Изобретение относится к конструкции навигационного устройства, именуемого в соответствии с терминологией, принятой данной области техники, как "Бесплатформенная инерциальная навигационная система" (БИНС), и предназначенного для определения пилотажно-навигационных параметров движения, географических координат и параметров углового положения летательного аппарата в пространстве, и обеспечивает соответствующей информацией другие системы комплекса пилотажного оборудования.
Известна бортовая система мониторинга и управления средств обеспечения полетов, содержащая бесплатформенную инерциальную навигационную систему (БИНС), в состав которого входят: акселерометр, гироскоп (RU 198963, с приоритетом от 24.03.2020).
Недостатком этой системы является ограниченность функциональных возможностей, не позволяющая эффективно применять ее для определения ускорений, скоростей, географических координат и параметров углового положения летательного аппарата в пространстве.
Известен бортовой прибор беспилотного летательного аппарата, обладающий функциями навигационной системы, содержащий программно-аппаратный комплекс, состоящий из вычислителя на основе одноплатного компьютера с платой расширения и инерциального измерительного блока, аппаратно расположенного на плате расширения; бортовой видеокамеры для получения видеопотока и передачи его в вычислитель по USB-интерфейсу, RGB-D - камеры для получения поля глубин в области видимости устройства и передачи его на вычислитель по USB-интерфейсу; полетного контроллера, связанного через систему управления корпуса беспилотного летательного аппарата с платой расширения для распределения и передачи команд, управляющих частотой вращения двигателей и системой стабилизации летательного аппарата, приемника радиосигналов для приема сигналов от сторонней системы управления и передачи их для обработки в вычислитель по интерфейсу связи S.BUS, вращающегося лазерного сканера-дальномера для передачи информации в вычислитель, стационарного лазерного дальномера для определения точечных расстояний до объектов окружающей среды и передачи этой информации в вычислитель по интерфейсу связи UART, причем инерционный измерительный блок состоит из гироскопа, определяющего угловую скорость вращения вокруг собственных осей X, Y и Z, акселерометра, определяющего величину ускорения свободного падения по осям X, Y, и Z, компаса, определяющего углы между собственными осями сенсора X, Y и Z и силовыми линиями магнитного поля Земли, а управляющие сигналы на контроллеры скорости осуществляются методом широтно-импульсной модуляции (RU 195749 с приоритетом от 15.07.2019).
Недостатками данного устройства являются низкая точность, обусловленная значительной чувствительностью к взаимным воздействиям аппаратуры и внешним факторам, и ограничения по количеству гироскопов и акселерометров, при этом отсутствует возможность резервирования аппаратуры навигации.
Известна бесплатформенная инерциальная навигационная система, содержащая три микромеханических гироскопа, три микромеханических акселерометра, микросборки сервисной электроники, фланцы и блок плат, включающий плату интерфейса, плату контроллера, первую, вторую и третью платы аналого-цифрового преобразователя, крышку и корпус, выполненный в виде несущего кронштейна, имеющего форму шестигранника с внутренней полостью и базовыми плоскостями по его граням, на которых с помощью фланцев крепятся три микромеханических гироскопа и три микромеханических акселерометра с микросборками сервисной электроники. Блок плат, включающий плату интерфейса, плату контроллера, первую, вторую и третью платы аналого-цифрового преобразователя, крепится во внутренней плоскости в центре несущего кронштейна, а внутренняя полость, содержащая блок плат, заполняется компаундом, при этом микромеханические гироскопы и акселерометры выполнены в капсульном исполнении (RU 75033 с приоритетом от 14.04.2008).
Недостатками данного устройства являются низкая точность, обусловленная значительной чувствительностью к взаимным воздействиям аппаратуры и внешним факторам, наличием соединительных кабелей и необходимостью установки дополнительного кожуха для защиты радиоэлементов от внешних воздействий, что негативно влияет на рассеивание тепла и на массогабаритные характеристики системы.
Известна бесплатформенная инерциальная навигационная система, в которой существует разделение блока чувствительных элементов и несущей системы всего блока, включающая инерциальный моноблок с герметичной крышкой, и монтажную раму, при этом корпус моноблока имеет соединительные элементы для электрической связи функциональных элементов с внешними устройствами, функциональные элементы размещены внутри инерциального моноблока, при этом внутренняя полость инерциального моноблока содержит разделенные перегородкой первый и второй отсеки, причем в первом отсеке установлен блок чувствительных элементов, выполненный в виде единого корпуса кубической формы с герметизируемыми с помощью крышек четырьмя полостями, при этом в трех взаимно ортогональных полостях расположены кольцевые лазеры прямоугольной формы с функциональной электроникой лазерного гироскопа, а в четвертой - высоковольтный источник напряжения, устройство регулирования периметра и контроля лазерных гироскопов, а также блок из трех акселерометров, размещенных в едином жестком корпусе, обеспечивающем при его закреплении в БЧЭ параллельность осей чувствительности акселерометров и кольцевых лазеров, при этом корпус БЧЭ закрыт снаружи магнитными экранами и снабжен амортизаторами для крепления к стенкам инерциального моноблока, а во втором отсеке установлены источник вторичного питания, преобразователь сигналов датчиков и, по меньшей мере, один вычислитель (RU 2704198 с приоритетом от 28.03.2019).
