Изобретение относится к инерционной навигации, а именно к навигационным приборам, определяющих параметры движения объекта управления, и может быть применено в системах навигации и автоматического управления.
Известна бесплатформенная инерциальная навигационная система (БИНС) [патент RU №2704198, МПК G01C 21/00, G01C 19/66, опуб. 24.10.2019 г.], включающая корпус, устройство измерения линейного ускорения по трем измерительным осям, устройство измерения угловой скорости по трем измерительным осям, выполненные с обеспечением ортогональности их измерительных осей, сервисную электронику, состоящую из блока сбора данных и блока вычислителя, и блок вторичного электропитания.
В известной системе устройство измерения линейного ускорения (блок из трех акселерометров) и устройство измерения угловой скорости (лазерные гироскопы) выполнены в виде инерциального моноблока, который закреплен на монтажной раме. Внутренняя полость инерциального моноблока содержит разделенные перегородкой первый и второй отсеки. В первом отсеке установлен блок чувствительных элементов (БЧЭ), во втором отсеке установлены источник вторичного питания, преобразователь сигналов датчиков и, по меньшей мере, один вычислитель. Блок из трех акселерометров размещен в едином жестком корпусе, обеспечивающем при его закреплении в БЧЭ параллельность осей чувствительности акселерометров и лазеров. Система снабжена соединительными элементами для электрической связи функциональных элементов БИНС с внешними устройствами. Корпус моноблока имеет на наружной поверхности одну ручку для переноса и перемещения моноблока в монтажной раме. В известной системе за счет выполнения корпуса моноблока двухсекционным с размещением всех чувствительных элементов в едином блоке БЧЭ позволяет повысить точность формирования выходной информации БИНС.
Однако недостатком является относительно невысокая точность измерения параметров движения из-за наличия большого количества конструктивных переходов между базовыми поверхностями чувствительных элементов и установочной поверхностью монтажной рамы, наличие тонкостенных пермалевых экранов и крышек (люков), сложности конструкции, а также значительных габаритов и массы ведет к невысокой стойкости к внешним воздействиям.
Известна навигационная система, описанная в патенте на изобретение «Навигационная система и корпус навигационной системы» [патент RU №2430333, МПК G01C 21/00, опуб. 27.09.2011 г.], наиболее близкая по технической сущности к заявляемому изобретению и поэтому принятая за прототип. Известная система содержит корпус, устройство измерения линейного ускорения с тремя чувствительными элементами, расположенными по трем взаимно перпендикулярным осям, устройство измерения угловой скорости с тремя волоконно-оптическими каналами, расположенными по трем взаимно перпендикулярным осям, блок электроники, состоящий из блока сбора данных и блока вычислителя, и блок вторичного электропитания.
В прототипе гироскопы расположены со стороны двух смежных боковых граней и верхней грани корпуса. Гироскопы и акселерометры снабжены защитными крышками и закреплены в корпусе на базовых поверхностях. Смежные боковые грани корпуса снабжены защитными кожухами, выполненными с возможностью размещения в них гироскопов и акселерометров. Внутренняя поверхность защитных кожухов имеет сложную рельефную форму, обусловленную формированием базовых поверхностей, состоящих из базовых опорных элементов, расположенных по периметру внутренней поверхности защитных кожухов.
Недостатком прототипа, как и вышеприведенного аналога, является относительно невысокая точность измерения параметров движения и невысокая стойкость к внешним воздействиям. Корпус (монтажная рама), в который установлены гироскопы и акселерометры, выполнен сложной формы и не обеспечивает ортогональность базовых поверхностей, на которые установлены чувствительные элементы, что приводит к появлению дополнительной погрешности рассогласования осей чувствительности и ведет к снижению точности измерения параметров движения, а наличие защитных крышек и кожухов ведет к появлению побочных резонансов на низких частотах, что снижает стойкость к внешним воздействиям.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение точности измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам.
