ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе ультразвукового детектирования в устройстве для обработки просеиваемого материала, например, материала, подаваемого на грохот, такого как щебень, руда или тому подобное. Изобретение также относится к способу контроля работы устройства для обработки просеиваемого материала.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Минеральный материал, например, горная порода, добывается из земли для дробления путем взрыва или выкапывания. Горная порода также может представлять собой природную породу и гравий или строительные отходы. При дроблении используются мобильные дробилки и стационарные дробилки. Экскаватор или колесный погрузчик обычно загружает материал, подлежащий дроблению, в загрузочный бункер дробилки, откуда измельчаемый материал может падать в зев дробилки или питателя, который, подобно конвейеру, перемещает горный материал к дробилке. Материал, подлежащий измельчению, также может быть материалом, пригодным для вторичной переработки, таким как бетон, кирпич или асфальт.
Другой распространенный способ подачи материала в установку - через желоб, что имеет преимущество по сравнению с предоставлением материалу возможности свободно падать, так как большое количество пыли, которое могло бы возникнуть в противном случае, будет уменьшено. Более того, свободное падение не будет создавать материал в потоке. В телескопическом желобе падающий материал создает в желобе давление ниже атмосферного, в результате чего воздух попадает в пространство между элементами желоба и предотвращается распространение пыли.
Материал, который измельчается в дробилке, в конце концов транспортируется из дробилки на грохот. Продукт, проходящий через грохот или проходящий через деку грохота, может направляться на дальнейшую переработку на том же заводе или на другом заводе, где перерабатывается минеральный материал, или в отвал.
При обработке материала на заводе может возникнуть ряд проблем, такие как накопление материала, перегрузка грохота, изношенные элементы грохота и застревание материала слишком большого размера во время транспортировки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы минимизировать, уменьшить или устранить один или несколько из указанных выше недостатков в данной области техники и недостатков по отдельности или в любой комбинации и решить по меньшей мере вышеупомянутые проблемы.
В соответствии с первым аспектом эти и другие цели и/или преимущества, которые будут очевидны из последующего описания вариантов выполнения, достигаются полностью или по меньшей мере частично системой ультразвукового детектирования в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Устройство содержит деку грохота и/или желоб грохота, по которому перемещается просеиваемый материал.
Система ультразвукового детектирования содержит ультразвуковой передатчик, установленный в устройстве и выполненный с возможностью отправки ультразвукового сигнала к поверхности, ультразвуковой приемник, выполненный с возможностью приема ультразвукового сигнала, и блок управления, соединенный с ультразвуковым передатчиком и ультразвуковым приемником. Блок управления выполнен с возможностью определения по меньшей мере одного параметра ультразвукового сигнала.
Термин «просеиваемый материал» следует понимать как материал, предназначенный для просеивания, транспортировки или обработки. Материал может быть щебнем, рудой или тому подобным.
После этого по меньшей мере один параметр может быть использован для того, чтобы сделать выводы, касающиеся рабочего состояния устройства.
Преимущество этого состоит в том, что любые потенциальные проблемы в работе устройства могут быть обнаружены простым и надежным способом. Решение также экономически выгодно по сравнению с решениями, доступными сегодня на рынке.
Блок управления может быть выполнен с возможностью определения различия в указанном по меньшей мере одном параметре на основе сравнения ультразвукового сигнала и опорного сигнала.
Когда в качестве параметра сравнения используется период времени, блок управления определяет период времени, который требуется для прохождения ультразвукового сигнала к поверхности устройства или к просеиваемому материалу, находящемуся на поверхности, и обратно к ультразвуковому приемнику. Этот период времени может затем быть сравнен с соответствующим периодом времени опорного сигнала.
В частности, определенный период времени можно, например, сравнить с расчетным периодом времени, сохраненным в блоке управления или считанным из таблицы. Кроме того, его также можно сравнить с определенным периодом времени опорного сигнала, который осуществляется таким же образом, как описано выше, когда устройство работает без нагрузки, т.е. при идеальных условиях. В случае если устройство содержит грохот, блок управления может быть выполнен с возможностью измерения амплитуды вибрирующей деки грохота и установить ее в качестве опорного значения. В случае если различие между периодами времени ультразвукового сигнала и опорного сигнала отклоняется более чем на заданную величину ошибки, можно сделать вывод о том, что в устройстве имеется ошибка регулирования, потенциально указывающая на проблему.
Ультразвуковой передатчик может быть расположен близко к краю устройства. Ультразвуковой передатчик может быть также расположен на любой другой части устройства, например, в любом месте на деке грохота, или сбоку, позади или под декой грохота или между смежными деками грохота. Устройство может содержать грохот. Ультразвуковой передатчик может быть расположен у деки грохота рядом с разгрузочным концом деки грохота. Преимуществом может являться детектирование ультразвукового сигнала непосредственно перед тем, как материал упадет с деки грохота.
Система ультразвукового детектирования может дополнительно содержать средство очистки, соединенное с блоком управления и расположенное у одного ультразвукового передатчика и ультразвукового приемника, при этом блок управления выполнен с возможностью управления процессом очистки ультразвукового передатчика и/или ультразвукового приемника с использованием средства очистки.
В соответствии с альтернативными вариантами выполнения, система ультразвукового детектирования также содержит средство очистки, соединенное с дополнительным блоком управления и расположенное у ультразвукового передатчика и ультразвукового приемника, причем указанный дополнительный блок управления выполнен с возможностью управления процессом очистки ультразвукового передатчика и/или ультразвукового приемника с использованием средства очистки. Использование отдельных блоков управления для управления ультразвуковым передатчиком / приемником и средством очистки может иметь преимущество, поскольку оно позволяет создать более легкую и более гибкую систему, повышающую простоту индивидуализации.
Блок управления может быть выполнен с возможностью создания сообщения об обнаружении проблемы, если различие по меньшей мере в одном параметре находится вне допустимого интервала. Это подразумевает, что блок управления может быть выполнен с возможностью создания сообщения об обнаружении проблемы, если различие по меньшей мере в одном параметре превышает пороговое значение. Это может также означать, что блок управления может быть выполнен с возможностью создания сообщения об обнаружении проблемы, если различие по меньшей мере в одном параметре ниже порогового значения.
Система ультразвукового детектирования может также содержать защитный корпус, по меньшей мере частично содержащий ультразвуковой передатчик и ультразвуковой приемник.
Защитный корпус может быть наклонен относительно поверхности устройства, а средство очистки может содержать средство продувки воздухом.
Ультразвуковой передатчик, или ультразвуковой приемник, или они оба могут содержать пьезоэлемент.
Ультразвуковой передатчик и ультразвуковой приемник могут представлять собой один единственный элемент, причем указанный единственный элемент содержит пьезоэлемент.
Ультразвуковой передатчик и ультразвуковой приемник могут быть расположены у указанного устройства обращенными друг к другу так, чтобы они были расположены напротив друг друга.
Указанный по меньшей мере один параметр представляет собой период времени, частоту ультразвукового сигнала и/или амплитуду ультразвукового сигнала.
Параметр, который подлежит анализу блоком управления, может представлять собой период времени, который требуется для прохождения ультразвукового сигнала от ультразвукового передатчика к поверхности расположения материала, находящимся на поверхности, и обратно к ультразвуковому приемнику. Он также может представлять собой фактическую частоту или амплитуду ультразвукового сигнала, а также комбинацию всего вышеперечисленного.
Опорный сигнал может представлять собой заранее заданный сигнал, который, например, считывается из таблицы, основываясь на просеиваемом материале, находящимся на грохоте, когда послан ультразвуковой сигнал. Он также может представлять собой фактическое измерение, проведенное таким же образом, как описано выше, но на более ранней или более поздней стадии.
Устройство может содержать установку, грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
В соответствии со вторым аспектом, эти и другие цели достигаются, полностью или по меньшей мере частично, грохотом для просеивания материала, например, минеральной массы, руды или тому подобного, причем указанный грохот имеет раму и элементы, расположенные на раме грохота, и содержит самоочищающуюся систему детектирования, выполненную в соответствии с первым аспектом изобретения.
В соответствии с третьим аспектом, эти и другие цели достигаются, полностью или по меньшей мере частично, способом контроля работы устройства для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Способ включает этапы отправки ультразвукового сигнала от ультразвукового передатчика к поверхности устройства, приема ультразвукового сигнала ультразвуковым приемником и определения по меньшей мере одного параметра ультразвукового сигнала.
Способ может также включать этап сравнения ультразвукового сигнала с опорным сигналом на основе по меньшей мере одного параметра и выполнения конкретного действия, если различие в указанном по меньшей мере одном параметре между ультразвуковым сигналом и опорным сигналом находится за пределами допустимого интервала.
Технические результаты и признаки второго и третьего аспектов настоящего изобретения в значительной степени аналогичны тем, которые описаны выше в связи с первым аспектом изобретения. Варианты выполнения, упомянутые в отношении первого аспекта настоящего изобретения, в значительной степени совместимы с дополнительными аспектами изобретения.
В соответствии с другим аспектом, предложена система детектирования очистки в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Система детектирования очистки содержит по меньшей мере один ультразвуковой передатчик, расположенный у поверхности указанного устройства и выполненный с возможностью отправки ультразвукового сигнала к указанной поверхности, по меньшей мере один ультразвуковой приемник, расположенный у указанной поверхности и выполненный с возможностью приема ультразвукового сигнала, и защитный корпус, который, по меньшей мере частично, содержит указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник. Система детектирования очистки отличается тем, что она также содержит блок управления, соединенный с указанным по меньшей мере одним ультразвуковым передатчиком и с указанным по меньшей мере одним ультразвуковым приемником и выполненный с возможностью определения различия по меньшей мере в одном параметре на основе сравнения ультразвукового сигнала и опорного сигнала.
Система детектирования очистки может также содержать средство очистки, расположенное у защитного корпуса, причем средство очистки, в свою очередь, может содержать средство продувки воздухом, выполненное с возможностью очистки защитного корпуса.
Блок управления может быть выполнен с возможностью управления средством очистки. Например, блок управления может быть выполнен с возможностью активации средства продувки воздухом через определенные промежутки времени. В качестве альтернативы, для непрерывной работы блок управления может быть выполнен с возможностью активации и управления средством нагнетания воздуха.
Блок управления может содержать более одного подблока управления. Например, первый подблок управления может быть выполнен с возможностью управления средством очистки, а второй подблок управления может быть выполнен с возможностью управления ультразвуковым передатчиком и ультразвуковым приемником. Подблоки управления могут быть соединены друг с другом, но, в качестве альтернативы, подблоки управления могут работать независимо друг от друга. Система детектирования очистки может выполнять активную проверку на наличие грязи и, в случае обнаружения грязи, средство очистки может быть активировано для очистки системы.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут представлять собой один единственный элемент, при этом указанный единственный элемент содержит пьезоэлемент.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут быть расположены в одном блоке.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут быть расположены в устройстве обращенными друг к другу так, чтобы они находились напротив друг друга.
Сигнал может быть отправлен в направлении, по существу перпендикулярном поверхности устройства.
Сигнал может быть отправлен в направлении, образующем наклонный угол с поверхностью устройства.
Угол может быть регулируемым для обеспечения возможности оптимизации системы.
Указанный по меньшей мере один параметр может представлять собой период времени, частоту ультразвукового сигнала и/или амплитуду ультразвукового сигнала.
Блок управления может быть выполнен с возможностью создания уведомления об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
Блок управления может быть также соединен со средством очистки и может быть выполнен с возможностью инициирования очистки защитного корпуса с помощью средства очистки через заранее заданные интервалы времени.
Устройство может содержать установку, грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
В соответствии с еще одним аспектом, предложен способ определения потребности в очистке устройства для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Способ включает этапы отправки ультразвукового сигнала к поверхности устройства и приема ультразвукового сигнала. Способ отличается этапом определения различия в по меньшей мере одном параметре на основе сравнения ультразвукового сигнала и опорного сигнала.
