Изобретение относится к измерительной технике, преимущественно к измерению углового положения ротора гальванометрических сканаторов, используемых для лазерной маркировки и гравировки, также может использоваться для измерения углового положения объектов с ограниченным углом поворота.
Известны аналогичные устройства [1] для бесконтактного измерения ограниченного угла поворота объекта. Данное устройство выполнено с цилиндрическими полюсами и позволяет измерять угловое положение объекта в диапазоне 10-30°. Подобного типа конструкция измерительного индуктивного преобразователя обладает таким недостатком, как сложность изготовления цилиндрических поверхностей полюсов магнитопроводов катушек индуктивностей и подвижных сердечников, а также сложность изготовления и установки преобразователя на измеряемом объекте из-за сложности обеспечения соосности оси вращения подвижного сердечника, его цилиндрической поверхности и осей цилиндрических поверхностей полюсов П-образного магнитопровода. Кроме того, подвижная часть такого преобразователя (для дифференциального исполнения) будет иметь значительные габариты, а в случае уменьшения габаритов - снижение жесткости и линейности преобразователя.
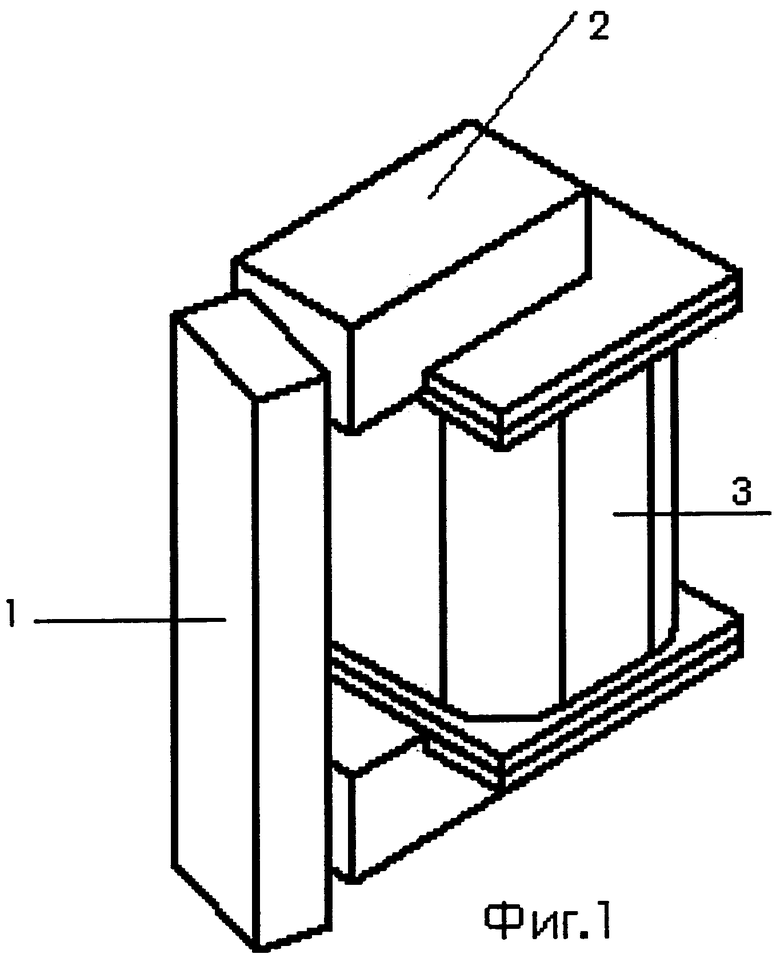
Сущность заявленного изобретения состоит в том, что обмотка катушки индуктивности намотана на П-образном магнитопроводе с плоскими полюсами, плоскость П-образного магнитопровода расположена вдоль оси вращения подвижного сердечника, а подвижный сердечник выполнен в виде прямоугольной пластины расположенной напротив полюсов П-образного магнитопровода, с возможностью вращения относительно оси, проходящей параллельно плоскости полюсов П-образного магнитопровода и лежащей в плоскости, проходящей через боковую поверхность П-образного магнитопровода в сторону от боковой поверхности П-образного магнитопровода к противоположной боковой поверхности П-образного магнитопровода (см. фиг.1, 2). Данная конструкция измерительного преобразователя значительно проще в изготовлении, т.к. плюса П-образного магнитопровода и подвижный сердечник выполнены плоскими. Хорошая линейность достигается тем, что воздушный зазор между П-образным магнитопроводом и подвижным сердечником изменяется не только по площади, а и по длине. Меньшая величина нелинейности функции преобразования достигается при измерении тока, вытекающего из обмотки катушки индуктивности, п.2 формулы изобретения.