Технический результат достигается тем, что в бесплатформенную инерциальную систему, включающую корпус, устройство измерения линейного ускорения с тремя чувствительными элементами, расположенными по трем взаимно перпендикулярным осям, устройство измерения угловой скорости с тремя волоконно-оптическими каналами, расположенными по трем взаимно перпендикулярным осям, блок электроники, состоящий из блока сбора данных и блока вычислителя, и блок вторичного электропитания, согласно изобретения в систему введено жесткое несущее основание, выполненное в виде диска, на одной стороне которого закреплено устройство измерения угловой скорости, а на обратной стороне - устройство измерения линейного ускорения с блоком сбора данных, которые объединены в блок датчиков с условием обеспечения параллельности измерительных осей устройства измерения линейного ускорения, устройства измерения угловой скорости и блока датчиков, при этом блок датчиков закреплен в корпусе, являющемся частью объекта управления, с обеспечением параллельности измерительных осей блока датчиков и осей корпуса, в систему также введена жесткая рама, одной стороной прикрепленная к жесткому несущему основанию, а другой стороной - к корпусу, при этом внутри рамы закреплен блок вычислителя, выполненный на печатных платах, а каждая из плат установлена в собственную опорную рамку, при этом блок вторичного электропитания установлен снаружи рамы на максимально допустимом удалении от блока датчиков.
Введение жесткого несущего основания, выполненного в виде диска, на одной стороне которого закреплено устройство измерения угловой скорости, а на обратной стороне - устройство измерения линейного ускорения с блоком сбора данных, которые объединены в блок датчиков с условием обеспечения параллельности измерительных осей устройства измерения линейного ускорения, устройства измерения угловой скорости и блока датчиков, позволяет обеспечить параллельность установочных поверхностей измерительных устройств относительно базовых поверхностей несущего основания, а также обеспечить близкое расположение измерительных осей измерительных устройств, что в свою очередь уменьшает погрешность разориентации измерительных осей и увеличивает точность преобразования параметров движения. Выполнение несущего основания в виде диска и закрепление измерительных устройств и блока сбора данных на несущем основании позволяет увеличить жесткость конструкции системы и обеспечить надежность крепления элементов системы, исключив тем самым побочные резонансы на низких частотах и обеспечив стойкость работы в условиях воздействия широкополосной случайной вибрации и механических ударов.
Закрепление блока датчиков в корпусе, являющемся частью объекта управления, с обеспечением параллельности измерительных осей блока датчиков и осей корпуса позволяет обеспечить точную привязку измерительных осей блока датчиков и осей объекта управления, что позволяет уменьшить погрешность измерения, которая вызвана разориентацией осей объекта управления и измерительных осей блока датчиков, повышая тем самым точность измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам.
Введение в систему жесткой рамы, одной стороной прикрепленной к жесткому несущему основанию, а другой стороной - к корпусу, при этом внутри рамы закреплен блок вычислителя, выполненный на печатных платах, а каждая из плат установлена в собственную опорную рамку, обеспечивает более жесткое и надежное закрепление блока вычислителя к корпусу системы, что в свою очередь ведет к исключению побочных резонансов на низких частотах и обеспечивает работоспособность системы в условиях воздействия широкополосной случайной вибрации и механических ударов.
Установка блока вторичного электропитания снаружи рамы на максимально допустимом удалении от блока датчиков позволяет уменьшить воздействие тепла, выделяемого блоком вторичного электропитания на чувствительные элементы измерительных устройств, тем самым уменьшая погрешность измерения, вызванную не стационарностью окружающей температуры, что ведет к увеличению точности измерения параметров движения.
Кроме того, введение в систему блока спутниковой навигации, расположенного внутри рамы, позволяет получить дополнительные данные о параметрах движения объекта управления и скорректировать полученные блоком датчиков данные движения объекта управления.
В качестве устройства измерения угловой скорости использован трехосный блок волоконно-оптических гироскопов марки ТИУС500, а в качестве устройства измерения линейного ускорения - блок акселерометров марки БА-30С.