Способ может также включать этап выполнения конкретного действия, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
В соответствии с еще одним аспектом, предложена система детектирования в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Система детектирования содержит два или большее количество ультразвуковых передатчиков, расположенных в разных местах устройства, причем каждый передатчик выполнен с возможностью отправки ультразвукового сигнала к поверхности устройства, и два или большее количество ультразвуковых приемников, каждый из которых выполнен с возможностью приема соответствующего ультразвукового сигнала. Система детектирования отличается тем, что она также содержит блок управления, соединенный с ультразвуковыми передатчиками и с указанными двумя или большим количеством ультразвуковых приемников и выполненный с возможностью определения различия в по меньшей мере одном параметре на основе сравнения ультразвуковых сигналов и опорного сигнала.
Путем сравнения параметров ультразвуковых сигналов можно оценить информацию, касающуюся, например, распределения материала по поверхности грохота.
В соответствии с одним вариантом выполнения, ультразвуковой передатчик и ультразвуковой приемник содержатся в одном единственном блоке, называемым блоком ультразвукового детектирования. Таким образом, обеспечивается система детектирования в устройстве, содержащем два или большее количество блоков ультразвукового детектирования.
В соответствии с одним вариантом выполнения, система детектирования содержит два ультразвуковых блока. Два ультразвуковых блока могут быть расположены в разных местах устройства, например, вдоль продолжения деки грохота. В качестве примера, первый ультразвуковой блок может быть расположен у первой стороны деки грохота, тогда как второй ультразвуковой блок может быть расположен параллельно первому ультразвуковому блоку у второй стороны деки грохота. С помощью блока управления, соединенного с системой контроля, поток материала с каждой из первой и второй сторон деки грохота может контролироваться и оцениваться с указанием распределения материала.
В соответствии с одним вариантом выполнения, система детектирования содержит решетку, содержащую по меньшей мере шесть ультразвуковых передатчиков и шесть ультразвуковых приемников, распределенных по поверхности деки грохота устройства. Путем размещения решетки, содержащей множество ультразвуковых передатчиков и ультразвуковых приемников или блоков ультразвукового детектирования, распределенных по поверхности деки грохота, поток материала на ней может оцениваться и контролироваться на большей площади. Это обеспечивает возможность детектирования на ранней стадии аномалии, такой как наклон грохота или неравномерное распределение материала и, тем самым, обеспечивает возможность устранения такой аномалии на ранней стадии. Таким образом, эффективность работы просеивающего устройства увеличивается.
В соответствии с одним вариантом выполнения, система детектирования содержит подвижную конструкцию, на которой размещены один или несколько ультразвуковых блоков. Подвижную конструкцию можно использовать для перемещения ультразвукового блока в соответствии с закономерностью, предпочтительно в соответствии с заранее заданной закономерностью так, что может быть покрыта вся поверхность деки грохота или по меньшей мере ее предпочтительные части.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут представлять собой один единственный элемент, при этом указанный единственный элемент содержит пьезоэлемент.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут быть расположены в устройстве обращенными друг к другу так, чтобы находиться напротив друг друга.
Сигнал может отправляться в направлении, по существу перпендикулярном поверхности устройства.
Сигнал может отправляться в направлении, образующем с поверхностью устройства наклонный угол.
Угол может быть регулируемым, чтобы обеспечить возможность оптимизации системы.
Указанный по меньшей мере один параметр может представлять собой период времени, частоту ультразвукового сигнала и/или амплитуду ультразвукового сигнала.
Блок управления может быть выполнен с возможностью создания уведомления об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
Устройство может содержать установку, грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
В соответствии с еще одним аспектом, представлена система определения глубины слоя в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Система определения глубины слоя содержит по меньшей мере один ультразвуковой передатчик, расположенный у части устройства, на которой или по отношению к которой перемещается просеиваемый материал, и выполненный с возможностью отправки ультразвукового сигнала к поверхности, и по меньшей мере один ультразвуковой приемник, выполненный с возможностью приема ультразвукового сигнала. Система определения глубины слоя отличается тем, что она дополнительно содержит блок управления, соединенный с указанным по меньшей мере одним ультразвуковым передатчиком и с указанным по меньшей мере одним ультразвуковым приемником и выполненный с возможностью вычисления глубины слоя просеиваемого материала, находящегося на поверхности, путем сравнения ультразвукового сигнала и опорного сигнала, основываясь на по меньшей мере одном параметре.
Система определения глубины слоя может быть расположена у части устройства, находящейся близко к краю устройства. Устройство может содержать грохот. Система определения глубины слоя может быть расположена в любой части деки грохота, например, близко к разгрузочному концу деки грохота. Преимущественно, можно определять глубину слоя материала на деке грохота непосредственно перед тем, как материал падает с деки грохота.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут представлять собой один единственный элемент, причем указанный единственный элемент содержит пьезоэлемент.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут быть объединены в один единственный блок.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут быть расположены у поверхности устройства обращенными друг к другу так, чтобы находиться напротив друг друга.
Система определения глубины слоя может содержать два или большее количество ультразвуковых передатчиков и два или большее количество ультразвуковых приемников, расположенных для определения глубины слоя на разных участках поверхности деки грохота. Это может обеспечить возможность контролирования и оценивания распределения материала по поверхности грохота. Идеальное распределение материала может обеспечивать одинаковую толщину слоя по всей ширине деки грохота, тогда как глубина слоя будет уменьшаться от положения выше по потоку в направлении вниз по потоку материала.
Сигнал может отправляться в направлении, по существу перпендикулярном поверхности устройства, по которому перемещается просеиваемый материал.
Сигнал может отправляться в направлении, образующем с поверхностью устройства наклонный угол.
Указанный по меньшей мере один параметр состоит из периода времени, частоты ультразвукового сигнала и/или амплитуды ультразвукового сигнала.
Блок управления может быть выполнен с возможностью создания уведомления об идентификации проблемы, если расчетная глубина слоя находится за пределами допустимого интервала.
Блок управления может быть выполнен с возможностью управления устройством на основе информации из ультразвукового сигнала.
Устройство может содержать грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
В соответствии с еще одним аспектом, предложен способ определения глубины слоя просеиваемого материала, например, минеральной массы, руды или тому подобного. Способ включает этапы, на которых отправляют ультразвуковой сигнал к поверхности, по которой перемещается просеиваемый материал, и принимают ультразвуковой сигнал. Способ отличается этапом вычисления глубины слоя просеиваемого материала, находящегося на поверхности, путем сравнения ультразвукового сигнала и опорного сигнала на основе по меньшей мере одного параметра.
В соответствии с одним вариантом выполнения, способ может дополнительно включать этап контроля глубины слоя, рассчитанного из двух или большего количества ультразвуковых сигналов, и выявления проблемы в устройстве на основе отслеживаемых глубинах слоя. В качестве примера, глубину слоя рассчитывают из двух ультразвуковых сигналов, принимаемых ультразвуковыми приемниками, расположенными в разных положениях деки грохота и контролируемых параллельно, что позволяет сравнивать глубину слоя в двух положениях деки грохота. Это позволяет контролировать и оценивать распределение материала на грохоте.
Обнаруженная проблема может представлять собой наклон грохота в деке грохота устройства. При обнаружении этой проблемы можно сделать вывод, что опорная конструкция грохота повреждена, например, отсутствует пружина, что приводит к наклону грохота. Наклоненный грохот может быть причиной нетипичного износа деки грохота и, поэтому, выгодно выявить эту проблему на ранней стадии, чтобы ее можно было исправить.
Обнаруженная проблема может представлять собой перегрузку деки грохота устройства. Такая проблема обнаруживается, когда одна глубина слоя, рассчитанная из одного ультразвукового сигнала, принятого в первом положении поверхности деки грохота, постоянно больше, чем глубина слоя, рассчитанная из ультразвукового сигнала, принятого во втором положении поверхности, и вблизи заранее заданного критического предела для глубины слоя.
Обнаруженная проблема может представлять собой потерянный модуль грохота. Такое событие может быть обнаружено, когда глубина слоя в положении этого модуля грохота станет отрицательной, а глубина слоя в модуле грохота ниже по потоку от потерянного модуля внезапно становится равной нулю, а также когда глубина слоя в соответствующем положении на соседней деке грохота внезапно увеличивается.
Обнаруженная проблема может представлять собой неравномерное распределение материала на деке грохота устройства. Такая проблема может быть обнаружена, когда одна глубина слоя, рассчитанная из одного ультразвукового сигнала, принятого в первом положении поверхности деки грохота, постоянно больше, чем глубина слоя, рассчитанная из ультразвукового сигнала, принятого во втором положении поверхности. Это приводит к большему износу части грохота, где глубина слоя больше, что снижает эффективность грохота. Таким образом, желательно обнаруживать такую проблему как можно раньше в процессе, чтобы устранить ее для полностью эффективного просеивающего устройства.
Способ может дополнительно включать этап выполнения конкретного действия, если вычисленная глубина слоя находится за пределами допустимого интервала.
В соответствии с еще одним аспектом, предложена система детектирования в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Система детектирования содержит по меньшей мере один ультразвуковой передатчик, расположенный у устройства и выполненный с возможностью отправки ультразвукового сигнала к поверхности, по меньшей мере один ультразвуковой приемник, выполненный с возможностью приема ультразвукового сигнала, и по меньшей мере один отражатель, выполненный с возможностью отклонения ультразвукового сигнала. Система детектирования отличается тем, что она дополнительно содержит блок управления, соединенный с указанным по меньшей мере одним ультразвуковым передатчиком и с указанным по меньшей мере одним ультразвуковым приемником и выполненный с возможностью определения различия по меньшей мере в одном параметре на основе сравнения ультразвукового сигнала и опорного сигнала.
Отражатель позволяет отклонять, под некоторым углом от передатчика, ультразвуковой сигнал, посылаемый ультразвуковым передатчиком по направлению к поверхности. Соответственно, отражатель дополнительно отклоняет к ультразвуковому приемнику ультразвуковой сигнал, отраженный обратно от поверхности. Таким образом, положения устройства, в котором ультразвуковой передатчик и ультразвуковой приемник не могут быть установлены из-за ограниченного доступа или других ограничений, все же могут подвергаться воздействию сигнала, так что указанный по меньшей мере один параметр ультразвукового сигнала может с их помощью быть обнаружен.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен в слепой зоне ультразвукового передатчика.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен на некотором расстоянии от ультразвукового передатчика и ультразвукового приемника, и у той части устройства, которая не является конструкцией, у которой расположены ультразвуковой передатчик и ультразвуковой приемник. В качестве примера, отражатель может быть расположен внутри устройства, а ультразвуковой передатчик и ультразвуковой приемник могут быть расположены у отверстия или на одной линии с отверстием в стенке устройства. Таким образом, ультразвуковой передатчик и ультразвуковой приемник могут быть расположены на некотором расстоянии от среды обработки материала, не допуская воздействия на эти части какой-либо грязи и вибрации.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен у той же конструкции устройства, что и ультразвуковой передатчик и ультразвуковой приемник.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен у невибрирующей поверхности устройства. Это обеспечивает стабильное отражение ультразвукового сигнала.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен у вибрирующей поверхности устройства. Это может быть необходимо для направления ультразвукового сигнала к поверхности, представляющей особый интерес. Ультразвуковой приемник в этом варианте выполнения выполнен с возможностью детектирования среднего значения сигнала, отраженного вибрирующим отражателем.
В соответствии с одним вариантом выполнения системы детектирования, отражатель расположен под углом 45° относительно плоскости, в которой расположен ультразвуковой передатчик. Это позволяет отклонять ультразвуковой сигнал на 90° и, таким образом, могут быть получены параметры поверхности, расположенной вертикально относительно плоскости ультразвукового передатчика. Поэтому ультразвуковой передатчик может быть расположен у конструкции, у которой он не подвергается воздействию рабочей среды.
