Изобретение относится к области гидроакустической навигации, и может быть использовано для измерения дистанции между гидроакустическими маяками (ГМ) и подводными объектами (ПО), находящимися вблизи оси подводного звукового канала (ПЗК).
При исследовании и освоении океана с применением ПО высокой автономности необходимо выполнять их позиционирование (определение собственных координат) на удалениях в сотнях километров от пунктов управления. Предназначенные для этого автономные бортовые навигационные инерциальные системы требуют периодической коррекции выходных координат: либо по сигналам от донных маяков-ответчиков по гидроакустическому каналу (требуется оборудование маяками-ответчиками района ограниченной площади функционирования ПО), либо по радионавигационным или спутниковым навигационным системам, что требует всплытия на поверхность. Многие задачи ПО выполняют без возможности всплытия (например, подо льдом) и в отсутствие судов сопровождения. В этих условиях позиционирование проводят посредством дальномерных синхронизированных навигационных систем с гидроакустическими маяками, причем для достижения большой дальности действия в навигационных системах используют мощные низкочастотные излучатели и сложные сигналы, причем акустический приемник ПО располагают вблизи оси ПЗК, используя уникальные свойства канала концентрировать акустическую энергию.
Преимущества использования сложных сигналов в радиолокации и гидроакустике заключается в том, что они наиболее пригодны для борьбы с характерной для больших дистанций многолучевостью распространения в среде сигнала источника путем выделения ее компонент взаимно корреляционной обработкой излученного и принятого сигналов в бортовом устройстве вычисления координат.Результатом является улучшение разрешения по дальности (или доплеровской частоте), улучшение помехозащищенности от пассивных и сосредоточенных по спектру помех, и, как следствие, возможность снижения мощности сигнала (или увеличения дальности приема) [1], стр. 575.
Одним из способов получения сложных сигналов является фазовая манипуляция несущей частоты, например, последовательностями максимальной длины (М-последовательности). Цифровая техника позволяет формировать и кодировать такие сигналы «с высокой точностью и стабильностью, что в сочетании с когерентностью несущей повышает точность формирования зондирующего и опорного сигналов». Помимо фазоманипулированных, в качестве сложных сигналов используют также частотно-модулированные или частотно-манипулированные сигналы [1].
Различия методов модуляции несущественны в случае соблюдения параметров модуляции, связанных с длительностью элементарного символа и частотным сдвигом, которые определяют полосу используемых частот и временное разрешение. Так, при частотной модуляции, длительность символа будет определять не только скорость следования их в канале распространения, но и величину суммарного частотного сдвига (девиация частоты, умноженная на время), в то время, как при фазовой - только его время и полосу, определяемую, как обратная величина от длительности символа.
Искаженный отражающими границами среды распространения, и ставший многолучевым, сигнал обнаруживают акустическим приемником ПО, и после его взаимно корреляционной обработки с электронной копией излученного, сигнал представляет собой последовательность острых неперекрывающихся пиков функции корреляции, которую называют «импульсной характеристикой канала» (ИХК), а в зарубежной литературе - «rake» (грабли, расческа), по причине схожести с внешним видом функции.
При формировании сложных сигналов для ГМ, входящих в навигационную систему большой дальности действия, необходимо учесть различие в технических характеристиках излучателей этих маяков, а именно отличия по полосам рабочих частот, присущих каждому излучателю. Поэтому такая характеристика сложного сигнала, как минимальное число периодов несущей частоты в одном символе кодовой последовательности, определяющая максимальную разрешающую способность во времени и полосу частот сигнала, должна соответствовать полосе рабочих частот излучателя.
В процессе позиционирования ПО возникает необходимость передать как навигационный сигнал, так и служебную информацию или команды. Для этого удобнее сформировать составной сигнал из нескольких, требуемых в конкретном случае (сигнальный фрейм). В связи с различиями в полосах частот, структуре навигационных сигналов, а также передаваемой информации, формируют для каждого ГМ отдельный сигнальный фрейм, который далее излучают в среду по установленному расписанию.
Погрешность измерения дистанции от ГМ до ПО зависит от погрешности измерения координат позиций излучателей навигационных сигналов (излучателей ГМ), и в большей степени - от погрешности определения скоростей звука на измеряемых дистанциях, а также погрешности определения моментов приема навигационных сигналов, пришедших от излучателя к приемнику по кратчайшему пути.
