигационной спутниковой системы 36, входящего в состав устройства контроля 5. Информация об этих координатах с выхода приемника 36 поступает в блок связи 37, а через него и блок связи 33 - в блок обработки локационных сигналов 29 в обеих ЛЛС 1 и 2 на фиг.1. Одновременно в блок обработки локационных сигналов 29 с выхода приемника сигналов глобальной навигационной спутниковой системы 34 фиг.2 поступает информация о координатах соответствующей ЛЛС в формате глобальной навигационной системы. В результате осуществляется настройка и тестирование сканеров лазерного излучения 15 в обеих ЛЛС в режиме наведения визирных осей ЛЛС в единую точку пространства - на уголковый эталонный отражатель 6 в устройстве контроля 5, имеющий известные координаты, представленные в формате глобальной навигационной системы. При этом используется информация о положении сканера ЛИ 15, поступающая от датчиков углового положения сканера 15 с выхода блока 16 управления сканером в блок управления 30 лазерной локационной системой, а с выхода блока управления 30 - в блок обработки локационных сигналов 29. Дополнительная точная подстройка направления генерируемого и излучаемого лазерного излучения в ЛЛС 1 и 2 осуществляется с помощью дефлекторов лазерного излучения 13, 14, фиг.2. В результате настройки и тестирования наведения лазерного излучения от двух ЛЛС реализуется высокая точность наведения визирных осей обеих ЛЛС в единую заданную точку пространства, а также определение пространственных координат обнаруженных объектов с высокой точностью в формате глобальной навигационной спутниковой системы. После осуществления операций настройки и тестирования эталонный отражатель 6 в устройстве контроля 5 с помощью блока перемещения 35 эталонных отражателей опускается и выводится из поля зрения ЛЛС. Следует отметить, что контроль точности наведения визирных осей обеих ЛЛС в единую точку пространства с помощью устройства контроля 5 может осуществляться после выполнения полного цикла сканирования лазерным излучением всего КОП, а также каждый раз после однократного облучения и приема отраженного лазерного излучения от одной выбранной точки КОП.
В предлагаемом комплексе лазерной локации использованы лазерные генераторы, работающие в двух диапазонах длин волн: в видимом диапазоне и в инфракрасном диапазоне длин волн. Управление работой лазерных генераторов 9, 11 осуществляется с помощью блоков управления 10, 12, на входы которых поступают управляющие кодовые импульсные сигналы от генератора кодов 32. Последний работает непосредственно под управлением блока управления лазерной локационной системой 30, который определяет режим работы соответствующего лазерного генератора и определяет момент времени начала генерации лазерного излучения. При использовании лазерных генераторов, работающих на одной фиксированной длине волны генерации ЛИ, блок управления ЛЛС 30 вырабатывает только импульсы управления для генератора кодов 32, определяющие моменты времени начала генерации лазерного излучения для каждого генератора лазерного излучения 9, 11. Под воздействием данных управляющих импульсов от блока 30 генератор кодов 32 вырабатывает кодовые импульсы, которые поступают в соответствующие блоки управления 10, 12 и обеспечивают модуляцию генерируемого лазерного излучения в лазерных генераторах 9, 11 данными кодовыми импульсами, различными для каждого из лазерных генераторов. Модуляция лазерного излучения кодовыми импульсами позволяет в момент приема отраженного от КОП лазерного излучения определить, каким лазерным генератором и в какой лазерной локационной системе 1 или 2 это лазерное излучение было сформировано и направлено в соответствующую точку (область) КОП. Таким образом, кодовая модуляция лазерного излучения лазерных генераторов 9, 11 обеспечивает принадлежность принятого ЛИ соответствующему лазерному генератору и лазерной локационной системе. Опознавание кодовых импульсов при приеме отраженного от КОП лазерного излучения осуществляется в блоке обработки локационных сигналов 29 программно при обработке сигналов, поступивших из первого и второго 23, 24 блоков регистрации сигналов. После генерации лазерного излучения, промодулированного кодовыми импульсами от генератора кодов 32, лазерные генераторы 9, 11 вырабатывают один импульс ЛИ, который является основным рабочим импульсом, при приеме и обработке которого в блоке 29 извлекается информация об отражательных характеристиках наблюдаемой точки (области) в КОП. Возможен также режим работы ЛЛС, при котором в блоке обработки локационных сигналов 29 осуществляется обработка и извлечение информации из каждого импульса в кодовой группе импульсов, сформированных при модуляции лазерного излучения в лазерных генераторах 9, 11 от генератора кодов 32. Информация о сформированных кодах (кодовых группах импульсов) передается от генератора кодов 32 в блок обработки локационных сигналов 29, а также через блок связи 33 передается в блок обработки локационных сигналов 29 в другой лазерной локационной системы - второй ЛЛС или, соответственно, первой ЛЛС, в которую поступает информация от генератора кодов 32, находящегося во второй ЛЛС.
