Изобретение относится к летной эксплуатации воздушных судов (ВС) и может быть использовано при разработке бортовой интеллектуальной системы управления полетом. Современные средства авионики достаточно остро поставили проблему распределения функций управления между человеком и автоматикой, в частности между пилотом и управляющей системой (УС), т.е. автопилотом. Согласно определению распределение функций управления - процесс организации управления, состоящий в группировке функций по определенным признакам и по исполнителям [1].
Управление полетом современного ВС - это сложный комплекс операций по определению текущих пилотажно-навигационных параметров, сравнению их с заданными и допустимыми и активному воздействию на органы управления и на рулевые поверхности самолета с целью максимальной точности выдерживания расчетного маршрута полета. Отношения «пилот-УС» являются частью более общих отношений «пилот-ВС». Взаимодействие пилота с ВС включает, с одной стороны, воздействие на его системы при помощи различных средств и органов управления, с другой стороны? - информирование пилота о состоянии объекта управления и окружающей обстановке посредством бортовых информационных систем (см. патент РФ Система сбора, регистрации, передачи, обработки и анализа №2194307, МПК G07C 5/08, 10.12.2002).
С позиции проектирования проблема распределения функций является нестационарной. Например, автоматика может отказать, а человек подвержен стрессам. Таким образом, следует осуществлять динамическое или адаптивное распределение функций. Общим для такого подхода является положение о зависимости степени автоматизации процессов управления от характеристик решаемых задач, условий деятельности и величины когнитивной или умственной рабочей нагрузки (workload) оператора.
Основные трудности при этом связаны с определением критерия распределения задач. Попытки использования для оценки рабочей нагрузки на пилота различных психофизиологических параметров (см. патент №2234850, 27.08.2004, Способ прогнозирования профессиональной пригодности человека-оператора для работы в условиях высокого эмоционального напряжения, МПК7 A61B 5/02, G01N 33/48) ожидаемого результата не дали.
Возможен и другой способ динамического распределения функций управления, при котором в случае работы систем без отклонений текущих параметров пилот сам принимает решение и осуществляет передачу функций автоматике или оставляет их для выполнения вручную (см. с.377-379, [2]). Однако пилот может переоценить или, наоборот, недооценить свои возможности или ресурсы автоматики. Кроме того, автоматика с высокой степенью доверия будет использоваться часто, в противном случае может неоправданно выбираться ручное управление.
Современные тенденции развития бортовых систем управления связаны с их дальнейшей интеллектуализацией, основанной на технологиях обработки знаний для автоматизации функций управления и поддержки действий экипажа как в нормальных, так и в нештатных ситуациях, возникающих в процессе полета.
Автоматика требует постоянного внимания, «сканирования», как это называют пилоты; акцент в деятельности перемещается на мыслительные или, в психологических терминах, когнитивные процессы на основе использования им не количественных, а качественных критериев оценки надежности, позволяющих проводить целостный анализ возникающих ситуаций. Зависимость результатов автоматизации от совместимости человека и техники проявляется в критических ситуациях. (Критическая ситуация - состояние, которое характеризуется нарушением предельных значений контролируемых параметров хотя бы одной из систем ВС).
Известно техническое решение, взятое нами в качестве прототипа, (Способ и устройство предупреждения критических режимов работы системы оператор-объект, патент №2114456 от 27.06. 1998, МПК6 G05В 13/00, G 05 D 1/00), в котором для предупреждения выхода на критический режим системы оператор-объект запоминают опасные факторы и команды для вывода системы из сложившейся ситуации. Затем, сравнив текущие и опасные факторы и выявив их несоответствие, реализуют заготовленные на данный случай команды управления. Недостатки прототипа, как способа, состоят в следующем:
- непредсказуемость критических ситуаций в связи с высоким динамизмом;
- вводимый критерий «сложность управления» формируется на основе оценки вероятности ошибок оператора, что снижает объективность реальной ситуации;
- рассматриваются варианты действий пилота в критических ситуациях без учета его совместных действий с управляющей системой.
В отличие от прототипа, где субъектом управления ВС выступает пилот, в предлагаемом техническом решении субъектом выступает сложная система пилот+управляющая система, что позволяет получить синергетический эффект - повысить безопасность полета путем дублирования процессов контроля и управления ВС.
При этом решаются следующие задачи:
- контроль технического состояния бортовых систем и анализ выдерживания режимов полета;
- оценка степени сложности бортовой системы, приведшей к возникновению критической ситуации;
- оценка реальной степени интенсивности действий пилота (не участвующего в пилотировании) по взаимодействию с критической бортовой системой;
- распределение функций управления между пилотом и автоматикой в зависимости от степени сложности бортовой системы и интенсивности действий экипажа с учетом величины критерия интеллекта IQ пилота.
Техническим результатом изобретения является расширение функциональных возможностей процесса управления ВС с целью повышения безопасности полета.
Поставленная цель изобретения достигается тем, что в способе распределения функций управления воздушным судном, в частности, между пилотом и управляющей системой, путем контроля текущих значений параметров бортовых систем и сравнения их с допустимыми регистрируют критическую систему, параметры которой не соответствуют допускам, задают стандартные рабочие процедуры контроля и управления бортовыми системами, в процессе полета ВС измеряют наработку элементов бортовых систем и формируют новые значения надежности элементов критической системы для измерения информативности диагностирования блоков критической системы, согласно стандартным рабочим процедурам измеряют интенсивность действий пилота с критической системой, фиксируют коэффициент интеллекта пилота, степень его ситуационной осведомленности и задают ее пороговое значение, а по результатам их сравнения принимают решение о субъекте управления.
В течение всего полета экипаж располагает постоянно обновляемой информацией, как принято говорить, ситуационной осведомленностью. Под ситуационной осведомленностью пилота будем понимать такое его состояние, которое заключается в принятии управленческих решений по мере возникновения проблем в соответствии со складывающейся ситуацией в полете. Возникает вопрос: кто же должен управлять? Но всегда должен работать основной принцип летной эксплуатации: каждой задаче - адекватный уровень автоматизации. Ответ на поставленный вопрос может быть получен по результатам количественной оценки степени ситуационной осведомленности.
Степень ситуационной осведомленности (ССО) - мера соотношения количества информации о состоянии бортовых систем и возможностей оператора (пилота) по управлению ВС. По величине ССО можно определить рациональный диапазон работы пилота или управляющей системы.
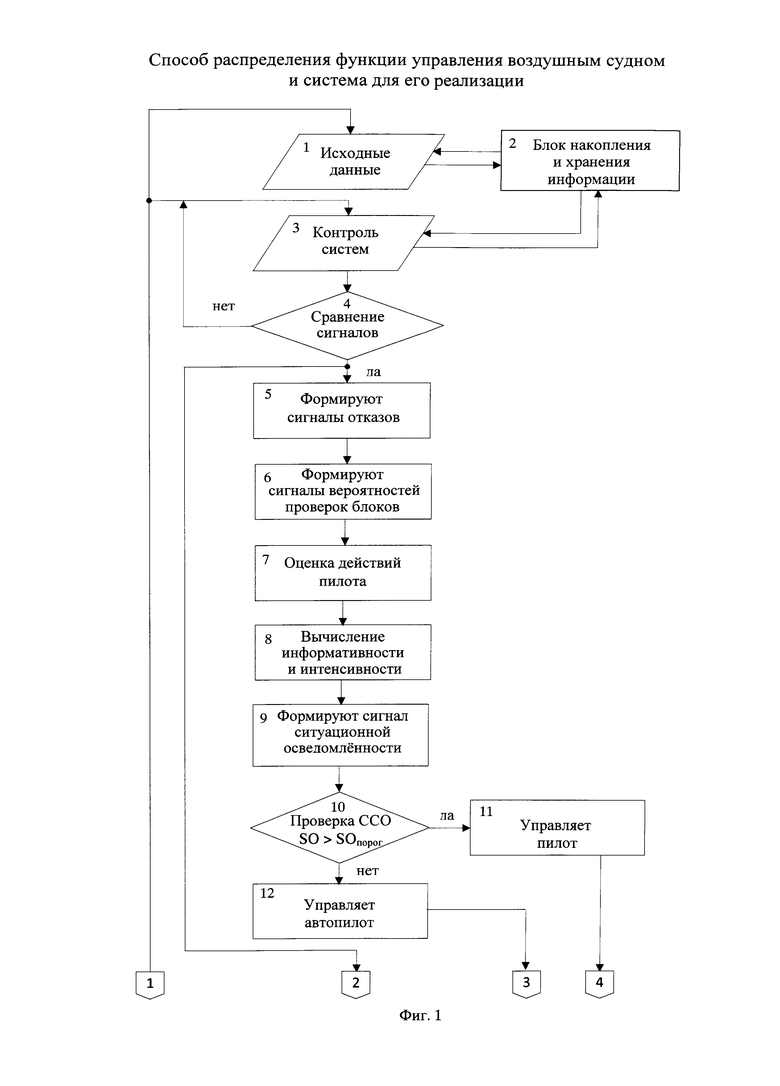
Реализация предлагаемого способа поясняется блок-схемой алгоритма, представленной на фиг.1. Для конкретного воздушного судна и экипажа формируют исходные данные (блок 1), фиксируемые в блоке накопления и хранения информации (блок 2), в который в течение полета поступают сигналы о состоянии бортовых систем из блока 3. Поступившие сигналы о состоянии блоков систем в блоке 4 сравнивают с допустимыми значениями и в случае их несоответствия выявляют критическую систему, для которой с учетом наработки блоков вычисляют текущую вероятность безотказной их работы и вероятность отказа (блок 5). По найденным величинам с учетом специфики функциональной схемы критической системы вычисляют вероятности положительных и отрицательных результатов проверок блоков системы (блок 6). Согласно стандартным рабочим процедурам контроля и управления критической системой анализируют деятельность пилота (блок 7). По результатам выполненных операций вычисляют информативность системы и интенсивность деятельности пилота (блок 8), а затем по величине коэффициента интеллекта пилота, тестируемого при отработке на тренажере одной из особых ситуаций, формируют сигнал степени ситуационной осведомленности (блок 9). Данный сигнал сравнивают с пороговой величиной степени ситуационной осведомленности, которая равна коэффициенту интеллекта пилота, тестируемого в обычных условиях (блок 10). При положительной разности сигналов между вычисленным и пороговым значениями управление принимает пилот (блок 11), а при отрицательной - принимает автопилот (блок 12).