Координаты излучателей ГМ и необходимые для расчета дистанций данные о величине скорости звука предварительно вводят в память бортовой навигационной системы ПО, а работу маяков и бортового устройства вычисления координат ПО синхронизируют, устанавливая на них систему единого времени с приемниками GPS/ГЛОНАСС, а при невозможности их использования - высокоточные генераторы синхроимпульсов и программу расписания работ. Такой способ изложен, например, в патенте US 20120092964 А1 Long-range acoustical positioning system on continental shelf regions (Система акустического позиционирования на больших дальностях в районах континентального шельфа), в котором описаны способ и устройство для определения геофизического положения автономной подводной системы, использующей подводные акустические модемы, обменивающиеся сложными сигналами. Недостатком данного способа является ограниченная масштабами континентального шельфа и применением акустических модемов (работа в режиме «запрос-ответ») предельная дальность действия системы (около 100 км).
Известен также способ позиционирования подводных объектов по патенту РФ №2469346 С1, предназначенный для применения на больших дистанциях, который наиболее близок по содержанию к заявляемому и принят в качестве прототипа предложенного решения. В соответствии с этим изобретением, задача увеличения дальности действия и повышения точности позиционирования решается способом позиционирования как минимум одного ПО, снабженного акустическим приемником и бортовым устройством вычисления координат, заключающимся в установке в морской среде как минимум двух стационарных ГМ, синхронизированных системой единого времени между собой и с акустическим приемником ПО, излучении маяками гидроакустического сигнала, его приеме акустическим приемником подводного объекта, и последующем вычислении координат ПО с использованием известных координат ГМ и рассчитанных дистанций между ГМ и ПО на основе известных данных о скорости звука в среде и задержки во времени прихода полезных сигналов. Координаты маяков и электронные копии излучаемых ими сигналов вводят в память бортового устройства вычисления координат ПО заранее, а в качестве гидроакустического сигнала используют низкочастотные сложные сигналы с центральной частотой ниже 10 кГц. Вычисление координат ПО включает выделение бортовым устройством полезного сигнала гидроакустических маяков посредством их взаимно корреляционной обработки с электронной копией излученного сигнала в реальном времени. Там же определены условия по выбору прихода полезного сигнала на основе результатов корреляционной обработки: из последовательности максимумов ИХК, при дистанциях больших 20 км и глубокого моря, выбирается последний по времени, который обусловлен минимальной скоростью звука и ходом акустических лучей вблизи оси ПЗК по кратчайшему пути к приемнику ПО.
Однако, реализация указанного способа и последующие натурные эксперименты и показали, что по ИХК, получаемой после обработки бортовым вычислительным устройством ПО сигналов ГМ, не всегда возможно однозначно определить время последнего прихода полезного сигнала, поскольку ИХК может содержать несколько близких максимумов, появляющихся при смещении акустического приемника ПО относительно оси ПЗК. Поиск оси ПЗК по имеющимся гидрологическим данным, и даже определение ее положения в оперативном порядке гидрологическим зондом, связаны с определенной погрешностью, а зафиксировать и удерживать приемник ПО (или ПО целиком) на заданной глубине технически сложно. Поэтому в реальных условиях ПО, находясь в границах ПЗК, должен располагаться вблизи оси ПЗК, а неопределенность его положения, трансформирующаяся в изменение формы ИХК и, как следствие, в неопределенность момента регистрации прихода полезного сигнала, необходимо компенсировать.
Таким образом, существует проблема однозначного определения момента прихода полезного сигнала на приемник ПО, требующая решения для снижения погрешности расчета дистанций.
Технический результат предполагаемого изобретения заключается в снижении погрешности определения дистанций между излучателями ГМ и приемником ПО и, как следствие, в снижении погрешности позиционирования ПО.
Указанный технический результат достигается тем, что в способе позиционирования подводного объекта, снабженного акустическим приемником и бортовым устройством вычисления координат, включающем установку в морской среде как минимум двух излучателей гидроакустических маяков (ГМ) с известными координатами их позиций и синхронизированных системой единого времени между собой и совместно с акустическим приемником ПО, ввод электронных копий излучаемых маяками сигналов в память бортового устройства вычисления координат ПО, излучение маяками сложных низкочастотных сигналов, прием их акустическим приемником ПО вблизи оси ПЗК и вычисление времен приходов полезных сигналов посредством взаимно корреляционной обработки в реальном времени принятых сигналов с электронной копией излученных, вычисление дистанций между излучателями ГМ и приемником ПО, а также координат ПО с использованием известных координат излучателей ГМ, при этом для каждого ГМ формируют отдельный сигнальный фрейм, который включает не менее двух сложных низкочастотных сигналов в виде кодовых последовательностей, отличающихся разрешающей способностью во времени не менее чем в 2 раза, например, фазоманипулированные или частотно-модулированные сигналы, при этом время прихода сигналов фрейма, прошедших в ПЗК по своим лучевым траекториям вычисляют с разрешением, равным длительности одного символа каждой из последовательностей фрейма, а время прихода полезного сигнала для вычисления дистанций между излучателями ГМ и приемником ПО определяют по времени появления одиночного максимума наибольшей энергии при сравнении всех корреляционных функций фрейма.