В соответствии с одним вариантом выполнения системы детектирования, отражатель, ультразвуковой передатчик и ультразвуковой приемник содержатся в одном единственном блоке. Указанный единственный блок может содержать защитный корпус, в котором, по меньшей мере частично, размещены ультразвуковой передатчик, ультразвуковой приемник и отражатель. Преимущество такого единого блока состоит в том, что он может быть расположен у конструкции в рабочей среде устройства под углом к поверхности, подлежащей анализу. Благодаря по меньшей мере частичному размещению в защитном корпусе, ультразвуковой передатчик и ультразвуковой приемник защищены от пыли и грязи рабочей среды. Единый блок также может содержать средство очистки, как было описано выше.
Указанный по меньшей мере один ультразвуковой передатчик и указанный по меньшей мере один ультразвуковой приемник могут представлять собой один единственный элемент, при этом указанный единственный элемент содержит пьезоэлемент.
Сигнал может отправляться в направлении, по существу перпендикулярном поверхности устройства.
Сигнал может отправляться в направлении, образующем с поверхностью устройства наклонный угол.
Угол может быть регулируемым, чтобы обеспечить возможность оптимизации системы.
Указанный по меньшей мере один параметр может представлять собой период времени, частоту ультразвукового сигнала и/или амплитуду ультразвукового сигнала.
Блок управления может быть выполнен с возможностью создания уведомления об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
Устройство может содержать установку, грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
Другие цели, признаки и преимущества настоящего изобретения станут очевидными из последующего подробного описания, из прилагаемой формулы изобретения, а также из чертежей. Отмечено, что изобретение относится ко всем возможным комбинациям признаков.
Как правило, все термины, используемые в формуле изобретения, должны интерпретироваться в соответствии с их обычным значением в области техники, если в настоящем документе не указано иное.
Все ссылки в единственном числе (элемент, устройство, компонент, средство, этап и т.д.) должны толковаться открыто как относящиеся к по меньшей мере одному (элементу, устройству, компоненту, средству, этапу и т.д.), если явным образом не указано иное.
Используемый в настоящем документе термин «содержащий» и варианты этого термина не предназначены для исключения других добавок, компонентов, целых чисел или этапов.
Используемый в настоящем документе термин «ультразвуковой сигнал» и его вариации следует интерпретировать как полную волновую картину ультразвукового сигнала, полученную в результате инициирования передачи от ультразвукового передатчика. Следовательно, ультразвуковой сигнал содержит излучаемую «чистую» волновую картину, распространяющуюся от ультразвукового передатчика, а также любые отраженные волновые картины, получающиеся из указанной переданной волновой картины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышесказанное, а также дополнительные цели, признаки и преимущества настоящего изобретения будут лучше поняты посредством следующего иллюстративного и неограничивающего подробного описания вариантов выполнения настоящего изобретения со ссылкой на прилагаемые чертежи, на которых одинаковые номера позиций могут быть использованы для аналогичных элементов и где:
Фиг. 1 изображает вид сбоку в аксонометрии устройства, содержащего грохот и систему ультразвукового детектирования, выполненную в соответствии с вариантами выполнения настоящего изобретения.
Фиг. 2 изображает вид сбоку в аксонометрии устройства, содержащего устройство подачи и систему ультразвукового детектирования, выполненную в соответствии с другими вариантами выполнения изобретения. Часть устройства подачи отрезана для повышения ясности.
Фиг. 3 изображает вид сбоку в аксонометрии устройства, содержащего желоб и систему ультразвукового детектирования, выполненную в соответствии с другими вариантами выполнения изобретения. Часть желоба вырезана для повышения ясности.
Фиг. 4 изображает вид сбоку в аксонометрии системы детектирования очистки в устройстве для обработки просеиваемого материала, выполненной в соответствии с вариантами выполнения изобретения. Часть защитного корпуса системы детектирования очистки вырезана для повышения ясности.
Фиг. 5 изображает вид сбоку в аксонометрии системы определения глубины слоя в устройстве, содержащем грохот, в соответствии с вариантами выполнения изобретения.
Фиг. 6 изображает вид сбоку в аксонометрии системы определения глубины слоя в устройстве, содержащем грохот, показанный на Фиг. 5, в котором система определения глубины слоя выполнена с возможностью измерения характеристики грохота.
Фиг. 7 изображает вид в аксонометрии системы детектирования в устройстве, содержащем решетку, содержащую множество ультразвуковых передатчиков и ультразвуковых приемников, распределенных по поверхности деки грохота устройства.
Фиг. 8 изображает схематический вид сбоку системы детектирования в устройстве, содержащем отражатель для отклонения ультразвукового сигнала по направлению к поверхности, которая расположена под углом к плоскости ультразвукового передатчика и ультразвукового приемника.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
На Фиг. 1 изображено устройство 100 для обработки просеиваемого материала 102, например, минеральной массы, руды или тому подобного, в соответствии с одним иллюстративным вариантом выполнения.
Устройство 100 содержит грохот 110, содержащий по меньшей мере одну деку 112а, 112b, 112с (в этом примере: три деки грохота). Указанная по меньшей мере одна дека 112а, 112b, 112с грохота прикреплена к средству вибрации (не показано), выполненному с возможностью создания вибрации указанной по меньшей мере одной деки 112а, 112b, 112с грохота. Вибрация приводит к тому, что указанная по меньшей мере одна дека 112а, 112b, 112с грохота в разное время находится в разных положениях. Более конкретно, из-за вибрации указанная по меньшей мере одна дека 112а, 112b, 112с грохота в течение разных периодов времени будет располагаться в разных вертикальных положениях. Это проиллюстрировано на Фиг. 1 для самого верхнего грохота 112а указанной по меньшей мере одной деки 112а, 112b, 112с грохота. Средство вибрации здесь явным образом не раскрывается. Следует понимать, что в рамках формулы изобретения существует множество альтернативных способов достижения указанных вибраций.
Грохот 110 также содержит средство 14 загрузки, выполненное с возможностью загрузки просеиваемого материала на указанный по меньшей мере один грохот 112а, 112b, 112с. Для грохота 110 просеиваемый материал 102 загружается с помощью средства 14 загрузки на самую верхнюю деку 112а грохота. Самая верхняя дека 112а грохота имеет множество сквозных отверстий, покрывающих часть ее поверхности. Когда самая верхняя дека 112а грохота вибрирует, расположенный на ней просеиваемый материал 102 хаотично перемещается. Фрагменты просеиваемого материала 102 с размерами, меньшими, чем размеры сквозных отверстий, могут выходить из самой верхней деки 112а грохота через множество сквозных отверстий, оканчивающихся в средней деке 112b грохота, расположенной под самой верхней декой 112а грохота. Просеиваемый материал с размерами, превышающими размеры сквозных отверстий самой верхней деки 112а грохота, может выходить из самой верхней деки 112а грохота на ее конце, как показано на Фиг. 1. Средняя дека 112b грохота имеет множество сквозных отверстий, причем сквозные отверстия имеют размеры, которые меньше, чем размеры сквозных отверстий самой верхней деки 112а грохота. Таким образом, когда вибрирует средняя дека 112b грохота, расположенный на ней просеиваемый материал 102 хаотично перемещается. Фрагменты просеиваемого материала 102 с размерами, меньшими, чем размеры сквозных отверстий средней деки 112b грохота, могут выходить из средней деки 112b грохота через множество сквозных отверстий, заканчивающихся в самой нижней деке 112с грохота, расположенной под средней декой 112b грохота. Что касается самой верхней деки 112а грохота, то просеиваемый материал 102 на средней деке 112b грохота с размерами, превышающими размеры сквозных отверстий средней деки 112b грохота, может покидать среднюю деку 112b грохота на ее конце. Тот же процесс повторяется для самой нижней деки 112с грохота.
Таким образом, понятно, что назначением грохота 102 является сортировка или разделение просеиваемого материала 102 в соответствии с его размером. В конце концов, это достигается путем сбора просеиваемого материала 102, покидающего каждую деку грохота с ее края, а для самых маленьких размеров - под самой нижней декой грохота 112с.
Устройство 100 дополнительно содержит систему 140 ультразвукового детектирования.
Система 140 ультразвукового детектирования содержит ультразвуковой передатчик 151а, расположенный у поверхности 142а устройства 100. Ультразвуковой передатчик 151а выполнен с возможностью отправлять ультразвуковой сигнал 154а к поверхности 142а.
Система 140 ультразвукового детектирования также содержит ультразвуковой приемник 152а, расположенный у поверхности 142а и выполненный с возможностью приема ультразвукового сигнала 154а.
Ультразвуковой передатчик 151а и ультразвуковой приемник 152а могут представлять собой один единственный элемент. Такой единственный элемент может представлять собой приемопередатчик. В частности, для системы 140 ультразвуковой передатчик 151а и ультразвуковой приемник 152а представляют собой один единственный элемент, причем указанный единственный элемент содержит пьезоэлемент. В качестве альтернативы, ультразвуковой передатчик 151а и ультразвуковой приемник 152а могут представлять собой один единственный элемент, причем указанный единственный элемент содержит емкостный преобразователь.
Звуковые волны (то есть ультразвуковой сигнал 154а), передаваемые ультразвуковым передатчиком 151а, могут находиться в ультразвуковом диапазоне с рабочей частотой ƒ выше 20 кГц. Типичный диапазон рабочих частот составляет 90 кГц < ƒ < 150 кГц. Однако следует понимать, что выбор рабочей частоты влияет на эффективное расстояние, которое может использоваться для детектирования, из-за потерь на затухание звуковых волн, увеличивающихся с рабочей частотой. Следовательно, рабочая частота может зависеть от применения.
Система 140 ультразвукового детектирования может использоваться для контроля работы устройства, которое обрабатывает просеиваемый материал 102. Способ контроля работы устройства, такого как устройство 100, содержит этапы отправки ультразвукового сигнала 154а из ультразвукового передатчика 151а в направлении поверхности 142а устройства 100, приема ультразвукового сигнала 154а ультразвуковым приемником 152а, и определения по меньшей мере одного параметра ультразвукового сигнала 154а.
Способ может также включать этап сравнения ультразвукового сигнала 154а с опорным сигналом на основе указанного по меньшей мере одного параметра.
Способ может также включать этап выполнения конкретного действия, если различие в указанном по меньшей мере одном параметре между ультразвуковым сигналом 154а и опорным сигналом находится за пределами допустимого интервала. Система 140 ультразвукового детектирования также содержит блок 160 управления, соединенный с ультразвуковым передатчиком 151а и ультразвуковым приемником 152а. Блок 160 управления выполнен с возможностью определения по меньшей мере одного параметра ультразвукового сигнала 154а.
Указанный по меньшей мере один параметр может представлять собой период времени. В таком случае система 140 может быть выполнена с возможностью определения расстояния до цели путем определения временной задержки между временем передачи и временем приема сигнала 154а, переданного в направлении цели. Расстояние до цели может быть затем рассчитано с учетом скорости звука. Целью может быть поверхность 142а, материал, находящийся на поверхности 142а, или комбинация поверхности 142а и материала, находящегося на поверхности 142а.
В качестве альтернативы, указанный по меньшей мере один параметр может представлять собой частоту ультразвукового сигнала 154а. В таком случае система 140 ультразвукового детектирования может быть выполнена с возможностью определения скорости цели относительно системы 140. Скорость цели может быть рассчитана с учетом скорости звука с использованием формулы эффекта Доплера для звуковых волн.
В качестве альтернативы, указанный по меньшей мере один параметр может представлять собой амплитуду ультразвукового сигнала 154а. В таком случае система 140 ультразвукового детектирования может быть выполнена с возможностью определения поверхностных свойств цели.
Несмотря на то, что это и обсуждается отдельно, для достижения назначения системы 140 ультразвукового детектирования может быть использована любая комбинация свойств времени, частоты и амплитуды. Также могут быть использованы и другие свойства. Например, для определения свойств цели может быть использовано пространственное распределение ультразвукового сигнала 154а. Для такого случая ультразвуковой приемник 152а может содержать датчик пространственного разрешения. Кроме того, свойства ультразвукового сигнала 154а, передаваемого ультразвуковым передатчиком 152а, могут различаться в зависимости от назначения. Например, сигнал 154а может быть импульсным или непрерывным. Кроме того, опорная частота ультразвукового сигнала 154а может варьироваться в зависимости от назначения.