В предлагаемом комплексе лазерной локации возможно также использование для генерации лазерного излучения лазерных генераторов с перестройкой длины волны генерации в видимом (лазерный генератор 9) и в инфракрасном (лазерный генератор 11) диапазонах длин волн. Такая перестройка длины волны генерируемого лазерного излучения в каждом из лазерных генераторов осуществляется дискретно под воздействием управляющих сигналов от блока управления лазерной локационной системой 30, которые поступают в генератор кодов 32, вырабатывающий соответствующий управляющий кодовый сигнал, поступающий на управляющий вход соответствующего блока управления 10, 12 лазерного генератора 9, 11, что обеспечивает заданную перестройку длины волны лазерного излучения, генерируемого соответствующим лазерным генератором. Соответственно перестройке длины волны генерируемого лазерного излучения осуществляется сопряженная перестройка длины волны узкополосной полосы фильтрации в соответствующем блоке динамической спектральной фильтрации 25, 26 под воздействием поступающих управляющих сигналов от блока управления ЛЛС 30. В настоящее время промышленностью освоен выпуск лазерных генераторов с перестройкой длины волны генерации в видимом и инфракрасном диапазонах длин волн.
Синхрогенератор 31 вырабатывает последовательность синхронизирующих импульсов, обеспечивающих совместную синхронную работу всех элементов первой и второй лазерных локационных систем и всего комплекса. При этом синхрогенератор 31 в первой ЛЛС является ведущим, а синхрогенератор 31 во второй ЛЛС является ведомым, в котором последовательность синхроимпульсов жестко синхронизирована с импульсами от синхрогенератора 31 в первой ЛЛС. Синхроимпульсы от синхрогенератора 31 в первой ЛЛС через блок связи поступают в синхрогенератор 31 во второй ЛЛС и обеспечивают его синхронизацию с учетом задержки импульсов, обусловленной наличием базового расстояния В между первой и второй ЛЛС. Синхроимпульсы от синхрогенератора 31 поступают в блок управления ЛЛС 30, а также в блок обработки локационных сигналов 29, где обеспечивают синхронность выдачи управляющих импульсов и периодичность работы лазерных генераторов, а также остальных элементов, например фотоприемных блоков, блоков динамической спектральной фильтрации 25, 26, работающих под управлением блока управления 30. При этом, как было отмечено выше, фотоприемные блоки 21, 22 в обеих ЛЛС работают параллельно и синхронно осуществляют прием отраженного от КОП лазерного излучения в каждом рабочем такте работы комплекса лазерной локации. Лазерные генераторы 9, 11 в первой ЛЛС и ЛГ 9, 11 во второй ЛЛС работают попеременно через один рабочий такт, вследствие чего частота повторения импульсов излучения ЛГ в два раза ниже ведущей тактовой частоты повторения синхроимпульсов, генерируемых синхрогенератором 31. Следует отметить, что в одном конкретном рабочем такте генерируют импульсы ЛИ оба лазерных генератора 9, 11 в первой ЛЛС, а лазерные генераторы 9, 11 во второй ЛЛС генерируют импульсы лазерного излучения в другом - следующем такте работы комплекса лазерной локации.
