Область техники
Изобретение относится к системе обнаружения и способу обнаружения объектов в просеивающем устройстве.
Уровень техники
Современные просеивающие устройства, используемые для просеивания сред, обычно представляют собой опору ситовой панели и просеивающие модули, которые устанавливаются в опоре ситовой панели. Такие сита имеют ряд преимуществ по сравнению с ситами более ранних поколений, поскольку отдельные просеивающие модули могут заменяться при износе или поломке.
Просеивающие модули должны иметь как можно большую активную поверхность, а размер активной поверхности обычно ограничен жесткостью просеивающего модуля. Вместе с тем просеивающий модуль меньшей жесткости требует расположения опорных секций с более короткими интервалами, что приводит к увеличению мертвой зоны поверхности просеивающего модуля. Однако создание всей просеивающей поверхности, состоящей из одного просеивающего модуля, и сокращение количества опорных точек до минимума не представляет собой удобную альтернативу. Такой способ, несомненно, создает максимальную величину активной поверхности, но за счет очень высоких эксплуатационных расходов, поскольку в случае локального износа необходимо будет производить замену всей просеивающей деки.
Следовательно, желательно иметь сито с большой активной поверхностью и высокой стабильностью, в котором было бы легко заменить отдельные просеивающие модули.
Поскольку сита вышеуказанного типа подвергаются существенным нагрузкам в процессе использования, просеивающие модули должны крепиться по месту к раме для предотвращения их отделения. Традиционный способ достижения этого состоит в использовании молотка для забивания запорных элементов в своего рода трубку, предусмотренную в опоре ситовой панели, или путем прикручивания просеивающих модулей к опоре ситовой панели.
Проблема с этими типами сит заключается в том, что всегда существует риск отделения просеивающих модулей от опоры ситовой панели в процессе использования. Когда это происходит, для продолжения работы просеивающего устройства жизненно важно, чтобы отделенный просеивающий модуль обнаруживался и заменялся как можно быстрее. В противном случае качество просеянного продукта будет поставлено под угрозу, и также возможно, что отделенный просеивающий элемент может вызвать выход из строя просеивающего устройства или другой аппаратуры ниже по потоку от просеивающего устройства. Кроме того, элементы футеровки, используемые в просеивающем устройстве, могут также отделяться и вызывать проблемы ниже по потоку от просеивающего устройства.
Документ DE 19837466 раскрывает систему обнаружения в просеивающем устройстве, содержащем датчик для обнаружения неисправностей в этом устройстве.
Сущность изобретения
Цель настоящего изобретения состоит в том, чтобы обеспечить улучшение вышеупомянутой технологии и предшествующего уровня техники. Более конкретно, целью настоящего изобретения является создание улучшенной системы обнаружения объектов в просеивающем устройстве.
В соответствии с первым аспектом, эти и другие цели и/или преимущества, которые будут очевидны из последующего описания вариантов осуществления, достигаются полностью или по меньшей мере частично с помощью системы обнаружения в просеивающем устройстве для просеивания материала, такого как агрегат, руда или подобное, включающем в себя по меньшей мере одну просеивающую деку, причем эта по меньшей мере одна просеивающая дека имеет просеивающую поверхность, содержащую один или более просеивающих модулей. Система содержит датчик, расположенный на или возле выпуска по меньшей мере одной просеивающей деки просеивающего устройства. Датчик выполнен таким образом, что он может обнаруживать объекты, присутствующие возле выпуска по меньшей мере одной просеивающей деки. Кроме того, датчик представляет собой ультразвуковой датчик.
Преимущество заключается в том, что материал, покидающий просеивающие деки, может быть проконтролирован таким образом, что может быть обнаружен инородный объект. По существу, система обнаружения используется для обнаружения того, были ли любые просеивающие модули, элементы футеровки или подобное отделены от своего положения в просеивающем устройстве. Поскольку, например, просеивающий модуль изготовлен из другого материала и, как правило, больше по размеру по сравнению с материалом, который подлежит просеиванию в просеивающем устройстве, он может быть обнаружен системой обнаружения при прохождении через область, контролируемую датчиками. Как только просеивающий модуль, элемент футеровки или подобное обнаруживается в массовом потоке в просеивающем устройстве, просеивающее устройство может быть остановлено, чтобы инородный объект мог быть повторно закреплен или заменен.
Датчик может быть размещен в стратегической позиции, так, что он будет контролировать заранее заданную область рядом с выпуском просеивающей деки, и предпочтительно, не будет находиться в прямом контакте с просеивающим устройством, чтобы избежать воздействия вибрации просеивающего устройства. Таким образом, датчик может быть расположен на или вблизи выпуска по меньшей мере одной просеивающей деки или на или возле воронки ниже по потоку от одной или более просеивающих дек. В другом предпочтительном варианте осуществления датчик может быть расположен на опорной конструкции, независимой от просеивающего устройства. Естественно, при необходимости датчик также может быть прикреплен к боковой стенке просеивающего устройства.
Кроме того, датчик может быть ориентирован для передачи сигналов в направлении, в общем перпендикулярном массовому потоку из одной или более просеивающих дек, или для передачи сигналов в направлении, в общем параллельном массовому потоку из одной или более просеивающих дек. Хотя первый вариант часто является предпочтительным, второй также возможен, так что решение о размещении может быть принято на основе доступного пространства и силы сигнала.