Недостатками данного устройства являются низкая точность, обусловленная значительной чувствительностью к взаимным воздействиям аппаратуры и внешним факторам, а также сложность конструкции с большим количеством переходных деталей, что в результате приводит к высокой плотности компоновки аппаратуры и ее взаимному воздействию и, следовательно, к увеличению массы, затруднению рассеивания тепла, сложности доступа для обслуживания и снижению точности устройства в целом.
Также известна бесплатформенная инерциальная навигационная система, содержащая блок гироскопов, группу акселерометров и блок электроники с высоковольтным источником напряжения, размещенный на корпусе, связанном с основанием, на котором смонтирована монтажная рама, а также соединительные элементы для связи упомянутых аппаратов с внешними устройствами, в которой используются четыре волоконно-оптических гироскопа (ВОГ) и четыре линейных акселерометра и блок электроники, расположенный в полости корпуса. Корпус имеет форму, приближенную к четырехгранной усеченной пирамиде, с внутренней полостью и гнездами для размещения волоконно-оптических гироскопов и акселерометров, при этом гироскопы и акселерометры закреплены таким образом, что их измерительные оси располагаются равномерно вдоль образующих кругового конуса, при этом система содержит четыре угловых акселерометра, каждый из которых расположен во внутренней полости корпуса под каждым из волоконно-оптических гироскопов и их оси чувствительности совпадают, а блок электроники содержит четыре канала приема и обработки информации и два блока сопряжения. Корпус навигационной системы выполнен в виде несущего кронштейна, имеющего форму, приближенную к четырехгранной усеченной пирамиде с внутренней полостью, при этом в боковых гранях корпуса выполнены гнезда для размещения гироскопов, угловых и линейных акселерометров, содержащие отверстия для крепления по одному гироскопу, одному угловому и одному линейному акселерометру на каждой боковой грани, при этом гнезда выполнены с возможностью закрепления гироскопов, угловых и линейных акселерометров таким образом, что их измерительные оси располагаются равномерно вдоль образующих кругового конуса (RU 2702845, с приоритетом от 16.10.2018, прототип).
Недостатком данной системы является то, что при воздействии тепла от работы блока электроники с источником напряжения возникают погрешности при работе гироскопа, т.к. оптическое волокно сильно подвержено деформациям, акселерометры расположены в одном объеме с источником тепла и электромагнитных излучений - блоком электроники. Одновременно воздействие тепла от работы блока электроники оказывает влияние на корпуса акселерометров, в результате происходит смещение осей чувствительности и, как следствие, потеря точности бесплатформенной инерциальной навигационной системы в целом. Так же большое значение отклонений осей чувствительности акселерометров может быть обусловлено воздействием внешних факторов из-за малой жесткости несущей конструкции.
Технической проблемой, разрешаемой с помощью заявляемого технического решения, является создание эффективной бесплатформенной инерциальной навигационной системы для систем навигации высокоточных летательных аппаратов, а также расширение арсенала бесплатформенных инерциальных навигационных систем.
Технический результат, обеспечивающий разрешение указанной проблемы заключается в повышении точности определения системой ускорений, скоростей, географических координат и параметров углового положения летательного аппарата в пространстве за счет сокращения погрешности отклонения осей чувствительности акселерометров, с одновременным увеличением конструктивной жесткости системы, упрощением конструкции несущих частей системы, улучшением компоновочных возможностей для выполнения монтажа и соединений с сопрягаемым оборудованием в составе летательного аппарата, и увеличением доступности аппаратуры для технического обслуживания.
Сущность изобретения состоит в том, что бесплатформенная инерциальная навигационная система содержит блок гироскопов, группу акселерометров и блок электроники с источником напряжения, размещенный на корпусе, связанном с основанием, на котором смонтирована монтажная рама, а также соединительные элементы для связи упомянутых аппаратов с внешними устройствами, при этом основание выполнено в виде панели с двумя рабочими сторонами, одна из которых сопряжена с блоком гироскопов, а другая - с корпусом и с монтажной рамой, снабженной с одной стороны структурой плоских граней, перпендикулярных панели основания и попарно пересекающихся между собой с образованием центрального монтажного колодца с установочными площадками, на которых закреплены акселерометры, а корпус блока электроники в части, обращенной к панели основания, выполнен полым, с изолированным отсеком, экранированным от проникновения в него электромагнитных излучений и выделяемого тепла от блока электроники, и охватывающим монтажную раму совместно с акселерометрами.