На фиг.3 и 4 изображен измерительный преобразователь дифференциального типа. Выполнен дифференциальным путем введения второго подвижного сердечника в виде прямоугольной пластины 5, жестко соединенной с первой пластиной 1 с помощью не ферромагнитного элемента 4, расположенной симметрично относительно оси вращения и второй катушки индуктивности 6 с П-образным магнитопроводом, расположенной симметрично относительно оси вращения и повернутой на угол φ так, что между односторонними боковыми поверхностями П-образных магнитопроводов, проходящих через ось вращения, будет образован угол 180-φ.
На фиг.1 представлен общий вид индуктивного измерительного преобразователя одинарного типа, где подвижный сердечник 1 и П-образный магнитопровод 2 катушки индуктивности 3.
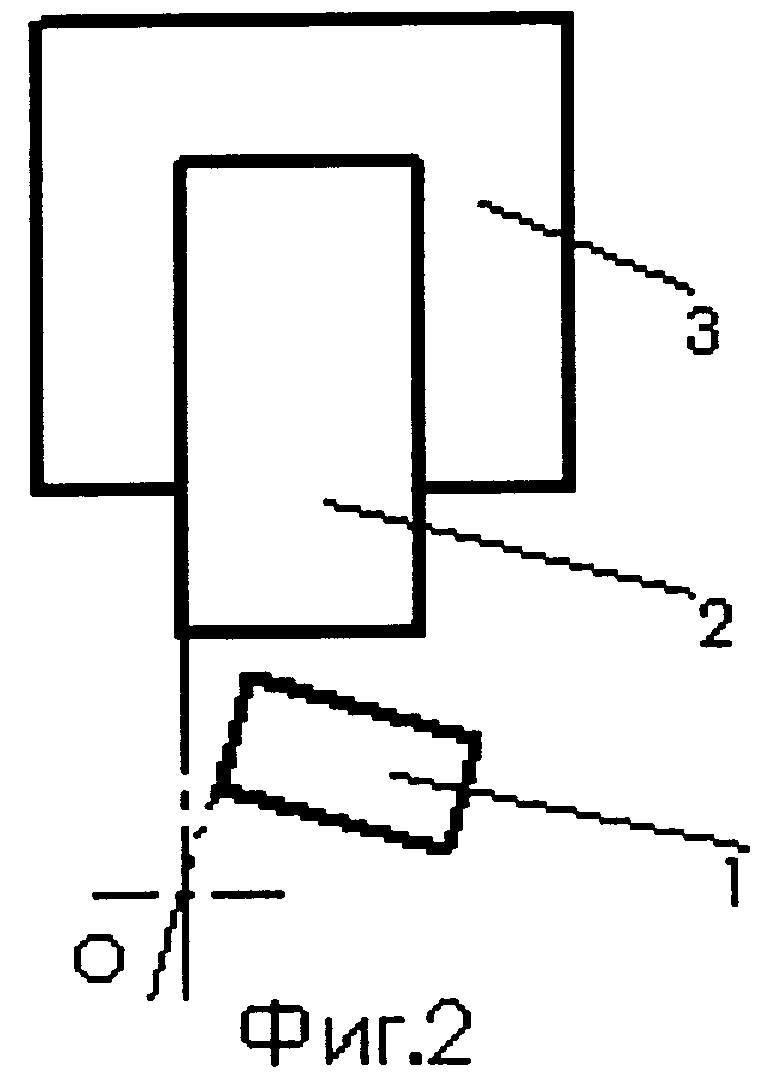
На фиг.2 показано положение оси вращения О, относительно которой поворачивается подвижный сердечник 1.
На фиг.3 показан общий вид индуктивного измерительного преобразователя дифференциального типа, где имеется вторая катушка индуктивности 6, второй подвижный сердечник 5, соединенный жестко с первым подвижным сердечником 1 с помощью неферромагнитного элемента 4.
На фиг.4 показано положение второй катушки индуктивности 6 относительно первой катушки индуктивности 3 и ось вращения подвижных сердечников 1 и 5.