Количественно ССО находят из следующей зависимости:

где SOi - степень ситуационной осведомленности пилота в критической ситуации, созданной i-й бортовой системой;
iqϕ - коэффициент интеллекта ϕ-го пилота, где ϕ=1 (КВС), 2 (второй пилот) (рабочий коэффициент интеллекта фиксируется при отработке пилотом на тренажере одной из особых ситуаций);
ΣIi - суммарная информативность диагностирования всех j-х блоков i-й системы, создавшей критическую ситуацию;
τi - интенсивность алгоритма деятельности ϕ-го пилота в процессе слежения, контроля, принятия и реализации решения по i-й системе, создавшей особую ситуацию (член экипажа, осуществляющий пилотирование, участвует в качестве консультанта).
Зависимость учитывает: во-первых, интеллектуальный уровень членов экипажа: чем он выше, тем большее степень осведомленности, т.е. пилот-профессионал даже по минимальному объему располагаемой информации в состоянии принять правильное решение по управлению ВС в критической ситуации;
во-вторых, чем больше величина суммарной информативности диагностирования системы, создавшей критическую ситуацию, тем объективнее результаты оценки технического состояния данной системы;
в-третьих, чем меньше суммарная интенсивность алгоритма деятельности пилота в процессе слежения, контроля, принятия и реализации решения по критической системе, тем больше степень ситуационной осведомленности, так как в этом случае пилот менее загружен и вероятность совершения ошибки и принятия неправильного решения будет минимальна.
Для количественной оценки ССО выполняют следующую последовательность операций:
1 этап. В общем случае информативность проверки n-го блока определяется выражением [3]:

где 


qn - вероятность отказа n-го функционального блока системы из множества блоков Bw, Bw - множество блоков, оставшихся непроверенными после положительного результата проверки ∏n,

Bv - множество блоков, оказавшихся проверенными в результате проверки ∏n,

Как показано в работе [4], qn является функцией от наработки блока в процессе эксплуатации. Это объясняется снижением его надежности рn согласно зависимости [5]
pn=еλt,
где λ - интенсивность отказа блока (паспортная величина, определяется экспериментально в процессе производства блока);
t - время наработки блока.
Выполнив весь комплекс проверок условно в отличие от наземных, найдем Σii - суммарную информативность диагностирования критической системы, т.е тем самым степень ее сложности.
2 этап. Технология работы экипажа представляет собой последовательные действия каждого члена экипажа и графически изображается в виде технологического графика, на основании которого формируется алгоритм действий члена экипажа в рассматриваемой критической ситуации [2]. Алгоритм обычно разбивают на отдельные участки, границы которых определяются управляющими (сенсорными и сенсомоторными) воздействиями. Действия пилота являются совокупностью оперативных единиц, соответствующих таким единичным элементам информации или элементарным действиям, которые протекают целостно, одномоментно и которыми пилот пользуется для достижения поставленной цели.
Интенсивность деятельности пилота рассчитывается как отношение числа оперативных единиц к продолжительности соответствующего участка или алгоритма в целом. Установлено, что допустимая величина интенсивности равна 1,66 ОЕ/с, а пороговая - 2 ОЕ/с. Общая интенсивность пилотирования составляет 1, 45 ОЕ/с. Поэтому в случае пилотирования суммарная интенсивность не должна превышать величину допустимой интенсивности, так как при этих условиях число ошибок минимально.
После выявления системы, создавшей критическую ситуацию, с учетом этапа полета и согласно стандартной рабочей процедуре (в которой задано число моторных и сенсомоторных операций) с учетом уровня подготовки пилота можно рассчитать интенсивность его деятельности. В отличие от методики, изложенной в работе [2] и справедливой для старых типов ВС, воспользуемся упрощенной с учетом специфики стеклянной кабины. Дело в том, что для современных типов ВС, когда информация отображается на дисплеях, выполняющих функции нескольких десятков приборов и расположенных в середине центральной приборной доски, расчет временных характеристик членов экипажа можно производить:
- при выполнении каждой сенсорной операции
β=1,1+0,05α, с,
где α - угол переноса взгляда с центра дисплея на показания прибора, характеризующего данную критическую ситуацию;
- при выполнении моторной операции - управляющих воздействий
γ=0,9+log2S, с,
где S - расстояние до органов управления, см.
Разделив число операций (ОЕ) на суммарную величину временных затрат операций стандартной рабочей процедуры данной критической ситуации, определим интенсивность деятельности члена экипажа:
τi=ΣОЕ/ΣМ(Т), ОЕ/с,
где ΣОЕ=Ni(β)+Ni(γ) - число операций,
ΣМ(Т)=Тβ+Тγ - суммарная величина временных затрат операций стандартной рабочей процедуры данной критической ситуации.
3 этап. Оценка критериев IQ (пороговой величины) и iqϕ. Предлагается, по рекомендации авиационных психологов, использовать один из самых известных тестов для измерения уровня интеллектуального развития - тест Векслера (или Шкала Векслера), в частности тест "Конструирование блоков" ("Кубики Косса"), который позволяет диагностировать двигательную координацию и визуальный синтез, а также оценивать точность и время решения. Приведенные показатели весьма важны при оценке деятельности пилота. Тем более, для повышения объективности критерия в изобретении предлагается тестирование iqϕ выполнять в процессе тренажерной отработки критической ситуации, временно прервав ее, а IQ в обычных спокойных условиях.
4 этап. Сравнение вычисленного значения ССО с пороговой величиной и передача управления либо экипажу, либо автопилоту.
При разработке формулы на систему был выполнен патентный поиск аналогов и выбор прототипа. Известны различные технические решения для управления ВС. В частности, известна Универсальная система управления общесамолетным оборудованием (патент RU №2263045, МПК7 В64С 13/00). Система обеспечивает выполнение функций управления общесамолетным оборудованием в режиме ручного и автоматического управления (если это предусмотрено органами управления и элементами каждой системы отдельно). Режим ручного управления осуществляется путем получения команды на выполнение циклограммы управления исполнительным механизмом самолетной системы от органов управления, находящихся в кабине. В режиме автоматического управления признаки активации циклограмм управления формируются на основе информации, принимаемой системой от самолетных систем. Ручное управление имеет более высокий приоритет, чем автоматическое управление. Однако по-прежнему основная нагрузка по распределению управления ВС возлагается на экипаж без учета интенсивности его загрузки.
Из аналогов можно считать изобретение "Система поддержки экипажа в опасных ситуациях" (патент RU 2128854, G05D 1/00, опубликован 10.04.1999).), содержащая датчики, систему отображения информации, базу знаний. Недостатком данной системы является отсутствие возможности выдачи рекомендаций в случаях отсутствия в Базе знаний информации по возникшим аварийным ситуациям.