Предпочтительно, монтажная рама со структурой плоских граней выполнена монолитной, с образованием центрального монтажного колодца в форме прямоугольного параллелепипеда из попарно перпендикулярных друг другу плоских граней, сопряженного дном с панелью основания.
Предпочтительно, группа акселерометров выполнена с пятью акселерометрами, один из которых размещен на установочной площадке, выполненной на дне монтажного колодца, остальные четыре - попарно симметрично на установочных площадках, выполненных на наружных сторонах граней монтажного колодца.
Предпочтительно, каждое ребро параллелепипеда, образованное пересечением смежных граней центрального монтажного колодца, снабжено двумя взаимно перпендикулярными наружными ребрами жесткости, при этом четыре акселерометра, размещенные на наружных сторонах граней монтажного колодца, разделены между собой наружными ребрами жесткости.
Предпочтительно, наружные ребра жесткости монтажной рамы выполнены в форме треугольных пластин.
Предпочтительно, корпус блока электроники снабжен выступающими от изолированного отсека бортами с ребрами жесткости, а изолированный отсек корпуса блока электроники выполнен в форме расширенного к основанию усеченного полого конуса, охватывающего с зазором монтажную раму с акселерометрами.
Предпочтительно, материал и геометрические характеристики указанного изолированного отсека корпуса, а также основания и монтажной рамы выбраны из условия обеспечения экранирования акселерометров от электромагнитных излучений, а также их теплоэлектроизоляции и пылевлагозащищенности от окружающей среды.
Предпочтительно, основание и монтажная рама в выполнены заодно из алюминиевого сплава, а корпус блока электроники выполнен монолитным из теплоизоляционного материала, при этом блок гироскопов и корпус блока электроники соединены с основанием фланцевыми соединениями.
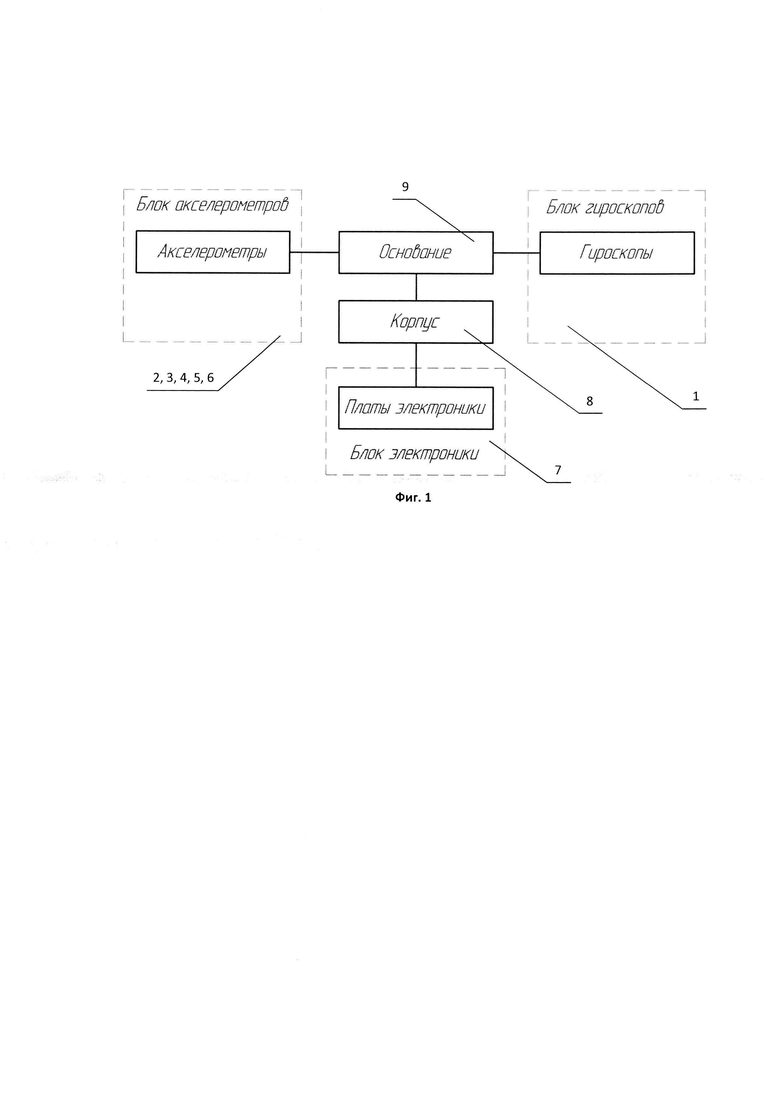
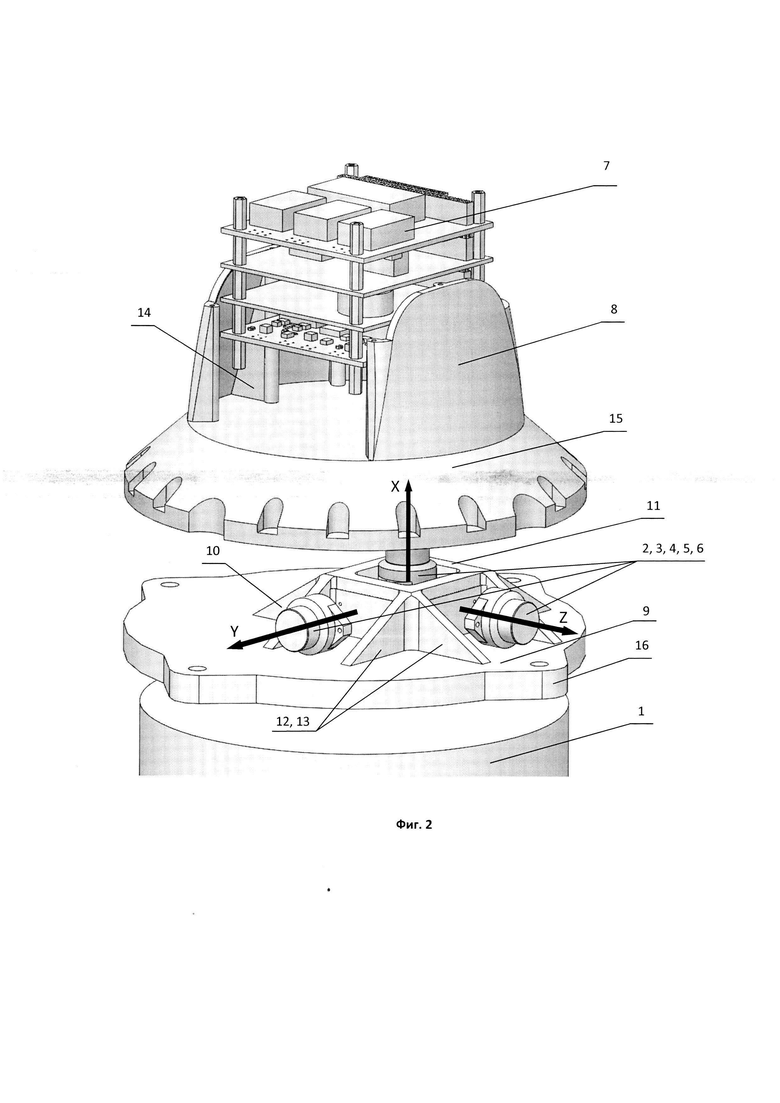
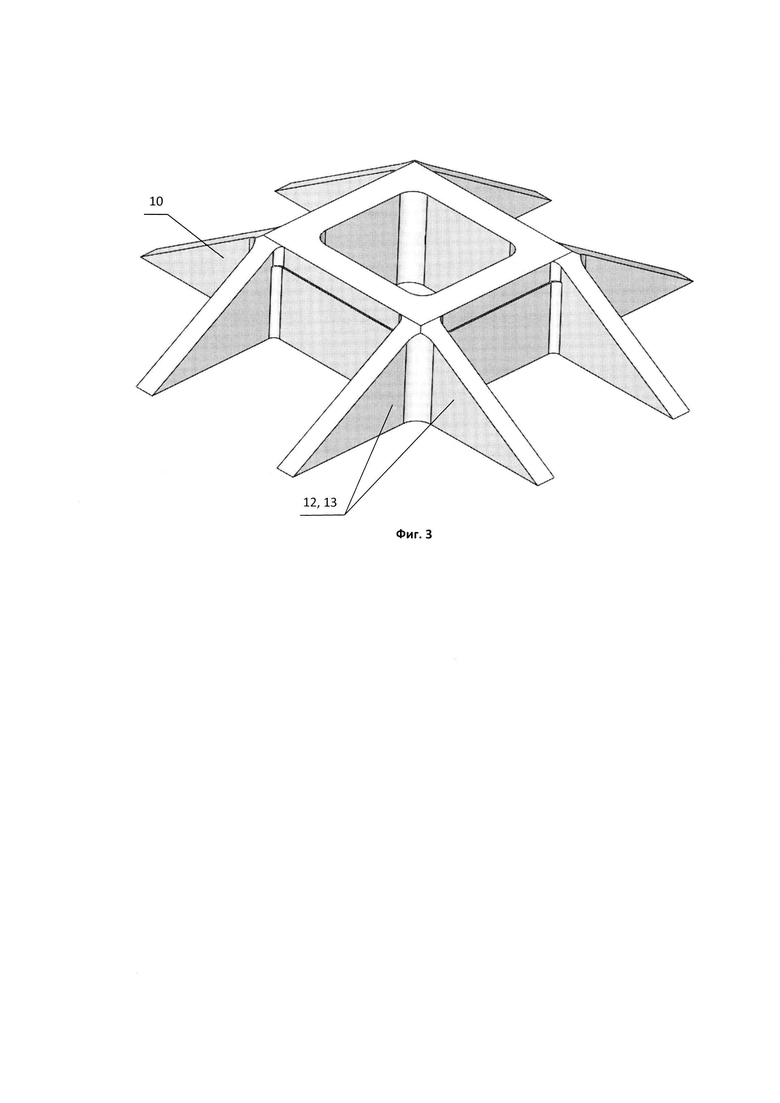
На чертеже фиг. 1 изображена блок-схема бесплатформенной инерциальной навигационной системы, на фиг. 2 - конструктивная монтажная схема системы по фиг. 1, на фиг. 3 - монтажная рама.
