Изобретение относится к области авиационной техники, а именно к комплексам навигации, управления и наведения летательных аппаратов (ЛА).
Наиболее близкие аналоги приведены в книге [1] на стр.6-16, 391-507, а также в книге [2] на стр.354-357. В [1] представлен навигационный комплекс бортового оборудования ЛА, включающий в себя измерительные датчики и системы: инерциальные навигационные системы (ИНС), бесплатформенные курсовертикали (БКВ), радиосистемы ближней навигации (РСБН), доплеровские измерители скорости и сноса (ДИСС), спутниковые навигационные системы (СНС), радиовысотомеры (РВ), воздушные (аэрометрические) датчики и системы (ВДС), вычислительную систему комплекса, обеспечивающую обработку измерительной информации и формирование сигналов управления и информации для экипажа, систему отображения информации (СОИ) и устройства управления и ввода информации (УВИ). В [2] представлен прицельно-навигационный комплекс, в который, кроме указанных систем, входят различные обзорно-прицельные средства (ОПС) локации пространства, визирования ориентиров и слежения за подвижными и неподвижными объектами (астровизирные средства, тепло-, оптико-, радио- визирные средства). Вычислительная система при этом содержит блок ввода-вывода и управления информационным обменом, обеспечивающий информационный обмен между компонентами вычислительной системы и комплекса в целом, блок формирования параметров состояния ЛА, обеспечивающий расчет основных параметров состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА - см. [1], стр.7), блоки обработки информации, поступающей от разных навигационных и прицельных систем. Комплекс обеспечивает обработку измерительной информации для определения параметров движения ЛА и визируемых объектов (целей), осуществления информационного взаимодействия с экипажем, управления состоянием ЛА и средств поражения целей.
Основными недостатками наиболее близких аналогов являются:
1) большая загруженность вычислителя из-за большого количества решаемых задач и требуемой высокой частоты обновления информации;
2) недостаточно высокая надежность комплекса (например, при выходе из строя вычислителя комплекс теряет работоспособность, в случае сбоя в отдельных блоках вычислителя возможно пропадание информации и невыполнение задачи);
3) ограниченное информационно-управляющее поле кабины, затрудняющее быстрый анализ экипажем обстановки, вследствие чего увеличивается время принятия решения и снижается качество выполнения задач ЛА;
4) недостаточное качество представления экипажу картографической информации, снижающее эффективность самолетовождения и распознавания целей;
5) ограниченное качество распознавания образов целей с помощью ОПС, что уменьшает возможности применения средств поражения;
6) недостаточно высокая точность определения скорости и координат с помощью радионавигационных систем (ДИСС, РСБН), а также курса с помощью ИНС, что снижает качество и эффективность выполнения задач навигации и применения средств поражения по наземным целям;
7) недостаточно высокая надежность решения навигационных задач, базирующаяся на обработке информации ИНС - при выходе ИНС из строя требуемое качество решения навигационных задач теряется;
8) низкая эффективность организации групповых действий из-за отсутствия точной информации о параметрах группы;
9) ограниченные возможности по применению средств поражения различной номенклатуры из-за ограниченности информационной поддержки прицеливания и наведения.
Задачей изобретения является расширение функциональных возможностей прицельно-навигационного комплекса (ПрНК) за счет устранения указанных недостатков при сохранении положительных качеств прототипов, вследствие чего повышается эффективность боевого применения многофункциональных ЛА, снабженных ПрНК.
Достигается указанный результат тем, что прицельно-навигационный комплекс, содержащий взаимосоединенные входами-выходами по магистрали информационного обмена (МИО) измерительные системы: ИНС, ВДС, РСБН, ДИСС, БКВ, СНС, РВ, оптико-локационную систему (ОЛС), устройства управления и ввода информации (УВИ), систему отображения информации, интегрированную вычислительную среду (ИВС) комплекса, в составе которой содержатся взаимосоединенные своими входами и выходами посредством магистралей вычислительного информационного обмена (МВИО) блоки: ввода-вывода и управления информационным обменом, другие входы/выходы которых являются входами/выходами ИВС комплекса, формирования параметров состояния ЛА, автономной обработки информации ДИСС, автономной обработки информации СНС, автономной обработки информации РСБН, автономной обработки информации РВ, автономной обработки информации ОЛС, дополнительно снабжен резервной системой ИНС, системой определения взаимных координат, дополнительно снабжен входящими в состав СОИ многофункциональными индикаторами МФИ, снабжен входящими в состав УВИ дополнительными пультом управления и кнюппельным устройством, дополнительно снабжен входящей в состав ИВС бортовой графической станцией БГС, дополнительно снабжен магистралью телекодовой связи, к которой подключены вторые входы/выходы ОЛС и СОИ, входящими в состав ИВС двумя идентичными цифровыми вычислительными системами ЦВС, каждая из которых содержит цифровую вычислительную машину управления ЦВМ-У, цифровую вычислительную машину навигации ЦВМ-Н, цифровую вычислительную машину прицеливания ЦВМ-П, причем в состав БГС дополнительно входят: блок формирования карты местности, цифровая карта рельефа, блок корреляционно-экстремальной обработки информации, в каждую ЦВМ-П дополнительно входят: база данных целей, блок формирования координат цели, блок формирования координат ЛА, блок формирования параметров сброса для неуправляемых средств поражения, блок формирования параметров управления для управляемых средств поражения, блок формирования параметров командного наведения средств поражения, в каждую ЦВМ-Н дополнительно входят: блок формирования модели навигационного пространства, блок формирования параметров вынесенной точки, блок формирования параметров группы, блок формирования и обработки невязок скорости, блок формирования и обработки невязок координат, блок формирования невязок координат, блок формирования корректирующих поправок для ДИСС, блок формирования корректирующих поправок для РСБН, блок помехозащитного фильтра, блок селектора каналов, дублирующий блок формирования параметров состояния ЛА, причем каждый из них дополнительно снабжен блоками: формирования невязок по скорости между ИНС и ДИСС, формирования невязок по скорости между ИНС и СНС, фильтрации, формирования корректирующих поправок по углам и скорости, формирования невязок по координатам между ИНС и СНС, формирования невязок по координатам между ИНС и ОПС, формирования невязок по координатам между ИНС и РСБН, формирования невязок по координатам между ИНС и корреляционно-экстремальной системой, формирования выходных параметров.
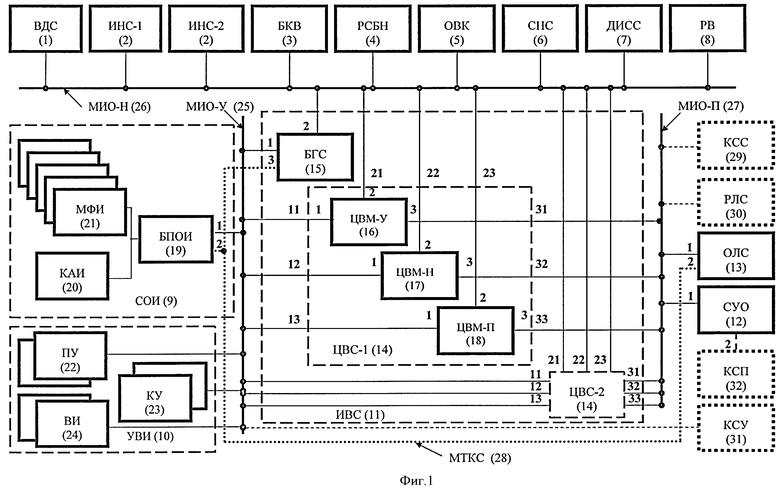
На фиг.1 представлена блок-схема прицельно-навигационного комплекса (ПрНК), содержащего:
1 - воздушные датчики и системы ВДС;
2 - две инерциальные навигационные системы: ИНС-1 и ИНС-2;
3 - бесплатформенную курсовертикаль БКВ;
4 - радиосистему ближней навигации РСБН;
5 - средства определения взаимных координат ОВК;
6 - спутниковую навигационную систему СНС;
7 - доплеровский измеритель скорости и сноса ДИСС;
8 - радиовысотомер РВ;
9 - систему отображения информации СОИ;
10 - устройства управления и ввода информации УВИ;
11 - интегрированную вычислительную среду ИВС;
12 - систему управления оружием СУО;
13 - оптико-локационную систему ОЛС;
14 - две цифровые вычислительные системы: ЦВС-1 и ЦВС-2;
15 - бортовую графическую станцию БГС;
25 - магистраль информационного обмена управления МИО-У;
26 - магистраль информационного обмена навигации МИО-Н;
27 - магистраль информационного обмена прицеливания МИО-П;
28 - магистраль телекодовой связи МТКС.