При разработке бортовых алгоритмов и систем в современных условиях переходят от автоматизации отдельных фрагментов сеансов функционирования ВС к автоматизации отдельных типовых ситуаций полета [6, см. стр.4-16], что учтено при выборе прототипа. Из аналогов уровня техники близким техническим решением по количеству существенных признаков в качестве прототипа системы реализации предложенного способа следует считать бортовую интеллектуальную систему управления полетом (см. [7], рис.8.1, с.389), которая включает объект управления (ВС), датчики, систему контроля полетом, анализ обстановки, контроль безопасности, принятие решения, автопилот (управляющая система), командный интерфейс, средства отображения информации, пилота (оператор), исполнительные механизмы, рабочую базу знаний, обучение. В полете активная роль пилота в управлении ВС обеспечивается благодаря наличию прямой и обратной его связи с блоком принятия решения посредством командного интерфейса, что позволяет пилоту при любой ситуации взять руководство полетом в свои руки. Однако при этом отсутствует учет влияния степени сложности возникшей ситуации (порой достаточно роль субъекта управления ВС передать автоматике) и, главное, насколько члены экипажа задействованы в обеспечении безопасности полета.
Для реализации предложенной совокупности операций способа разработана в материализованном виде система обеспечения управления ВС в зависимости от величины степени ситуационной осведомленности пилота.
Предлагаемая система содержит ВС, датчики, блоки системы контроля полета, анализа обстановки, контроля безопасности, принятия решений, рабочей базы знаний, обучения, командного интерфейса, системы отображения информации, исполнительных механизмов, автопилота, содержащая, кроме того, блок оценки степени ситуационной осведомленности пилота, соединенный своим входом со вторым выходом блока системы контроля полета, первым выходом блок оценки соединен со вторым входом блока анализа обстановки, вторым и третьим выходами блок оценки соединен соответственно с четвертым и пятым входами блока принятия решений, причем блок оценки степени ситуационной осведомленности пилота содержит блок регистрации допустимых значений блоков бортовых систем, блок определения выхода контролируемых параметров за допустимые значения, блок формирования текущих значений контролируемых параметров, блок регистрации времени наработки каждого блока систем, блок вычисления надежности и вероятности отказов блоков систем, блок вычисления вероятности положительного и отрицательного результата проверок блоков критической системы, блок формирования результатов регистрации текущей наработки блоков систем, блок вычисления количества и времени выполнения сенсорных и моторных операций, блок вычисления информативности критической системы и интенсивности деятельности пилота, блок вычисления степени ситуационной осведомленности пилота и блок принятия решения, соединенный своими выходами соответственно с четвертым и пятым входами блока принятия решений системы, а входом соединен с выходом блока вычисления степени ситуационной осведомленности, соединенного своим входом с выходами соответственно блока вычисления количества сенсорных и моторных операций и времени их выполнения и блока вычисления вероятности положительного и отрицательного результата проверки, соединенного своими входами с выходами блока вычисления надежности и вероятности отказа блоков бортовых систем и блока определения выхода контролируемых параметров за допустимые значения, причем вход блока вычисления надежности и вероятности отказа блоков бортовых систем соединен с выходами блока регистрации времени предыдущей наработки и блока регистрации текущей наработки блоков бортовых систем, а блок определения выхода контролируемых параметров за допустимые значения входами соединен с выходами блока регистрации допустимых значений блоков бортовых систем и блока формирования текущих значений контролируемых параметров.
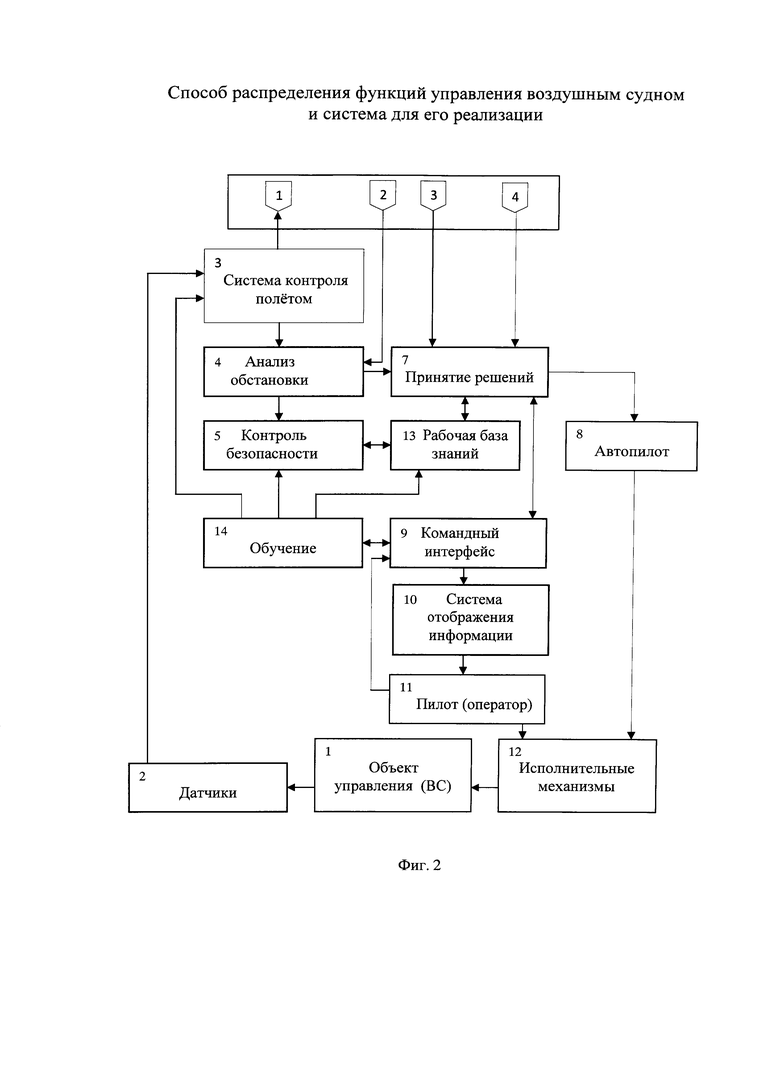
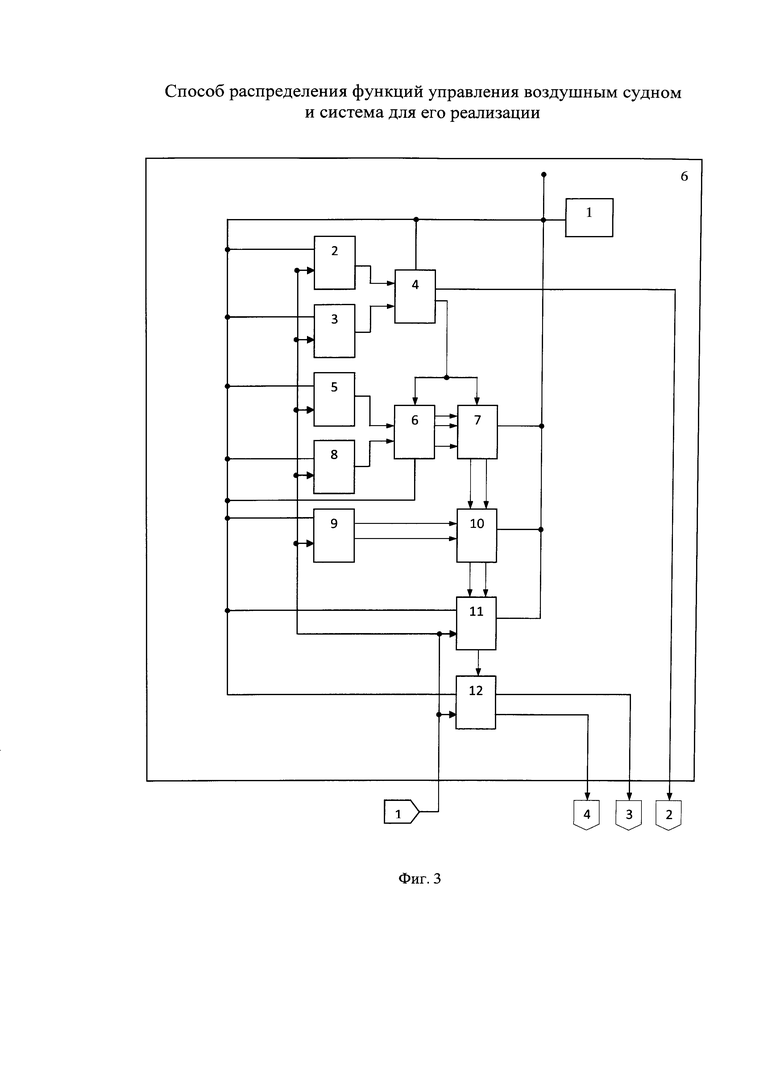
Сущность бортовой интеллектуальной системы управления полетом с каналами связи с блоком оценки степени ситуационной осведомленности пилота (ССО) приведена на фиг.2; функциональная схема предлагаемого блока оценки ССО показана на фиг.3; далее приведены блоки, входящие в состав блока оценки ССО: на фиг.4 представлен блок регистрации времени наработки каждого блока бортовых систем, на фиг.5 - блок регистрации допустимых значений блоков систем, на фиг.6 - блок формирования текущих значений контролируемых параметров блоков систем, на фиг.7 - блок формирования результатов регистрации текущей наработки блоков систем, на фиг.8 - блок выявления критической системы, на фиг.9 - блок вычисления надежности
и вероятности отказов, на фиг.10 - блок вычисления вероятности положительного и отрицательного результата проверки каждого блока критической системы, на фиг.11 - блок вычисления общего количества сенсорных и моторных операций и времени их выполнения, на фиг.12 - блок вычисления информативности критической системы и интенсивности деятельности пилота, на фиг.13 - блок вычисления степени ситуационной осведомленности пилота и на фиг.14 - блок принятия решения.
