Изобретение относится к способам навигации подводных объектов (подводных лодок, обитаемых и необитаемых подводных аппаратов), конкретно к способам их позиционирования.
Одним из основных направлений позиционирования подводных объектов (ПО) является использование гидроакустических маяков (ГМ). Известен целый ряд способов позиционирования ПО с использованием ГМ: способ длинной базы, короткой базы, ультракороткой базы, способ одномаяковой навигации и др. [1-6]. Достоинствами этих способов является скрытность и, как правило, высокая точность позиционирования ПО. К их недостаткам относятся малый радиус действия (до 10 км).
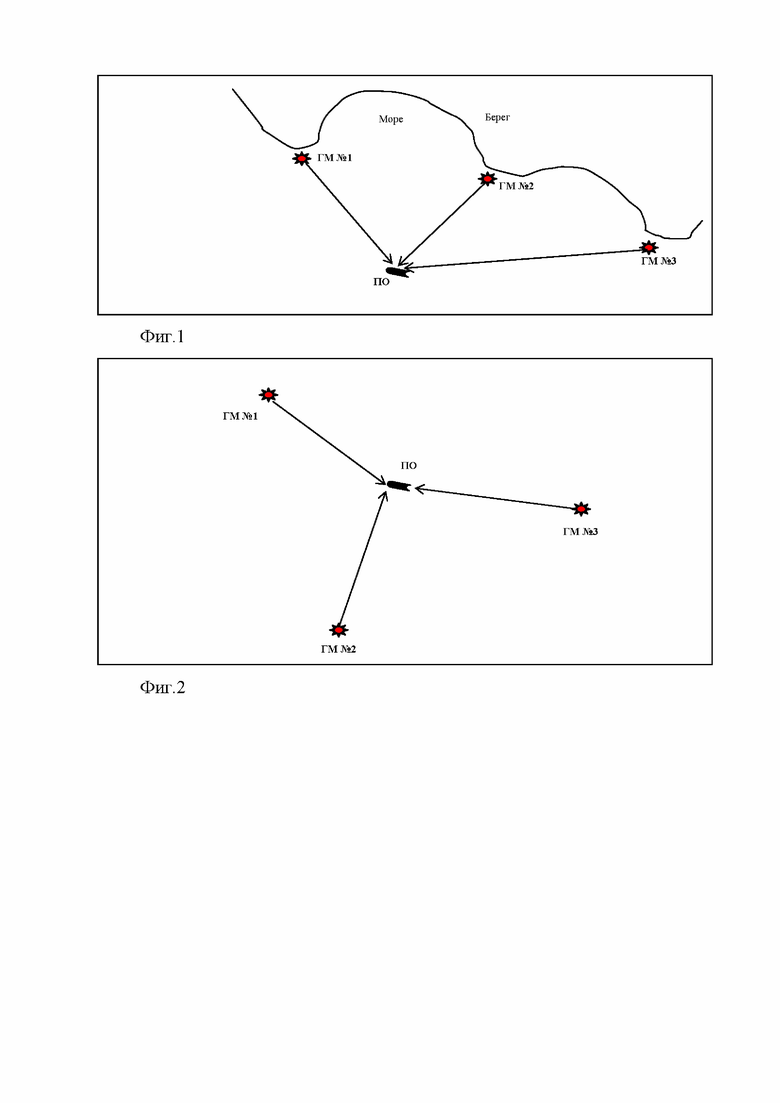
Известен способ позиционирования ПО [7], выбранный в качестве прототипа, включающий:
- установку в морской среде за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала, как минимум, двух стационарных ГМ, периодически излучающих гидроакустические сигналы на частоте ниже 10 кГц и синхронизированных системой единого времени между собой и с акустическим приемником, расположенном на ПО;
- периодическое излучение всеми ГМ сложных гидроакустических сигналов, содержащих в закодированном виде информацию об условном номере ГМ, излучившего гидроакустический сигнал, и моменте времени излучения;
- прием и декодирование каждого излучённого гидроакустического сигнала гидроакустическим приемником ПО с фиксацией времени обнаружения гидроакустического сигнала;
- с использованием времён излучения и приёма гидроакустических сигналов ГМ вычисление в бортовом устройстве вычисления координат времени распространения до ПО гидроакустического сигнала каждого ГМ;
- периодически:
o определение координат ПО с использованием сигналов спутниковой навигационной либо радионавигационной системы;
o с использованием полученных координат ПО и известных координат ГМ вычисление текущих расстояний между каждым ГМ и ПО;
o с использованием вычисленных текущих расстояний и времён распространения гидроакустического сигнала вычисление и запоминание текущей скорости распространения гидроакустического сигнала в воде между каждым ГМ и ПО;
- вычисление текущей дистанции до каждого ГМ как произведение времени распространения до ПО гидроакустического сигнала ГМ на хранящуюся в памяти бортового устройства вычисления координат последнюю по времени определения скорость распространения гидроакустического сигнала между ГМ и ПО;
- определение текущих координат ПО с использованием вычисленных дистанций до каждого ГМ и координат каждого ГМ, хранящихся в памяти бортового устройства вычисления координат.