Фотоприемные блоки 21, 22 фиг.2 представляют собой матричные многоэлементные фотоприемники типа матричных фотоэлектронных умножителей (ФЭУ), регистрирующих с высоким временным разрешением тонкую временную структуру отраженного от КОП лазерного излучения в двух спектральных диапазонах: в видимом диапазоне и в инфракрасном диапазоне длин волн. Высокочувствительные многоэлементные фотоприемники видимого и инфракрасного диапазонов длин волн освоены современной промышленностью. На управляющие входы фотоприемных блоков 21, 22 поступают управляющие импульсы от блока управления ЛЛС 30, обеспечивающие стробирование работы фотоприемных блоков для их защиты от помех обратного рассеивания от лазерного излучения, генерируемого лазерными генераторами 9, 11. Дополнительную и эффективную защиту фотоприемных блоков от помех обратного рассеивания ЛИ осуществляют первый 25 и второй 26 блоки динамической спектральной фильтрации. Указанные блоки динамической спектральной фильтрации обеспечивают узкополосную спектральную фильтрацию принимаемого лазерного излучения, отраженного от выбранной точки (области) КОП, в которую направлены визирные оси первой и второй ЛЛС. Длина волны фильтруемой спектральной полосы в блоках динамической спектральной фильтрации определяется управляющими сигналами, поступающими на управляющие входы указанных блоков от блока управления ЛЛС 30. Одновременно под воздействием управляющих сигналов от блока управления ЛЛС 30 возможно изменение ширины спектральной полосы пропускания блоков динамической спектральной фильтрации. Блоки динамической спектральной фильтрации обеспечивают, таким образом, узкополосную спектральную фильтрацию принимаемого ЛИ, а также быструю перестройку во времени параметров фильтрации принимаемого лазерного излучения перед регистрацией этого излучения фотоприемными блоками 21, 22. Управление параметрами фильтрации, а также моментом времени и промежутком времени фильтрации осуществляется с помощью управляющих сигналов от блока управления ЛЛС 30. Блоки динамической спектральной фильтрации обеспечивают узкополосную спектральную фильтрацию принимаемых лазерных излучений в видимом диапазоне (блок спектральной фильтрации 25) и в инфракрасном диапазоне длин волн (блок спектральной фильтрации 26). Длина волны спектрального пропускания блоков динамической спектральной фильтрации 25, 26 соответствует длине волны лазерного излучения соответствующего лазерного генератора 9 и 11, прием излучения которого осуществляет фотоприемный блок 21 (видимый диапазон) и фотоприемный блок 22 (инфракрасный диапазон). При изменении длины волны лазерного излучения, генерируемого лазерными генераторами, осуществляется сопряженное с этим изменение длины волны полосы спектрального пропускания блоков динамической спектральной фильтрации 25, 26 под действием управляющих сигналов от блока управления ЛЛС 30. Длительность управляющего импульса, поступающего на управляющий вход соответствующего блока динамической спектральной фильтрации от блока управления ЛЛС 30, определяет промежуток времени пропускания данным блоком фильтрации принимаемого лазерного излучения соответствующей длины волны и спектральной полосы, то есть длительность стробирования по времени входного принимаемого лазерного излучения. Этим обеспечивается оптическая изоляция оптических входов фотоприемных блоков 21 и 22 от лазерного излучения обратного рассеивания, возникающего при отражении зондирующих лазерных излучений, формируемых лазерными генераторами 9, 11, от участков атмосферы, примыкающих к сканеру ЛИ 15. Блоки динамической спектральной фильтрации обеспечивают надежную оптическую изоляцию и необходимое ослабление лазерного излучения обратного рассеивания, что позволяет реализовать высокую чувствительность и разрешающую способность по времени в фотоприемных блоках 21, 22 и предотвращает влияние помехи обратного рассеивания на характеристики фотоприемных блоков. Этим обеспечивается возможность регистрации тонкой временной структуры принимаемых оптических сигналов лазерного излучения, отраженного от КОП в видимом и инфракрасном диапазонах, что обуславливает увеличение эффективности обнаружения объектов. Блоки динамической спектральной фильтрации 25, 26 реализованы на основе акустооптических перестраиваемых фильтров, работающих в видимом (поз.25) и инфракрасном (поз.26) диапазонах длин волн. Перестраиваемый акустооптический фильтр представляет собой современную разработку в области оптоэлектроники и акустической техники, реализованную на базе акустооптической ячейки, состоящей из кристалла, оптически