Блок 160 управления может быть выполнен с возможностью определения различия в указанном по меньшей мере одном параметре на основе сравнения ультразвукового сигнала 154а и опорного сигнала. Опорный сигнал может, например, представлять собой сигнал, обнаруживаемый блоком 160 управления, в случае, когда на ультразвуковой сигнал 154а не влияет никакой просеиваемый материал. Например, опорный сигнал может быть записан и сохранен, когда грохот 100 пуст. В качестве альтернативы или дополнительно, опорный сигнал может представлять собой сигнал, обнаруживаемый блоком 160 управления для конкретного положения вибрирующего грохота. Например, опорный сигнал может представлять собой сигнал, обнаруживаемый блоком 160 управления, когда дека грохота находится в своем стандартном положении.
Существуют многочисленные преимущества и полезность ультразвукового детектора, выполненного в соответствии с изобретением. Это будет также обсуждаться позже в подробном описании. Например, блок 160 управления может быть выполнен с возможностью создания сообщения об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала. Сообщение может инициировать выдачу блоком 160 управления тревоги и/или уведомления. В качестве альтернативы или дополнительно, блок 160 управления может выдавать команду, инициирующую действие, решающее или по меньшей мере частично устраняющее проблему. Команда может быть выдана другому блоку или внутри блока 160 управления. Команда может относиться к инициированию вычисления, например, для получения физического параметра. В качестве альтернативы или дополнительно, команда может относиться к блоку 160 управления (или к дополнительному блоку) для инициирования действия управления в отношении устройства 100. В частности, для устройства 100 блок 160 управления может инициировать команду, относящуюся к управлению работой средства вибрации. Это может включать, например, регулировку частоты вибрации или остановку вибрации. В качестве альтернативы, блок 160 управления может инициировать команду, относящуюся к управлению работой средства 114 загрузки для управления скоростью подачи из него.
Система 140 ультразвукового детектирования дополнительно содержит средство 170 очистки, соединенное с блоком 160 управления и расположенное у ультразвукового передатчика 151а и ультразвукового приемника 152а. Блок 160 управления выполнен с возможностью управления процессом очистки ультразвукового передатчика 151а и/или ультразвукового приемника 152а с помощью средства 170 очистки. Средство 170 очистки обеспечивает возможность использования системы 140 детектирования ультразвука в жестких и пыльных условиях без риска снижения эффективности детектирования во время работы.
Средство 170 очистки содержит средство продувки воздухом, имеющее источник 172 сжатого воздуха. Средство продувки воздухом проточно соединено с ультразвуковым передатчиком 151а и ультразвуковым приемником 152а. Блок 170 управления выполнен с возможностью управления подачей сжатого воздуха, например, для подачи сжатого воздуха, чтобы поддерживать чистоту ультразвукового передатчика 151а и ультразвукового приемника 152а. Сжатый воздух может нагнетаться в виде импульсов, происходящих через равномерные интервалы времени. В качестве альтернативы, сжатый воздух может нагнетаться непрерывно. Блок 170 управления может быть выполнен с возможностью управления потоком сжатого воздуха через трубопроводы. Это может быть достигнуто путем регулирования давления воздуха в источнике 172 сжатого воздуха. В качестве альтернативы или дополнительно, это может быть достигнуто путем регулирования поперечного сечения трубопровода, например, с использованием дросселя или регулируемого клапана.
Система 140 ультразвукового детектирования дополнительно содержит защитный корпус 156а, вмещающий, по меньшей мере частично, ультразвуковой передатчик 151а и ультразвуковой приемник 152а. Одним назначением корпуса 156а является защита ультразвукового детектора 140 от воздействия загрязнений, таких как грязь или пыль, как во влажных, так и в сухих условиях. Другое назначение защитного корпуса 156а состоит в управлении пространственным распределением передаваемого ультразвукового сигнала 154а. Это достигается тем, что звуковые волны отражаются на внутренней стенке защитного корпуса 156а. Структура поверхности внутренней стенки защитного корпуса 156а имеет в этом случае важное значение. Шероховатая поверхность может привести к обратным отражениям, что может повлиять на пространственное распределение и/или на длину проникновения передаваемого ультразвукового сигнала 154а. Кроме того, если используется по меньшей мере один ультразвуковой приемник 152а, то обратные отражения могут привести к ухудшению показаний при обнаружении сигнала 154а. Детали, касающиеся очистки системы ультразвукового детектирования, будут также обсуждаться позже.
Указанный по меньшей мере один ультразвуковой передатчик 151а и указанный по меньшей мере один ультразвуковой приемник 152а могут быть установлены внутри корпуса 156а таким образом, чтобы образовывать единый блок 150а ультразвукового детектирования. Блок 150а ультразвукового детектирования может быть установлен на раме устройства. Блок 150а может быть присоединен с возможностью перемещения, чтобы можно было регулировать расстояние между ним и поверхностью 142а.
Устройство 100 также содержит второй блок 150b ультразвукового детектирования, выполненный с возможностью измерения свойств, относящихся к самой средней деке 112b грохота. Второй блок 150b ультразвукового детектирования расположен у второй поверхности 142b устройства 100. Второй блок 150b ультразвукового детектирования выполнен с возможностью передачи ультразвукового сигнала 154b, направленного по существу горизонтально, так что ультразвуковой сигнал 154b сбоку попадает на просеиваемый материал, находящийся на самой средней деке 112b грохота. Второй блок 150b ультразвукового детектирования обнаруживает ультразвуковой сигнал 154b, преимущественно возникающий в результате отражений от просеиваемого материала 102. Таким образом, становится понятно, что второй блок 150b ультразвукового детектирования обеспечивает информацию другого типа, чем блок 150а ультразвукового детектирования, который может предоставлять информацию как от просеиваемого материала, так и от поверхности 142а. Второй блок 150b ультразвукового детектирования соединен с блоком 160 управления и проточно соединен с источником 172 сжатого воздуха.
Система ультразвукового детектирования предпочтительно находится в невибрирующем положении, например, на опорной раме устройства. Это повышает надежность и долговечность системы с течением времени. Однако система ультразвукового детектирования может быть выполнена с возможностью вибрации вместе с устройством. Это может быть преимуществом в некоторых применениях, когда другие средства детектирования и/или углы детектирования не соответствуют поставленной задаче.
На Фиг. 2 изображено устройство 200, выполненное в соответствии с другим иллюстративным вариантом выполнения. Устройство 200 содержит загрузочное устройство 210. Загрузочное устройство 210 выполнено с возможностью подачи просеиваемого материала 202 в дополнительное устройство 280, такое как, например, дробилка. Устройство 200 содержит систему 240 ультразвукового детектирования, аналогичную системе ультразвукового детектирования, изображенной на Фиг. 1. Система 240 ультразвукового детектирования содержит блок 250 ультразвукового детектирования, выполненный с возможностью определения наличия негабаритного материала, который может подвергнуться риску заклинивания внутри указанного дополнительного устройства 280.
На Фиг. 3 изображено устройство 300, выполненное в соответствии с другим иллюстративным вариантом выполнения. Устройство 300 содержит желоб 311. Желоб 311 выполнен с возможностью направления просеиваемого материала 102 из одного или нескольких источников просеиваемого материала (в этом примере из двух источников просеиваемого материала) к конвейерной ленте 312. Конвейерная лента 312 выполнена с возможностью транспортировки просеиваемого материала 302, полученного из желоба 311, в другое устройство 380, такое как, например, дробилка. Устройство 300 содержит систему 340 ультразвукового детектирования, аналогичную системе ультразвукового детектирования, показанной на Фиг. 1. Несмотря на то, что иллюстративный вариант выполнения на Фиг. З показывает желоб, содержащий двойные впускные отверстия, следует понимать, что и одинарный впускной желоб может быть в равной степени хорошо оборудован системой ультразвукового детектирования, выполненной в соответствии с настоящим изобретением.
Система 340 ультразвукового детектирования содержит первый блок 350а ультразвукового детектирования, выполненный с возможностью измерения внутри первого ответвления 311а желоба 311, и второй блок 350b ультразвукового детектирования, выполненный с возможностью измерения внутри второго ответвления 311b желоба 311. В ситуационном примере, показанном на Фиг. З, просеиваемый материал застрял внутри первого ответвления 311а желоба 311, тогда как через второе ответвления 311b желоба 311 просеиваемый материал может свободно перемещаться. Следовательно, модуль 160 управления будет получать сигнал от первого модуля 350а ультразвукового детектирования другой сигнал, чем от второго модуля 350b ультразвукового детектирования. Блок 160 управления может быть в состоянии послать сигнал тревоги, чтобы сообщить о застрявшем материале внутри первого ответвления 311а.
Система 340 ультразвукового детектирования также содержит третий блок 350 с ультразвукового детектирования, выполненный с возможностью измерения у поверхности конвейерной ленты 312. Назначение третьего блока 350 с ультразвукового детектирования аналогично назначению блока 250 ультразвукового детектирования, изображенного на Фиг. 2, то есть обнаруживать большие куски просеиваемого материала, который рискует застрять в указанном дополнительном устройстве 380. Другое назначение третьего блока 350 с ультразвукового детектирования может заключаться в обнаружении застреваний в других частях процесса выше по потоку от того места, где расположен третий блок 350 с ультразвукового детектирования. Например, если ожидается, что просеиваемый материал будет находиться на конвейере 312, но третий блок 350 с ультразвукового детектирования не обнаруживает наличие материала, то это будет означать застревание или другую проблему выше по потоку, эффективно препятствующую попаданию материала на конвейер 312.
Устройство 300 содержит средство 370 очистки, аналогичное средству 170 очистки для устройства 100, обсуждаемого в настоящем документе. В частности, все блоки ультразвукового детектирования - первый 350а, второй 350b и третий 350 с проточно сообщаются с источником 372 сжатого воздуха. Кроме того, все блоки ультразвукового детектирования - первый 350а, второй 350b и третий 350 с соединены с блоком 360 управления.
Блок 360 управления выполнен с возможностью управления процессом очистки ультразвуковых передатчиков и/или ультразвуковых приемников первого 350а, второго 350b и третьего 350 с блоков ультразвукового детектирования посредством средства 370 очистки. Блок 360 управления может быть выполнен с возможностью разного управления процессом очистки для разных ультразвуковых детекторов. Например, в первый 350а и второй 350b блоки ультразвукового детектирования может подаваться непрерывный поток сжатого воздуха для создания избыточного давления в защитных корпусах блоков ультразвукового детектирования, тогда как в третий блок 350с ультразвукового детектирования может подаваться сжатый воздух через заранее заданные промежутки времени. На Фиг. 4 показана система 400 детектирования очистки в устройстве для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Система 400 детектирования очистки содержит ультразвуковой передатчик 451, расположенный у поверхности 442 устройства и выполненный с возможностью отправки ультразвукового сигнала 454 к поверхности 442, ультразвуковой приемник 452, расположенный у поверхности 442 и выполненный с возможностью приема ультразвукового сигнала 454, и защитный корпус 456, по меньшей мере частично содержащий указанный по меньшей мере один ультразвуковой передатчик 451 и указанный по меньшей мере один ультразвуковой приемник 452. Система 400 отличается тем, что она также содержит блок 460а управления, соединенный с указанным по меньшей мере одним ультразвуковым передатчиком 451 и с указанным по меньшей мере одним ультразвуковым приемником 452 и выполненный с возможностью определения различия в по меньшей мере одном параметре на основе сравнения ультразвукового сигнала 454 и опорного сигнала.
