Область техники
Изобретение относится к моментным двигателям с ограниченным перемещением ротора. Основное применение - гальванометрические сканаторы с подвижным магнитом для лазерной маркировки.
Уровень техники
Известен моментный двигатель с четырех полюсным магнитным ротором и четырьмя обмотками в статоре [1]. Ротор двигателя выполнен из набора отдельных магнитов. Основной недостаток решения, большой момент инерции ротора и низкая эффективность использования магнитов. В решении [2] ротор выполнен в виде цельного явно полюсного магнита, что несколько лучше, чем ротор с неявно выраженными полюсами [3], однако не обладает достаточной концентрацией магнитного поля в сосредоточенном объеме воздушного зазора двигателя. Представленные решения не позволяют полностью использовать энергию магнитов и реализовать предельное быстродействие сканатора.
Наиболее близким является решение [4] (принято за прототип) в котором моментный двигатель гальванометрического сканатора реализован в виде сборки ротора из четырех магнитов и двух или четырех обмоточным магнитопроводом. В данном решении реализована высокоэффективная магнитная система, однако, для достаточно небольшого рабочего диапазона немного превышающим ±5° механического угла вращения ротора. При увеличении рабочего диапазона в данном решении снижается эффективность магнитной системы и жесткость ротора, т.к. приходится уменьшать угловой размер магнита, что приводит к снижению быстродействия сканатора.
Раскрытие изобретения
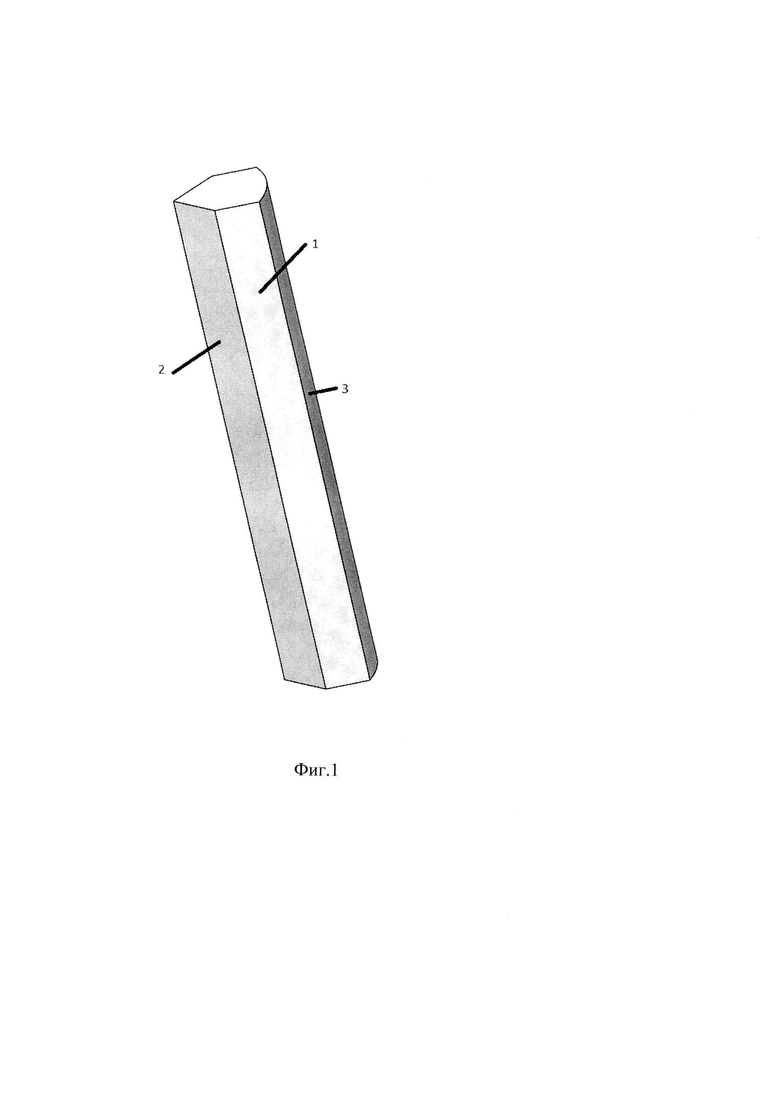
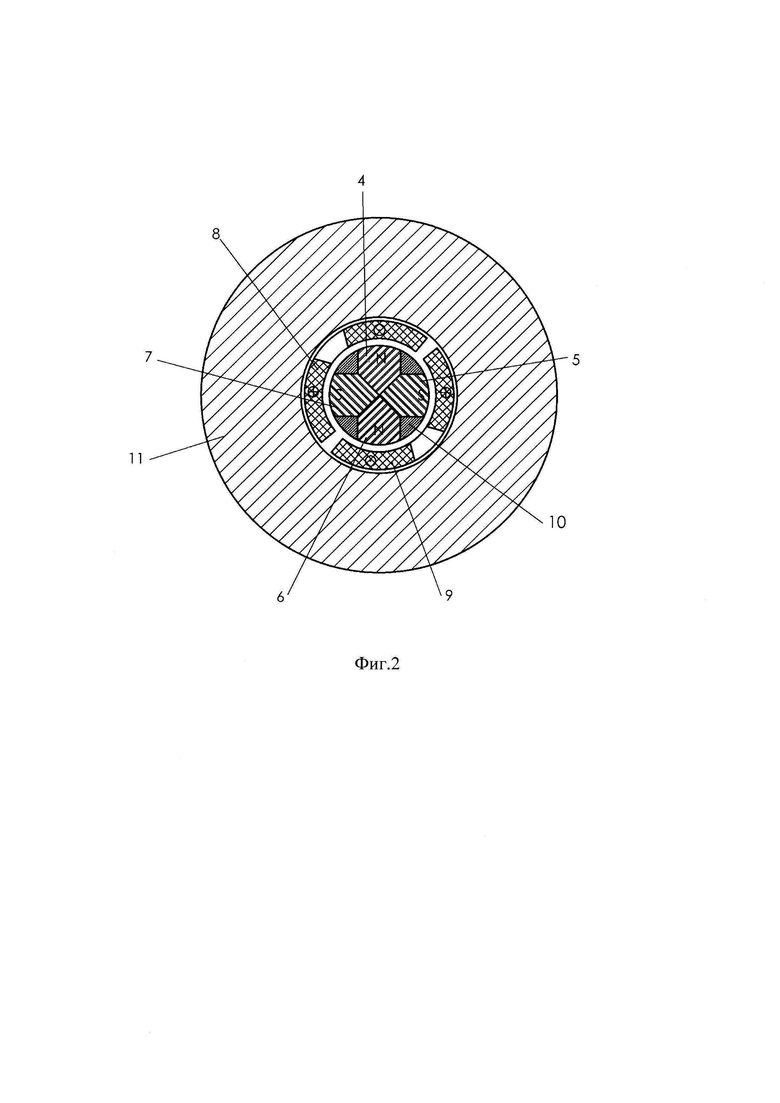