прозрачного для используемой длины волны видимого или ИК-диапазона длин волн, и пьезоэлемента, возбуждающего в этом кристалле ультразвуковые волны. При распространении оптического сигнала лазерного излучения через этот кристалл происходит взаимодействие лазерного излучения с динамической фазовой структурой, возбужденной в кристалле посредством ультразвуковых волн. В результате этого взаимодействия происходит изменение условий распространения лазерного излучения через данный кристалл для определенной узкой спектральной полосы принимаемого сигнала лазерного излучения. На основе этого физического эффекта промышленностью разработаны перестраиваемые акустооптические фильтры, работающие в видимом и ИК-диапазонах длин волн, обеспечивающие выделение (пропускание) узкой спектральной полосы из принимаемого оптического сигнала лазерного излучения. Принцип действия и основные характеристики акустооптических перестраиваемых фильтров приведены в монографии [5], стр.219-234, и в публикациях [6]. Данные фильтры реализованы на основе кристаллов ниобата лития, кварца, парателлурита, обладают высокой эффективностью, высокой разрешающей способностью, возможностью работы в широком угловом поле зрения. Перестройка узкой спектральной полосы пропускания фильтров реализуется с высоким быстродействием в динамическом режиме. Как было отмечено, акустооптические перестраиваемые фильтры обеспечивают защиту фотоприемных блоков от помехи обратного рассеивания, что обусловлено отсутствием распространения оптического (лазерного) излучения через кристалл в направлении оптического выхода при отсутствии возбуждающей кристалл ультразвуковой волны. Этим эффектом реализуется работа акустооптического перестраиваемого фильтра (блока динамической спектральной фильтрации) в качестве стробирующего оптического затвора для проходящего через него лазерного излучения. Блоки динамический спектральный фильтрации (25, 26) содержат собственно акустооптический перестраиваемый фильтр (кристалл с пьезовозбудителем) и генератор возбуждающей и перестраиваемой частоты, управляемый от блока управления ЛЛС 30.
В качестве блока динамической спектральной фильтрации может быть использован разработанный отечественной промышленностью активный квантовый фильтр [7], созданный на основе фотодиссоционного йодного лазера [8], обладающий весьма узкой полосой спектральной фильтрации, с возможностью перестройки длины волны фильтрации с помощью постоянного магнитного поля. Данный активный квантовый фильтр является высокочувствительным квантовым (лазерным) усилителем, работающим в ближнем инфракрасном диапазоне длин волн. Чувствительность данного квантового усилителя при приеме импульсных лазерных сигналов, отраженных от КОП, достигает квантового предела и обеспечивает регистрацию импульсов лазерного излучения, содержащих от двух до пяти фотонов в условиях сильной дневной фоновой засветки. Высокая квантовая чувствительность активного квантового фильтра особенно важна для предлагаемого комплекса при регистрации лазерного излучения при боковом нецентральном подсвете выбранной точки (области) в КОП с помощью, например, первой ЛЛС, и приеме отраженного от КОП лазерного излучения посредством фотоприемных блоков во второй ЛЛС.
В предлагаемом комплексе лазерной локации использованы современные средства вычислительной техники и электроники. Блок обработки локационных сигналов 29 представляет собой высокопроизводительный специализированный компьютер, снабженный интерфейсами для связи с несколькими источниками информации комплекса. Блок управления лазерной локационной системой представляет собой высокопроизводительный компьютер, обеспечивающий параллельное управление работой всеми блоками лазерной локационной системы и содержащий также средства отображения информации - дисплей. Приемники сигналов глобальной навигационной спутниковой системы 34 представляют собой выпускаемые промышленностью малогабаритные устройства, обеспечивающие непрерывный прием сигналов от группировки спутниковой глобальной навигационной системы и выдачу информации о своем местоположении на земной поверхности с высокой степенью точности в системе глобальных координат. Генератор кодов 32 представляет собой стандартное электронное устройство, генерирующее различные виды кодовых импульсов под управлением блока управления ЛЛС 30. Синхрогенератор 31 представляет собой стандартное электронное устройство, обеспечивающее формирование импульсов определенной частоты и синхронизацию единой работы всего комплекса лазерной локации вместе с входящими в него лазерными локационными системами.