Система 400 детектирования очистки также содержит средство 470 очистки, расположенное у защитного корпуса 456. Средство 470 очистки, в свою очередь, содержит средство продувки воздухом, выполненное с возможностью очистки защитного корпуса 456. Средство продувки воздухом содержит сопло 474, расположенное внутри защитного корпуса 456. Сопло 474 проточно соединено с источником 472 сжатого воздуха посредством трубопровода 476. Средство 470 очистки соединено с дополнительным блоком 460b управления, выполненным с возможностью управления работой средства 470 очистки для начала очистки защитного корпуса 456. Указанный дополнительный блок 460b управления дает команду источнику 472 сжатого воздуха подавать сжатый воздух в трубопровод 476, обеспечивая, тем самым, поступление струи 478 сжатого воздуха во внутреннюю часть защитного корпуса 456. В варианте выполнения, показанном на Фиг. 4, сопло 474 имеет такую форму, чтобы подавать струю 478 воздуха в направлении ультразвукового передатчика 451 и ультразвукового приемника 452. Положение сопла 474 может быть регулируемым, чтобы обеспечивать возможность оптимизации очистки защитного корпуса 456, и должно быть таким, чтобы оно не мешало прохождению сигнала от ультразвукового приемопередатчика и к нему. Однако в других вариантах выполнения направление потока может отличаться.
Ультразвуковой передатчик 451 и ультразвуковой приемник 452 представляют собой один единственный элемент, причем указанный единственный элемент содержит пьезоэлемент. Таким образом, ультразвуковой передатчик 451 и ультразвуковой приемник 452 содержатся в одном единственном блоке.
Сигнал 454 может быть отправлен в направлении, по существу перпендикулярном поверхности 442 устройства. Указанный по меньшей мере один параметр может представлять собой период времени, частоту и/или амплитуду ультразвукового сигнала 454.
Блок 460а управления может быть выполнен с возможностью создания сообщения об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
Как упоминалось выше, система 400 детектирования очистки является частью устройства для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного. Несмотря на то, что это явным образом и не показано на Фиг. 4, такая конструкция может содержать установку, грохот, деку грохота, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
Фиг. 5 иллюстрирует устройство 500 для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного, выполненное в соответствии с иллюстративным вариантом выполнения, причем устройство 500 содержит систему определения глубины слоя.
Устройство 500 содержит грохот 510, содержащий по меньшей мере одну деку 512. Указанная по меньшей мере одна дека 512 грохота прикреплена к средству вибрации (не показано), выполненному с возможностью создания вибрации указанной по меньшей мере одной деки 512 грохота. Вибрация приводит к тому, что в разные моменты времени указанная по меньшей мере одна дека 512 грохота расположена в разных положениях. В частности, из-за вибрации указанная по меньшей мере одна дека 512 грохота в течение разных временных интервалов будет расположена в разных вертикальных положениях. Средство вибрации в настоящем документе явным образом не раскрыто. Следует понимать, что в пределах объема формулы изобретения существует множество альтернативных способов достижения указанных вибраций.
Грохот 510 также содержит средство 514 загрузки, выполненное с возможностью загрузки просеиваемого материала на указанный по меньшей мере один грохот 512. Для грохота 510 просеиваемый материал 502 загружают через средство 514 загрузки на указанный по меньшей мере один грохот 512. Указанная по меньшей мере одна дека 512 имеет множество сквозных отверстий, покрывающих часть ее поверхности. Когда указанная по меньшей мере одна дека 512 вибрирует, расположенный на ней просеиваемый материал 502 будет хаотично перемещаться. Фрагменты просеиваемого материала 502 с размерами, меньшими, чем размеры сквозных отверстий, могут покидать указанную по меньшей мере одну деку 512 через указанное множество сквозных отверстий. Просеиваемый материал с размерами, которые превышают размеры сквозных отверстий указанной по меньшей мере одной деки 512, может покидать указанную по меньшей мере одну деку 512 на ее конце, как проиллюстрировано на Фиг. 5.
Устройство 500 дополнительно содержит систему определения глубины слоя для определения глубины W слоя просеиваемого материала 502. Система определения глубины слоя содержит блок 550 ультразвукового детектирования и блок 560 управления.
Блок 550 ультразвукового детектирования содержит ультразвуковой передатчик 551, расположенный у части, в данном случае у поверхности 542 устройства 500, по которой или относительно которой перемещается просеиваемый материал, причем ультразвуковой передатчик 551 выполнен с возможностью отправки ультразвукового сигнала 554 в направлении поверхности 542. Блок 550 также содержит ультразвуковой приемник 552, выполненный с возможностью приема ультразвукового сигнала 554.
Блок 560 управления соединен с ультразвуковым передатчиком 551 и с ультразвуковым приемником 552 и выполнен с возможностью вычисления глубины W слоя просеиваемого материала 502, расположенного на поверхности 542, путем сравнения ультразвукового сигнала 554 и опорного сигнала, основываясь на по меньшей мере одном параметре.
Система определения глубины слоя также содержит средство 570 очистки, соединенное с блоком 560 управления и расположенное у ультразвукового передатчика 551 и ультразвукового приемника 552. Блок 560 управления выполнен с возможностью управления процессом очистки ультразвукового передатчика 551 и/или ультразвукового приемника 552 с помощью средства 570 очистки. Средство 570 очистки обеспечивает возможность использования системы определения глубины слоя в жестких и пыльных условиях окружающей среды без риска снижения эффективности детектирования во время работы.
Средство 570 очистки содержит средство нагнетания воздуха, имеющее источник 572 сжатого воздуха. Средство нагнетания воздуха проточно сообщается с ультразвуковым передатчиком 551 и ультразвуковым приемником 552. Блок 570 управления выполнен с возможностью управления подачей сжатого воздуха, например, для нагнетания сжатого воздуха, чтобы поддерживать ультразвуковой передатчик 551 и ультразвуковой приемник 552 в чистоте. Сжатый воздух может нагнетаться импульсами, выполняемыми через равномерные промежутки времени. В качестве альтернативы, сжатый воздух может нагнетаться непрерывно. Блок 570 управления может быть выполнен с возможностью управления потоком сжатого воздуха через трубопроводы. Это может быть достигнуто путем регулировки давления воздуха в источнике 572 сжатого воздуха. В качестве альтернативы или дополнительно, это может быть достигнуто путем регулировки поперечного сечения трубопровода, например, с использованием дросселя или регулируемого клапана.
В этом конкретном варианте выполнения ультразвуковой передатчик 551 и ультразвуковой приемник 552 состоят из одного пьезоэлемента, а модуль 550 ультразвукового детектирования расположен так, что ультразвуковой сигнал 554 отправляется в направлении, по существу перпендикулярном поверхности 542 устройства 500.
Как указано выше, система определения глубины слоя используется для определения глубины W слоя просеиваемого материала 502. Способ определения глубины слоя просеиваемого материала 502 включает этапы отправки ультразвукового сигнала 554 к поверхности 542, по которой или относительно которой перемещается просеиваемый материал, приема ультразвукового сигнала 554 и вычисления глубины W слоя просеиваемого материала 502, находящегося на поверхности 542, путем сравнения ультразвукового сигнала 554 и опорного сигнала, основываясь на по меньшей мере одном параметре.
Способ может также включать выполнение конкретного действия, если вычисленная глубина W слоя находится за пределами допустимого интервала.
Существует множество способов вычисления глубины W слоя просеиваемого материала 502 на основе информации от блока 550.
Указанный по меньшей мере один параметр может представлять собой период времени. В этом случае система определения глубины слоя может быть выполнена с возможностью определения расстояния до цели путем определения временной задержки между временем передачи и временем приема ультразвукового сигнала 554, передаваемого в направлении цели. В этом конкретном варианте выполнения целью является материал, находящийся на поверхности 542.
Это время задержки может быть затем сравнено с соответствующей временной задержкой, определенной с учетом опорного сигнала, который был передан и получен соответствующим образом, как было описано выше, но в идеальных условиях, например, когда устройство 500 не работает или работает, но без нагрузки.
На основании различия во временной задержке с помощью блока 560 управления могут быть вычислены глубина W слоя просеиваемого материала 502 или размер объектов, находящихся на поверхности устройства 500.
Если различие между периодом времени ультразвукового сигнала 554 и периодом времени опорного сигнала отклоняется более чем на заранее заданный предел погрешности, можно сделать вывод, что в устройстве 500 имеется техническая проблема.
В качестве альтернативы, указанный по меньшей мере один параметр может представлять собой частоту ультразвукового сигнала 554. В этом случае система определения глубины слоя может быть выполнена с возможностью определения скорости цели относительно системы определения глубины. Скорость цели может быть рассчитана с учетом скорости звука, используя формулу эффекта Доплера для звуковых волн.
В качестве альтернативы, указанный по меньшей мере один параметр может представлять собой амплитуду ультразвукового сигнала 554.
Несмотря на то, что эти параметры обсуждаются отдельно, для достижения назначения системы определения глубины слоя может быть использована любая комбинация свойств времени, частоты и амплитуды. Также могут быть использованы и другие свойства. Например, для получения заключения о свойствах цели, может использоваться пространственное распределение сигнала 554. Для такого случая ультразвуковой приемник 552 может содержать датчик пространственного разрешения. Кроме того, свойства ультразвукового сигнала 554, передаваемого ультразвуковым передатчиком 551, могут различаться в зависимости от назначения. Например, сигнал может быть импульсным или непрерывным. Кроме того, опорная частота ультразвукового сигнала 554 может варьироваться в зависимости от назначения.
Блок 560 управления может быть выполнен с возможностью определения различия в указанном по меньшей мере одном параметре на основе сравнения ультразвукового сигнала 554 и опорного сигнала. Опорный сигнал может, например, представлять собой сигнал, определенный блоком 560 управления в случае, когда на сигнал 554 не влияет никакой просеиваемый материал 502. Например, опорный сигнал может быть записан и сохранен, когда устройство 500 не работает или работает, но без нагрузки. В качестве альтернативы или дополнительно, опорный сигнал может представлять собой сигнал, определенный блоком 560 управления для конкретного положения вибрирующего грохота 510. Например, опорный сигнал может представлять собой сигнал, определенный блоком 560 управления, когда дека 512 разгружена в своем стандартном положении.
Путем измерения глубины W слоя просеиваемого материала 502 на грохоте 510, можно рассчитать многие важные параметры, относящиеся к процессу просеивания. Эти параметры могут быть использованы для оптимизации процесса, для выяснения того, перегружен или недогружен грохот по сравнению с техническими условиями, для расчета и прогнозирования срока службы поверхностей грохочения и т.д.
Существует несколько математических моделей для расчета пропускной способности для заданной глубины W слоя. Используя эти математические модели, можно рассчитать эффективность грохота 510, чтобы выяснить, как он работает. Эта информация может быть использована для оптимизации процесса просеивания. Для заданной пропускной способности также можно дать рекомендации относительно подходящей глубины W слоя для грохота 510. Система может выдавать предупреждение, если глубина слоя слишком велика или слишком мала по сравнению с установленными уровнями.
Эта информация также может быть использована для расчета срока службы поверхностей грохочения. Для пользователя всегда очень важно знать, сколько просеиваемого материала может обработать каждая дека 512 перед тем, как ее следует заменить. Это означает, что время простоя для обслуживания и замены можно прогнозировать и минимизировать, чтобы сэкономить деньги. Этот тип информации также важен для того, чтобы поставщик мог доставлять пользователю поверхности грохочения именно тогда, когда это необходимо. Например, можно использовать систему во время плановых простоев, когда деки грохота свободны от просеиваемого материала. Путем измерения расстояния до поверхности деки грохота и сравнения показаний с течением времени, можно определить, насколько износилась дека грохота, и, зная начальную толщину поверхности грохочения, можно с высокой степенью достоверности определить, когда пришло время заменить поверхность грохочения. Все или только некоторые из модулей поверхности грохочения могут быть заменены одновременно. Эта информация может быть использована для прогнозирования скорости износа и срока службы как в часах, так и в тоннах, а также для связи прогнозируемого износа с фактическим износом.