Существует вариант способа, отличающийся тем, что в качестве сложных низкочастотных сигналов используют фазовую модуляцию несущей частоты излучения последовательностями максимальной длины (М-последовательностями), поскольку при излучении таких сигналов в пределах длительности импульса мощность системы излучения постоянна и источники электропитания аппаратуры излучения сигналов используются достаточно эффективно.
Способ позиционирования подводного объекта на больших дистанциях реализуется следующим образом.
В качестве ГМ используют гидроакустический комплекс (ГАК), включающий аппаратуру формирования и усиления мощности сигналов, а также широкополосный низкочастотный гидроакустический излучатель. С помощью аппаратуры ГАК программно формируют отдельный сигнальный фрейм, включающий в качестве навигационных два сложных сигнала, и загружают их в память генераторов сигналов ГМ. Этими сигналами в сигнальном фрейме являются, например, две фазоманипулированные М-последовательности, различающиеся длительностью и числом символов, что впоследствии, при корреляционной обработке пришедших к приемнику ПО сигналов, позволяет интегрировать акустическую энергию элементарных лучевых приходов на соответствующих длительностях символов, и получить для одного из сигналов импульсную характеристику, имеющую однозначно определяемый пик (максимум энергии). Количество отличных разрешающей способностью сигналов в составе фрейма не может быть большим ввиду увеличения времени позиционирования и перегрузки усилителя мощности ГМ излучением импульса большой длительности. Предпочтительным и достаточным является наличие в сформированном фрейме от двух до пяти сигналов с кратностью длительности одного символа не менее 2 и не более 10, что более точно определяется численным моделированием и акустической калибровкой навигационного района. Выделение же момента появления максимума энергии позволяет достоверно определить время задержки прихода сигнала от излучателя ГМ к приемнику ПО.
До перехода ПО в навигационный район выполняют процедуру синхронизации работы двух ГМ и ПО, в результате которой бортовое устройство вычисления координат ведет постоянно отсчет времени от программно обозначенного системой единого времени момента излучения сигнального фрейма каждым из ГМ до появления полезных сигналов на приемнике ПО.
ПО переходит в навигационный район, где, используя бортовой измеритель скорости звука, определяет по минимуму скорости звука ось ПЗК и, маневрируя вблизи оси ПЗК, принимает сигналы каждого ГМ акустическим приемником.
В бортовом устройстве вычисления координат принятые сигналы декодируют посредством взаимно корреляционной обработки принятых сигналов с их электронными копиями, содержащимися в памяти устройства, причем дистанции между каждым ГМ и приемником ПО вычисляют после обработки всех последовательностей соответствующего маяку сигнального фрейма, для чего вначале сравнивают все корреляционные функции фрейма по количеству и энергии максимумов, далее выделяют среди них корреляционную функцию с одиночным максимумом наибольшей энергии, и определяют время, соответствующее этому максимуму. Полученное время, которое соответствует задержке прихода сигналов от излучателя ГМ, далее используют для расчета искомой дистанции умножением на известную на данной акустической трассе скорость звука.
Таким образом, наличие в сформированном фрейме сигналов с различной разрешающей способностью позволяет за счет интегрирования акустической энергии в границах ПЗК получить при корреляционной обработке принятых сигналов однозначно определяемый максимум энергии даже при возможных смещениях приемника относительно оси ПЗК, а, следовательно, достоверно определить время прихода сигналов, что снижает погрешность определения дистанций между излучателем ГМ и ПО и решает поставленную задачу, а именно, снизить погрешность определения дальности и погрешности позиционирования ПО.