Предлагаемый комплекс лазерной локации обладает высокой эффективностью обнаружения объектов и более высокой вероятностью распознавания наблюдаемых объектов за счет применения ряда технических средств, обеспечивающих повышение информативности процесса обнаружения и распознавания объектов. К таким средствам относятся средства регистрации отраженных сигналов импульсного лазерного излучения в некотором диапазоне углов относительно направления распространения исходного подсвечивающего лазерного излучения, то есть регистрации индикатрисы рассеивания или диаграммы направленности рассеянного излучения в небольшом угловом диапазоне. Это достигается использованием в комплексе двух лазерных локационных систем, разнесенных на некоторое фиксированное базовое расстояние В. В предлагаемом комплексе возможно дальнейшее повышение эффективности работы комплекса путем увеличения количества лазерных локационных систем, разнесенных между собой на фиксированные расстояния, расположенных вдоль одной линии, параллельной условной границе КОП. На фиг.4 представлена блок-схема комплекса лазерной локации, содержащего более двух ЛЛС, а именно: пять ЛЛС, расположенных вдоль одной линии и работающих в едином синхронном режиме, аналогичном рассмотренному выше совместному синхронному режиму работы двух ЛЛС. В предлагаемом варианте построения комплекса лазерной локации в каждом отдельном цикле (такте) работы осуществляется подсвет выбранной точки (области) в КОП 7 лазерным излучением от какой-либо одной лазерной локационной системы (ЛЛС) 1, 2, 38, 39, 40. Прием отраженного от КОП лазерного излучения осуществляется одновременно всеми указанными ЛЛС посредством фотоприемных блоков, содержащихся в указанных ЛЛС. При этом модуляция лазерного излучения в каждой из ЛЛС с помощью кодовых импульсов, формируемых генераторами кодов 32 в каждой из ЛЛС, позволяет обеспечить опознавание принимаемого отраженного от КОП ЛИ в отношении принадлежности этого излучения конкретной лазерной локационной системе и избежать возможных ошибок. В результате осуществления указанных циклов подсвета выбранной точки в КОП лазерным излучением в двух диапазонах длин волн и приема и регистрации отраженного ЛИ в блоке обработки локационных сигналов 29 в ведущей лазерной локационной системе поз.1 комплекса формируется информация об отражательных характеристиках выбранной точки (области) КОП в формате диаграммы направленности отраженного излучения или индикатрисы рассеивания в дискретном наборе пространственных углов. Полученная информация формируется в двух диапазонах длин волн - видимом и ИК-диапазонах. На основании полученной информации путем сравнения с информацией об отражательных характеристиках эталонных оптикоэлектронных и оптических приборов, хранящихся в устройстве памяти блока обработки локационных сигналов 29, выносится решение об обнаружении находящегося в выбранной точке КОП объекта и о принадлежности этого объекта к известному классу оптикоэлектронных приборов. Следует отметить, что при регистрации импульсов лазерного излучения, отраженного под различными углами от выбранной точки КОП фотоприемными блоками в различных ЛЛС 1, 2, 39- 40 возможно некоторое дублирование получаемой информации, что не снижает ценности общего объема получаемой информации об отражательных характеристиках объекта наблюдения в выбранной точке КОП. Следует также отметить особую важную функцию, выполняемую устройством контроля 5 во втором варианте построения комплекса лазерной локации в отношении контроля наведения визирных осей всех одновременно ЛЛС в единую выбранную точку (область) КОП.
По материалам представленной заявки проведены научные исследования и модельный эксперимент по регистрации лазерного излучения в видимом диапазоне от тест-объекта двумя лазерными локационными системами, разнесенными на некоторое базовое расстояние. На фиг.5 приведена осциллограмма ЛИ, зарегистрированная при фронтальном отражении зондирующего излучения от наблюдаемого объекта, представляющего собой некоторый ОЭ прибор, снабженный антибликовым покрытием. Для осциллограммы излучения от такого объекта характерно отсутствие сильного бликового отражения в начале импульса. Значительный отраженный сигнал имеет место в середине импульса, что свидетельствует о наличии отражательных элементов внутри данного ОЭ прибора. На фиг.6 приведена осциллограмма ЛИ, полученная от того же ОЭ прибора, но зарегистрированная второй лазерной локационной системой под углом порядка двух градусов относительно направления подсвета объекта лазерным излучением от первой ЛЛС. В данной осциллограмме следует отметить отсутствие тонкой структуры в пределах импульса и уменьшение уровня импульса. Сравнение представленных импульсов, полученных для одного и того же ОЭ прибора, но при наблюдении под разными углами, позволяет сделать вывод о принадлежности данного ОЭ прибора к некоторому классу ОЭ приборов. Наблюдаемый тест-объект принадлежал к классу ОЭ приборов со сложной внутренней структурой, был снабжен антибликовым покрытием и блендой, наличие которой приводит к уменьшению отраженного сигнала при наблюдении под небольшим углом и исчезновению характерной тонкой структуры во второй осциллограмме.