Бесплатформенная инерциальная навигационная система содержит блок 1, состоящий из трех кольцевых лазерных гироскопов, группу (блок) из пяти маятниковых акселерометров 2, 3, 4, 5, 6 и блок 7 электроники, состоящий из четырех плат электроники, с источником напряжения, как правило, большой рассеиваемой тепловой мощности, который является источником тепловой энергии.
Лазерные гироскопы блока 1 и акселерометры 2-6 совместно ориентированы в ортогональной связанной с объектом системе координат по осям XYZ для измерения абсолютных угловых скоростей и линейных ускорений соответственно.
Блок 7 электроники представляет собой аппаратно-программный блок, оснащенный вычислителем, и соединен с преобразователями выходных сигналов, входящих в состав блока 1 гироскопов и акселерометров 2-6, а также с соединительными элементами для связи с внешними устройствами (блок электронной вычислительной машины прибора бортовой электроники (ЭВМ ПБЭ), спутниковая навигационная система (СНС)).
Блок 7 электроники содержит плату модуля питания, которая обеспечивает формирование необходимых напряжений всех электронных элементов системы.
Блок 7 электроники содержит плату модуля аналого-цифрового преобразователя, с помощью которой происходит конвертация аналогово сигнала в цифровой от акселерометров 2-6.
Блок 7 электроники содержит плату модуля формирования синхронизирующих импульсов, которая позволяет синхронизировать данные с акселерометров 2-6 и гироскопов блока 1 по тактам времени.
Блок 7 электроники размещен на корпусе 8, связанном с основанием 9, на котором смонтирована монтажная рама 10, а также соединительные элементы для связи упомянутых аппаратов блока 7 с внешними устройствами, например, с ЭВМ ПБЭ, СНС, по стандартному USB-интерфейсу.
Основание 9 выполнено в виде панели с двумя плоскими рабочими сторонами, одна из которых сопряжена с блоком 1 гироскопов, а другая - с корпусом 8 блока 7 электроники и с монтажной рамой 10, снабженной с одной стороны структурой плоских граней, перпендикулярных плоскости панели основания 9 и попарно пересекающихся между собой с образованием центрального монтажного колодца 11 с установочными площадками, на которых закреплены акселерометры 2-6. Корпус 8 блока 7 электроники в части, обращенной к панели основания 9, выполнен полым, с изолированным отсеком, экранированным от проникновения в него электромагнитных излучений и выделяемого тепла от блока 7 электроники, и охватывающим монтажную раму 10 совместно с акселерометрами 2-6.
Монтажная рама 10 со структурой плоских граней выполнена монолитной, с образованием центрального монтажного колодца 11 в форме прямоугольного параллелепипеда из попарно перпендикулярных друг другу плоских граней, сопряженного дном с панелью основания 9.
Группа акселерометров выполнена с пятью акселерометрами 2-6, один из которых размещен на установочной площадке, выполненной на дне монтажного колодца 11, остальные четыре - попарно симметрично на установочных площадках, выполненных на наружных сторонах граней монтажного колодца 11.
Каждое ребро параллелепипеда, образованное пересечением смежных граней центрального монтажного колодца 11, снабжено двумя взаимно перпендикулярными наружными ребрами 12, 13 жесткости (на чертежах позициями обозначены два ребра жесткости из восьми). Четыре акселерометра 3-6, размещенные на наружных сторонах граней монтажного колодца 11, разделены между собой восемью наружными ребрами 12, 13 жесткости. Наружные ребра 12, 13 жесткости монтажной рамы 10 выполнены в форме треугольных пластин.