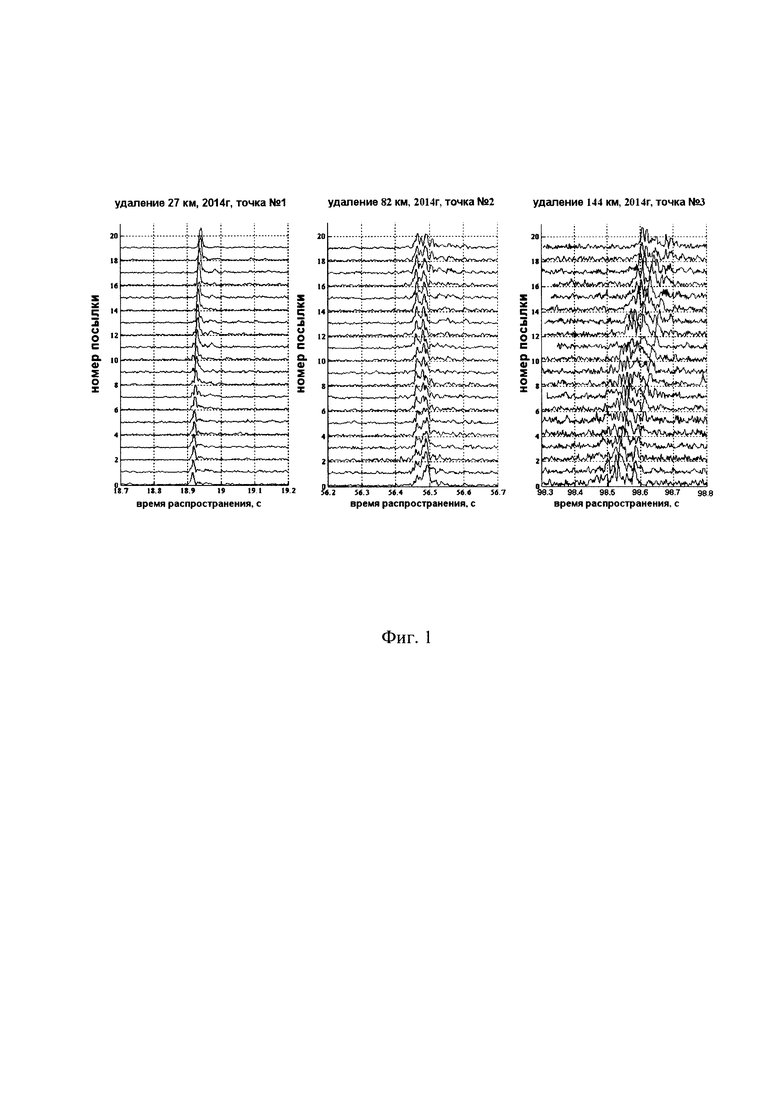
На фиг. 1 приведены результаты эксперимента, проведенного в Японском море в апреле 2014 года [2]. Эксперимент проводился в течение пяти суток и заключался в приеме сложных сигналов в трех точках на удалении 27, 82 и 144 км от источника, расположенного на шельфе. Один раз в минуту излучались фазоманипулированные сигналы с центральной частотой 500 Гц (М-последовательности, 255 символов, 4 периода несущей частоты на символ). В качестве имитатора приемного тракта ПО использовался радиогидроакустический буй с гидрофоном, заглубленным ориентировочно до оси ПЗК. Производилось вычисление функций взаимной корреляции принятых сигналов с репликами излученных для получения импульсных откликов канала распространения.
На фиг. 1 приведены 20-минутные фрагменты импульсных характеристик, полученные в трех точках трассы. Можно отметить стабильную, с хорошим превышением над помехой структуру приходов сигналов. По временам приходов видно, что в первых двух точках буй с приемной системой дрейфовал приблизительно перпендикулярно трассе источник - приемник, а в третьей удалялся от источника. В первой точке, расположенной над свалом глубин, импульсная характеристика состоит из одного прихода акустической энергии, т.к., по-видимому, удалось поместить приемный гидрофон точно на оси ПЗК. Во второй точке наблюдается от двух до четырех приходов акустической энергии, распространяющейся по лучевым траекториям вблизи оси ПЗК, но максимальные значения стабильно отмечаются на двух приходах с разницей во времени около 30 мс. Более сложная структура из семи приходов, растянутых по времени до 100 мс, фиксируется в третьей точке.
Эти результаты показывают важность выбора оптимальных характеристик излучаемых сигналов, что может быть достигнуто посредством излучения сигнального фрейма, состоящего из нескольких отличных по длительности символа сигналов. Для случая растянутой во времени импульсной характеристики оптимальным становится применение сложных сигналов с более узкой полосой и большей длительностью символа, которое позволяет интегрировать акустическую энергию элементарных лучевых приходов, пришедших в точку приема в более широком диапазоне углов и на большем временном интервале. Кроме этого, достигается снижение погрешности измерения времени прохождения сигналов между излучателем ГМ и приемником ПО, т.к. принимается один стабильный по времени приход акустической энергии.
Таким образом, заявляемый способ является промышленно реализуемым, а его применение уменьшает погрешность позиционирования ПО.
ЛИТЕРАТУРА
1. Гидроакустическая энциклопедия/ Под общ. ред. В.И. Тимошенко. -Таганрог: Издательство. ТРТУ, 1999, -788 с., илл., табл.