Способ-прототип проиллюстрирован на фиг.1.
Достоинством описанного способа-прототипа является возможность практически непрерывного скрытного (с редким всплытием на поверхность) высокоточного позиционирования всех подводных объектов, находящихся в районе площадью до 100 тыс. км2.
Недостатком описанного способа-прототипа является необходимость установки в прибрежной зоне и обслуживания ГМ, что не всегда возможно, например, в случае, если это побережье чужого государства, либо на побережье отсутствует необходимая инфраструктура для обеспечения ГМ электроэнергией и техническим обслуживанием, либо если район плавания ПО находится на большом удалении от ближайшего побережья.
Решаемая техническая проблема – совершенствование способов позиционирования подводных объектов.
Достигаемый технический результат – расширение зоны высокоточного позиционирования подводных объектов.
Указанный технический результат достигается тем, что, в отличие от способа-прототипа, ГМ устанавливаются не стационарно в прибрежной зоне, а на надводных судах, находящихся в районе плавания ПО. Текущие координаты каждого ГМ определяются по сигналам спутниковой либо радионавигационной системы и путём кодирования закладываются в сигнал, излучаемый ГМ.
В результате заявляемый способ включает (фиг.2):
- установку ГМ, как минимум, на двух судах, находящихся в районе плавания ПО (новый признак изобретения);
- периодическое определение текущего места каждого судна, на котором размещен ГМ, по сигналам спутниковой либо радионавигационной системы;
- периодическое излучение каждым ГМ сложных гидроакустических сигналов на частоте ниже 10 кГц, содержащих в закодированном виде информацию об условном номере ГМ, излучившего гидроакустический сигнал, моменте времени излучения и текущих координатах судна;
- прием каждого излучённого гидроакустического сигнала гидроакустическим приемником ПО, синхронизированным системой единого времени с ГМ, с фиксацией времени обнаружения гидроакустического сигнала;
- декодирование каждого принятого сигнала с извлечением из него номера ГМ, излучившего гидроакустический сигнал, момента времени излучения и текущих координат ГМ;
- с использованием времён излучения и приёма гидроакустических сигналов ГМ вычисление в бортовом устройстве вычисления координат времени распространения до ПО гидроакустического сигнала каждого ГМ;
- периодически:
o определение координат ПО с использованием сигналов спутниковой либо радио- навигационной системы;
o с использованием полученных координат ПО и известных координат ГМ вычисление текущих расстояний между каждым ГМ и ПО;
o с использованием вычисленных текущих расстояний и времён распространения гидроакустического сигнала вычисление и запоминание текущей скорости распространения гидроакустического сигнала между каждым ГМ и ПО;
- вычисление текущей дистанции до каждого ГМ как произведение времени распространения до ПО гидроакустического сигнала ГМ на хранящуюся в памяти бортового устройства вычисления координат последнюю по времени определения скорость распространения гидроакустического сигнала между ГМ и ПО;
- определение текущих координат ПО с использованием вычисленных дистанций до каждого ГМ и координат каждого ГМ, хранящихся в памяти бортового устройства вычисления координат.
Заявляемый способ позволяет реализовать скрытное высокоточное позиционирование любого количества ПО в любом районе Мирового океана.
Таким образом, заявленный технический результат – расширение зоны высокоточного позиционирования ПО – можно считать достигнутым.
Источники информации:
1. Справочник штурмана под ред. В.Д. Шандабылова // М.: Воениздат, 1968, 540 с.
2. Kinsey J.C., Eustice R.M., Whitcomb L.L. A Survey of Underwater Vehicle Navigation: Recent Advances and new Challenges // IFAC Conference on maneuvering and control of marine craft, 2006, Lisbon, Portugal.