На фиг.1 показаны также устройства, не входящие в состав ПрНК:
29 - комплекс средств связи КСС;
30 - радиолокационная система РЛС;
31 - комплексная система управления КСУ;
32 - комплект средств поражения КСП.
СОИ 9 содержит устройства:
19 - блок преобразования и обработки информации БПОИ, входы/выходы которого являются входами/выходами СОИ;
20 - коллиматорный авиационный индикатор КАИ;
21 - n1 многофункциональных индикаторов МФИ.
УВИ 10 содержит устройства:
22 - n пультов управления ПУ;
23 - n кнюппельных устройств КУ;
24 - m устройств ввода информации ВИ,
причем входы/выходы блоков ПУ, КУ, ВИ являются входами/выходами УВИ.
ИВС является высокопроизводительным вычислительным ядром комплекса, обеспечивающим решение задач обработки изображений, задач управления комплексом и ЛА, навигационных задач, задач прицеливания и наведения средств поражения, и структурно может быть выполнена, например, в виде БГС и ЦВС. ЦВС (14) представляет собой часть высокопроизводительной ИВС, обеспечивающая решение задач управления комплексом и ЛА, навигационных задач, задач прицеливания и наведения средств поражения. Структурно ЦВС может быть выполнена, например, в виде совокупности изделий 4-го поколения типа (бортовой цифровой вычислительной машины БЦВМ-486, или других, более мощных вычислителей. На фиг.1 каждая ЦВС в качестве примера содержит:
16 - цифровую вычислительную машину управления ЦВМ-У;
17 - цифровую вычислительную машину навигации ЦВМ-Н;
18 - цифровую вычислительную машину прицеливания ЦВМ-П,
при этом 1-й, 2-й, 3-й входы/выходы ЦВМ-У, 1-й, 2-й, 3-й входы/выходы ЦВМ-Н, 1-й, 2-й, 3-й входы/выходы ЦВМ-П являются соответственно 11-м, 21-м, 31-м, 12-м, 22-м, 32-м, 13-м, 23-м, 33-м входом/выходом ЦВС.
В состав ЦВМ-Н (17) входят следующие блоки, показанные на фиг.2:
1 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
2 - магистраль вычислительного информационного обмена МВИО;
3 - два блока формирования параметров состояния ФПС-1 и ФПС-2;
4 - блок формирования модели навигационного пространства ФМНП;
5 - блок формирования параметров вынесенной точки ФПВТ;
6 - блок формирования параметров группы ФПГ;
7 - блок автономной обработки информации ДИСС - АОИ ДИСС;
8 - блок автономной обработки информации СНС - АОИ СНС;
9 - блок автономной обработки информации РСБН - АОИ РСБН;
10 - селектор каналов СК;
11 - блок формирования и обработки невязок по скорости между ДИСС и СНС - ФОНС;
12 - блок формирования корректирующих поправок для ДИСС - ФКПД;
13 - блок формирования невязок по координатам между СНС и ОПС - ФНК;
14 - помехозащитный фильтр ПЗФ;
15 - блок формирования и обработки невязок по координатам между РСБН и СНС - ФОНК;
16 - блок формирования корректирующих поправок для РСБН - ФКПР.
В состав ФПС входят блоки:
17 - блок автономной обработки информации ИНС - АОИ ИНС;
18 - блок формирования невязок по скорости между ИНС и ДИСС - ФНСД;
19 - блок формирования невязок по скорости между ИНС и СНС - ФНСС;
20 - блок фильтрации БФ;
21 - блок формирования корректирующих поправок по углам и скорости для ИНС - ФКПУС;
22 - блок формирования невязок по координатам между ИНС и СНС - ФНКС;
23 - блок формирования невязок по координатам между ИНС и ОПС - ФНКО;
24 - блок формирования невязок по координатам между ИНС и РСБН - ФНКР;
25 - блок формирования невязок по координатам между ИНС и корреляционно-экстремальной навигационной системой (КЭНС) - ФНКК;
26 - блок формирования выходных параметров состояния ЛА - ФВП.
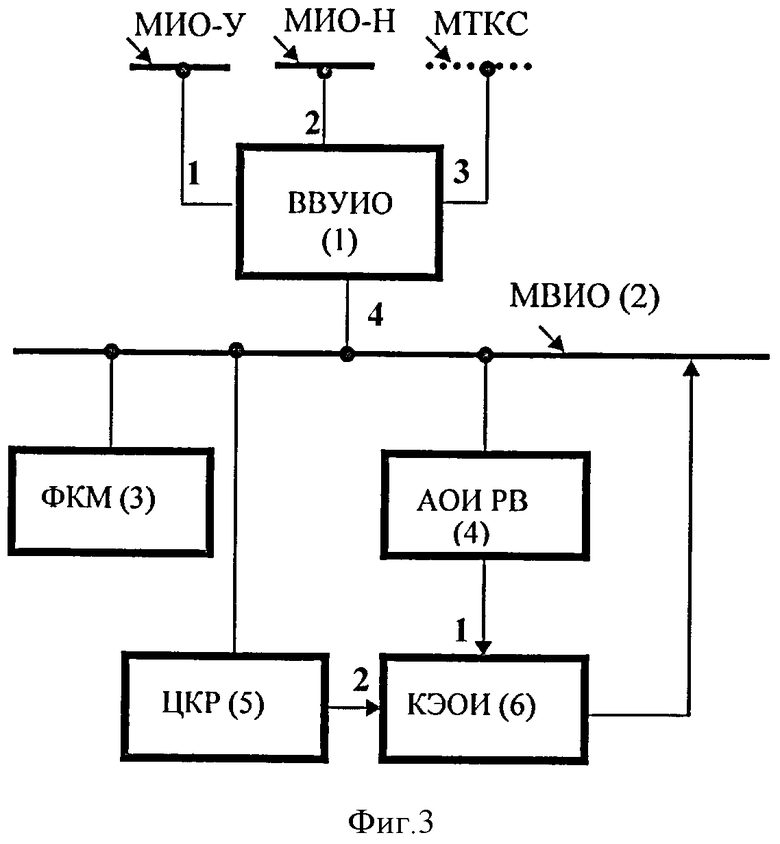
В состав БГС (15) входят следующие блоки, показанные на фиг.3:
1 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
2 - магистраль вычислительного информационного обмена МВИО;
3 - блок формирования карты местности ФКМ;
4 - блок автономной обработки информации РВ - АОИ РВ;
5 - блок формирования цифровой карты рельефа ЦКР;
6 - блок корреляционно-экстремальной обработки информации КЭОИ.