Бортовая интеллектуальная система управления полетом (фиг.2) включает: 1 - объект управления (ВС), 2 - датчики, 3 - систему контроля полетом, 4 - анализ обстановки, 5 - контроль безопасности, 6 - оценка степени ситуационной осведомленности пилота, 7 - принятие решения, 8 - автопилот (управляющая система), 9 - командный интерфейс, 10 - средства отображения информации, 11 - пилот (оператор), 12 - исполнительные механизмы, 13 - рабочая база знаний, 14 - обучение. Выходом 1 и входами 2, 3, 4 система соединена с блоком оценки степени ситуационной осведомленности пилота (фиг.3), который содержит: блок 1 генератор тактовых импульсов, с периодом следования Т и скважностью <<1, блок 2 регистрации допустимых значений контролируемых параметров δij (i=1…K) (j=1…L) каждого блока i-й системы, блок 3 определения выхода контролируемых параметров δij (i=1…K) (j=1…L) за допустимые значения sij (i=1…K) (j=1…L) и выявления критической системы, блок 4 формирования текущих значений контролируемых параметров Sij (i=1…K) (j=1…L) каждого блока i-й системы, блок 5 регистрации времени наработки tij (i=1…K) (j=1…L) каждого блока i-й системы к моменту очередного включения устройства, блок 6 вычисления надежности pyj (j=1…L) и вероятности отказов qyj (j=1…L) блоков у ой критической системы, блок 7 вычисления вероятности положительного и отрицательного результата проверки каждого блока y-й критической системы, блок 8 формирования результатов регистрации текущей наработки Δij (i=1…K) (j=1…L) каждого блока i-й системы, блок 9 вычисления общего количества сенсорных и моторных операций и времени их выполнения, блок 10 вычисления информативности y-й критической системы и интенсивности деятельности пилота, блок 11 вычисления степени ситуационной осведомленности пилота и блок 12 принятия решения.
Блок 1 генератор тактовых импульсов (фиг.3) с периодом следования Т, скважностью <<1 и с заданным периодом следования импульсов Т.
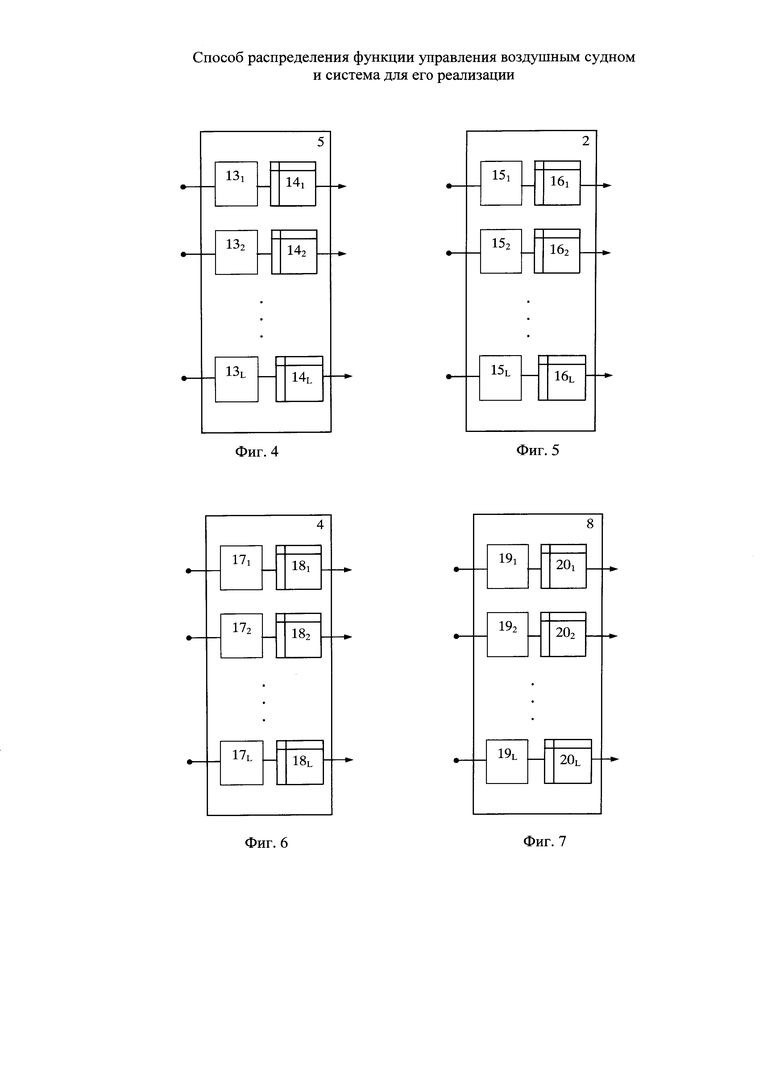
Блок 2 регистрации допустимых значений контролируемых параметров δij (i=…K) (j=1…L) каждого блока i-й системы (фиг.5) содержит L устройств приема значений контролируемых параметров 15j (j=1…L) и L устройств хранения этих параметров 16j (j=1…L).
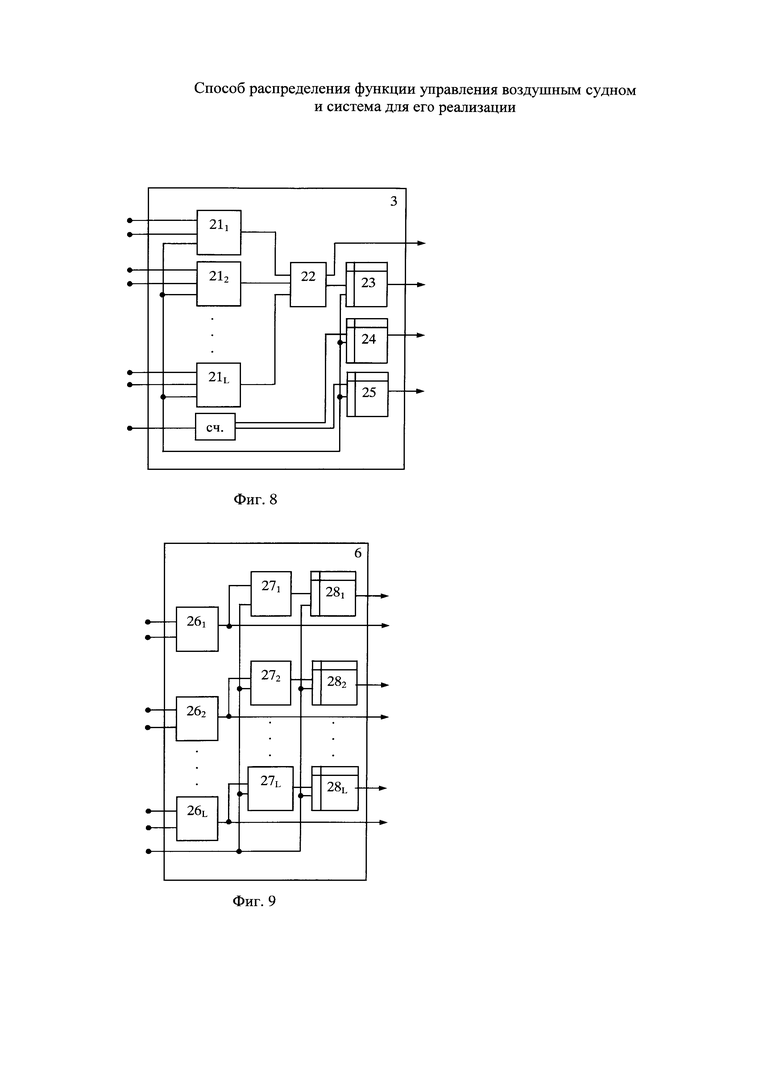
Блок 3 определения выхода контролируемых параметров Sij (i=1…K) (j=1…L) за допустимые значения δij (i=1…K) (j=1…L) выявления критической системы (фиг.8) содержит L устройств сравнения контролируемых параметров 21j (j=1…L), счетчик количества проверенных блоков, элемент, реализующий функцию «или» 22, и 3 устройства хранения полученной информации 23, 24, 25.