3. Малеев П.И. Проблемы средств навигации АНПА и возможные пути их решения // Навигация и гидрография, 2015, № 39. - С.7-11.
4. Кебкал К.Г., Машошин А.И. Гидроакустические методы позиционирования автономных необитаемых подводных аппаратов // Гироскопия и навигация, 2016, №3 (94), с.115-130.
5. Дубровин Ф.С., Щербатюк А.Ф. Исследование некоторых алгоритмов одномаяковой мобильной навигации АНПА: результаты моделирования и морских испытаний // Гироскопия и навигация, 2015, № 4, с. 160-170.
6. Милн П.Х. Гидроакустические системы позиционирования // Л.: Судостроение, 1989.
7. Патент РФ № 2702700.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат подводного объекта в переходной зоне шельф - глубокое море | 2021 |
|
RU2752018C1 |
| Способ позиционирования подводных объектов | 2018 |
|
RU2702700C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ позиционирования подводного объекта на больших дистанциях | 2022 |
|
RU2794700C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
Использование: изобретение относится к способам навигации подводных объектов - подводных лодок, обитаемых и необитаемых подводных аппаратов, конкретно к способам их позиционирования. Сущность: гидроакустические маяки устанавливаются не стационарно в прибрежной зоне, а на надводных судах, находящихся в районе плавания подводных объектов. Текущие координаты каждого судна, на котором размещен гидроакустический маяк, определяются по сигналам спутниковой либо радионавигационной системы и путём кодирования закладываются в сигнал, излучаемый гидроакустическим маяком. Технический результат: расширение зоны высокоточного позиционирования ПО. 2 ил.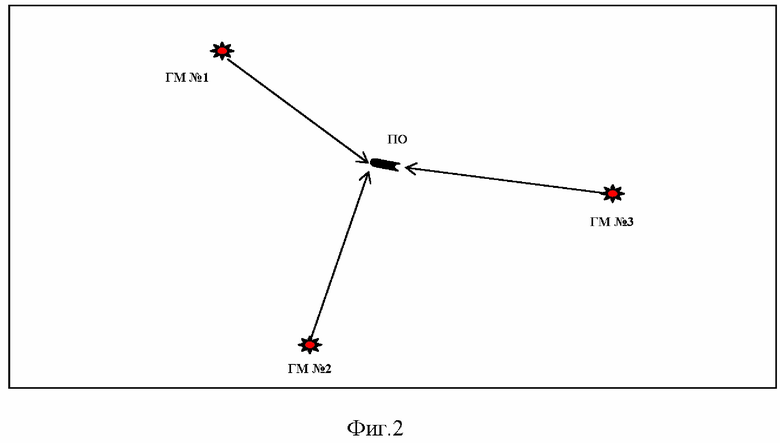
Способ позиционирования как минимум одного подводного объекта (ПО), снабженного гидроакустическим приемником и бортовым устройством вычисления координат, включающий установку как минимум двух гидроакустических маяков (ГМ), синхронизированных системой единого времени с ПО, излучение ГМ сложных гидроакустических сигналов на частоте ниже 10 кГц с заложенными в них посредством кодирования условного номера ГМ и времени излучения, приём гидроакустических сигналов гидроакустическим приемником ПО с фиксацией времени приёма, извлечение путём декодирования из принятых гидроакустических сигналов номера ГМ и времени излучения гидроакустического сигнала, периодическое определение скоростей распространения гидроакустического сигнала между каждым ГМ и ПО с использованием известных координат каждого ГМ, времён распространения гидроакустических сигналов между каждым ГМ и ПО и текущих координат ПО, определённых с использованием сигналов спутниковой навигационной системы, вычисление координат ПО с использованием известных координат ГМ, текущих скоростей распространения гидроакустических сигналов между каждым ГМ и ПО и времён распространения гидроакустических сигналов между каждым ГМ и ПО, отличающийся тем, что ГМ устанавливают на судах, находящихся в районе плавания ПО, при кодировании излучаемых ГМ сложных гидроакустических сигналов дополнительно закладывают в них текущие координаты судна, которые определяют по сигналам спутниковой навигационной системы, а при декодировании принятых ПО гидроакустических сигналов дополнительно извлекают из них текущие координаты ГМ.
| Способ позиционирования подводных объектов | 2018 |
|
RU2702700C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ определения координат подводного объекта в переходной зоне шельф - глубокое море | 2021 |
|
RU2752018C1 |
| US 20090216444 A1, 27.08.2009. | |||