Ребра 12, 13 жесткости образуют со стенками центрального колодца равнопрочную структуру единой конструкции монтажной рамы 10. Благодаря этому обеспечена высокая механическая жесткость монтажной рамы 10, не требующей увеличения ее размеров. Все нагрузки в конструктивно едином устройстве БИНС замыкаются на основание 9.
Корпус 8 блока 7 электроники снабжен выступающими от изолированного отсека бортами с ребрами 14 жесткости. Изолированный отсек корпуса 8 выполнен в форме расширенного к основанию усеченного полого конуса 15, охватывающего с зазором монтажную раму 10 с акселерометрами 2-6.
Каждый гироскоп блока 1 и каждый акселерометр 2-6 находится в индивидуальном изолированном корпусе. Кроме того, блок 1 гироскопов также имеет общий корпус, который является защитным для всех трех гироскопов и защищен от воздействия электромагнитных излучений (ЭМИ).
Материал и геометрические характеристики указанного изолированного отсека усеченного полого конуса 15 корпуса 8, а также основания 9 и монтажной рамы 10 выбраны из условия обеспечения экранирования акселерометров 2-6 от электромагнитных излучений, а также их теплоэлектроизоляции и пылевлагозащищенности от воздействий окружающей среды.
Основание 9 и монтажная рама 10 в выполнены, предпочтительно, заодно из алюминиевого сплава Д16, обеспечивающего отвод тепла по периферии основания 9 в окружающее пространство. Корпус 8 блока 7 электроники выполнен монолитным из теплоизоляционного материала, при этом блок 1 гироскопов и корпус 8 блока 7 электроники соединены с основанием 9 фланцевыми соединениями 16.
Блок 1 гироскопов и акселерометры 2-6 связаны с цифровым вычислительным устройством летательного аппарата, например, бортовым компьютером, через блок 7 электроники.
Бесплатформенная инерциальная навигационная система работает следующим образом.
Работа заявляемого устройства основана на решении уравнения инерциальной навигации по полученным навигационным параметрам от источников информации - чувствительных элементов (ЧЭ) - маятниковых акселерометров 2-6 и лазерных гироскопов блока 1, действующих по осям XYZ чувствительности единой системы координат, связанной с летательным аппаратом системы координат.
При движении летательного аппарата каждый из гироскопов блока 1 измеряет проекцию вектора угловой скорости объекта на свою ось чувствительности. Одновременно каждый из маятниковых акселерометров 2-6 измеряет соответствующую проекцию вектора кажущегося линейного ускорения летательного аппарата на свою ось чувствительности. Сигналы с акселерометров 2-6 после обработки в плате аналого-цифрового преобразователя в блоке 7 электроники преобразуются в цифровую форму и одновременно с сигналами от гироскопов блока 1 по каналам связи передаются в вычислитель блока 7 электроники, который может быть реализован с использованием искусственного интеллекта (нейронной сети).
После сбора информации от гироскопов блока 1 и акселерометров 2-6 в блоке 7 электроники измерения приводятся в единую систему координат и осуществляется процессорная обработка данных по заранее составленному алгоритму, решение навигационного уравнения и решения задач навигации и ориентации, запись полученных и обработанных данных в буфер для формирования выходных данных для передачи в блок электронной вычислительной машины прибора бортовой электроники летательного аппарата.
Связь БИНС с внешними устройствами (ЭВМ ПБЭ, СНС) осуществляется в виде цифрового кода и разовых команд, формируемых и получаемых блоком 7 электроники, который обеспечивает функциональное единство всей аппаратуры БИНС в отношении совокупности навигационных параметров по осям XYZ системы координат в системе управления летательным аппаратом.
При этом обеспечивается синхронное преобразование информационных цифровых сигналов гироскопов блока 1 и аналоговых сигналов акселерометров 2-6 в цифровой код, а также формирование информационных сигналов и сигналов управления внешними устройствами в бортовой системе управления летательного аппарата. При этом блок 7 электроники осуществляет двухсторонний информационный обмен: формирует инерциальную информацию, управляет преобразователями сигналов гироскопов блока 1 и акселерометров 2-6, осуществляет встроенный контроль инерциальных подсистем и прием поступающей внешней информации от внешнего навигационного комплекса; осуществляет комплексную обработку инерциальной и спутниковой информации, а также контроль достоверности спутниковой информации. Источник напряжения блока 7 электроники обеспечивает формирование необходимых напряжений всех электронных элементов системы.
Навигационный алгоритм выбран таким образом, что на выходе блока 7 электроники снимается и передается в блок электронной вычислительной машины прибора бортовой электроники информация:
- о проекциях вектора абсолютной угловой скорости на оси чувствительности заявляемой системы;
- о проекциях вектора линейного ускорения на оси чувствительности заявляемой системы;
- о моментах времени, на которые сформирована информация;
- о компонентах кватерниона ориентации заявляемой системы.