Блок 4 формирования текущих значений контролируемых параметров sij (i=1…K) (j=1…L) каждого блока i-й системы (фиг.6) содержит L устройств приема текущих значений контролируемых параметров 17j (j=1…L) и L устройств хранения этих параметров 18j (j=1…L).
Блок 5 регистрации времени наработки tij (i=1…K) (j=1…L) каждого блока i-й системы к моменту очередного включения устройства (фиг.4) содержит L устройств приема значений времени наработки блоками 13j (j=…L) и L устройств хранения этих значений 14j (j=1…L).
Блок 6 вычисления надежности pyj (j=1…L) и вероятности отказов qyj (j=1…L) блоков у-й критической системы (фиг.9) содержит L устройств вычисления надежности блоков с учетом времени наработки рij:=e-λ(t[i,j]+Δ[i,j]) 26j (j=1…L), L устройств вычисления вероятности отказов qij:=1-рij у-й критической системы 27j (j-1…L) и L устройств хранения полученных значений вероятности отказов 28j (j=1…L).
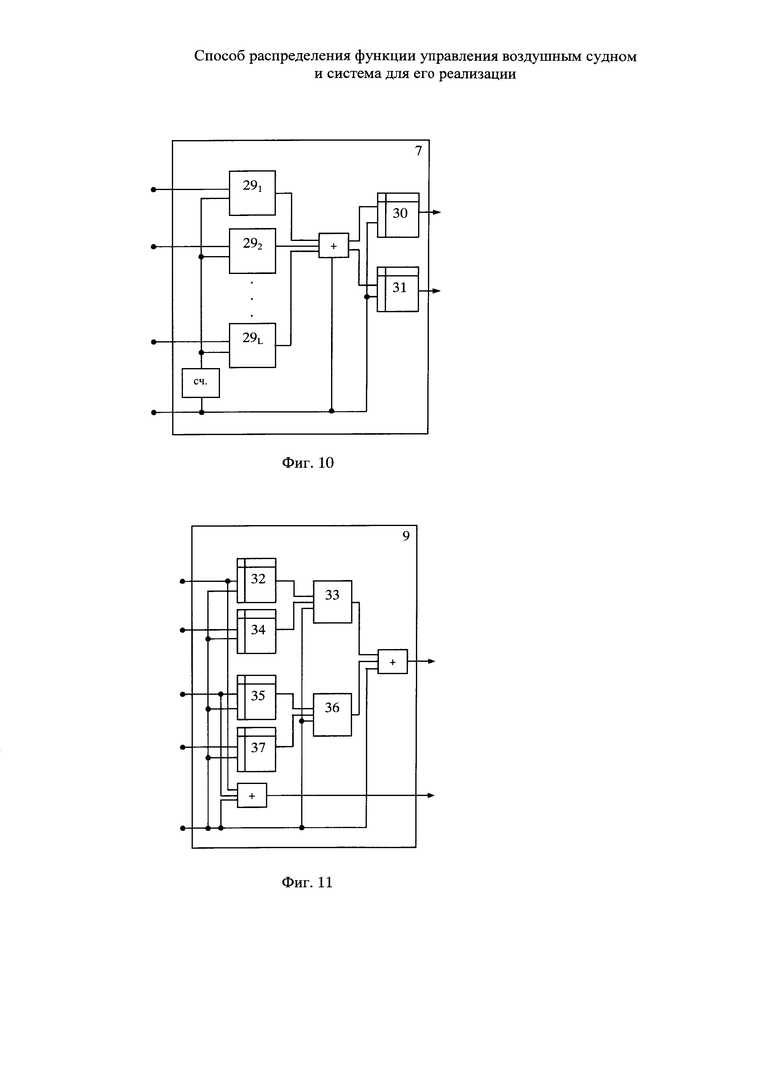
Блок 7 вычисления вероятности положительного p+ и отрицательного p- результата проверки каждого блока y-й критической системы (фиг.10) содержит L устройств вычисления вероятности 29j (j=1…L), счетчик, определяющий подключение устройств для вычисления положительного или отрицательного результата проверки блоков, сумматор, определяющий значения вычисления вероятности положительного или отрицательного результата проверки и 2 устройства хранения полученных значений 30, 31.
Блок 8 формирования результатов регистрации текущей наработки Δij (i=1…K) (j=1…L) каждого блока i-й системы после включения устройства (фиг.7) содержит L устройств приема значений текущей наработки каждого блока i-й системы 19j (j=1…L) и L устройств хранения этих параметров 20j (j=1…L).
Блок 9 вычисления общего количества сенсорных и моторных операций и времени их выполнения (фиг.11) содержит 4 устройства хранения исходной информации 32, 34, 35, 37, сумматор, вычисляющий значение ОЕу, 2 устройства, вычисляющих время выполнения сенсорных и моторных операций 33, 36 и еще один сумматор вычисляющий общее время Му(Т).
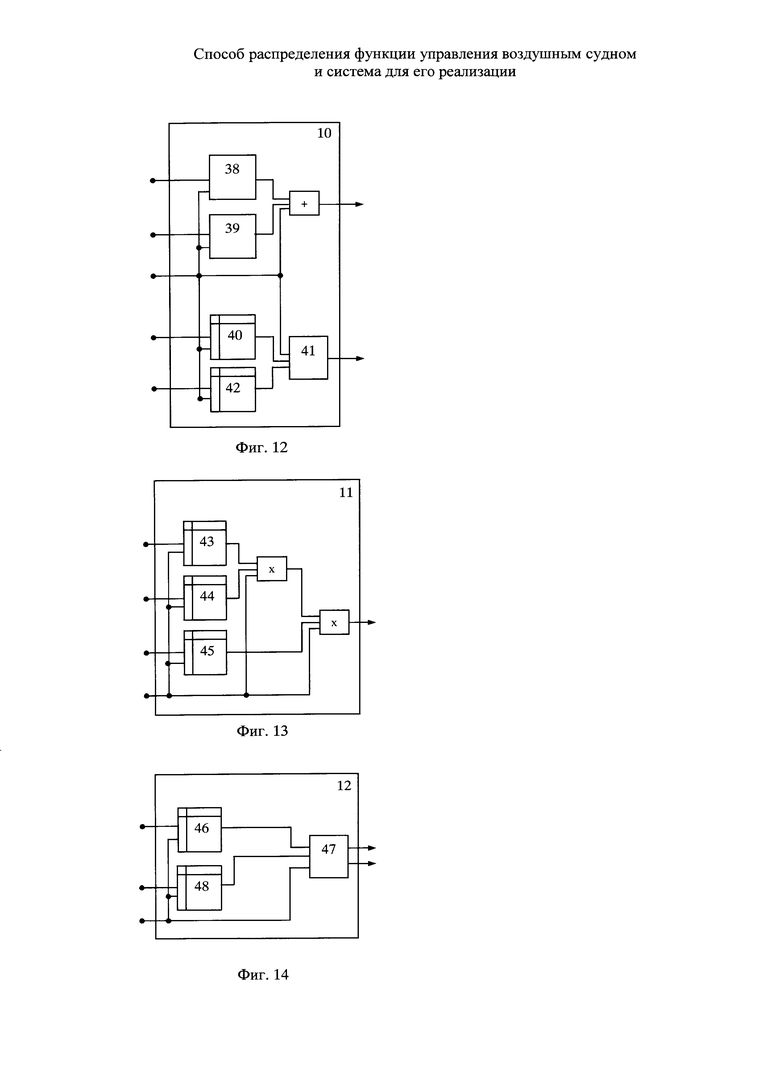
Блок 10 вычисления информативности у-й критической системы и интенсивности деятельности пилота (фиг.12) содержит 2 устройства вычисления информативности у-й системы 38, 39 и сумматор, вычисляющий полученные на предыдущем шаге значения информативности, 2 устройства хранения полученных значений сенсорных и моторных операций и времени их выполнения 40, 42 и устройство, вычисляющее интенсивность деятельности пилота 41.
Блок 11 вычисления степени ситуационной осведомленности пилота (фиг.13) содержит 3 устройства хранения исходной информации 43, 44, 45 и 2 умножителя, вычисляющих степень ситуационной осведомленности пилота SO.