2. Моргунов Ю.Н., Безответных В.В., Бородин А.Е., Буренин А.В., Войтенко Е.А. Исследование особенностей функционирования региональной системы подводного навигационного обеспечения в различных гидрологических условиях// Фундаментальная и прикладная гидрофизика. 2016. Т. 9, №3. С. 80-86.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| Способ определения координат подводного объекта в переходной зоне шельф - глубокое море | 2021 |
|
RU2752018C1 |
| Способ позиционирования подводных объектов | 2021 |
|
RU2771443C1 |
| Способ позиционирования подводных объектов | 2018 |
|
RU2702700C1 |
Использование: изобретение относится к области гидроакустической навигации и направлено на решение проблемы однозначного определения момента прихода полезного сигнала от гидроакустического маяка на приемник подводного объекта, находящийся вблизи оси подводного звукового канала (ПЗК). Сущность: позиционирование осуществляют посредством синхронизированной дальномерной гидроакустической навигационной системы большой дальности действия, что предполагает использование нескольких гидроакустических маяков, уникальных свойств ПЗК, информации о скорости звука на измеряемой дистанции, а также определения задержки прихода полезного сигнала к подводному объекту, которая выявляется в результате корреляционного анализа не менее двух принятых сигналов, составляющих специальный фрейм, и выделения в нем корреляционной функции с одиночным максимумом наибольшей энергии. Технический результат: снижение погрешности определения дистанции между маяком и приемником и погрешности позиционирования подводного объекта. 1 з.п. ф-лы, 1 ил.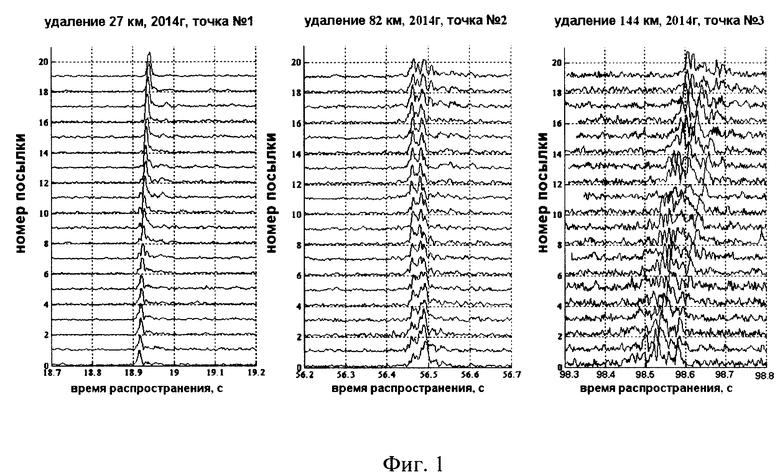
1. Способ позиционирования подводного объекта (ПО) на больших дистанциях, снабженного акустическим приемником и бортовым устройством вычисления координат, включающим установку в морской среде как минимум двух излучателей гидроакустических маяков (ГМ) с известными координатами их позиций и синхронизированных системой единого времени между собой и совместно с акустическим приемником ПО, ввод электронных копий излучаемых маяками сигналов в память бортового устройства вычисления координат ПО, излучение маяками сложных низкочастотных сигналов, прием их акустическим приемником ПО вблизи оси ПЗК и вычисление времен приходов полезных сигналов посредством взаимно-корреляционной обработки в реальном времени принятых сигналов с электронной копией излученных, вычисление дистанций между излучателями ГМ и приемником ПО, а также координат ПО с использованием известных координат излучателей ГМ, отличающийся тем, что для каждого ГМ формируют отдельный сигнальный фрейм, который включает не менее двух сложных низкочастотных сигналов в виде кодовых последовательностей - фазоманипулированных сигналов, отличающихся разрешающей способностью во времени не менее чем в 2 раза, при этом время прихода сигналов фрейма, прошедших в ПЗК по своим лучевым траекториям, вычисляют с разрешением, равным длительности одного символа каждой из последовательностей фрейма, а время прихода полезного сигнала для вычисления дистанций между излучателями ГМ и приемником ПО определяют по времени появления одиночного максимума наибольшей энергии при сравнении корреляционных функций фрейма.
2. Способ по п. 1, отличающийся тем, что в качестве сложных низкочастотных сигналов используют фазовую модуляцию несущей частоты излучения последовательностями максимальной длины - М-последовательностями.
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Способ позиционирования подводных объектов | 2021 |
|
RU2771443C1 |
| US 9223002 B2, 29.12.2015. | |||