В предложенном решении магниты выполнены в виде протяженного бруска 1 (фиг. 1) одна длинная грань 2 которого выполнена в виде выпуклого угла 90°, а противоположная выпуклая цилиндрическая 3, торцы и две другие протяженные грани параллельны, установлены магниты 4, 5, 6, 7 (фиг. 2) парами в двух прямоугольных пазах ротора 10, расположенных ортогонально и ориентированы друг к другу гранями в виде выпуклого угла 90°, а выпуклые цилиндрические грани образуют полюса ротора, обмотки управления 8 и 9 (двух обмоточный вариант) расположены в воздушном зазоре между ротором 10 и магнитопроводом 11 и жестко соединены с ним, продольные витки обмоток управления расположены вдоль магнитопровода напротив соседних полюсов ротора. Это решение позволяет увеличить рабочий диапазон до значения ±15° механического перемещения, а также увеличить удельный момент вращения по сравнению с прототипом для аналогичного рабочего диапазона. Моментный двигатель с двумя обмотками по 100 витков и ротором диаметром 7 мм имеет удельный момент вращения 0.0124 N⋅m/A. Для аналогичных параметров прототип имеет удельный момент вращения 0.0099 N⋅m/A, что составляет увеличение для данного решения на 25%. Кроме того, увеличивается жесткость ротора для данного решения первый изгибной резонанс имеет частоту 8500 Гц, для прототипа -5200 Гц, что позволяет расширить полосу пропускания петли обратной связи сканатора и увеличить его быстродействие.
В соответствии с п. 2 формулы изобретения в магнитопроводе 11 с двумя обмотками управления 8 и 9 они расположены напротив друг друга, а витки длинных сторон каждой обмотки управления напротив соседних полюсов. Данное решение позволяет упростить изготовление обмоток управления.