Таким образом, совокупность существенных признаков позволяет получить технический результат в виде повышения точности измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами:
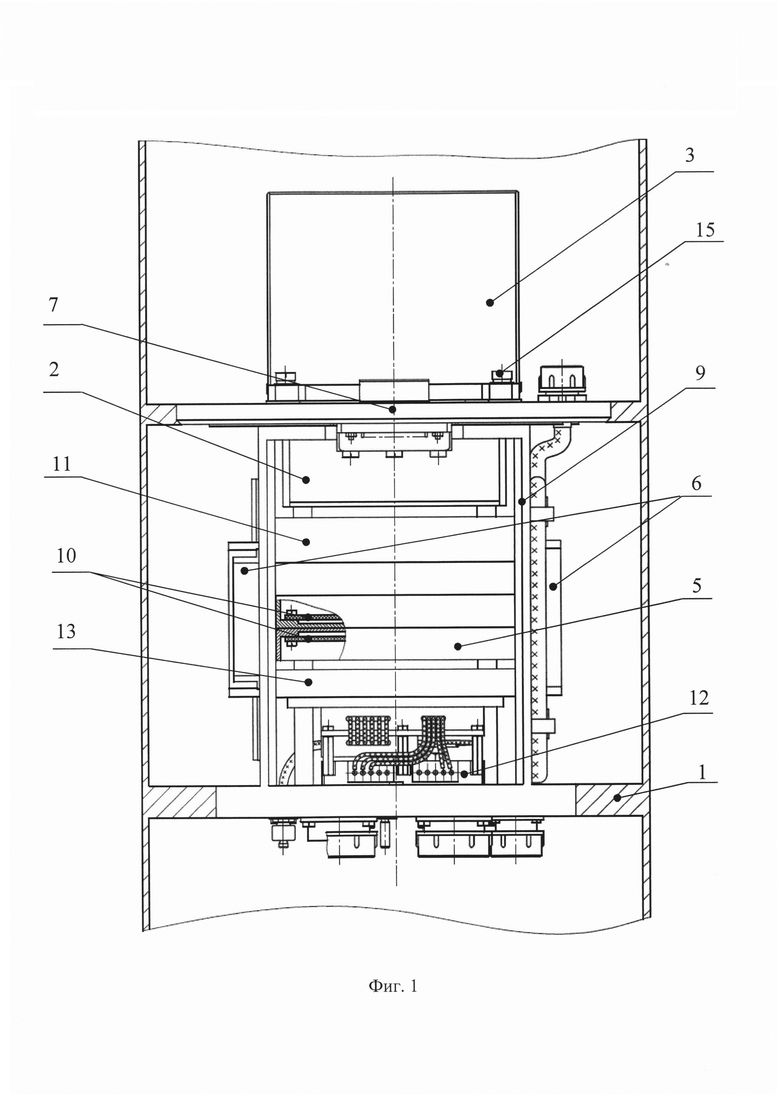
На фиг. 1 представлен общий вид бесплатформенной инерциальной системы;
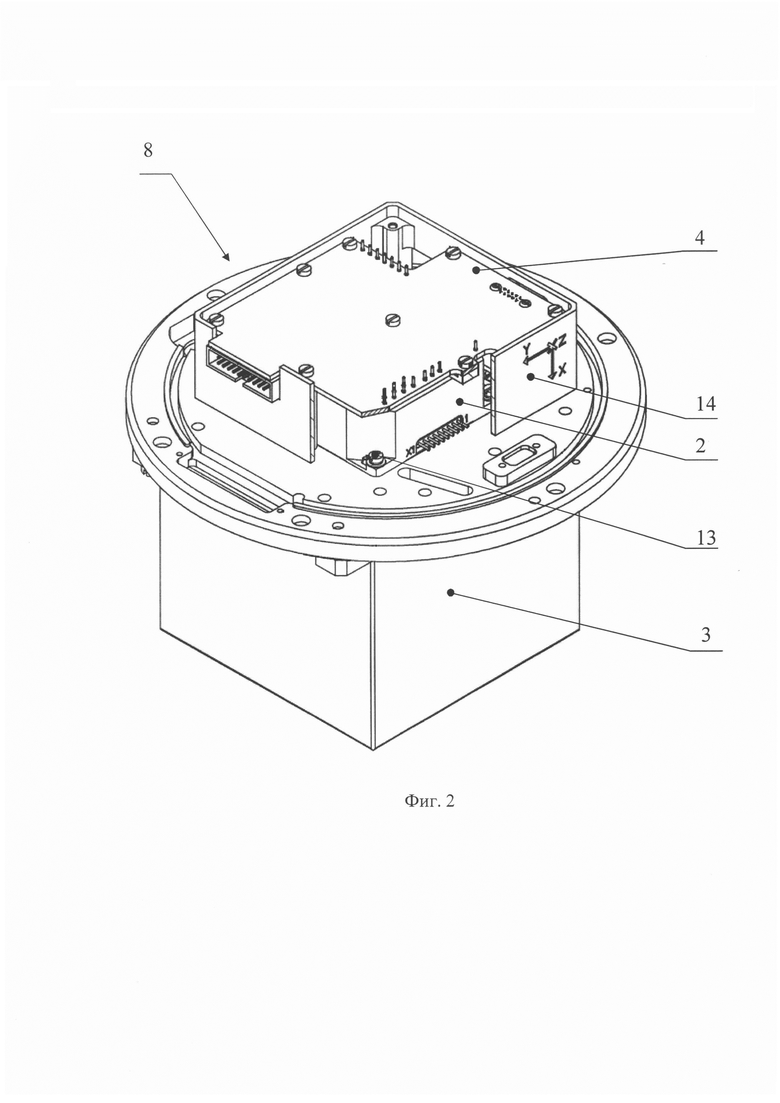
На фиг. 2 представлен вид блока датчиков.