Таким образом, в результате совместной алгоритмической обработки сигналов бесплатформенной инерциальной навигационной системы формируются сигналы, в которых содержится информация о параметрах ориентации и навигационных параметрах летательного аппарата, связанных условием обязательной совместной обработки и использования при управлении летательным аппаратом. Такими параметрами являются углы курса, крена, тангажа, скорость и пройденный путь.
Размещение акселерометров 2-6 на жесткой несущей монтажной раме 10 не допускает механического смещения площадок контакта акселерометров 2-6 и возникновения связанных с этих погрешностей измерений по осям чувствительности.
Одновременно расположение акселерометров 2-6 в изолированном отсеке корпуса 8, экранированном от проникновения в него электромагнитных излучений и выделяемого тепла от блока 7 электроники, а также их теплоэлектроизоляция и пылевлагозащищенность от окружающей среды, позволяет устранить температурные и иные деформации и, тем самым, минимизировать и даже практически исключить смещение осей чувствительности акселерометров и, как следствие, потерю точности бесплатформенной инерциальной навигационной системы в целом.
Таким образом, заявленная бесплатформенная инерциальная навигационная система позволяет достичь существенного уменьшения массогабаритных характеристик и обеспечить повышенную надежность и стойкость к внешним воздействиям, увеличить дальность/точность полета летательного аппарата.
Совокупность геометрических форм, связей и оптимального взаимного расположения аппаратуры и элементов конструкции обеспечивает устойчивую работу алгоритмов вычисления, высокую точность передаваемой в бортовую цифровую вычислительную машину информации, простоту и надежность конструкции, меньшую относительно прототипа себестоимость изготовления, а также требуемые характеристики на уровне мировых аналогов, но без применения трудоемких технологических процессов, специального инструмента или дорогостоящих металлов пониженной плотности. Простота форм и технологичность конструкции обеспечивают ее ремонтопригодность, а также существенно сокращают время подготовки к производству и снижают себестоимость. Конструкция системы имеет высокий модернизационный потенциал и предназначена для скорейшего внедрения в производство в связи с высокой потребностью в навигационных системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОБЪЕКТА УПРАВЛЕНИЯ | 2021 |
|
RU2771790C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2704198C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| РЕЗЕРВИРОВАННЫЙ АМОРТИЗИРОВАННЫЙ БЛОК ДАТЧИКОВ МАЛОГАБАРИТНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2778428C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
Изобретение относится к навигационным устройствам и может быть использовано для определения пилотажно-навигационных параметров движения, географических координат и параметров углового положения летательного аппарата в пространстве. Сущность: бесплатформенная инерциальная навигационная система содержит блок (1) гироскопов, группу акселерометров (2-6) и блок (7) электроники с источником напряжения, размещенный на корпусе (8). Корпус (8) связан с основанием (9), на котором смонтирована монтажная рама (10), а также соединительные элементы для связи с внешними устройствами. Основание (9) выполнено в виде панели с двумя рабочими сторонами, одна из которых сопряжена с блоком (1) гироскопов, а другая - с корпусом (8) и с монтажной рамой (10). Монтажная рама (10) с одной стороны снабжена структурой плоских граней, перпендикулярных панели основания и попарно пересекающихся между собой с образованием центрального монтажного колодца (11) с установочными площадками, на которых закреплены акселерометры (2-6). Корпус блока (7) электроники в части, обращенной к панели основания (9), выполнен полым, с изолированным отсеком, экранированным от проникновения в него электромагнитных излучений и выделяемого тепла от блока (7) электроники, и охватывающим монтажную раму (10) совместно с акселерометрами (2-6). Технический результат: повышение точности определения системой ускорений, скоростей, географических координат и параметров углового положения летательного аппарата в пространстве за счет сокращения погрешности отклонения осей чувствительности акселерометров, с одновременным увеличением конструктивной жесткости системы, упрощением конструкции несущих частей системы, улучшением компоновочных возможностей для выполнения монтажа и соединений с сопрягаемым оборудованием в составе летательного аппарата, и увеличением доступности аппаратуры для технического обслуживания. 