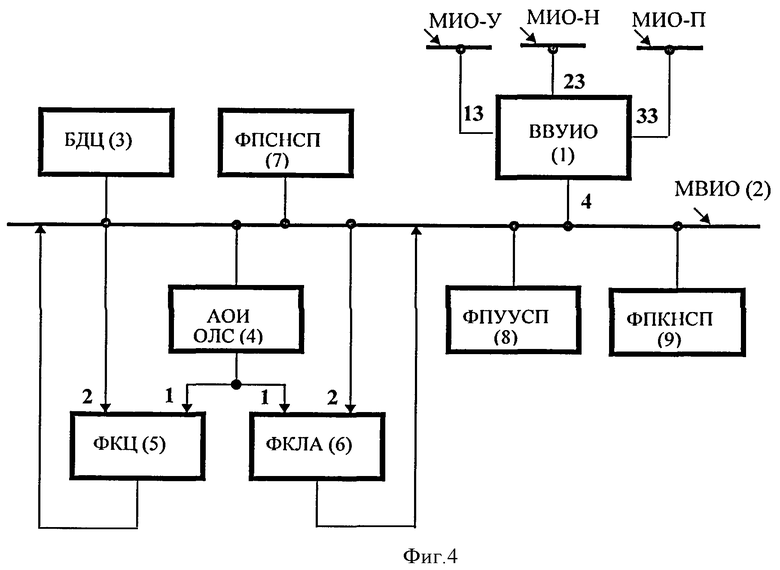
В состав ЦВМ-П (18) входят следующие блоки, показанные на фиг.4:
1 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
2 - магистраль вычислительного информационного обмена МВИО;
3 - база данных целей БДЦ;
4 - блок автономной обработки информации ОЛС - АОИ ОЛС;
5 - блок формирования координат цели ФКЦ;
6 - блок формирования координат ЛА - ФКЛА;
7 - блок формирования параметров сброса для неуправляемых средств поражения ФПСНСП;
8 - блок формирования параметров управления для управляемых средств поражения ФПУУСП;
9 - блок формирования параметров командного наведения средств поражения ФПКНСП.
Информационная взаимосвязь систем ПрНК осуществляется по МИО-У (25), МИО-Н (26), МИО-П (27) (на чертежах обозначены полужирными сплошными линиями), а также по МТКС (28) (на чертежах обозначены круглым пунктиром).
Информационный обмен между входами/выходами вычислительно-логических блоков, входящих в состав БГС (15), ЦВМ-У (16), ЦВМ-Н (17), ЦВМ-П (18) (фиг.1), осуществляется по МВИО (2) (на чертежах 2, 3, 4 обозначена полужирной сплошной линией).
Блок УВИ (10), а также КСУ (31) подключены своими входами/выходами к МИО-У (26), к которой подключены также первые входы/выходы СУО (9), БГС (15), ЦВМ-У (16), ЦВМ-Н (17), ЦВМ-П (18) (фиг.1).
Блоки ВДС (1), ИНС-1 (2), ИНС-2 (2), БКВ (3), РСБН (4), ОВК (5), СНС (6), ДИСС (7), РВ (8) подключены своими входами/выходами к МИО-Н (26), к которой подключены также вторые входы/выходы БГС (15), ЦВМ-У (16), ЦВМ-Н (17), ЦВМ-П (18) (фиг.1).
Первые входы/выходы блоков СУО (12), ОЛС (13) подключены к МИО-П (27), к которой подключены также входы/выходы блоков КСС (29), РЛС (30) и третьи входы/выходы ЦВМ-У (16), ЦВМ-Н (17), ЦВМ-П (18) (фиг.1). Второй вход/выход блока СУО (12) подключен к входу/выходу КСП (32) (фиг.1). Второй вход/выход блока ОЛС (13) подключен к МКТС (28), к которой также подключены вторые входы/выходы блоков СОИ (9) и БГС (15) (фиг.1).
Блоки (1)÷(8), (13), (30) (фиг.1) представляют собой известные датчики и системы бортового оборудования ЛА, описанные в литературе, например [1], стр.8-16, 171-243, 316-317, 325-327, 374-385; [3], стр.292-295. РСБН (4) в режиме посадки формирует параметры отклонения от посадочной траектории (глиссады), а в режиме навигации измеряет азимут радиомаяка и дальность до него, с помощью которых при известных координатах радиомаяка решается задача определения координат объекта. Система ОВК (5) измеряет расстояния между ЛА и другими объектами группы и скорости их сближения, а также формирует углы визирования ЛА группы. Принцип действия блока ОВК (5) аналогичен принципу действия блоков РСБН (4), СНС (6) и РЛС (30) (фиг.1). ДИСС (7) измеряет доплеровские сдвиги частот излучаемых радиосигналов, с помощью которых решается задача определения вектора скорости объекта; СНС (6) измеряет временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта, РВ (8) измеряет фазово-временной сдвиг излучаемого радиосигнала, зависящий от высоты полета ЛА над подстилающей поверхностью. В состав блока ОВК (5) входят радиотехнические средства визирования других ЛА из состава группы, измеряющие дальности до них и углы их визирования, а также скорости сближения/удаления ЛА. В состав блока ОЛС (13) входят оптические средства визирования ориентиров (целей), измеряющие дальности до ориентиров и углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат объекта, а при известных координатах объекта - задача определения координат целей. В состав блока РЛС (30) входят радиолокационные средства визирования ориентиров (целей), измеряющие дальности до ориентиров и углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат объекта, а при известных координатах объекта - задача определения координат целей. ИНС (2) решают задачу автономного счисления скорости, координат и угловой ориентации объекта на основе измеряемых с помощью акселерометров и гироскопов ускорений и угловых скоростей (или углов ориентации) объекта. БКВ (3) определяет скорость и угловую ориентации объекта на основе измерительной информации гироскопов и акселерометров. В состав блока ВДС (5) входит система воздушных сигналов СВС, измеряющая статические, динамические, полные давления воздуха, с помощью которых решаются задачи определения высоты и скорости объекта относительно атмосферы, датчики аэродинамических углов атаки и скольжения, измеряющие направления обтекающих воздушных потоков.
Блоки МФИ (21), КАИ (20), СОИ (9), БПОИ (19), ПУ (22), КУ (23), ВИ (24), УВИ (10) представляют собой совокупность бортовых индикационно-управляющих устройств объекта, описанных в литературе, например [3]. Блок СУО (12) представляет собой систему управления оружием, описанную, например, в [3] на стр.293.
Блоки МИО-У (25), МИО-Н (26), МИО-П (27) представляют собой известные (описанные, например, в книге [4], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блоки КСС (29) и КСУ (31) (фиг.1) не входят в состав ПрНК и представляют собой комплексы средств связи и управления ЛА, взаимодействующие с ПрНК и описанные, например, в [3], стр.292-295. Блок КСП (32) (фиг.1) не входит в состав ПрНК и представляет собой набор штатных средств поражения, описанный, например, в [3], стр.295-302.
1-м, 2-м, 3-м входами/выходами блоков БГС (15), ЦВМ-У (16), ЦВМ-Н (17), ЦВМ-П (18) (фиг.1) являются входы/выходы соответствующих I блоков ВВУИО (1) (фиг.2-4), четвертые входы/выходы блоков ВВУИО подключены к соответствующим внутренним магистралям вычислительного информационного обмена МВИО (2) (фиг.2-4).
Блок ВВУИО (1) (фиг.2-4) представляет собой известное устройство (описанное, например, в книге [4], стр.16-24, 386-406, 436-440) сопряжения вычислителя с линиями связи, осуществляющее прием, контроль и выдачу информации.