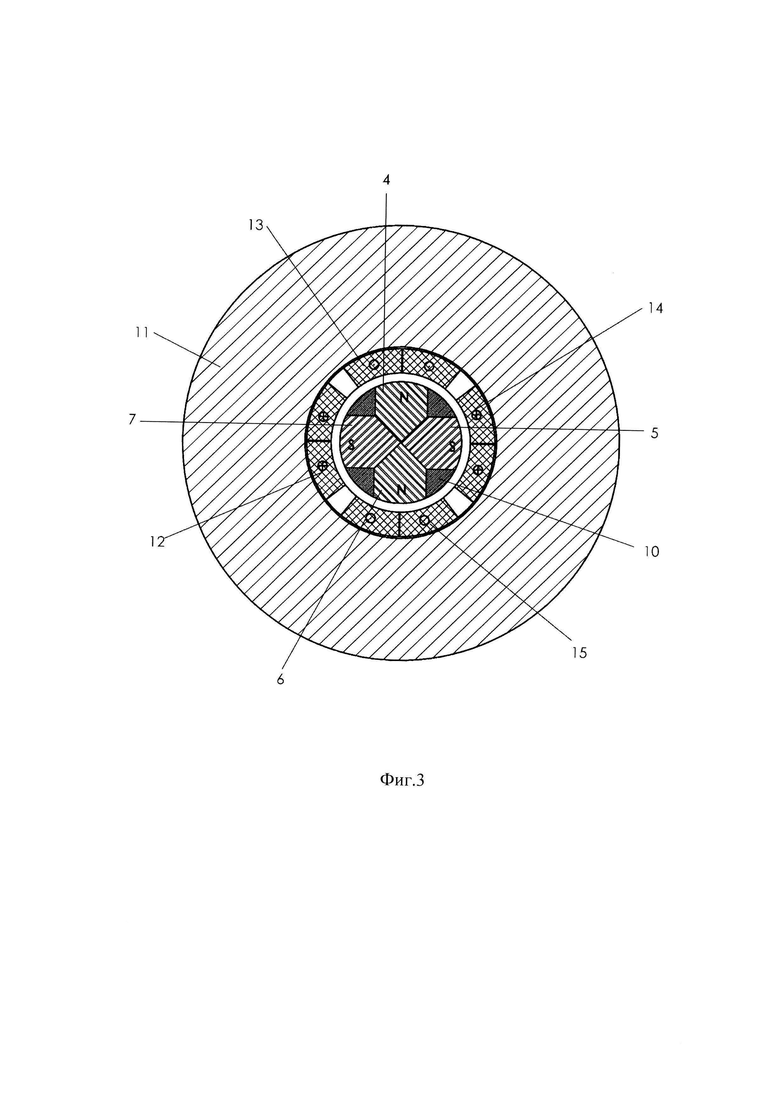
В соответствии с п. 3 в магнитопроводе с четырьмя обмотками управления 12, 13, 14, 15 (фиг. 3) они расположены по окружности магнитопровода 11 плотно прилегая друг к другу боковыми сторонами так, что соседние витки обмоток управления расположены симметрично напротив каждого полюса ротора 10, причем, токи в соседних обмотках управления ориентированы в одном направлении. Это решение позволяет более компактно установить обмотки управления в магнитопроводе и уменьшить длину ротора за счет уменьшения ширины короткой стороны обмотки, таким образом, снизить момент инерции ротора и увеличить его жесткость.
Описание чертежей
Фиг. 1 представлен магнит в виде параллелепипеда 1, где одна длинная грань 2 которого выполнена в виде выпуклого угла 90°, а противоположная выпуклая цилиндрическая 3
Фиг. 2 изображен моментный двигатель с двумя обмотками управления:
4, 5, 6, 7 - магниты
8, 9 - обмотки
10 - ротор
11 - магнитопровод
Фиг. 3 изображен моментный двигатель с четырьмя обмотками управления:
4, 5, 6, 7 - магниты
10 - ротор
11 - магнитопровод
12, 13, 14, 15-обмотки
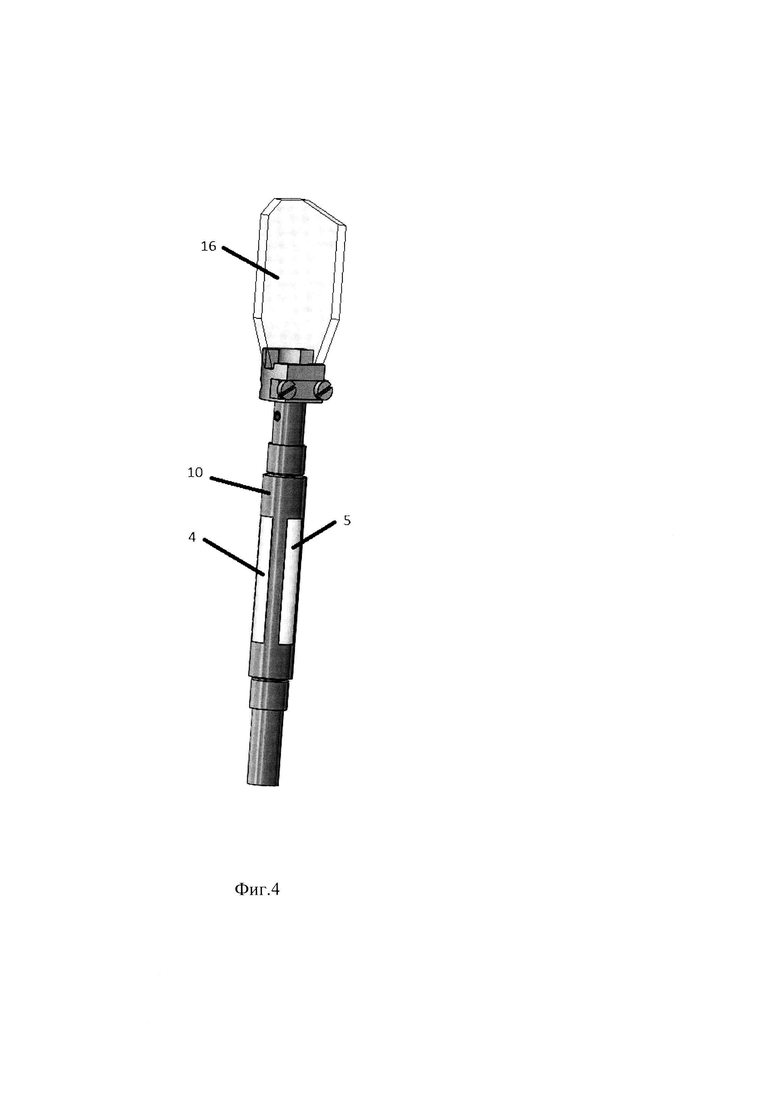
Фиг. 4 объемное изображение ротора в сборке:
4, 5 - магниты
10 - ротор
16 - зеркало
Осуществление изобретения
Конструкция моментного двигателя с двумя обмотками управления представлена на фиг. 2. магниты 4, 5, 6, 7 (фиг. 2) парами в двух прямоугольных пазах ротора 10, расположенных ортогонально и ориентированы друг к другу гранями 2 (фиг. 1) в виде выпуклого угла 90°, а выпуклые цилиндрические грани 3 образуют полюса ротора, обмотки управления 8 и 9 расположены в воздушном зазоре между ротором 10 и магнитопроводом 11, жестко соединены с ним клеем, витки длинных сторон обмоток управления расположены вдоль магнитопровода напротив полюсов ротора.
Конструкция моментного двигателя с четырьмя обмотками управления представлена на фиг. 3 ротор которого выполнен аналогично двух обмоточному варианту, а обмотки управления 12, 13, 14, 15 (фиг. 3) расположены по окружности магнитопровода 11 плотно прилегая друг к другу боковыми сторонами так, что соседние витки обмоток управления расположены симметрично напротив каждого полюса ротора 10, причем, токи в соседних обмотках управления ориентированы в одном направлении.
Работает устройство следующим образом: при протекании тока по обмоткам управления возникает момент вращения в одном направлении, приводящий к повороту ротора с постоянными магнитами, при изменении направления тока через обмотки управления меняется направление действующего момента и перемещение ротора с постоянными магнитами на противоположное.
Литература:
1. Столов Л.И., Афанасьев А.Ю. Моментные двигатели постоянного тока. - М: Энергоатомиздат, 1989, с. 25, рис. 2.1.
2. Столов Л.И., Афанасьев А.Ю. Моментные двигатели постоянного тока. - М.: Энергоатомиздат, 1989, с. 28, рис. 2.8а.
3. Столов Л.И., Афанасьев А.Ю. Моментные двигатели постоянного тока. - М.: Энергоатомиздат, 1989, с. 29, рис. 2.106.