На Фиг. 6 изображено устройство 500, предназначенное для контроля работы грохота 510. Грохот 510 на этом чертеже изображен свободным от любого просеиваемого материала 502. Однако предполагается, что материал 502 может и находиться на грохоте, по меньшей мере в какой-то степени. Фиг. 6 помогает проиллюстрировать, что система определения глубины слоя может быть использована для контроля перемещения указанной по меньшей мере одной деки 512 относительно системы определения глубины слоя. В частности, система определения глубины слоя может быть использована для измерения амплитуды вибрации указанной по меньшей мере одной деки 512. Для устройства 500 амплитуда может быть определена в вертикальном измерении путем определения расстояния между системой определения глубины слоя и грохотом для разных положений грохота 510. Максимальной амплитудой в вертикальном направлении будет различие между максимальным расстоянием Dmax и минимальным расстоянием Dmin. Система определения глубины слоя также может быть использована для определения временных флуктуаций вибрационного движения указанной по меньшей мере одной деки 512 грохота.
Задача определения вибрационных характеристик указанной по меньшей мере одной деки 512 состоит в том, чтобы идентифицировать нежелательное поведение грохота. Одним из примеров такого нежелательного поведения является случай, когда дека 512 вибрирует с частотой, равной собственной частоте указанной по меньшей мере одной деки 512, или вблизи этой частоты, т.е. ситуация, которая значительно увеличивает риск возникновения неисправности грохота. Другой пример касается влияния просеиваемого материала 502 на вибрационные характеристики. Например, если просеиваемый материал 502, находящийся на указанной по меньшей мере одной деке 512, представляет собой чрезмерную нагрузку и/или некоторые куски материала имеют размер, который не ожидается, может быть выполнено внезапное встряхивание. Это подразумевает, что система определения глубины слоя может быть использована для косвенного измерения просеиваемого материала 502 в результате того, что просеиваемый материал 502 влияет на вибрационные характеристики указанного по меньшей мере одного грохота 512.
Фиг. 7 иллюстрирует устройство 700 для обработки просеиваемого материала, например, минеральной массы, руды или тому подобного, выполненное в соответствии с иллюстративным вариантом выполнения, которое содержит грохот, содержащий, соответственно, множество ультразвуковых передатчиков и ультразвуковых приемников.
Устройство 700 содержит грохот 710, имеющий по меньшей мере одну деку 712. Устройство дополнительно содержит средство 714 загрузки, выполненное с возможностью загрузки просеиваемого материала на указанную по меньшей мере одну деку 712 грохота.
В этом иллюстративном варианте выполнения устройство 700 имеет решетку, содержащую шесть блоков 750 ультразвукового детектирования, причем каждый блок 750 содержит ультразвуковой передатчик 751, выполненный с возможностью отправления ультразвукового сигнала 754 к поверхности 742 указанной по меньшей мере одной деки 712 грохота. Каждый блок 750 ультразвукового детектирования также содержит ультразвуковой приемник 752, выполненный с возможностью приема ультразвукового сигнала 754. Блоки 750 распределены по поверхности деки 712 грохота.
Блок 760 управления соединен с каждым из ультразвуковых передатчиков 751 и ультразвуковых приемников 752 и выполнен с возможностью определения по меньшей мере одного параметра ультразвукового сигнала каждого блока ультразвукового детектирования. Примером такого параметра является глубина W слоя просеиваемого материала 702, находящегося на поверхности 742.
Блок 760 управления может быть выполнен с возможностью определения различия в указанном по меньшей мере одном параметре ультразвукового сигнала каждого из блоков ультразвукового детектирования на основе сравнения соответствующего ультразвукового сигнала 754 и опорного сигнала.
Блок 760 управления может быть также соединен с устройством 780 контроля для контроля по меньшей мере одного параметра ультразвукового сигнала 754 каждого из блоков 750 ультразвукового детектирования. Параметр, например, глубина W слоя, определенный каждым из блоков 750 ультразвукового детектирования, может контролироваться и отслеживаться в режиме реального времени.
Способ контроля расчетной глубины слоя, выше обсуждавшийся в этом описании, по ультразвуковым сигналам из решетки, содержащей множество ультразвуковых передатчиков и приемников, может обеспечивать значительный объем полезной информации. Например, при контроле расчетной глубины слоя по ультразвуковым сигналам от участков на левой и правой сторонах поверхности деки грохота устройства может быть определено, что один из сигналов обеспечивает более высокую расчетную глубину слоя, чем другой сигнал. Если значение расчетной глубины слоя непрерывно увеличивается для одного сигнала, это говорит о том, что существует неравномерное распределение материала на деке грохота и, следовательно, плохое распределение при загрузке материала. Если отслеживаемое значение расчетной глубины слоя близко к заданному верхнему пределу, это говорит о том, что дека грохота, по меньшей мере на соответствующей части поверхности, перегружена.
Если значение расчетной глубины слоя значительно изменяется, это может указывать на то, что ультразвуковой сигнал не достигает поверхности, для которой он настроен на измерение, перпендикулярно, что приводит к эхо-сигналу. Таким образом, можно сделать вывод, что грохот наклонен, например, из-за отсутствующей пружины или другой опорной конструкции грохота.
Фиг. 8 изображает иллюстративный вариант выполнения части системы ультразвукового детектирования в устройстве 800, содержащем по меньшей мере один отражатель 880. Проиллюстрированное устройство 800 содержит по меньшей мере одну деку 812 грохота. Устройство также содержит стенку 818 грохота, расположенную на конце деки 812 грохота.
Устройство 800 также содержит блок 850 ультразвукового детектирования, расположенный на стенке 818 грохота. Блок 850, однако, может быть расположен в другом месте устройства. Блок 850 ультразвукового детектирования содержит ультразвуковой передатчик 851, выполненный с возможностью отправки ультразвукового сигнала 854 в горизонтальной плоскости, и ультразвуковой приемник 852, выполненный с возможностью приема ультразвукового сигнала 854. Блок 850 также содержит отражатель 880, расположенный у указанной по меньшей мере одной деки 812 грохота или вблизи нее, и в горизонтальной плоскости на некотором расстоянии от блока 850 ультразвукового детектирования. В этом иллюстративном варианте выполнения отражатель 880 расположен под углом 45° относительно горизонтальной плоскости, так что он может отклонять ультразвуковой сигнал 854, поступающий от ультразвукового передатчика 851, в сторону деки 812 грохота. Соответственно, отражатель может отклонять ультразвуковой сигнал 854, отраженный назад от деки грохота, в сторону ультразвукового приемника 852. Таким образом, отражатель обеспечивает возможность отклонения ультразвукового сигнала 854 в направлении поверхности, которая расположена вертикально относительно плоскости, в которой расположен блок 850 ультразвукового детектирования.
Путем размещения отражателя под разными углами, ультразвуковой сигнал 854 может быть отклонен в направлении поверхностей под разными углами от плоскости блока 850 ультразвукового детектирования. Таким образом, отражатель дает преимущество, заключающееся в обеспечении доступа ультразвукового сигнала к местам устройства 800, которые труднодоступны из-за недостатка места или из-за конструкций для установки ультразвукового передатчика и ультразвукового приемника, или из-за суровых рабочих условий.
Специалист поймет, что без отхода от объема изобретения, который определен в прилагаемой формуле изобретения, возможен ряд модификаций вариантов выполнения, описанных в данном документе. Например, в альтернативном варианте выполнения для определения проблемы в устройстве на основе вычисленной глубины слоя деки грохота устройства или на основе распределения на ней материала может быть использовано лазерное сканирование.
Также вместо ультразвуковых устройств можно использовать радиолокационное оборудование. Используя радар, можно измерять те же вещи, что и с помощью ультразвуковых приборов, и, кроме того, радар позволяет измерять и исследовать различные слои по глубине. Это также позволяет анализировать и оценивать распределение частиц по размерам в слое даже во время работы грохота. Используя радиолокационное оборудование, можно также охватить всю поверхность или по меньшей мере большую ее часть, например, деки грохота, одним единственным блоком.
Также для проведения измерений между деками грохота или ниже них возможно расположить датчики позади деки грохота. Таким образом можно измерять плотность или, другими словами, количество материала, которое падает с деки грохота, вычисляя, тем самым, тоннаж за единицу времени. Более сильное эхо будет означать, что через деку грохота будет проходить больше материала, тогда как более слабое эхо будет означать, что через нее будет проходить меньше материала. Затем можно было бы оценить, сколько материала прошло через заданную деку грохота по отношению к теоретическому содержанию частиц заниженного размера в материале, подаваемом на просеивающее устройство. Полученная таким образом информация может быть использована для оценки распределения нагрузки просеиваемого материала на деку грохота, а также для оценки эффективности грохочения. Это также обеспечивает информацию, насколько забита дека грохота по сравнению с полностью открытой декой грохота.
С помощью настоящего изобретения также возможно определить и оценить забивание и застревание. Даже при том, что и то и другое приводит к одному и тому же конечному результату, закупорку поверхности грохочения, это две разные проблемы. Забивание происходит, когда мелкие частицы слипаются и образуют нечто похожее на липкую пасту, блокирующую отверстия поверхности грохочения, тогда как застревание происходит, когда более крупная частица, как правило, неправильной формы, попадает в отверстие поверхности грохочения, но не может пройти через него. С помощью настоящего изобретения не только возможно определить, что произошло - забивание и/или застревание. Также возможно определить, насколько велика зона поражения, а также можно определить накопление, то есть высоту забивания.