Блок 12 принятия решения (фиг.14) содержит 2 блока хранения исходной информации 46, 48 и устройство, определяющее передачу управления пилоту или автопилоту 47.
Система работает по следующей схеме. Полученная информация о динамике ВС 1 фиг.2 и техническом состоянии бортовых систем с датчиков 2 поступает для сбора и регистрации в систему контроля полетом 3. Блок анализа обстановки 4 на основе сенсорной информации с датчиков 2 и отображаемой системой контроля 3 выделяет ситуации, существенные с точки зрения принятия решений, и на основании результатов прогноза оценивает степень их опасности. Блок контроля безопасности 5 прогнозирует развитие ситуаций, способствуя упреждению принятия правильных решений до момента появления реальных угроз. Одновременно полученная информация от системы контроля 3 поступает на вход блока оценки степени ситуационной осведомленности пилота 6, выходы которого соединены с блоком анализа обстановки 4 и блоком принятия решений 7, что способствует, во-первых, повышению объективности результатов прогноза и, во-вторых, рациональному распределению функций управления ВС либо посредством автопилота 8, либо благодаря наличию блоков командного интерфейса 9 и системы отображения пилотажной информации 10 посредством пилота 11, что, в конечном счете, позволяет воздействовать на исполнительные механизмы 12. Рабочая база знаний 13 содержит формируемые варианты управлений, которые могут изменяться и уточняться по мере обновления текущей информации. Блок обучения 14 обеспечивает формирование или коррекцию баз знаний, используемых в блоке анализа обстановки 4. Командный интерфейс 9 выполняет взаимодействие пилота 11 с ВС 1, с одной стороны, а, с другой стороны, путем воздействия на ВС 1 и его системы при помощи различных средств и органов управления 12. При этом обеспечивается активная роль пилота 11 в управлении ВС благодаря наличию прямой и обратной его связи с блоком принятия решения 7, что позволяет пилоту при любой ситуации взять руководство полетом в свои руки.
Блок оценки ССО работает следующим образом.
При включении блока запускается начальная процедура, которая предложит ввести IQ и iq пилота, затем сформирует матрицу допустимых значений δij (i=1…К) (j=1…L) и матрицу времени наработки tij(i=1…К) (j=1…L) каждого блока всех систем. Введет для каждой системы время выполнения сенсорной операции βi (i=1…K), время выполнения моторной операции γi (i=1…K), число сенсорных операций Ni(β) и число моторных операций Ni(γ). Определит SOпорог=IQ, определит интенсивность отказов (считаем величиной постоянной) λ=10-5. Сохранение перечисленных величин реализуется, например, с помощью запоминающих устройств вычислительных машин (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук А.А.Куликовского. Том 3, Энергия», 1970, стр.340-354).
После включения устройства начинается постоянная циклическая проверка всех блоков всех систем. Управляет циклом проверки блоков генератор тактовых импульсов с периодом следования Т, скважностью <<1 и с заданным периодом следования импульсов Т.
Блок 5 (фиг.4) и блок 2 (фиг.5) с выхода блока 3 «Системы контроля полетом» «Бортовой интеллектуальной системы управления полетом» (фиг.2) по шине данных получают последовательно блок за блоком данные из уже сформированных матриц времени наработки каждого блока tij (i=1…K) (j=1…L) и допустимых значений каждого блока δij (i=1…K) (j=1…L) и сохраняют полученные данные во внутренней памяти 14j (j=1…L) и 16j (j=1…L), соответственно.
Блоки 4 (фиг.6) и 8 (фиг.7) с выхода блока 3 «Системы контроля полетом» «Бортовой интеллектуальной системы управления полетом» (фиг.2) по шине данных считывают последовательно блок за блоком текущие значения контролируемых параметров sij (i=1…K) (j=1…L) и результат регистрации текущей наработки Δij (i=1…K) (j=1…L) каждого блока i-й системы и сохраняют полученные данные во внутренней памяти 18j (j=1…L) и 20j (j=1…L), соответственно.
Блок 9 с выхода блока 3 «Системы контроля полетом» «Бортовой интеллектуальной системы управления полетом» (фиг.2) по шине данных получает уже сформированные по каждой i-й системе данные времени выполнения сенсорной операции βi, времени выполнения моторной операции γi число сенсорных операций Ni(β) и число моторных операций Ni(γ). Полученные данные сохраняются во внутренней памяти 34, 37, 32, 35, соответственно.
Сформированные данные допустимых значений каждого блока i-й системы δij (i=1…K) (j=1…L) и данные текущих значений контролируемых параметров каждого блока i-й системы sij (i=1…К) (j=1…L) с выходов блоков 2 (фиг.5) и 4 (фиг.6) последовательно блок за блоком подаются на вход блока 3 (фиг.8), где в каждом из L устройств 21j (j=…L) происходит сравнение 2-х входящих величин. Если при этом сравнении δij-sij<0, т.е. контролируемый параметр sij вышел за пределы допустимого, то на выходе соответствующего устройства 21j (j=1…L) (фиг.8), будет сформирована логическая «1», на выходе остальных устройств сохраниться логический «0». Выходы всех 21j (j=1…L) устройств поданы на элемент, реализующий функцию «или» и при появлении на входе этого элемента хотя бы одной логической «1», на выходе этого элемента тоже появится логическая «1», и это говорит о том, что выявлена критическая система (y=i), номер которой фиксируется во внутренней памяти устройства 23. Проверка блоков систем останавливается. Счетчик в блоке 3 (фиг.8) фиксирует j-й блок у-й системы и сохраняет во внутренней памяти количество проверенных блоков Dy, устройство 25, и количество оставшихся не проверенными блоков у-й системы Fy, устройство 24. Если i-я система не выявлена, как критическая, то проверка блоков циклически продолжается.
При выявлении у-й критической системы ее номер сохраняется во внутренней памяти 23 и появление логической «1» на выходе устройства 23 (фиг.8) является стартовым импульсом для начала проверки выявленной у-й критической системы. На входы устройств 26j (j=…L) блока 6 (фиг.9) подаются сигналы, сформированные в блоках 5 и 8, tyj (j=1…L) (фиг.4) и Δyj (j=1…L) (фиг.7). По управляющему импульсу значения времени наработки tyj (j=1…L) и результат регистрации текущей наработки Δyj (j=1…L) всех блоков у-й критической системы поступают в устройства вычисления надежности блоков критической системы pyj=e-λ(t[y,j]+Δ[y,j]) 26j (j=1…L) (фиг.9). С выходов блоков 26j (j=1…L) полученные значения надежности блоков критической системы pyj (j=1…L) поступают на вход устройств вычисления вероятности отказов блоков критической системы qyj=1-pyj 27j (j=1…L) (фиг.9). Полученные значения вероятности отказов блоков критической системы qyj (j=…L) сохраняются во внутренней памяти, устройства 28j (j=1…L).
Вычисления вероятности положительного p+ и отрицательного p- результата проверки каждого блока критической системы, блок 7 (фиг.10), происходит в два этапа. Полученные в блоке 6 (фиг.9) значения вероятности отказов блоков критической системы qyj (j=1…L) поданы на входы устройств вычисления p+=Σqyj (j=1…Fy) и p-=Σqyj (j=1…Dy), устройства 29j (j=1…L) (фиг.10). На первом этапе по управляющему импульсу и по выставленному значению счетчика, определяющему множество проверенных и не проверенных блоков критической системы Dy+Fy=Ly, подведенные ко входу устройств 29j (j=1…L) значения qyj (j=l...L) поступают в те устройства, которые определяют множества Dy и с выходов этих устройств они поступают на сумматор, где значения выбранных устройств складываются и сохраняются во внутренней памяти, устройство 31 (фиг.10). Второй этап. Появление значения р- на устройстве внутренней памяти 31 выдает управляющий импульс на счетчик, который выставляет разрешающие предустановки на те устройства, которые определяют множества Fy и вырабатывает управляющий импульс для подачи входных значений qyj (j=1…L) в выбранные устройства 29j (j=1…L). С выходов этих устройств значения поступают на сумматор, где значения выбранных устройств складываются и сохраняются во внутренней памяти, устройство 30 (фиг.10).