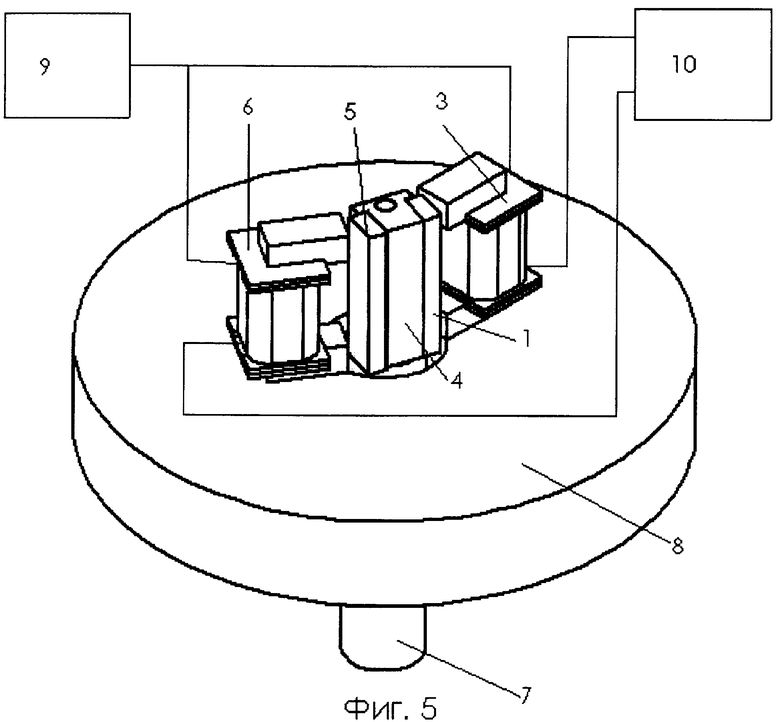
На фиг.5 представлен индуктивный измерительный преобразователь дифференциального типа, установленный на объект измерения, состоящий из неподвижного основания 8 и вращающегося вокруг своей оси ротора 7 с закрепленным на нем неферромагнитным элементом 4 с подвижными сердечниками 1 и 5.
Реализация дифференциального измерительного преобразователя осуществляется следующим образом. Подвижные сердечники 1 и 5, соединенные неферромагнитным элементом 4, устанавливаются на подвижный ротор 7 объекта измерения, так, чтобы совпадали их оси вращения. Катушки индуктивности измерительного преобразователя жестко крепятся на неподвижное основание 8 объекта измерения согласно фиг.5. Обмотки катушек индуктивности одними концами соединяются с источником синусоидального напряжения 9, с других концов обмоток регистрируется разность вытекающих токов устройством 10, которая пропорциональна углу поворота ротора 7 объекта измерения. Для площади полюсов П-образных магнитопроводов 3×4 мм, размерах подвижных сердечников 2×4×16 мм, начальном воздушном зазоре 0.6 мм, угле поворота ротора 7±10° и φ=26° нелинейность функции преобразования измерительного преобразователя может быть достигнута менее 0.1%.
Работает устройство следующим образом. При повороте ротора 7 объекта измерения относительно основания 8 поворачиваются подвижные сердечники 1 и 5 относительно соответствующих катушек индуктивности 3 и 6 так, что проводимости воздушных зазоров между соответствующими катушками индуктивности и подвижными сердечниками изменяются с противоположными значениями (одна растет, другая убывает). Изменение проводимостей воздушных зазоров приводит к изменению значений реакитвных сопротивлений катушек индуктивностей, а это, в свою очередь, к изменению протекающих через них токов с противоположным знаком. Полученная разность токов пропорциональна углу поворота ротора 7.
Литература
1. Электрические измерения. Средства и методы измерений. Под редакцией Е.Г.Шрамкова. Издательство «Высшая школа», Москва, 1972, с.176, таблица 9.1, рис.2а
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь ускорений | 1981 |
|
SU1078337A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ К ДЕФЕКТОСКОПУ | 1995 |
|
RU2085931C1 |
| ДАТЧИК СКОРОСТИ | 2006 |
|
RU2327171C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2007 |
|
RU2401461C2 |
| Индуктивный датчик микроперемещений ротора активного магнитного подвеса | 2024 |
|
RU2834196C1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1696850A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 1993 |
|
RU2063025C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2396675C1 |