На фиг.2 показаны связи блоков, входящих в состав ЦВМ-Н. К МВИО (2) подключены своими входами/выходами следующие блоки: ФМНП (4), ФПВТ (5), ФПГ (6) (фиг.2). Кроме того, к МВИО (2) подключены 1-е, 5-е, 7-е входы блоков ФПС-1 (3) и ФПС-2 (3), первые входы блоков АОИДИСС (7), АОИСНС (8), АОИРСБН (9), второй вход блока ФНК (13) и выход блока СК (10) (фиг.2). Второй вход блока АОИДИСС (7) подключен к выходу блока ФКПД (12), вход блока ФКПД (12) подключен к выходу блока ФОНС (11) (фиг.2). Первый вход блока ФОНС (11) подключен к выходу блока АОИДИСС (7), подключенному также ко вторым входам блоков ФПС-1 (3) и ФПС-2 (3), второй вход блока ФОНС (11) - к первому выходу блока АОИСНС (8), подключенному также к третьим входам блоков ФПС-1 (3) и ФПС-2 (3) (фиг.2). Второй вход блока АОИСНС (8) подключен к выходу блока ПЗФ (14), вход которого подключен к выходу блока ФНК (13), первый вход которого подключен ко второму выходу блока АОИСНС (8), подключенному также к четвертым входам блоков ФПС-1 (3) и ФПС-2 (3) и второму входу блока ФОНК (15) (фиг.2). Второй вход блока АОИРСБН (9) подключен к выходу блока ФКПР (16), вход которого подключен к выходу блока ФОНК (15), первый вход которого подключен к выходу блока АОИРСБН (9), подключенному также к шестым входам блоков ФПС-1 (3) и ФПС-2 (3) (фиг.2). Первый вход блока СК (10) подключен к выходу блока ФПС-1 (3), а второй вход блока СК (10) - к выходу блока ФПС-2 (3) (фиг.2). Первый вход блока ФПС (3) является первым входом блока АОИИНС (17), второй вход - вторым входом блока ФНСД (18), третий вход - вторым входом блока ФНСС (19), четвертый вход - вторым входом блока ФНКС (22), пятый вход - вторым входом блока ФНКО (23), шестой вход - вторым входом блока ФНКР (24), седьмой вход - вторым входом блока ФНКК (25) (фиг.2). Выход блока ФВП (26) является выходом блока ФПС (3) (фиг.2). Второй вход блока АОИИНС (17) подключен к выходу блока ФКПУС (21), вход которого подключен к выходу блока БФ (20), первый вход которого подключен к выходу блока ФНСС (19), а второй вход - к выходу блока ФНСД (18) (фиг.2). Первые входы блоков ФНСД (18) и ФНСС (19) подключены к первому выходу блока АОИИНС (17) (фиг.2). Второй выход блока АОИИНС (17) подключен к первым входам блоков ФНКС (22), ФНКО (23), ФНКР (24), ФНКК (25) (фиг.2). Выходы блоков ФНКС (22), ФНКО (23), ФНКР (24), ФНКК (25) подключены соответственно к 1-му, 2-му, 3-му, 4-му входам блока ФВП (26) (фиг.2).
Блоки ФПС-1 (3), ФПС-2 (3), ФМНП (4), ФПВТ (5), ФПГ (6), АОИДИСС (7), АОИСНС (8), АОИРСБН (9), СК (10), ФОНС (11), ФКПД (12), ФНК (13), ПЗФ (14), ФОНК (15), ФКПР (16), АОИИНС (17), ФНСД (18), ФНСС (19), БФ (20), ФКПУС (21), ФНКС (22), ФНКО (23), ФНКР (24), ФНКК (25), ФВП (26) выполнены, например, в виде однопроцессорных вычислителей ([4], стр.31).
На фиг.3 показаны связи блоков, входящих в состав БГС. К МВИО (2) подключены: вход/выход блока ФКМ (3), входы блоков АОИРВ (4) и ЦКР (5), а также выход блока КЭОИ (6) (фиг.3). Выходы блоков АОИРВ (4) и ЦКР (5) подключены соответственно к первому и второму входам блока КЭОИ (6) (фиг.3).
Блоки ФКМ (3), АОИРВ (4), КЭОИ (6) выполнены, например, в виде однопроцессорных вычислителей ([4], стр.31). Блок ЦКР (5) выполнен, например, на постоянном запоминающем устройстве ПЗУ ([4], стр.30).
На фиг.4 показаны связи блоков, входящих в состав ЦВМ-П. К МВИО (2) подключены: входы/выходы блоков БДЦ (3), ФПСНСП (7), ФПУУСП (8), ФПКНСП (9), вход блока АОИОЛС (4), второй вход блока ФКЦ (5), второй вход блока ФКЛА (6) и выходы блоков ФКЦ (5) и ФКЛА (6) (фиг.4). Выход блока АОИОЛС подключен к первым входам блоков ФКЛА (6) и ФКЦ (5) (фиг.4). Блоки ФПСНСП (7), ФПУУСП (8), ФПКНСП (9), АОИОЛС (4), ФКЦ(5), ФКЛА (6) выполнены, например, в виде однопроцессорных вычислителей ([4], стр.31). Блок БДЦ (3) выполнен, например, на постоянном запоминающем устройстве ПЗУ ([4], стр.30).
Блоки, входящие в состав каждой ЦВМ-Н (17) (фиг.1), обеспечивают расчет параметров навигационного пространства (кривизны поверхности положения, гравитационного поля, состояния атмосферы), параметров состояния ЛА и его отдельных точек (координаты, скорости, ускорения, углы ориентации), параметров состояния группы ЛА (углы визирования ЛА, дальности до них и скорости сближения) на основе решения соответствующих уравнений, связывающих эти параметры с измеряемыми величинами, поступающими в ЦВМ-Н от измерительных устройств комплекса по магистрали МИО-Н (26 (фиг.1), а также от ЦВМ-П по магистрали МИО-П (27) (см., например, книгу [1], стр.7-8, 117-158, 171-283).
Блоки, входящие в состав каждой ЦВМ-П (18) (фиг.1), обеспечивают расчет координат целей и ЛА, формирование параметров сброса, управления и командного наведения для различных средств поражения на основе решения соответствующих уравнений, связывающих эти параметры с измеряемыми величинами, поступающими в ЦВМ-П от ОЛС (13), РЛС (30), измеряющих относительные (взаимные) координаты целей и ЛА, по магистрали МИО-П (26 (фиг.1), от ЦВМ-Н по магистрали МИО-Н (26) (фиг.1), а также вводимыми с помощью устройств ВИ (24) (фиг.1) и хранящимися в ЦВМ-П данными о параметрах целей (см., например, книгу [2].
Блоки, входящие в состав БГС (15) (фиг.1), обеспечивают формирование цветной карты местности для индикации экипажу тактической, пилотажной и прицельной информации в наиболее удобном виде, формирование координат ЛА на основе корреляционно-экстремальной обработки измерительной информации о высоте, поступающей по МИО-Н (26) (фиг.1), и цифровой карты рельефа, вводимой с помощью устройств ВИ (24) (фиг.1) и хранящихся в БГС.
Блоки, входящие в состав каждой ЦВМ-У (16) (фиг.1), обеспечивают обработку управляющих сигналов, поступающих от УВИ (10), КСУ (31) (фиг.1), формирование управляющих команд для ПрНК и управляющей информации для КСУ (31), а также индикационной информации для СОИ (9) (фиг.1).
ПрНК работает следующим образом.