Вычисление общего количества сенсорных и моторных операций и время их выполнения, блок 9 (фиг.11), происходит следующим образом. При выявлении критической системы y=i сформированные данные времени выполнения сенсорной операции βУ, времени выполнения моторной операции γу, число сенсорных операций Ny(β) и число моторных операций Ny(γ) по шине данных введены во внутреннюю память блока 9 34, 37, 32, 35 (фиг.11). По управляющему импульсу данные с устройств 32 и 34 (фиг.11) подаются на блок вычисления Тβ=Ny(β)*βy 33 (фиг.11), а данные с устройств 35 и 37 (фиг.11) подаются на блок вычисления Тγ=Nγ(γ)*γу 36 (фиг.11). Полученные в устройствах 33 и 36 данные поступают на сумматор, где значения складываются и на выходе сумматора получаем значение МУ(Т) - время выполнения общего числа сенсорных и моторных операций, которое сохраняется во внутренней памяти устройства 40 блока 10 (фиг.12). Одновременно с этим в сумматоре блока 9 (фиг.11) происходит суммирование значений общего количества сенсорных и моторных операций у-й критической системы Ny(β) и Ny(γ). Полученное значение ОЕу сохраняется во внутренней памяти устройства 42 блока 10 (фиг.12).
Вычисление информативности у-й критической системы Iу и интенсивность деятельности пилота τу происходит следующим образом. Сохраненные во внутренней памяти блока 7, в устройстве 30 значение p+ и в устройстве 31 значение p- (фиг.10), выставлены на входы устройств вычисления информативности y-й критической системы 38 и 39 блока 10 (фиг.12) и по управляющему импульсу в блоке 38 происходит вычисление значения p+log2p+, а в блоке 39 происходит вычисление значения p-log2p-, с выхода устройств 38 и 39 полученные значения поступают на сумматор, где они складываются и полученное значение информативности у-й критической системы Iу сохраняется в устройстве внутренней памяти 44 блока 11 (фиг.13). Одновременно с этим значения МУ(Т) и ОЕу (фиг.12) сохраненные в устройствах 40 и 42, по управляющему импульсу поступают в устройство 41 (фиг.12) вычисления интенсивности деятельности пилота τу=ОЕу/Му(Т). С выхода устройства 41 (фиг.12) полученное значение ту сохраняется в устройстве 45 блока 11 (фиг.13).
Степень ситуационной осведомленности пилота вычисляется в блоке 11 (фиг.13). В устройстве 41 на старте циклической проверки блоков всех систем сохранен параметр iq пилота. В устройстве 44 и 45 сохранены, соответственно, Iy - информативность у-й критической системы и τу - интенсивность деятельности пилота. По управляющим импульсам в первом умножителе вначале перемножаются iq*Iу. При появлении результата на выходе первого умножителя выдается импульс на работу второго умножителя в котором происходит окончательное вычисление SO=iq*Iy/τy. Полученное в блоке 11 значение SO сохраняется в устройстве 46 блока 12 (фиг.14).
В устройстве 48 блока 12 (фиг.14) на старте циклической проверки блоков всех систем сохранен параметр SOпорог=IQ пилота, введенному при старте работы системы. По управляющему импульсу значения с выходов устройств 46 и 48 поступают в устройство принятия решения в котором происходит сравнение значений SO и SOпорог. Если SO>SOпорог, то управляет пилот, иначе управляет автопилот. С выхода устройства 47 (фиг.14) сигналы пилот и автопилот подаются на вход блока 7 «Принятие решений» бортовой интеллектуальной системы управления полетом (фиг.2).
Устройства, отображенные в функциональной схеме блока Оценки степени ситуационной осведомленности пилота, построены на стандартных схемах, применяемых в радиоэлектронике (см. Справочник по радиоэлектронике в трех томах. Под общей ред. Проф., докт. Техн. Наук. А.А.Куликовского, т.3, «Энергия», 1970.
Таким образом, реализация предлагаемого способа путем расширения функциональных возможностей бортовой интеллектуальной системы управления ВС позволяет разрешить, по словам отца кибернетики Норберта Винера, одну из величайших проблем современности - проблему распределения функций управления, в частности, воздушного судна между пилотом и автопилотом.
Литература
1. Словарь бизнес-терминов. Академик. ру. 2001.
2. Коваленко Г.В., Микинелов А.Л., Чепига В.Е. Летная эксплуатация: учебное пособие для вузов гражданской авиации. – М.: Машиностроение, 2007. - 416 с.
3. Кирилкин B.C. Диагностирование технических систем: учебное пособие для слушателей и курсантов института. - Л.: ВИКИ им. А.Ф.Можайского, 1986. - 237 с.
4. Зюба Т.В., Кирилкин М.В. Принцип диагностирования систем с учетом наработки элементов на отказ // Датчики и системы, №10, 2003. С.5…7.
5. Биргер И.А. Техническая диагностика. - М.: «Машиностроение», 1978. - 240 с.
6. Федунов Б.Е. Интеллектуальные системы пилотируемых ЛА // Бортовые интеллектуальные системы. 4.1. Авиационные системы. Сб. статей. - М.: Радиотехника, 2006. - 104 с.
7. Нейрокомпьютеры в авиации (самолеты )/ Под ред. В.И.Васильева, Б.Г.Ильясова, С.Т.Кусимова. Кн. 14: Учеб. пособие для ВУЗов. - М.: Радиотехника, 2003. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ТРАЕКТОРИИ ВЗЛЕТА И ПРОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА НАД ВЫСОТНЫМ ПРЕПЯТСТВИЕМ | 2022 |
|
RU2798591C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОПОВЕЩЕНИЯ ПИЛОТА О ДИСТАНЦИИ ТОРМОЖЕНИЯ ВОЗДУШНЫХ СУДОВ НА ЭТАПЕ ПОСАДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2781533C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДНОГО ИНДЕКСА ДЛЯ УПРАВЛЕНИЯ ТЯГОЙ ДВИГАТЕЛЯ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509037C1 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| Блок интеллектуальной поддержки | 2020 |
|
RU2770996C1 |
Изобретение относится к летной эксплуатации воздушных судов (ВС) и может быть использовано при разработке автоматизированных систем управления. Способ распределения функций управления ВС заключается в том, что формируют исходные данные, поступают сигналы о состоянии бортовых систем, поступившие сигналы сравнивают с допустимыми значениями. В случае их несоответствия выявляют критическую систему, для которой с учетом наработки блоков вычисляют текущую вероятность безотказной их работы и вероятность отказа. По найденным величинам с учетом специфики функциональной схемы критической системы вычисляют вероятности положительных и отрицательных результатов проверок блоков системы. Согласно стандартным рабочим процедурам контроля и управления критической системой анализируют деятельность пилота. По результатам выполненных операций вычисляют информативность системы и интенсивность деятельности пилота, определяют для пилота коэффициент интеллекта и его пороговое значение. Формируют сигнал, равный степени ситуационной осведомленности пилота, и по результатам его сравнения с сигналом пороговой величины принимают решение о субъекте управления. Предложен также блок оценки степени ситуационной осведомленности пилота в составе бортовой интеллектуальной системы управления ВС, реализованный согласно представленному алгоритму. В результате благодаря дублированию процессов контроля и управления ВС между пилотом и управляющей системой (автопилотом) повышается безопасность полета. 2 н. и 12 з.п. ф-лы, 14 ил.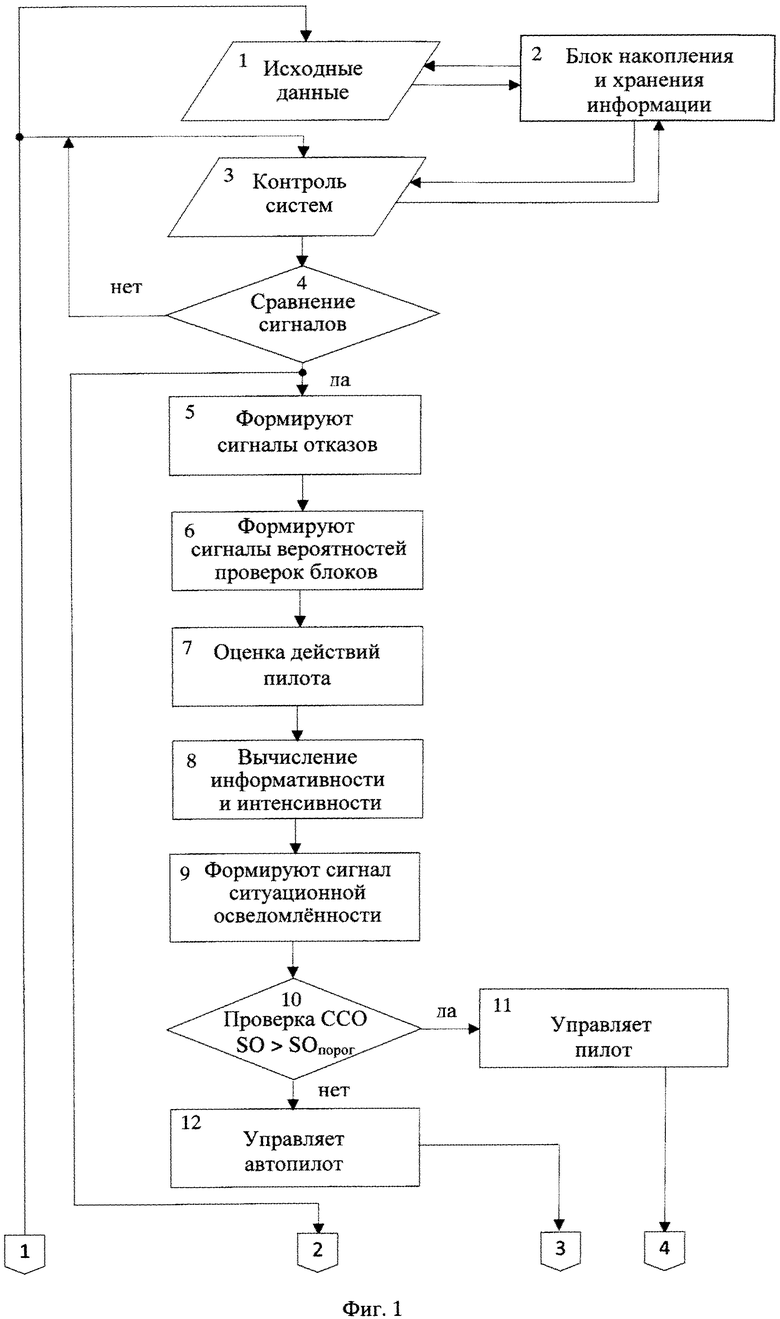
1. Способ распределения функций управления воздушным судном, в частности, между пилотом и управляющей системой, в которой формируют исходные данные, в которую поступают сигналы о состоянии бортовых систем, поступившие сигналы сравнивают с допустимыми значениями, отличающийся тем, что в случае их несоответствия выявляют критическую систему, для которой с учетом наработки блоков вычисляют текущую вероятность безотказной их работы и вероятность отказа, по найденным величинам с учетом специфики функциональной схемы критической системы вычисляют вероятности положительных и отрицательных результатов проверок блоков системы, согласно стандартным рабочим процедурам контроля и управления критической системой анализируют деятельность пилота, по результатам выполненных операций вычисляют информативность системы и интенсивность деятельности пилота, определяют для пилота коэффициент интеллекта и его пороговое значение, формируют сигнал, равный степени ситуационной осведомленности пилота, и по результатам его сравнения с сигналом пороговой величины принимают решение о субъекте управления.