4. US patent №6809451 "Galvanometer motor with composite rotor assembly" 14.07.2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2766317C1 |
| Линейный двигатель с подвижным магнитом | 2016 |
|
RU2648682C2 |
| МОМЕНТНЫЙ ПРЕЦИЗИОННЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2686686C1 |
| ИНДУКТИВНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2368868C1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2303536C2 |
| МНОГОСЛОЙНЫЙ ТОРЦЕВОЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2251784C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| БЕСКОЛЛЕКТОРНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ПОСТОЯННЫМИ МАГНИТАМИ | 2014 |
|
RU2565775C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ/РАЗМОТКИ СОЕДИНИТЕЛЬНОЙ ЛИНИИ | 2021 |
|
RU2837818C1 |
Изобретение относится к области электротехники. Технический результат заключается в увеличении рабочего диапазона до ±15° и повышении удельного момента вращения. Достигается тем, что ротор моментного двигателя выполнен с двумя прямоугольными пазами, расположенными ортогонально, в которых попарно установлены четыре магнита, обмотки управления размещены в воздушном зазоре между ротором и магнитной системой, длинные стороны которых сориентированы вдоль ротора напротив соседних полюсов, образованных магнитами. 2 з.п. ф-лы, 4 ил.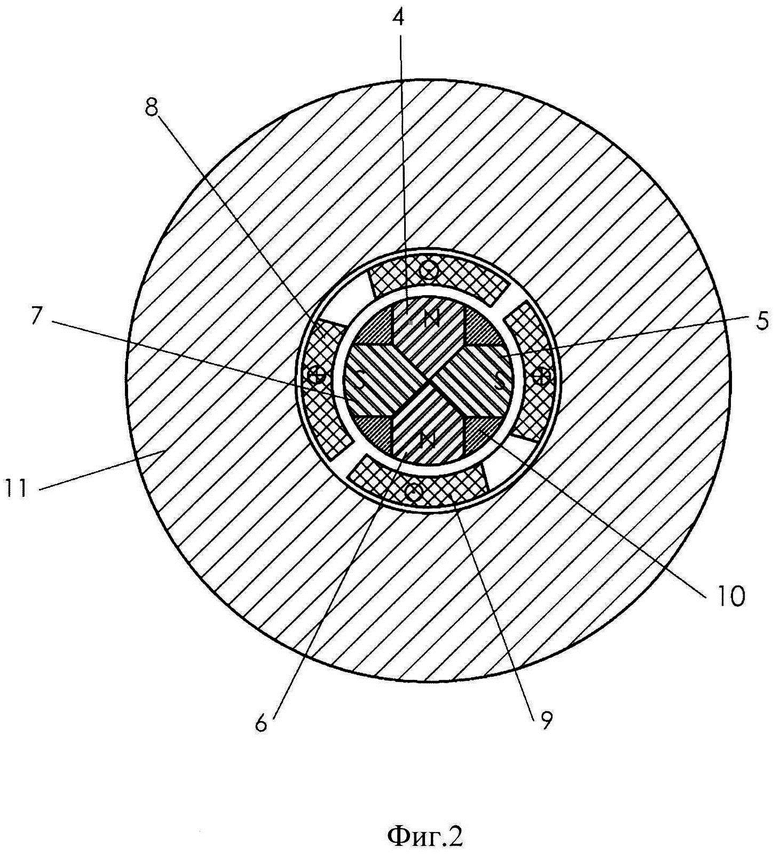
1. Моментный двигатель, включающий в себя магнитопровод с двумя или четырьмя обмотками управления и ротор в виде сборки с четырьмя магнитами, установленными парами ортогонально, в одной паре магнитов направление намагниченности встречное, а в другой противоположное, отличающийся тем, что магниты выполнены в виде протяженного бруска, две длинные грани и торцы которого параллельны, а две другие длинные грани выпуклые, одна в виде цилиндрической поверхности, другая выполнена в виде выпуклого угла 90°, установлены магниты парами в двух прямоугольных пазах ротора, расположенных ортогонально и ориентированных друг к другу гранями в виде выпуклого угла 90°, а выпуклые цилиндрические грани образуют полюса ротора, обмотки расположены в воздушном зазоре между ротором и магнитопроводом и жестко соединены с ним, витки обмоток расположены вдоль магнитопровода напротив полюсов ротора.
2. Моментный двигатель по п. 1, отличающийся тем, что в магнитопроводе с двумя обмотками они расположены напротив друг друга, а витки длинных сторон напротив соседних полюсов.
3. Моментный двигатель по п. 1, отличающийся тем, что в магнитопроводе с четырьмя обмотками они расположены по окружности магнитопровода, плотно прилегая друг к другу боковыми сторонами так, что соседние витки обмоток расположены симметрично напротив каждого полюса ротора, причем токи в соседних обмотках ориентированы в одном направлении.
| US 6809451 B1, 26.10.2004 | |||
| US 2019296626 A1, 26.09.2019 | |||
| МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2441310C1 |
| ВЕНТИЛЬНЫЙ МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2709471C1 |
| US 2006131965 A1, 22.06.2006 | |||
| Моментный электрический двигатель | 1988 |
|
SU1582289A1 |