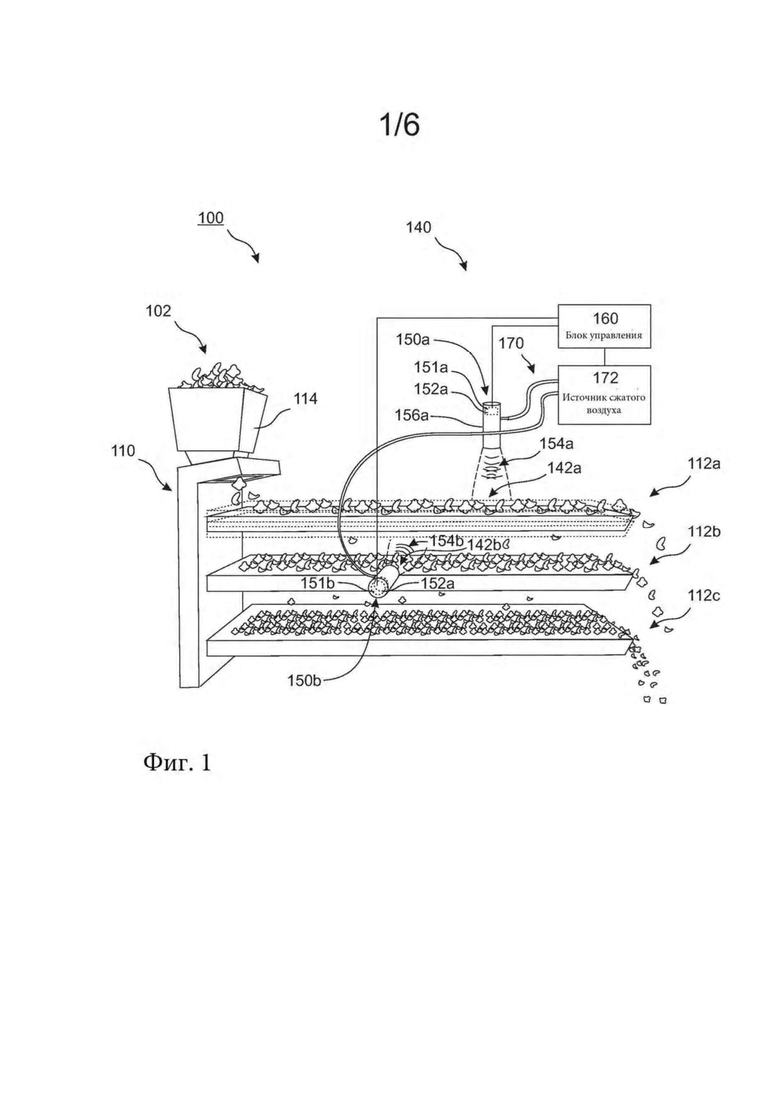
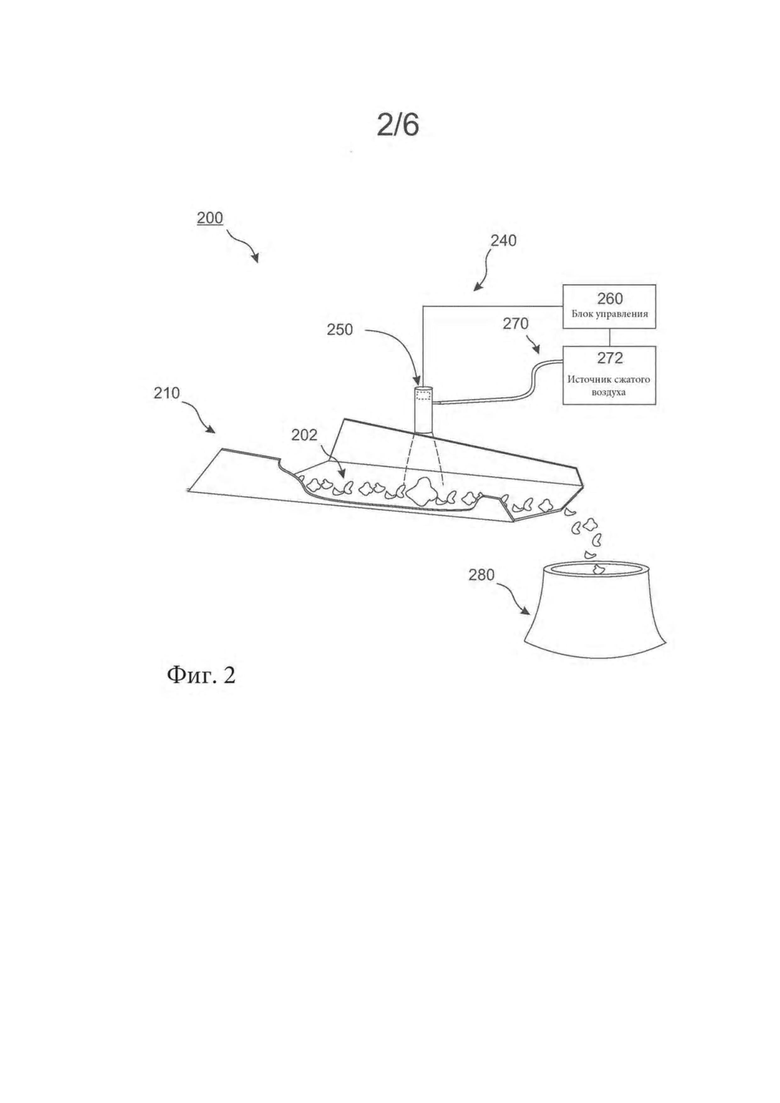
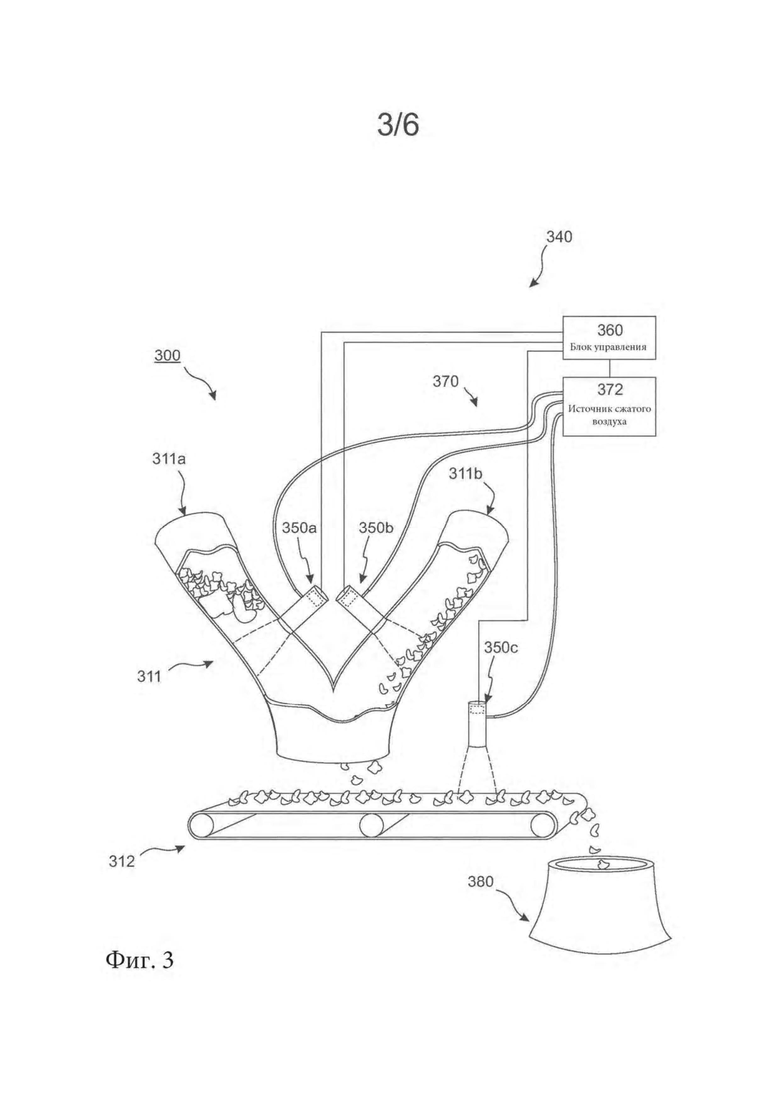
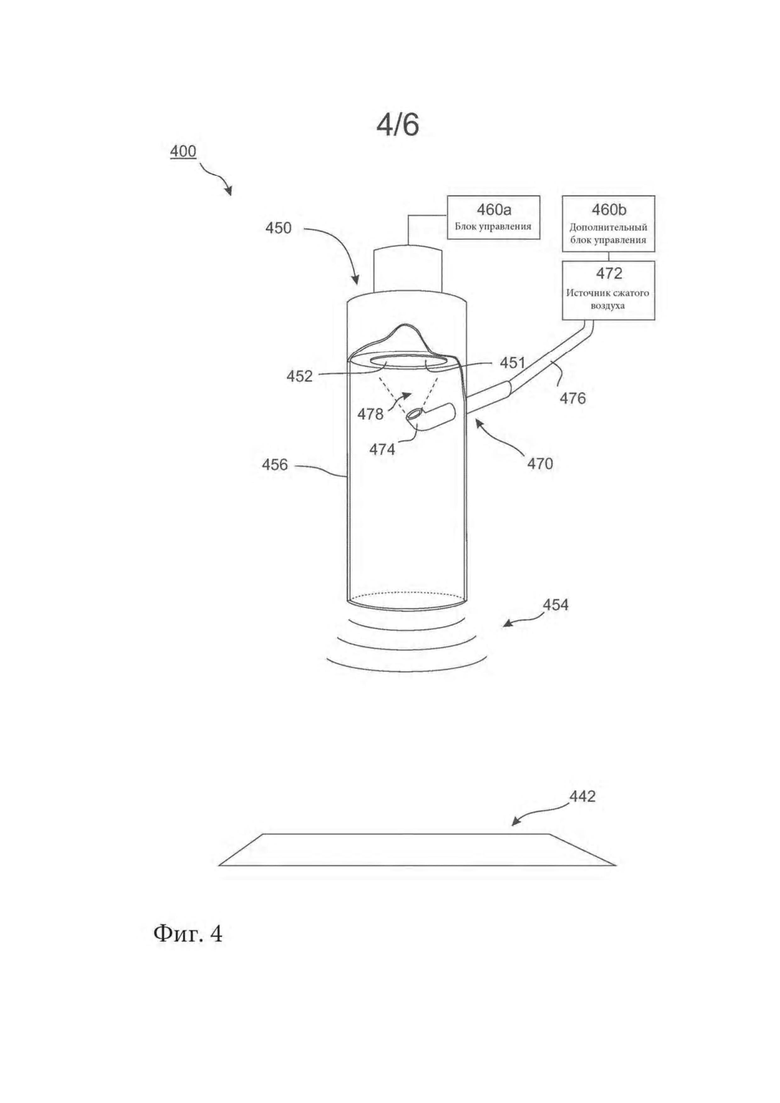
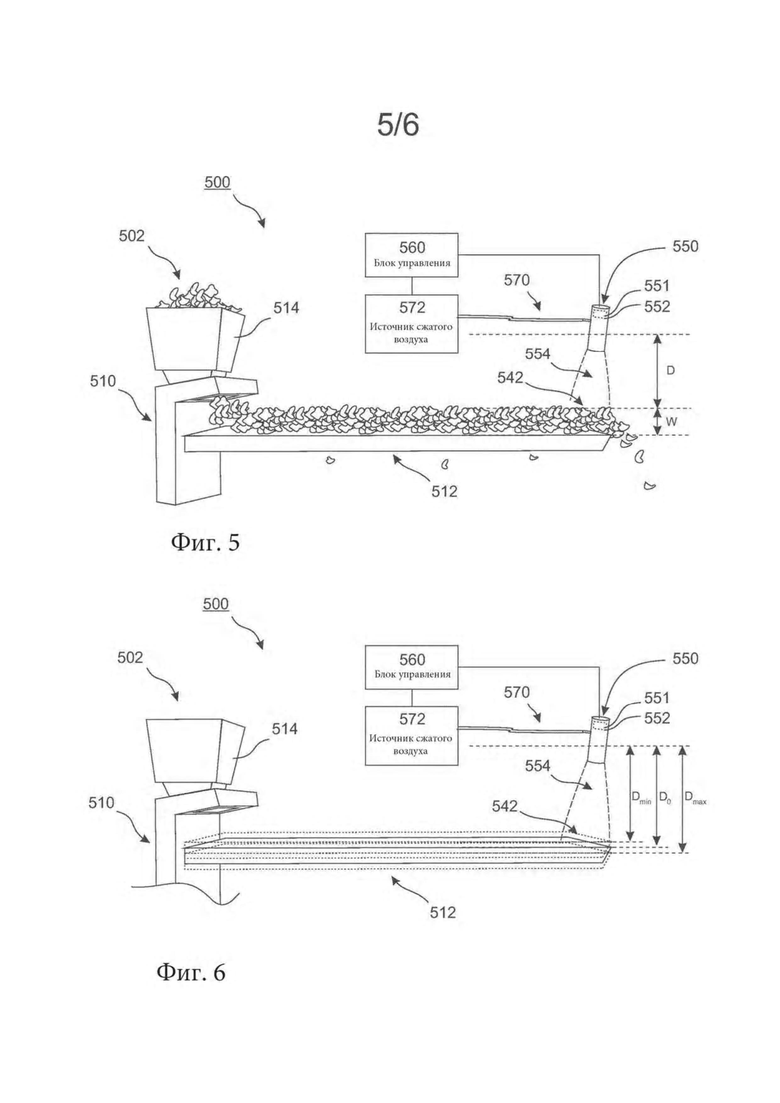
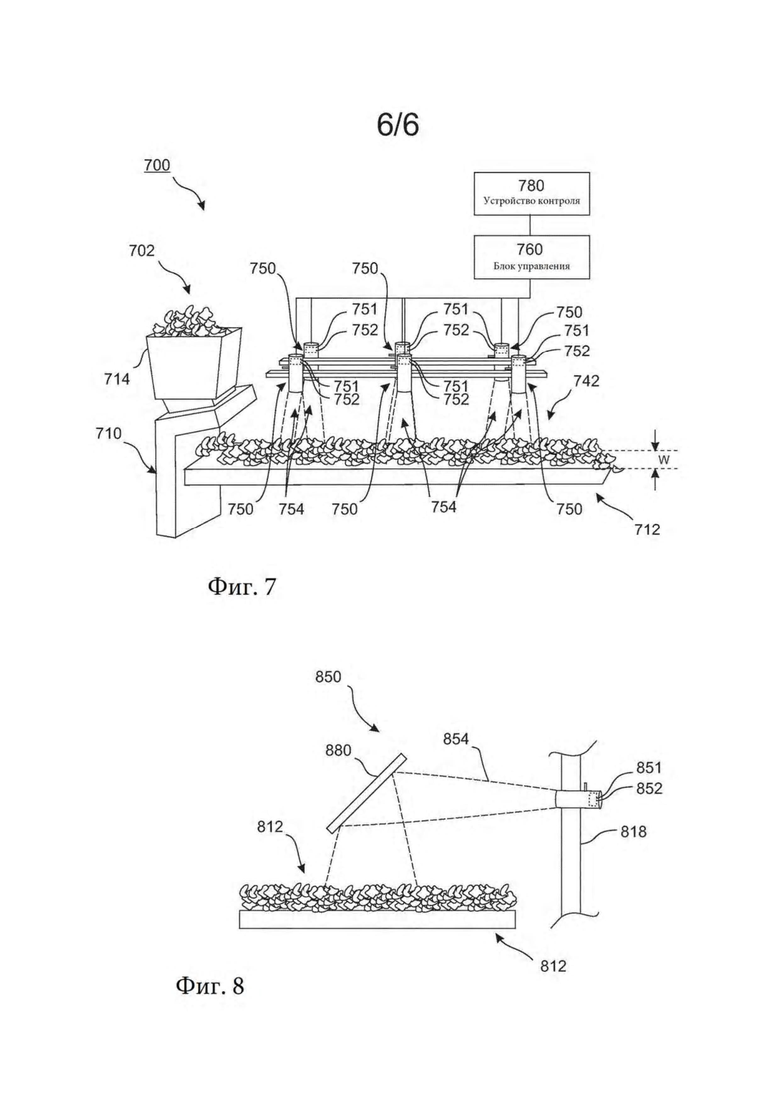
Использование: для обработки просеиваемого материала. Сущность изобретения заключается в том, что устройство для обработки просеиваемого материала содержит деку грохота и/или желоб грохота, по которым или относительно которых перемещается просеиваемый материал, а также систему ультразвукового детектирования, которая содержит: ультразвуковой передатчик, расположенный у указанного устройства и выполненный с возможностью отправки ультразвукового сигнала к поверхности, по которой перемещается просеиваемый материал для определения параметра, такого как глубина слоя просеиваемого материала на указанной поверхности, ультразвуковой приемник, выполненный с возможностью приема ультразвукового сигнала, и блок управления, соединенный с ультразвуковым передатчиком и ультразвуковым приемником, причем блок управления выполнен с возможностью определения по меньшей мере одного параметра ультразвукового сигнала, при этом блок управления также выполнен с возможностью определения различия в указанном по меньшей мере одном параметре на основе сравнения ультразвукового сигнала и опорного сигнала, при этом система ультразвукового детектирования содержит решетку, содержащую набор ультразвуковых передатчиков и ультразвуковых приемников, причем каждый ультразвуковой передатчик и ультразвуковой приемник расположен поверх поверхности деки грохота устройства или расположен рядом с поверхностью деки грохота устройства, при этом устройство содержит отражатель, выполненный с возможностью отклонения ультразвукового сигнала, направленного к указанной поверхности. Технический результат: обеспечение возможности получения такого параметра, как глубина слоя просеиваемого материала на деке. 2 н. и 25 з.п. ф-лы, 8 ил.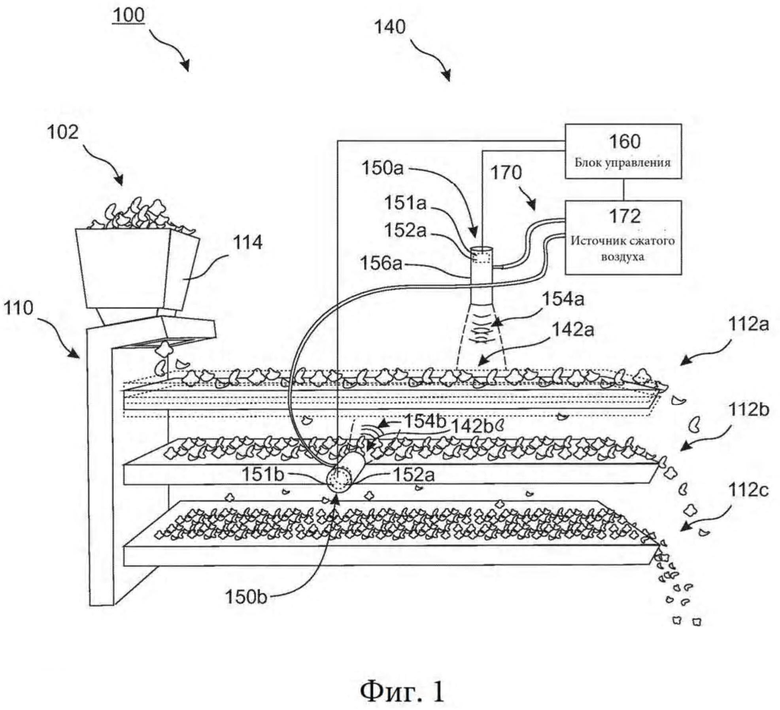
1. Устройство (100) для обработки просеиваемого материала (102), причем указанное устройство (100) содержит деку (112) грохота и/или желоб (114) грохота, по которым или относительно которых перемещается просеиваемый материал, а также систему (140) ультразвукового детектирования, которая содержит:
ультразвуковой передатчик (151a), расположенный у указанного устройства (100) и выполненный с возможностью отправки ультразвукового сигнала (154a) к поверхности (142a), по которой перемещается просеиваемый материал для определения параметра, такого как глубина слоя просеиваемого материала на указанной поверхности,
ультразвуковой приемник (152a), выполненный с возможностью приема ультразвукового сигнала (154а), и
блок (160) управления, соединенный с ультразвуковым передатчиком (151а) и ультразвуковым приемником (152а), причем блок (160) управления выполнен с возможностью определения по меньшей мере одного параметра ультразвукового сигнала (154а),
при этом блок (160) управления также выполнен с возможностью определения различия в указанном по меньшей мере одном параметре на основе сравнения ультразвукового сигнала (154а) и опорного сигнала,
при этом система ультразвукового детектирования содержит решетку, содержащую набор ультразвуковых передатчиков и ультразвуковых приемников,
причем каждый ультразвуковой передатчик и ультразвуковой приемник:
расположен поверх поверхности деки грохота устройства (100) или
расположен рядом с поверхностью деки грохота устройства, при этом устройство содержит отражатель, выполненный с возможностью отклонения ультразвукового сигнала, направленного к указанной поверхности.
2. Устройство (100) по п.1, также содержащее средство (170) очистки, соединенное с блоком (160) управления и расположенное у ультразвукового передатчика (151а) и ультразвукового приемника (152а), причем блок (160) управления выполнен с возможностью управления процессом очистки ультразвукового передатчика (151а) и/или ультразвукового приемника (152а) с использованием средства (170) очистки.
3. Устройство (100) по любому из предшествующих пунктов, в котором блок (160) управления выполнен с возможностью создания сообщения об идентификации проблемы, если различие в указанном по меньшей мере одном параметре находится за пределами допустимого интервала.
4. Устройство (100) по любому из предшествующих пунктов, также содержащее защитный корпус (156а), по меньшей мере частично вмещающий ультразвуковой передатчик (151а) и ультразвуковой приемник (152а).
5. Устройство (100) по любому из пп.2-4, в котором средство (170) очистки содержит средство продувки воздухом.
6. Устройство (100) по любому из предшествующих пунктов, в котором ультразвуковой передатчик (151а), или ультразвуковой приемник (152а), или они оба содержат пьезоэлемент.