2. Способ по п.1, отличающийся тем, что сигнал степени ситуационной осведомленности формируют согласно зависимости:

где SOi - степень ситуационной осведомленности пилота в критической ситуации, созданной i-й бортовой системой;
iqϕ - коэффициент интеллекта ϕ-го пилота, где ϕ=1 (КВС), 2 (второй пилот) (рабочий коэффициент интеллекта фиксируется при отработке пилотом на тренажере одной из особых ситуаций);
ΣIi - суммарная информативность диагностирования всех j-х блоков i-й системы, создавшей критическую ситуацию;
τi - интенсивность алгоритма деятельности ϕ-го пилота в процессе слежения, контроля, принятия и реализации решения по i-й системе, создавшей особую ситуацию (член экипажа, осуществляющий пилотирование, участвует в качестве консультанта).
3. Способ по п.1, отличающийся тем, что величину коэффициента интеллекта замеряют путем тестирования пилота в процессе отработки особой ситуации на тренажере.
4. Способ по п.1, отличающийся тем, что пороговую величину степени ситуационной осведомленности задают равной коэффициенту интеллекта, полученному по результатам тестирования в нормальных условиях.
5. Способ по любому из пп.1-4, отличающийся тем, что при значении степени ситуационной осведомленности менее пороговой управление ВС осуществляют автопилотом, если более пороговой - пилотом.
6. Система для реализации способа по любому из пп.1-5, содержащая ВС, датчики, блоки системы контроля полета, анализа обстановки, контроля безопасности, принятия решений, рабочей базы знаний, обучения, командного интерфейса, системы отображения информации, исполнительных механизмов, автопилота, отличающаяся тем, что она содержит блок оценки степени ситуационной осведомленности пилота, соединенный своим входом со вторым выходом блока системы контроля полета, первым выходом блок оценки соединен со вторым входом блока анализа обстановки, вторым и третьим выходами блок оценки соединен соответственно с четвертым и пятым входами блока принятия решений.
7. Система по п.6, отличающаяся тем, что блок оценки степени ситуационной осведомленности пилота содержит блок регистрации времени наработки каждого блока систем ВС, блок регистрации допустимых значений блоков ВС, блок формирования текущих значений контролируемых параметров, блок формирования результатов регистрации текущей наработки блоков ВС, блок определения выхода контролируемых параметров за допустимые значения, блок вычисления надежности и вероятности отказов блоков критической системы, блок вычисления вероятности положительного и отрицательного результата проверки блоков критической системы, блок вычисления общего количества сенсорных и моторных операций и времени их выполнения, блок вычисления информативности критической системы и интенсивности деятельности пилота, блок вычисления степени ситуационной осведомленности пилота и блок принятия решения, соединенный своими выходами соответственно с четвертым и пятым входами блока принятия решений системы, а входом соединен с выходом блока вычисления степени ситуационной осведомленности, соединенного своим входом с выходами соответственно блока вычисления количества сенсорных и моторных операций и времени их выполнения и блока вычисления вероятности положительного и отрицательного результата проверки, соединенного своими входами с выходами блока вычисления надежности и вероятности отказа блоков бортовых систем и блока определения выхода контролируемых параметров за допустимые значения, причем вход блока вычисления надежности и вероятности отказа блоков бортовых систем соединен с выходами блока регистрации времени предыдущей наработки и блока регистрации текущей наработки блоков бортовых систем, а блок определения выхода контролируемых параметров за допустимые значения входами соединен с выходами блока регистрации допустимых значений блоков бортовых систем и блока формирования текущих значений контролируемых параметров.
8. Система по п.7, отличающаяся тем, что блок определения выхода контролируемых параметров за допустимые значения содержит устройства сравнения, количество которых соответствует количеству контролируемых блоков бортовых систем ВС.
9. Система по п.7, отличающаяся тем, что блок вычисления надежности и вероятности отказов содержит устройства вычисления надежности блоков критической системы, на вход которых подаются значения времени наработки до момента включения устройства и текущего времени наработки, а также устройства вычисления вероятности отказов.
10. Система по п.7, отличающаяся тем, что блок вычисления вероятности положительного и отрицательного результата проверки блоков содержит L устройств вычисления вероятности, счетчик, сумматор и два устройства хранения полученных значений вероятности положительного и отрицательного результата проверки.
11. Система по п.7, отличающаяся тем, что блок вычисления общего количества сенсорных и моторных операций и времени их выполнения содержит блок вычисления общего количества сенсорных и моторных операций и времени их выполнения содержит четыре устройства хранения исходной информации, сумматор вычисления количества оперативных единиц, два устройства вычисления времени выполнения сенсорных и моторных операций, сумматор для вычисления времени выполнения операций.
12. Система по п.7, отличающаяся тем, что блок вычисления информативности критической системы и интенсивности деятельности пилота содержит устройства вычисления информативности критической системы, на входы которых подают сигналы вероятности положительного и отрицательного результата проверок, и устройство вычисления интенсивности деятельности пилота, на входы которого подают сигналы общего числа сенсорных и моторных операций критической системы и времени их выполнения.
13. Система по п.7, отличающаяся тем, что блок вычисления степени ситуационной осведомленности пилота содержит три устройства хранения исходной информации и два умножителя вычисления степени ситуационной осведомленности пилота.
14. Система по п.7, отличающаяся тем, что блок принятия решения содержит два блока хранения исходной информации и устройство формирования сигнала передачи управления либо пилоту, либо автопилоту.
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ С ДИНАМИЧЕСКИ МОДИФИЦИРУЕМЫМ КОНТУРОМ | 1994 |
|
RU2109316C1 |
| Шлифовально-полировальный агрегат | 1948 |
|
SU89257A1 |
| СПОСОБ И УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ РАБОТЫ СИСТЕМЫ ОПЕРАТОР - ОБЪЕКТ | 1996 |
|
RU2114456C1 |
| МНОГОЦЕЛЕВАЯ ОБУЧАЕМАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ГРУППОВОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ, ОСНАЩЕННАЯ МЕХАНИЗМАМИ ПОДДЕРЖКИ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРОВ | 2007 |
|
RU2373561C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