Изобретение относится к измерительной технике и может быть использовано, преимущественно, для измерения углового положения ротора гальванометрических сканаторов для лазерной маркировки и гравировки, а также для измерения углового положения объектов с ограниченным углом поворота. Сущность: преобразователь выполнен в виде катушки индуктивности с П-образным магнитопроводом с плоскими полюсами, замкнутым через воздушный зазор подвижным сердечником. Сердечник выполнен в виде прямоугольной пластины. Ось вращения подвижного сердечника параллельна плоскости полюсов П-образного магнитопровода и лежит в плоскости, проходящей через боковую поверхность П-образного магнитопровода. Технический результат: упрощение изготовления, хорошая линейность функции преобразования. 3 з.п. ф-лы, 5 ил.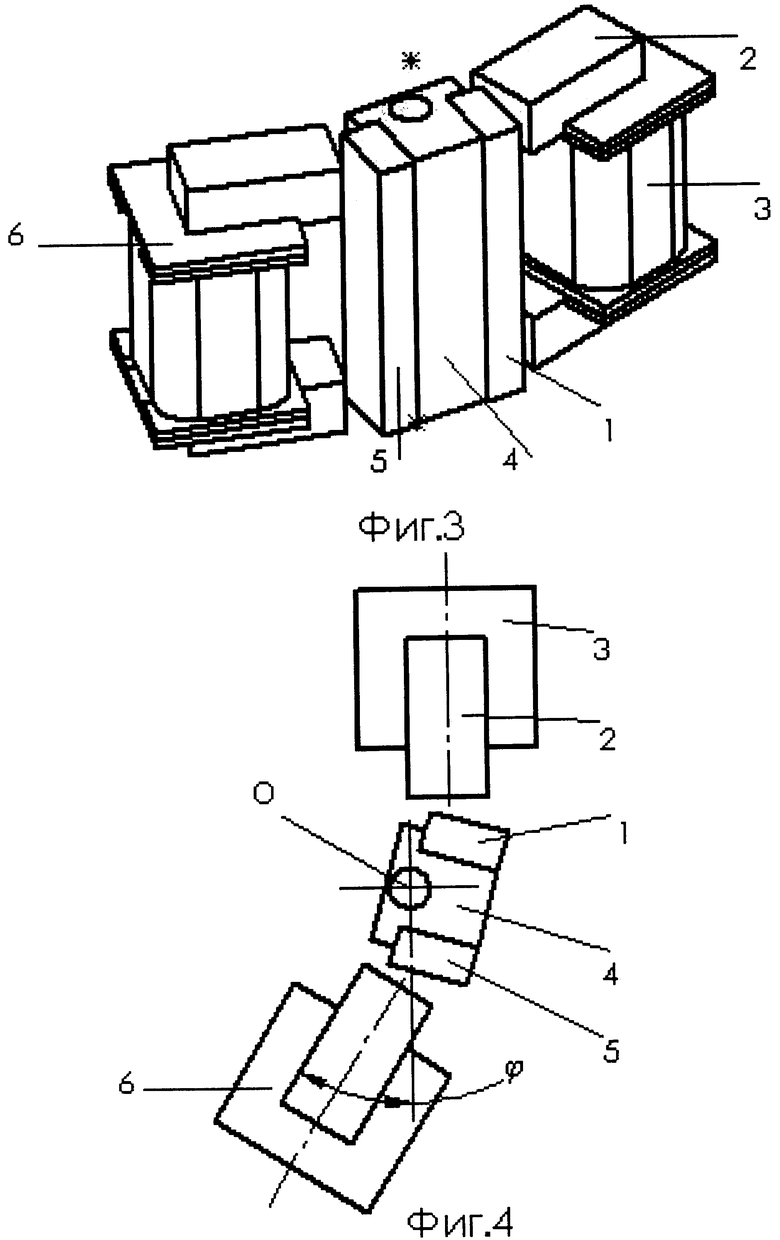
1. Индуктивный измерительный преобразователь углового перемещения, содержащий катушку индуктивности с магнитопроводом прямоугольного сечения и подвижный сердечник с возможностью вращения относительно заданной оси, замыкающий через воздушный зазор магнитопровод катушки индуктивности, отличающийся тем, что магнитопровод катушки индуктивности выполнен П-образным с плоскими полюсами, а подвижный сердечник - в виде прямоугольной пластины, расположенной напротив полюсов П-образного магнитопровода, с возможностью вращения относительно оси, проходящей параллельно плоскости полюсов П-образного магнитопровода и лежащей в плоскости, проходящей через боковую поверхность П-образного магнитопровода, в сторону от боковой поверхности П-образного магнитопровода к противоположной боковой поверхности П-образного магнитопровода.
2. Индуктивный измерительный преобразователь углового перемещения по п.1, отличающийся тем, что выполнен дифференциальным, путем введения второго подвижного сердечника в виде прямоугольной пластины, жестко соединенной с первой пластиной с помощью неферромагнитного элемента, расположенной симметрично относительно оси вращения и второй катушки индуктивности с П-образным магнитопроводом, расположенной симметрично относительно оси вращения и повернутой на угол φ так, что между односторонними боковыми поверхностями П-образных магнитопроводов, проходящих через ось вращения, будет образован угол I80-φ.
3. Индуктивный измерительный преобразователь углового перемещения по п.1, отличающийся тем, что выходным параметром преобразователя является ток, вытекающий из обмотки катушки индуктивности.
4. Индуктивный измерительный преобразователь углового перемещения по п.2, отличающийся тем, что выходным параметром преобразователя является разность токов, вытекающих из катушек индуктивности.
| Дифференциальный индуктивный датчик микроперемещений | 1990 |
|
SU1747869A1 |
| Преобразователь угловых перемещений | 1980 |
|
SU922495A1 |
| Индуктивный датчик перемещений | 1974 |
|
SU519594A1 |
| DE 4040932 A1, 27.02.1992 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