Измеряемая информация о параметрах движения ЛА Ji (i=ИНС-1, ИНС-2, ВДС, БКВ, РСБН, СНС, ДИСС, ОВК, РВ) из блоков (1)÷(8) поступает через магистраль МИО-Н (26) на вторые входы/выходы БГС (15), каждой ЦВМ-У (16), каждой ЦВМ-Н (17), каждой ЦВМ-П (18) (фиг.1). Измеряемая информация об относительных координатах цели Ui (i=ОЛС, РЛС) из блоков (13), (30) поступает через магистраль МИО-П (27) и магистраль МТКС (28) на третьи входы/выходы БГС (15), каждой ЦВМ-У (16), каждой ЦВМ-Н (17), каждой ЦВМ-П (18) (фиг.1). Априорная информация Ki (i=ИНС, ВДС, РСБН, СНС, ДИСС, РЗП, ОПС) о параметрах геофизических полей (в частности, полей рельефа земной поверхности и объектового состава (РЗП), выбранной модели фигуры Земли, отражающих свойствах подстилающей поверхности, радиомаяках, созвездиях навигационных спутников систем ГЛОНАСС и GPS, ориентирах), а также о параметрах целей посредством устройств ПУ (22) и ВИ (24) поступает в БГС (15) и в каждую ЦВС (14), в частности, в каждую ЦВМ-П (18) и в каждую ЦВМ-Н (17) (фиг.1). Эта информация далее хранится в ИВС (11) в блоках ЦКР (5) (фиг.3), ФМНП (4) (фиг.2), БДЦ (3) (фиг.4). Оттуда она посредством соответствующих МВИО поступает на входы различных вычислительных блоков ИВС.
С целью повышения производительности ЦВС (14) (фиг.1) в ее состав введены три ЦВМ, работающих параллельно, причем каждая из них обеспечивает решение своих задач: ЦВМ-У - задач управления и индикации, ЦВМ-Н - навигационных задач, ЦВМ-П - задач прицеливания и применения средств поражения. На входы каждой ЦВС (14) (фиг.1) поступает одинаковая информация, обработка ее в каждой ЦВС осуществляется тоже по одинаковым алгоритмам, чем обеспечивается полное резервирование цифровой вычислительной системы и повышение надежности комплекса. Каждая из трех ЦВМ, входящих в состав ЦВС-1, имеет своего дублера в составе ЦВС-2, так что при отказе любой из ЦВМ комплекс сохраняет полную работоспособность. Для повышения оперативности управления экипажем комплексом и ЛА в целом, а также для увеличения возможностей одновременной индикации большого количества информации в состав УВИ (10) введены n ПУ (22) и КУ (23), где n - количество членов экипажа, а в состав СОИ (9) введены n1 МФИ (21) (фиг.1). При этом на каждый из МФИ (21) из БПОИ (19) поступает одинаковый набор информационных кадров, а члены экипажа имеют возможность независимо выбирать для каждого МФИ (21) любой из кадров (фиг.1). Это обеспечивает параллельную работу членов экипажа с комплексом и повышает оперативность принятия решений и их качество. С этой же целью в состав БГС (15) (фиг.1) введен блок ФКМ (3) (фиг.3), обеспечивающий формирование цветной карты местности для индикации экипажу тактической, пилотажной и прицельной информации в наиболее удобном виде.
Телекодовая информация со второго выхода ОЛС (13) (фиг.1) посредством МТКС (28) (фиг.1) поступает на второй вход СОИ (9) (фиг.1), которая обеспечивает формирование на одном из МФИ (21) (фиг.1) телевизионного изображения цели, что значительно облегчает работу экипажа и повышает качество решения прицельных задач.
Измерительная и априорная информация, поступающая на вход ЦВМ-Н (17) (фиг.1), посредством блока ВВУИО (1) (фиг.2) поступает в МВИО (2) (фиг.2). В блоках АОИДИСС (7), АОИСНС (8), АОИРСБН (9) (фиг.2), АОИИНС (17) производится обработка информации соответствующих систем в соответствии с общим уравнением (см., например [1], стр.171-178, 189-195, 216-224, 225-229, 236-240, 316-327, 374-385):

где Ni - многомерный вектор определяемых параметров, включающий координаты, скорость, ускорение, углы ориентации ЛА;
Ji - измерительная информация, скорректированная на величину поправок;
Ki - априорная информация, используемая в алгоритмах;
ℜi - алгоритм (оператор) обработки информации датчиков и систем;
i - индекс, принимающий значения соответственно: ДИСС, СНС, РСБН, ИНС.
В блоке ФОНС (11) (фиг.2) вычитанием из вектора корректируемой информации NДИСС вектора корректирующей информации NСНС строится невязка ZД-С между ними, которая обрабатывается, например, методом нестационарной вычислительно-устойчивой фильтрации (см. [1], стр.40-45; [5], стр.96-108) или методом наименьших квадратов (см. [6], стр.923-927), в результате чего для каждого k-того момента времени формируется оценка вектора Х погрешностей ДИСС в виде:

где  - прогнозируемое значение вектора Х в k-тый момент времени;
- прогнозируемое значение вектора Х в k-тый момент времени;
 - оценка значения вектора Х в k-тый момент времени.
- оценка значения вектора Х в k-тый момент времени.
Эта оценка поступает на вход блока ФКПД (12) (фиг.2), в котором определяются корректирующие поправки для ДИСС, поступающие на второй вход блока АОИДИСС (7) (фиг.2).
В блоке ФОНК (15) (фиг.2) вычитанием из вектора корректируемой информации
NРСБН вектора корректирующей информации NСНС строится невязка ZР-С между ними, которая обрабатывается аналогично тому, как невязка ZД-С. Сформированная при этом оценка вектора Х погрешностей РСБН поступает в блок ФКПР (16) (фиг.2), в котором определяются корректирующие поправки для РСБН, поступающие на второй вход блока АОИРСБН (9) (фиг.2).
Введение в состав ПрНК блоков ФОНС (11), ФКПД (12), ФОНК (15), ФКПР (16) (фиг.2) обеспечивает эффективный контроль информации ДИСС и РСБН по более точному устройству - СНС, а также адаптацию этих измерителей к условиям полета. Это приводит к существенному улучшению качества этой информации и, соответственно, улучшает качество решения навигационных задач ПрНК.
В блоке ФНК (13) (фиг.2) вычитанием из вектора контролируемой информации NСНС вектора контрольной информации NОПС, поступающей в ЦВМ-Н из ЦВМ-П посредством соответствующих блоков ВВУИО и магистралей МИО-Н и МИО-П, строится невязка ZО-С между ними, которая поступает на вход блока ПЗФ (14) (фиг.2). Там эта невязка обрабатывается аналогично тому, как невязка ZД-С. Сформированная при этом оценка вектора Х рассогласования информации СНС и ОПС сопоставляется с контрольной пороговой величиной и при превышении ее формируется сигнал недостоверности информации СНС, который поступает на второй вход блока АОИСНС (8) (фиг.2) и для соответствующего учета при обработке информации СНС.
Введение в состав ПрНК блоков ФНК (13) и ПЗФ (14) обеспечивает эффективный контроль достоверности информации спутникового канала, что повышает надежность и качество решения комплексом основных навигационных и прицельных задач.