7 з.п. ф-лы, 3 ил.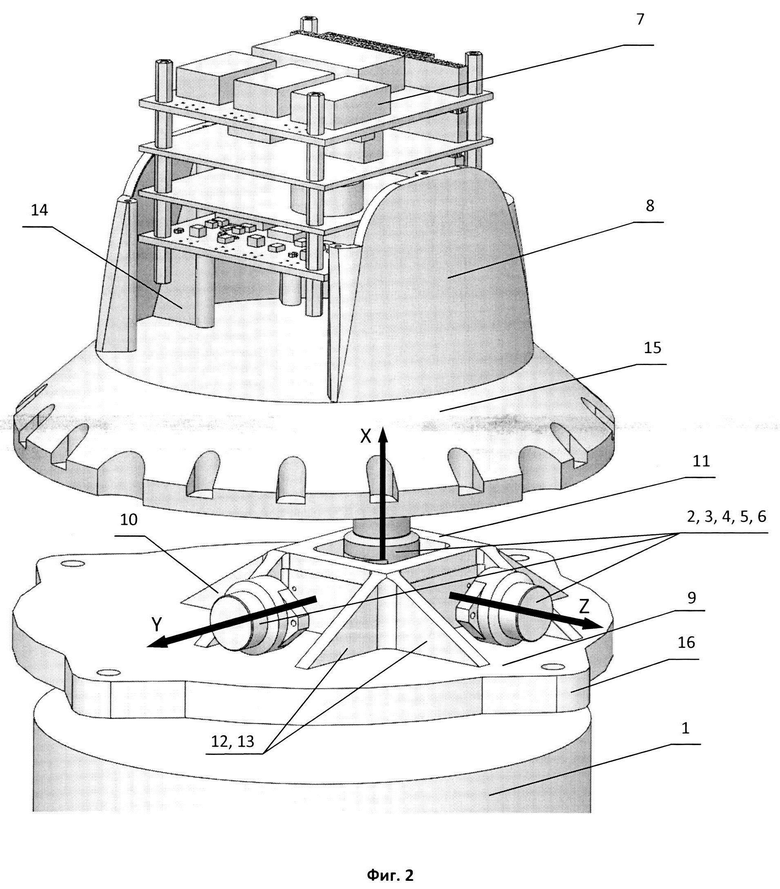
1. Бесплатформенная инерциальная навигационная система, содержащая блок гироскопов, группу акселерометров и блок электроники с источником напряжения, размещенный на корпусе, связанном с основанием, на котором смонтирована монтажная рама, а также соединительные элементы для связи с внешними устройствами, отличающаяся тем, что основание выполнено в виде панели с двумя рабочими сторонами, одна из которых сопряжена с блоком гироскопов, а другая - с корпусом и с монтажной рамой, снабженной с одной стороны структурой плоских граней, перпендикулярных панели основания и попарно пересекающихся между собой с образованием центрального монтажного колодца с установочными площадками, на которых закреплены акселерометры, а корпус блока электроники в части, обращенной к панели основания, выполнен полым, с изолированным отсеком, экранированным от проникновения в него электромагнитных излучений и выделяемого тепла от блока электроники, и охватывающим монтажную раму совместно с акселерометрами.
2. Навигационная система по п. 1, отличающаяся тем, что монтажная рама со структурой плоских граней выполнена монолитной, с образованием центрального монтажного колодца в форме прямоугольного параллелепипеда из попарно перпендикулярных друг другу плоских граней, сопряженного дном с панелью основания.
3. Навигационная система по п. 1 или 2, отличающаяся тем, что группа акселерометров выполнена с пятью акселерометрами, один из которых размещен на установочной площадке, выполненной на дне монтажного колодца, остальные четыре - попарно симметрично на установочных площадках, выполненных на наружных сторонах граней монтажного колодца.
4. Навигационная система по п. 2, отличающаяся тем, что каждое ребро параллелепипеда, образованное пересечением смежных граней центрального монтажного колодца, снабжено двумя взаимно перпендикулярными наружными ребрами жесткости, при этом четыре акселерометра, размещенные на наружных сторонах граней монтажного колодца, разделены между собой наружными ребрами жесткости.
5. Навигационная система по п. 4, отличающаяся тем, что наружные ребра жесткости монтажной рамы выполнены в форме треугольных пластин.
6. Навигационная система по п. 1 или 2, отличающаяся тем, что корпус блока электроники снабжен выступающими от изолированного отсека бортами с ребрами жесткости, а изолированный отсек выполнен в форме расширенного к основанию усеченного полого конуса, охватывающего с зазором монтажную раму с акселерометрами.
7. Навигационная система по п. 1 или 2, отличающаяся тем, что материал и геометрические характеристики указанного изолированного отсека корпуса, а также основания и монтажной рамы выбраны из условия обеспечения экранирования акселерометров от электромагнитных излучений, а также их теплоэлектроизоляции и пылевлагозащищенности от окружающей среды.
8. Навигационная система по п. 5, отличающаяся тем, что основание и монтажная рама выполнены заодно из алюминиевого сплава, а корпус блока электроники выполнен монолитным из теплоизоляционного материала, при этом блок гироскопов и корпус блока электроники соединены с основанием фланцевыми соединениями.
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| Машина для отделения скорлупы от ядра орехов и т.п. | 1938 |
|
SU75033A1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Способ измерения потерь энергии в обмотке ротора короткозамкнутого асинхронного двигателя | 1947 |
|
SU73475A1 |