Таким образом, предлагаемый комплекс лазерной локации обеспечивает повышение эффективности обнаружения объектов и увеличение вероятности правильного распознавания и идентификации современных ОЭ приборов за счет повышения информативности процесса получения информации об отражательных характеристиках наблюдаемых объектов в контролируемой области пространства. Это достигается использованием подсвета выбранной точки (области) в КОП лазерным излучением в двух диапазонах длин волн, а также осуществлением подсвета лазерным излучением с двух и более направлений под различающимися углами падения лазерного излучения на одну и ту же выбранную точку КОП. Одновременно используется прием лазерного излучения, отраженного от одной и той же точки в КОП, с различающихся угловых направлений наблюдения и получение информации об индикатрисе рассеивания лазерного излучения от выбранной точки КОП в дискретном виде в указанных двух диапазонах длин волн и с возможностью перестройки длин волн сканирующего КОП лазерного излучения. Важным фактором является также возможность регистрации тонкой временной структуры в отраженном лазерном излучении с помощью современных многоэлементных фотоприемников лазерного излучения в видимом и ИК-диапазонах длин волн. Использование специального устройства контроля позволяет обеспечить высокую точность совмещения визирных осей различных ЛЛС в единой выбранной точке КОП. Использованные технические средства позволяют обеспечить высокую достоверность получаемой информации и обеспечить эффективность обнаружения и распознавания оптикоэлектронных приборов.
Источники информации
1. Патент РФ №2113717 от 20.06.1998 г.
2. Патент Франции FR №2547650 от 1984 г.
3. Патент GB №2256554 от 09.12.1992 г.
4. Патент РФ №2129288 от 20.04.1999 г., прототип.
5. Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. - М.: Радио и связь, 1985 г., стр.219-234; стр.134-167.
6. Балакший В.И., Манкевич С.К., Парыгин В.Н. и др. Квантовая электроника. Т.12, №4, 1985 г., стр.743-748.
7. Манкевич С.К., Носач О.Ю. Патент РФ №2133533 от 20.07.1999 г. Способ фильтрации оптических сигналов и устройство для его осуществления - активный квантовый фильтр.
8. Манкевич С.К., Носач О.Ю., Орлов Е.П. и др. Квантовая электроника т.30. №9, 2000 г. Лазерное приемное устройство с квантовым пределом чувствительности в ближнем РИС диапазоне.
9. Манкевич С.К., Носач О.Ю., Орлов Е.П. и др. Патент РФ №2191406 от 20.10.2002 г. Способ доставки излучения на движущийся объект и устройство для его осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2748459C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
Изобретение относится к лазерной локации и может быть использовано для обнаружения оптических и оптоэлектронных приборов наблюдения, транспортных средств, предметов вооружения, специальной аппаратуры. Комплекс лазерной локации содержит две лазерные локационные системы, расположенные на базовом расстоянии одна от другой, каждая из которых содержит лазерные генераторы на двух длинах волн, фотоприемные блоки, сканер лазерного излучения, дефлекторы лазерного излучения, блоки динамической спектральной фильтрации, блок обработки локационных сигналов, блок управления лазерной локационной системой, приемник сигналов спутниковой глобальной навигационной системы. Технический результат - повышение эффективности обнаружения и вероятности распознавания оптических и оптоэлектронных приборов и средств наблюдения при отсутствии бликов отраженных сигналов, повышение точности определения координат обнаруженных объектов и привязки их координат к глобальной навигационной системе координат. 5 з.п. ф-лы, 6 ил.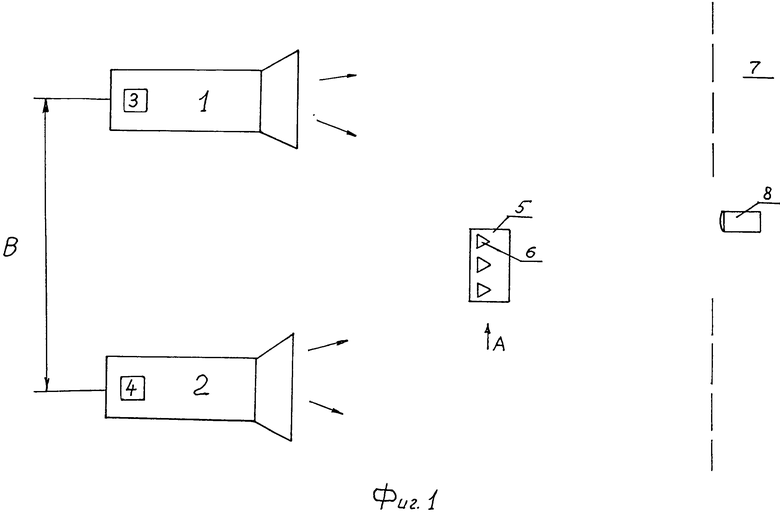