В состав каждой ЦВМ-Н входят два блока ФПС (3) (фиг.2), обеспечивающие формирование параметров ЛА в пространстве. Каждый из этих блоков является основным каналом навигационной информации комплекса, а основу его составляет обработка информации ИНС. Соответственно, блок ФПС-1 (3) обрабатывает информацию ИНС-1, а блок ФПС-2 (3) - системы ИНС-2 (фиг.2). Выходы обоих блоков подключены к блоку СК (10) (фиг.2), в котором на основе анализа сигналов исправности и достоверности, поступающих от ИНС и формируемых в результате комплексной обработки информации в ФПС (3), осуществляется выбор ведущей ИНС и, соответственно, ведущего блока ФПС, информация которого посредством МВИО (2) и ВВУИО (1) (фиг.2) передается потребителям - другим системам и блокам комплекса. На первый вход блока ФПС (3) (фиг.2) поступает информация JИНС от соответствующей ИНС. Блок имеет два выхода - по скорости и по координатам. Информация о скорости ЛА с первого выхода поступает на первые входы блоков ФНСД (18) и ФНСС (19) (фиг.2), на вторые выходы которых поступает информация о скорости ЛА с выходов блоков АОИДИСС (7) и АОИСНС (8) (фиг.2) соответственно. В блоках ФНСД (18) и ФНСС (19) (фиг.2) вычитанием из вектора корректируемой скоростной информации Nv ИНС вектора корректирующей скоростной информации
Nv ДИСС и Nv СНС соответственно строятся невязки Zv И-Д и Zv И-С. Эти невязки поступают на вход блока фильтрации БФ (20) (фиг.2), где обрабатываются методом нестационарной вычислительно-устойчивой фильтрации (см. [1], стр.40-45; [5], стр.96-108), в результате чего для каждого k-того момента времени формируется оценка вектора Х погрешностей ИНС. Эта оценка поступает на вход блока ФКПУС (21) (фиг.2), в котором осуществляется формирование корректирующих поправок для скоростной и угловой (в том числе курсовой) информации ИНС, которые с выхода блока ФКПУС (21) поступают на второй вход блока АОИИНС (17) для коррекции информации ИНС. Со второго выхода блока АОИИНС (17) (фиг.2) информация о координатах ЛА (NR ИНС) поступает на первые входы блоков ФНКС (22), ФНКР (24), ФНКО (23), ФНКК (25) (фиг.2), на вторые входы которых поступает аналогичная информация с выходов блока АОИСНС (8), АОИРСБН (9), ВВУИО (1) (фиг.2). При этом с выхода ВВУИО (1) (фиг.2) посредством МВИО (2) (фиг.2) поступает информация о координатах ЛА, полученная в БГС (15) (фиг.1) и в ЦВМ-П (18) (фиг.1) по результатам обработки информации ОПС и корреляционно-экстремальной обработки информации РВ (8) (фиг.1) и ЦКР (5) (фиг.3) соответственно. В блоках ФНКС (22), ФНКР (24), ФНКО (23), ФНКК (25) (фиг.2) формируются невязки ZR И-С, ZR И-Р ZR И-О, ZR И-К между различными значениями координат и осуществляется их обработка - аналогично тому, как это делается для невязки ZД-С. С выходов блоков ФНКС (22), ФНКР (24), ФНКО (23), ФНКК (25) (фиг.2) информация поступает на входы блока ФВП (26) (фиг.2), в котором осуществляется окончательное формирование выходных параметров состояния ЛА в пространстве. Выход блока ФВП (26) является выходом блока ФПС (3) (фиг.2).
Введение в состав ПрНК блоков ФНСД (18), ФНСС (19), БФ (20), ФКПУС (21), ФНКС (22), ФНКО (23), ФНКР (24), ФНКК (25) (фиг.2) обеспечивает максимально возможную точность решения основных задач комплекса во всех режимах работы и условиях полета. Введение в состав ПрНК двух систем ИНС (2) (фиг.1), а также в состав каждой ЦВМ-Н (17) (фиг.1) - двух блоков ФПС (3) (фиг.2) и блока СК (10) (фиг.2) обеспечивает высокую надежность и непрерывность решения основных задач комплекса во всех режимах работы и условиях полета.
В блоке ФМНП (4) (фиг.2) осуществляется формирование параметров KpМНП модели навигационного пространства: расчет параметров гравитационного поля Земли, расчет параметров кривизны поверхностей положения и модели фигуры Земли с помощью формул вида

где ℑ - алгоритм (оператор) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами (описанными, например, в книге [7], стр.142-162, 45-47) относительно величины K;
векторы N и J выбираются из числа доступных величин Ni и Ji (i=ИНС, ВДС, РСБН, СНС, ОПС, КЭНС - корреляционно-экстремальная навигационная система, построенная в БГС на основе измерений высоты и цифровой карты рельефа).
Введение в состав ПрНК блока ФМНП (4) (фиг.2) обеспечивает формирование единой системы отсчета для всех измерительных устройств комплекса, что в значительной мере уменьшает вычислительные затраты, необходимые для формирования систем отсчета, снижает нагрузку на ЦВМ, и в то же время существенно улучшает точность решения навигационных и прицельных задач.
В блоке ФПГ (6) (фиг.2) осуществляется формирование параметров группы ЛА. Информация JОВК о дальностях, углах визирования и скоростях сближения ЛА группы, измеренная системой ОВК (5) посредством МИО-Н (26) поступает в ЦВМ-Н (17) (фиг.1). Здесь она посредством МВИО (2) поступает на вход блока ФПГ (6) (фиг.2), в котором производится приведение этой информации к единой системе отсчета и формирование параметров взаимных движений (координат, скоростей) ЛА группы - векторов ΔNp/q (p=1,…L; q=1,…L; p≠q, L - количество ЛА в группе). После этого в блоке ФПГ (6) (фиг.2) производится синтез информации о многомерных векторах состояния остальных ЛА группы. Для этого в блок ФПН (6) из МВИО (2) поступает информация о векторе N и решаются уравнения вида

где Np/q ((p=1,…L; q=1,…L; p≠q) - вектор состояния p-го ЛА, синтезированный в ИУК q-го ЛА. Синтезированные величины Np/q поступают через МВИО (2), ВВУИО (1) на выход ЦВМ-Н и, соответственно, ИВС (11) (фиг.1). Наличие такой информации на борту ЛА позволяет экипажу более точно выдерживать параметры строя при выполнении полетного задания, которое благодаря этому может содержать более сложные задачи по преодолению противовоздушной обороны и поражению целей. Таким образом, введение в состав ПрНК блоков ОВК (5) (фиг.1) и ФПГ (6) (фиг.2) приводит к повышению эффективности применения ЛА, оснащенных ПрНК.
В блоке ФПВТ (5) (фиг.2) осуществляется формирование вектора NBT параметров движения вынесенной точки ЛА - места установки антенны РЛС. В состав вектора NBT в общем случае входят координаты, линейная и угловая скорость, ускорение, углы ориентации. Для определения параметров вектора в состав ПрНК введен блок БКВ (3) (фиг.1), обеспечивающий измерение угловой скорости и ускорения, а также формирование на основе этой информации значений линейной скорости и углов ориентации (см., например, [1]). Эта информация посредством МИО-Н (26) (фиг.1) вводится в ЦВМ-Н (17) (фиг.1), где посредством МВИО (2) (фиг.2) попадает на вход блока ФПВТ (5) (фиг.2), в котором эти данные корректируются с помощью информации о векторе N, поступающей с выхода блока СК (10) (фиг.2) через МВИО (2) (фиг.2). Коррекция осуществляется аналогично тому, как это описано выше для блоков ФПС (3), ФОНС (11), ФКПД (12), ФОНК (15), ФКПР (16) (фиг.2). Сформированный по информации БКВ (3) (фиг.1) и скорректированный по информации СК (10) (фиг.2) вектор NВТ поступает в магистраль МВИО (2) (фиг.2) и, далее, на выход ЦВМ-Н (17) (фиг.1) для потребителей - блока РЛС (30) (фиг.1) и СОИ (9) (фиг.1).