Устройство выполнено следующим образом.
Бесплатформенная инерциальная система (фиг. 1, 2) включает корпус 1, являющийся частью объекта управления, устройство измерения линейного ускорения 2 с тремя чувствительными элементами, расположенными по трем взаимно перпендикулярным осям, устройство измерения угловой скорости 3 с тремя волоконно-оптическими каналами, расположенными по трем взаимно перпендикулярным осям, а также блок электроники, состоящий из блока сбора данных 4 и блока вычислителя 5, и блок вторичного электропитания 6. В качестве устройства измерения линейного ускорения 2 использован блок акселерометров марки БА-30С, а в качестве устройства измерения угловой скорости 3 - трехосный блок волоконно-оптических гироскопов марки ТИУС500. В систему также введено жесткое несущее основание 7, имеющее форму диска, на одной стороне которого закреплен блок гироскопов 3, а на обратной стороне - блок акселерометров 2 с блоком сбора данных 4. Блоки 2, 3, 4, закреплены на диске 7 и формируют блок датчиков 8 (фиг. 2) с условием обеспечения параллельности измерительных осей блоков 2, 3 и 8. При этом блок датчиков 8 закреплен в корпусе 1 с обеспечением параллельности его измерительных осей и осей корпуса 1. В систему введена жесткая рама 9, одной стороной прикрепленная к диску 7, а другой стороной - к корпусу 1. Рама 9 имеет внутреннюю полость, в которой закреплен блок вычислителя 5, выполненный на печатных платах 10, при этом каждая из плат установлена в собственную опорную рамку 11. Блок вторичного электропитания 6 (фиг. 1) установлен снаружи по бокам рамы 9 и расположен на максимальном удалении от блока датчиков 8. Внутри рамы 9 также закреплен блок спутниковой навигации 12.
Сборка устройства осуществляется следующим образом.