7. Устройство (100) по любому из предшествующих пунктов, в котором указанный по меньшей мере один параметр представляет собой частоту ультразвукового сигнала (154а).
8. Устройство (100) по любому из пп.1-5, в котором ультразвуковой передатчик (151а) и ультразвуковой приемник (152а) представляют собой один единственный элемент, причем указанный единственный элемент содержит пьезоэлемент.
9. Устройство (100) по любому из предшествующих пунктов, в котором указанный по меньшей мере один параметр представляет собой период времени.
10. Устройство (100) по любому из предшествующих пунктов, в котором указанный по меньшей мере один параметр представляет собой амплитуду ультразвукового сигнала (154а).
11. Устройство (100) по любому из предшествующих пунктов, в котором отражатель расположен на расстоянии от ультразвукового передатчика (151) и ультразвукового приемника (152) и расположен у конструкции указанного устройства (100), которая отличается от конструкции, у которой расположены ультразвуковой передатчик (151) и ультразвуковой приемник (152).
12. Устройство (100) по любому из предшествующих пунктов, в котором отражатель расположен у той же самой конструкции устройства, у которой расположены ультразвуковой передатчик (151) и ультразвуковой приемник (152).
13. Устройство (100) по любому из предшествующих пунктов, в котором отражатель расположен у невибрирующей конструкции устройства (100).
14. Устройство (100) по любому из предшествующих пунктов, в котором отражатель расположен у вибрирующей конструкции устройства (100).
15. Устройство (100) по любому из предшествующих пунктов, в котором отражатель расположен под углом 45° относительно плоскости, в которой расположен ультразвуковой передатчик.
16. Устройство (100) по любому из предшествующих пунктов, в котором ультразвуковой передатчик, ультразвуковой приемник и отражатель содержатся в одном-единственном блоке, причем указанный единственный блок имеет по меньшей мере частичное покрытие.
17. Устройство (100) по любому из предшествующих пунктов, в котором два или большее количество ультразвуковых передатчиков и два или большее количество ультразвуковых приемников расположены в устройстве (100) в разных положениях.
18. Устройство (100) по любому из предшествующих пунктов, в котором устройство (100) также содержит установку, грохот, конвейерную ленту, желоб, загрузочную коробку или разгрузочную коробку.
19. Устройство (100) по любому из пп.1-11, также содержащее грохот (110) для просеивания материала, причем грохот (110) содержит раму и элементы, расположенные в раме грохота.
20. Устройство (100) по любому из предшествующих пунктов, в котором просеиваемый материал (102) представляет собой минеральную массу или руду.
21. Способ контроля работы устройства (100) по любому из пп.1-20, причем способ включает следующие этапы:
отправку ультразвукового сигнала (154а) от ультразвукового передатчика (151а) к указанной поверхности (142а) устройства (100), по которой перемещается просеиваемый материал,
прием ультразвукового сигнала (154а) с помощью ультразвукового приемника (152а) и
определение по меньшей мере одного параметра ультразвукового сигнала (154а).
22. Способ по п.21, в котором вычисляют глубину слоя просеиваемого материала, находящегося на поверхности (42а), путем сравнения ультразвукового сигнала (154а) и опорного сигнала на основании указанного по меньшей мере одного параметра.
23. Способ по п.22, в котором осуществляют контроль глубины слоя, рассчитанной по двум или большему количеству ультразвуковых сигналов, и определяют проблему в устройстве на основании контролируемой глубины слоя.
24. Способ по п.23, в котором обнаруженная проблема представляет собой наклон деки грохота устройства, вызванный опорной конструкцией грохота, например пружиной.
25. Способ по п.23, в котором проблема заключается в перегрузке деки грохота устройства.
26. Способ по п.23, в котором проблема заключается в нежелательном распределении материала на деке грохота устройства.
27. Способ по любому из пп.21-26, в котором сравнивают ультразвуковой сигнал (154а) с опорным сигналом на основании указанного по меньшей мере одного параметра и выполняют конкретное действие, если различие в указанном по меньшей мере одном параметре между ультразвуковым сигналом (154а) и опорным сигналом находится за пределами допустимого интервала.
| US 4909449 A, 20.03.1990 | |||
| JPS 61114177 A, 31.05.1986 | |||
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ И СЫПУЧИХ СРЕД | 2002 |
|
RU2195635C1 |
| Способ определения физико-механических свойств сыпучих материалов при помощи преобразователя с буферным стержнем | 1989 |
|
SU1693530A1 |