1. Комплекс лазерной локации, содержащий две лазерные локационные системы, расположенные в одной плоскости на поверхности Земли на базовом расстоянии В одна от другой, идентичные по своему составу, каждая из лазерных локационных систем содержит расположенные на первой оптической оси первый лазерный генератор с блоком управления, отражательное зеркало, сканер лазерного излучения (ЛИ) с блоком управления, расположенные на третьей оптической оси оптически связанные первый фотоприемный блок, первый объектив, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, блок управления лазерной локационной системой, выход которого подключен к блоку управления сканером ЛИ, приемник сигналов глобальной навигационной спутниковой системы, отличающийся тем, что введены в каждую из лазерных локационных систем первый дефлектор лазерного излучения, установленный на первой оптической оси между первым лазерным генератором и отражательным зеркалом, установленные на второй оптической оси оптически связанные второй лазерный генератор с блоком управления, второй дефлектор лазерного излучения, оптический выход которого посредством отражательного зеркала связан со сканером лазерного излучения, первый блок динамической спектральной фильтрации, установленный на третьей оптической оси между первым объективом и первым фотоприемным блоком, установленные на четвертой оптической оси оптически связанные второй фотоприемный блок, второй блок динамической спектральной фильтрации, второй объектив, оптический вход которого посредством отражательного зеркала связан со сканером ЛИ, блок обработки локационных сигналов, синхрогенератор, генератор кодов, блок связи, первый и второй блоки регистрации сигналов, входы которых подсоединены соответственно к выходам первого и второго фотоприемных блоков, а выходы подключены ко входам блока обработки локационных сигналов, а также введено устройство контроля, расположенное в плоскости двух лазерных локационных систем на поверхности Земли на фиксированном расстоянии от первой и второй лазерных локационных систем, содержащее эталонные отражатели ЛИ, блок перемещения эталонных отражателей и электрически связанные третий приемник сигналов глобальной навигационной спутниковой системы и третий блок связи, при этом входы блоков управления первым и вторым лазерными генераторами подключены к генератору кодов, выходы которого подключены к блоку обработки локационных сигналов и блоку связи, а второй вход подключен к выходу синхрогенератора, выходы которого подсоединены также к блоку обработки локационных сигналов, блоку управления лазерной локационной системой и к блоку связи, приемник сигналов глобальной навигационной спутниковой системы подключен к блоку обработки локационных сигналов, к блоку связи и к блоку управления лазерной локационной системой, первый и второй фотоприемные блоки подключены к блоку управления лазерной локационной системой.
2. Комплекс по п.1, отличающийся тем, что в нем в лазерных локационных системах первый и второй фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
3. Комплекс по п.1, отличающийся тем, что в нем в лазерных локационных системах первый и второй динамические спектральные фильтры выполнены на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
4. Комплекс по п.1, отличающийся тем, что в нем в лазерных локационных системах динамические спектральные фильтры выполнены на основе активного квантового фильтра с перестройкой полосы пропускания и длины волны фильтрации магнитным полем.
5. Комплекс по п.1, отличающийся тем, что в нем в лазерных локационных системах в качестве лазерных генераторов использованы лазерные генераторы с перестройкой длин волн генерации в видимом и инфракрасном диапазонах длин волн.
6. Комплекс по п.1, отличающийся тем, что он содержит три и более лазерные локационные системы, идентичные по составу, расположенные на одной прямой линии на фиксированных расстояниях одна от другой, работающие синхронно и обменивающиеся информацией посредством блоков связи, входящих в каждую из лазерных локационных систем.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1997 |
|
RU2129288C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| ПЕНОБЕТОНОСМЕСИТЕЛЬ | 2003 |
|
RU2256554C1 |