Предварительно выполняется сборка блока датчиков 8 (фиг. 2). На одну сторону несущего основания - диска 7 на штифты (не показаны) устанавливают блок акселерометров 2 и фиксируют винтами 13. Над блоком акселерометров 2 на кронштейне 14 устанавливается блок сбора данных 4, который фиксируют к диску 7 винтами (не показано). На обратную сторону диска 7 при помощи штифтов (не показаны) позиционируют блок волоконно-оптических гироскопов 3 и закрепляют винтами 15 (фиг. 1), при этом обеспечивая условие параллельности измерительных осей блоков 2, 3 и 8. Для обеспечения информационного взаимодействия блоки 2, 3 и 4 соединены при помощи проводов (не показано). Закрепление измерительных устройств 2, 3 и блока сбора данных 4 на несущем основании - диске 7 позволяет увеличить жесткость конструкции системы и обеспечить надежность крепления элементов системы, исключив тем самым побочные резонансы на низких частотах и обеспечив стойкость работы в условиях воздействия широкополосной случайной вибрации и механических ударов. А их близкое расположение друг к другу в свою очередь уменьшает погрешность разориентации измерительных осей и увеличивает точность преобразования параметров движения. Далее на блок датчиков 8 устанавливают жесткую раму 9, которую крепят к диску 7 винтами (не показано). При этом на внешних гранях жесткой рамы 9 размещают блок вторичного электропитания 6, который закрепляют на максимально допустимом удалении от блока датчиков 8 для уменьшения воздействия тепла, выделяемого блоком вторичного электропитания 6 на чувствительные элементы измерительных устройств, тем самым уменьшая погрешность измерения. Внутрь жесткой рамы 9 устанавливают блок вычислителя 5, выполненный на отдельных печатных платах 10, каждая плата установлена в собственную опорную рамку 11. Блок вычислителя 5 закрепляют в жесткой раме 9 при помощи винтов (не показано). В раму 9 также устанавливают блок спутниковой навигации 12. Закрепление внутри жесткой рамы 9 блока вычислителя 5 и блока спутниковой навигации 12 ведет к исключению побочных резонансов на низких частотах, обеспечивая работоспособность системы в условиях воздействия широкополосной случайной вибрации и механических ударов. При этом блоки 8 и 12 соединены при помощи плоских жгутов (не показано) с блоком вычислителя 5 для передачи данных. Также блоки 5, 8, 12 подключены к блоку электропитания 6 при помощи проводов для обеспечения электропитания. Затем блок датчиков 8 с установленной на него жесткой рамой 9, внутри которой расположены блоки 5 и 12, и закрепленным на внешних гранях жесткой рамы 9 блоком 6 устанавливается в корпус 1 с обеспечением параллельности измерительных осей блока датчиков 8 и осей корпуса 1, обеспечивая точную привязку измерительных осей и уменьшая погрешность измерения. Бесплатформенная инерциальная система готова к применению. Таким образом, заявляемая бесплатформенная инерциальная система позволяет повысить точность измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам.
В настоящее время ведется разработка документации, запланированы изготовление и предварительные испытания опытных образцов бесплатформенной инерциальной системы, выполненной в соответствии с заявляемым изобретением. Работоспособность подтверждена расчетами.
Итак, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- устройство, воплощающее заявленное изобретение при его осуществлении, относится к навигационным приборам управления и может быть применено в системах навигации и автоматического управления;
- средство, воплощающее заявленное устройство при его осуществлении, предназначено для повышения точности измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам;
- для заявляемого устройства в том виде, в котором оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявленная полезная модель соответствует условию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА | 2019 |
|