Введение в состав ПрНК блока БКВ (3) (фиг.1) и блока ФПВТ (5) (фиг.2) обеспечивает формирование точных параметров движения вынесенной точки ЛА - места установки РЛС, что обеспечивает высокую степень разрешения при распознавании целей и тем самым придает новое, более высокое, качество решению задачи прицеливания и применения средств поражения, существенно повышая эффективность работы ЛА, оснащенного ПрНК.
В составе БГС (15) (фиг.1) имеется блок АОИРВ (4) (фиг.3), на вход которого посредством ВВУИО (1) и МВИО (2) (фиг.3) поступает информация о высоте ЛА, измеренная блоком РВ (8) (фиг.1). Эта информация после обработки, предусматривающей приведение к требуемой системе отсчета, учет поправок и проверку достоверности, поступает на первый вход блока КЭОИ (6) (фиг.3), на второй вход которого поступает информация о высоте рельефа в зоне полета. В блоке КЭОИ (6) (фиг.3) осуществляется корреляционно-экстремальная обработка входной информации и осуществляется поиск траектории и места ЛА, наилучшим образом коррелирующихся с получаемыми измерениями. Рассчитанные значения координат ЛА с выхода блока КЭОИ (6) (фиг.3) поступают в магистраль МВИО (2) (фиг.3) и далее на выход БГС (15) (фиг.1) для остальных потребителей - СОИ (9) и ЦВС (14) (фиг.1). Введение в состав ПрНК блоков ЦКР (5) и КЭОИ (6) (фиг.3) обеспечивает высокоточное определение координат ЛА, что имеет большое значение для повышения надежности решения задач комплексом, а также обеспечивает возможность выполнения полетов на малой высоте, что повышает живучесть ЛА и эффективность его применения.
Измеренная информация об относительных координатах цели Ui (i=ОЛС, РЛС) поступает на вход блока АОИОЛС (4) (фиг.4), в котором осуществляется ее автономная обработка, предусматривающая приведение к требуемой системе отсчета, учет корректирующих поправок и контроль достоверности. С выхода блока АОИОЛС (4) информация об относительных координатах цели U поступает на первые входы блоков ФКЦ (5) и ФКЛА (6) (фиг.4). На второй вход блока ФКЛА (6) из БДЦ (3) посредством МВИО (2) (фиг.4) поступает хранящаяся там информация KОПС о параметрах цели. В блоке ФКЛА (6) (фиг.4) по поступающей входной информации осуществляется расчет параметров движения ЛА NОПС с помощью формул вида

(см., например, [1]). Рассчитанные значения координат ЛА с выхода блока ФКЛА (6) (фиг.4) поступают в магистраль МВИО (2) (фиг.4) и далее на выход ЦВМ-П (18) (фиг.1) для остальных потребителей - СОИ (9), ЦВМ-Н (17) (фиг.1). Введение в состав ПрНК блоков БДЦ (3) и ФКЛА (6) (фиг.4) обеспечивает высокоточное определение координат ЛА, что имеет большое значение для повышения надежности решения задач комплексом, а также обеспечивает возможность контроля достоверности и качества решения навигационных задач в ЦВМ-Н (17) (фиг.1).
На второй вход блока ФКЦ (5) из МВИО (2) (фиг.4) поступает информация о векторе N параметров движения ЛА, сформированная в ЦВМ-Н (17) (фиг.1). В блоке ФКЦ (5) (фиг.4) на основе входной информации осуществляется расчет вектора КОПС параметров (координат) визируемой цели пли ориентира. Расчет осуществляется с помощью формул вида:

где ℑ - алгоритм (оператор) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами (описанными, например, в книге [7], стр. 142-162, 45-47) относительно величины K.
Полученный вектор КОПС с выхода блока ФКЦ (5) (фиг.4) поступает в магистраль МВИО (2) (фиг.4), а оттуда - на выход ЦВМ-П (18) (фиг.1) для выдачи потребителям - СОИ (9) (для индикации экипажу), СУО (12) (для учета в системе управления оружием), КСС (29) (для передачи данных об обнаруженной цели другим ЛА группы или на наземный пункт наведения и управления) (фиг.1). Кроме того, вектор КОПС из магистрали МВИО (2) поступает в БДЦ (3) для последующего учета и хранения, и в блоки ФПСНСП (7), ФПУУСП (8), ФПКНСП (9) для решения соответствующих задач. Введение в состав ПрНК блока ФКЦ (5) (фиг.4) обеспечивает высокоточное определение параметров (координат) оперативно обнаруженных целей и ориентиров, что позволяет повысить качество решения задач навигации и самолетовождения, а также повысить эффективность применения средств поражения.
К МВИО (2) (фиг.4) подключены блоки ФПСНСП (7), ФПУУСП (8), ФПКНСП (9), осуществляющие формирование соответствующих параметров для подготовки и наведения на цель средств поражения различного типа: неуправляемых, управляемых, командного 1 наведения соответственно. Блок ФПСНСП (7) на основе поступающей посредством МВИО (2) (фиг.4) информации о координатах целей и ЛА путем решения уравнений динамики полета неуправляемых средств поражения осуществляет расчет времени и точки их сброса. Блок ФПУУСП (8) на основе поступающей посредством МВИО (2) (фиг.4) информации о координатах и скорости целей и ЛА осуществляет расчет 1 положения и угловой скорости линии визирования цели для обеспечения быстрого ее захвата средствами автосопровождения управляемых средств поражения. Блок ФПКНСП (9) на основе поступающей посредством МВИО (2) (фиг.4) информации о координатах и скорости целей и ЛА осуществляет расчет положения и угловой скорости линии визирования цели для обеспечения ее захвата средствами командного наведения (телевизионного наведения или «подсветки» цели для полуактивных головок самонаведения). Выходная информация блоков ФПСНСП (7), ФПУУСП (8), ФПКНСП (9) посредством МВИО (2) (фиг.4) поступает на выход ЦВМ-П (18) (фиг.1) для выдачи потребителям: СОИ (9), СУО (12), ОЛС (13) (фиг.1). СОИ (9) обеспечивает индикацию этих данных экипажу, СУО (12) в зависимости от выбранного экипажем средства поражения осуществляет на основе информации ЦВС (14) формирование управляющих команд для КСП (32), ОЛС (13) осуществляет управление входящими в его состав лазерными устройствами «подсвета» цели. Введение в состав ПрНК блоков ФПСНСП (7), ФПУУСП (8), ФПКНСП (9) обеспечивает применение максимально возможной номенклатуры средств поражения, существенно повышая эффективность работы ЛА, оснащенного ПрНК.
Таким образом, на примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей ПрНК и, как следствие, повышение эффективности применения оснащаемых им многофункциональных летательных аппаратов.
ЛИТЕРАТУРА
1. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991.
2. Гришутин В.Г. Лекции по авиационным прицельным системам стрельбы. - Киев: КВВАИУ, 1980. - 492 с.
3. Фомин А.В. Су-27. История истребителя. - М.: РА «Интервестник», 2000.
4. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981.
5. Ривкин C.C., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем, - Л.: Судостроение, 1976.
6. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, ГРФМЛ, 1980.
7. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПЕРАТИВНЫХ ЦЕЛЕЙ | 2008 |
|
RU2383468C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |

Изобретение относится к авиационной технике и предназначено для использования при реализации бортового комплекса навигации, управления и наведения многофункциональных маневренных летательных аппаратов (ЛА). В состав комплекса входят взаимосоединенные посредством магистралей информационного обмена две инерциальные навигационные системы (ИНС), радиосистема ближней навигации (РСБН), доплеровский измеритель скорости и сноса (ДИСС), спутниковая навигационная система, радиовысотомер, бесплатформенная курсовертикаль, оптико-локационная система (ОЛС), система определения взаимных координат ЛА в группе, система управления оружием, устройства управления и ввода информации (УВИ), система отображения информации (СОИ), интегрированная вычислительная среда комплекса. В составе последней содержатся бортовая графическая станция (БГС) и две идентичные цифровые вычислительные системы (ЦВС), каждая из которых содержит цифровую вычислительную машину управления, цифровую вычислительную машину навигации, цифровую вычислительную машину прицеливания. В состав СОИ введены дополнительные полностью взаимозаменяемые многофункциональные индикаторы, основные устройства ввода информации и управления в составе УВИ продублированы для каждого члена экипажа. Между ОЛС и СОИ введена дополнительная телекодовая связь. Дополнительные навигационные каналы построены на основе РСБН, ДИСС и корреляционно-экстремальной навигационной системы. В БГС осуществляется формирование цветной карты местности для индикации экипажу. В состав ЦВС также введены блоки, осуществляющие формирование параметров для подготовки и наведения на цель средств поражения. Расширенные функциональные возможности комплекса повышают эффективность применения многофункциональных ЛА. 4 ил.
Прицельно-навигационный комплекс оборудования многофункционального самолета, содержащий взаимосоединенные входами-выходами по магистралям информационного обмена (МИО) инерциальную навигационную систему (ИНС), радиосистему ближней навигации (РСБН), доплеровский измеритель скорости и сноса (ДИСС), спутниковую навигационную систему (СНС), радиовысотомер (РВ), бесплатформенную курсовертикаль (БКВ), оптико-локационную систему (ОЛС), систему управления оружием (СУО), устройства управления и ввода информации (УВИ), систему отображения информации (СОИ), интегрированную вычислительную среду комплекса (ИВС), в составе которой содержатся взаимосоединенные своими входами и выходами посредством магистралей вычислительного информационного обмена (МВИО) блоки: ввода-вывода и управления информационным обменом, другие входы/выходы которых являются входами/выходами ИВС, формирования параметров состояния (ФПС), автономной обработки информации ДИСС, автономной обработки информации СНС, автономной обработки информации РСБН, автономной обработки информации РВ, автономной обработки информации ОЛС, отличающийся тем, что он дополнительно снабжен подключенными своими входами/выходами к магистралям информационного обмена: резервной системой ИНС, системой определения взаимных координат, входящей в состав ИВС бортовой графической станцией (БГС), входящими в состав ИВС двумя идентичными цифровыми вычислительными системами (ЦВС), каждая из которых содержит цифровую вычислительную машину управления, цифровую вычислительную машину навигации (ЦВМ-Н), цифровую вычислительную машину прицеливания (ЦВМ-П), дополнительно снабжен магистралью телекодовой связи, к которой подключены вторые входы/выходы ОЛС и СОИ, дополнительно снабжен входящими в состав СОИ многофункциональными индикаторами (МФИ) и входящими в состав УВИ дополнительными пультом управления и кнюппельным устройством, причем в состав БГС дополнительно входят: блок формирования карты местности (ФКМ), цифровая карта рельефа (ЦКР), блок корреляционно-экстремальной обработки информации (КЭОИ), при этом первый вход КЭОИ подключен к выходу блока автономной обработки информации РВ, второй вход КЭОИ подключен к выходу ЦКР, выход блока КЭОИ, вход блока ЦКР и вход/выход блока ФКМ подключены к МВИО БГС, в каждую ЦВМ-П дополнительно входят подключенные своими входами/выходами к МВИО ЦВМ-П: база данных целей, блок формирования параметров сброса для неуправляемых средств поражения, блок формирования параметров управления для управляемых средств поражения, блок формирования параметров командного наведения средств поражения, а также в состав ЦВМ-П дополнительно входят блок формирования координат цели и блок формирования координат ЛА, выходы и вторые входы которых подключены к МВИО ЦВМ-П, а первые входы - к выходу блока автономной обработки информации ОЛС, в каждую ЦВМ-Н дополнительно входят блоки: формирования модели навигационного пространства (ФМНП), формирования параметров вынесенной точки (ФПВТ), формирования параметров группы (ФПГ), формирования и обработки невязок скорости (ФОНС), формирования и обработки невязок координат (ФОНК), формирования невязок координат (ФНК), формирования корректирующих поправок для ДИСС (ФКПД), формирования корректирующих поправок для РСБН (ФКПР), помехозащитный фильтр (ПЗФ), селектор каналов (СК), дублирующий блок ФПС, причем каждый из блоков ФПС дополнительно снабжен блоками: формирования невязок по скорости между ИНС и ДИСС (ФНСД), формирования невязок по скорости между ИНС и СНС (ФНСС), фильтрации (БФ), формирования корректирующих поправок по углам и скорости (ФКПУС), формирования невязок по координатам между ИНС и СНС (ФНКС), формирования невязок по координатам между ИНС и ОПС (ФНКО), формирования невязок по координатам между ИНС и РСБН (ФНКР), формирования невязок по координатам между ИНС и корреляционно-экстремальной системой (ФНКК), формирования выходных параметров (ФВП), при этом к МВИО ЦВМ-Н подключены входы/выходы блоков ФМНП, ФПВТ, ФПГ, первые, пятые, седьмые входы обоих блоков ФПС, первые входы блоков автономной обработки информации ДИСС, СНС, РСБН, второй вход блока ФНК и выход блока СК, причем второй вход блока автономной обработки информации ДИСС подключен к выходу блока ФКПД, вход блока ФКПД подключен к выходу блока ФОНС, первый вход блока ФОНС подключен к выходу блока автономной обработки информации ДИСС, подключенного также ко вторым входам обоих блоков ФПС, второй вход блока ФОНС подключен к первому выходу блока автономной обработки информации СНС, подключенного также к третьим входам обоих блоков ФПС, второй вход блока автономной обработки информации СНС подключен к выходу блока ПЗФ, вход которого подключен к выходу блока ФНК, первый вход которого подключен ко второму выходу блока автономной обработки информации СНС, подключенного также к четвертым входам обоих блоков ФПС и второму входу блока ФОНК, второй вход блока автономной обработки информации РСБН подключен к выходу блока ФКПР, вход которого подключен к выходу блока ФОНК, первый вход которого подключен к выходу блока автономной обработки информации РСБН, подключенного также к шестым входам обоих блоков ФПС, первый вход блока СК подключен к выходу первого блока ФПС, второй вход блока СК подключен к выходу второго блока ФПС, причем первый вход каждого блока ФПС является первым входом блока автономной обработки информации ИНС, второй вход - вторым входом блока ФНСД, третий вход - вторым входом блока ФНСС, четвертый вход - вторым входом блока ФНКС, пятый вход - вторым входом блока ФНКО, шестой вход - вторым входом блока ФНКР, седьмой вход - вторым входом блока ФНКК, а выход блока ФВП является выходом блока ФПС, причем второй вход блока автономной обработки информации ИНС подключен к выходу блока ФКПУС, вход которого подключен к выходу блока БФ, первый вход которого подключен к выходу блока ФНСС, а второй вход - к выходу блока ФНСД, первые входы блоков ФНСД и ФНСС подключены к первому выходу блока автономной обработки информации ИНС, второй выход которого подключен к первым входам блоков ФНКС, ФНКО, ФНКР, ФНКК, выходы которых подключены соответственно к первому, второму, третьему, четвертому входам блока ФВП.
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА АВИАНОСНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ | 2005 |
|
RU2276328C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2129696C1 |