RU2720184C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
Изобретение относится к инерционной навигации, а именно к навигационным приборам, определяющих параметры движения объекта управления, и может быть применено в системах навигации и автоматического управления. Бесплатформенная инерциальная система включает корпус, устройство измерения линейного ускорения с тремя чувствительными элементами, расположенными по трем взаимно перпендикулярным осям, устройство измерения угловой скорости с тремя волоконно-оптическими каналами, расположенными по трем взаимно перпендикулярным осям, блок электроники, состоящий из блока сбора данных и блока вычислителя, и блок вторичного электропитания. В систему введено жесткое несущее основание, выполненное в виде диска, на одной стороне которого закреплено устройство измерения угловой скорости, а на обратной стороне - устройство измерения линейного ускорения с блоком сбора данных, которые объединены в блок датчиков с условием обеспечения параллельности измерительных осей устройства измерения линейного ускорения, устройства измерения угловой скорости и блока датчиков. Блок датчиков закреплен в корпусе, являющемся частью объекта управления, с обеспечением параллельности измерительных осей блока датчиков и осей корпуса. В систему также введена жесткая рама, одной стороной прикрепленная к жесткому несущему основанию, а другой стороной - к корпусу. Внутри рамы закреплен блок вычислителя, выполненный на печатных платах, а каждая из плат установлена в собственную опорную рамку. Блок вторичного электропитания установлен снаружи рамы на максимально допустимом удалении от блока датчиков. В частном случае реализации в систему введен блок спутниковой навигации, расположенный внутри рамы. Технический результат - повышение точности измерения параметров движения при обеспечении стойкости к внешним воздействующим факторам. 2 з.п. ф-лы, 2 ил.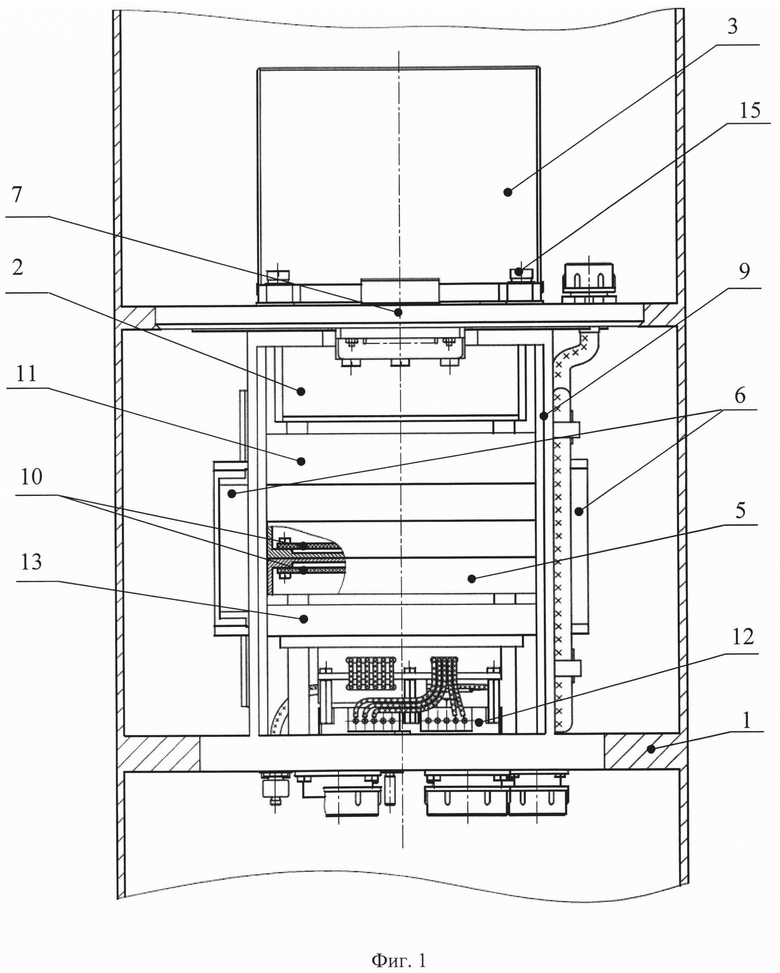
1. Бесплатформенная инерциальная система, включающая корпус, устройство измерения линейного ускорения с тремя чувствительными элементами, расположенными по трем взаимно перпендикулярным осям, устройство измерения угловой скорости с тремя волоконно-оптическими каналами, расположенными по трем взаимно перпендикулярным осям, блок электроники, состоящий из блока сбора данных и блока вычислителя, и блок вторичного электропитания, отличающаяся тем, что в систему введено жесткое несущее основание, выполненное в виде диска, на одной стороне которого закреплено устройство измерения угловой скорости, а на обратной стороне - устройство измерения линейного ускорения с блоком сбора данных, которые объединены в блок датчиков с условием обеспечения параллельности измерительных осей устройства измерения линейного ускорения, устройства измерения угловой скорости и блока датчиков, при этом блок датчиков закреплен в корпусе, являющемся частью объекта управления, с обеспечением параллельности измерительных осей блока датчиков и осей корпуса, в систему также введена жесткая рама, одной стороной прикрепленная к жесткому несущему основанию, а другой стороной - к корпусу, при этом внутри рамы закреплен блок вычислителя, выполненный на печатных платах, а каждая из плат установлена в собственную опорную рамку, при этом блок вторичного электропитания установлен снаружи рамы на максимально допустимом удалении от блока датчиков.
2. Бесплатформенная инерциальная система по п. 1, отличающаяся тем, что в систему введен блок спутниковой навигации, расположенный внутри рамы.
3. Бесплатформенная инерциальная система по пп. 1, 2, отличающаяся тем, что в качестве устройства измерения угловой скорости использован трехосный блок волоконно-оптических гироскопов марки ТИУС500, а в качестве устройства измерения линейного ускорения использован блок акселерометров марки БА-30С.
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА | 2019 |
|
RU2720184C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