В соответствии с одним вариантом осуществления изобретения, датчик расположен для обнаружения объектов, присутствующих снаружи от заранее заданной области, примыкающей к выпуску по меньшей мере одной просеивающей деки. Эта заранее заданная область может быть по меньшей мере частично определена баллистической траекторией. Было выявлено, что любые объекты, выходящие из выпуска просеивающей деки, будь то отсортированный материал в виде гравия или минеральной руды, или отделенный просеивающий модуль, будут следовать по пути, который может быть определен как баллистическая траектория. Кроме того, было обнаружено, что инородные объекты, такие как просеивающие модули и элементы футеровки, будут следовать по пути, который шире пути отсортированного материала, или, по меньшей мере из-за их размера, выступают из пути отсортированного материала. Таким образом, просеивающие модули и элементы футеровки будут по меньшей мере выступать из потока отсортированного материала, например гравия или рудного материала. Размещая датчик или датчики таким образом, что область, которую они контролируют, лежит непосредственно снаружи от такой баллистической траектории отсортированного материала, датчик или датчики смогут определять, что инородный объект, такой так элемент футеровки или просеивающий модуль, присутствует в массовом потоке.
В соответствии с одним вариантом осуществления изобретения баллистическая траектория имеет начальную точку на или около выпускного конца по меньшей мере одной просеивающей деки.
В соответствии с одним вариантом осуществления изобретения, датчик представляет собой дальномер. Может использоваться простой дальномер, поскольку расстояние до стенки с противоположной стороны от датчика известно и может быть определено как X. Таким образом, если дальномер идентифицирует объект/объекты на расстоянии d<X, это может быть воспринято как указание на то, что в массовом потоке присутствует инородный объект.
В соответствии с одним вариантом осуществления изобретения, датчик представляет собой ультразвуковой датчик. Ультразвуковой датчик может быть, например, пьезоэлектрического типа или в виде емкостного преобразователя. Ультразвуковой датчик может быть дальномером. Использование ультразвуковых датчиков может иметь преимущество по сравнению с решениями известного уровня техники, такими как оптические датчики или камеры, поскольку они работоспособны в более широком диапазоне условий. Более конкретно, часто пыльная и грязная среда внутри и около сита может ослаблять оптические сигналы до такой степени, что оптические датчики не могут обеспечить точные данные измерений. Кроме того, ультразвуковые датчики могут обеспечить высокую точность, и они менее чувствительны к влаге, чем многие альтернативные типы датчиков. Они также довольно недорогие. Другое преимущество ультразвуковых датчиков состоит в том, что они позволяют регулировать чувствительность системы обнаружения для обнаружения отделенных просеивающих модулей путем последующей обработки ультразвуковых сигналов различными способами, например, путем применения фильтров, регулировки частоты дискретизации и т.д. Таким образом, система обнаружения, содержащая такие ультразвуковые датчики, может быть более гибкой, чем другие системы обнаружения. Это может позволить использовать аппаратную конфигурацию одного и того же типа для системы обнаружения в разных вариантах осуществления сит (например, разных размеров и т.д.) и/или для различного вида материала просеивания на конкретном сите.
В соответствии с одним вариантом осуществления изобретения датчик располагают на конструкции, которая независима от просеивающего устройства. Отдельная конструкция может быть предусмотрена для предотвращения всех или по меньшей мере значительной части вибраций, возникающих в просеивающем устройстве, которые могут отрицательно влиять на долговечность и точность датчика/датчиков и других частей системы обнаружения.
В соответствии с одним вариантом осуществления изобретения система обнаружения дополнительно содержит блок управления, который соединен с датчиком, причем блок управления выполнен с возможностью управлять просеивающим устройством на основе информации от датчика. Размещая блок управления в системе обнаружения, можно добиться того, чтобы работа просеивающего оборудования регулировалась при обнаружении инородного объекта в массовом потоке. Например, процедура просеивания может быть остановлена в ответ на обнаружение такого инородного объекта.
В соответствии с одним вариантом осуществления изобретения, блок управления выполнен с возможностью различать сигналы датчика, полученные от материала, подлежащего просеиванию, например породы, железной руды, агрегата и т.п., и сигналы датчика, возникающие в результате появления инородного объекта, такого как перемещенный просеивающий модуль или элемент футеровки. Определение баллистической траектории для отсортированного материала может подразумевать некоторую величину неопределенностей, и во избежание пропуска инородного объекта, датчик/датчики могут быть расположены таким образом, чтобы между диапазоном измерения и областью, где проходит отсортированный материал, существовало определенное перекрытие. Следовательно, возможно, что датчик/датчики иногда обнаруживают отсортированный материал, а не только инородные объекты. Таким образом, предпочтительно, чтобы блок управления был способен различать отсортированный материал и инородные объекты.
В соответствии с одним вариантом осуществления изобретения блок управления выполнен с возможностью различать сигналы датчика, вызванные материалом, который подлежит просеиванию, и сигналы датчика, вызванные инородным объектом, например перемещенным просеивающим модулем или элементом футеровки, посредством применения одного или более заранее заданных пороговых значений. Блок управления может представлять собой программируемый логический контроллер (PLC), который в общем случае может быть описан как промышленный цифровой компьютер, который изготовлен особо прочным и адаптирован для управления промышленными процессами. PLC и/или датчик (-и) могут питаться от внешнего источника питания. Таким внешним источником питания может быть, например, система на основе батареи или солнечных элементов, но также может быть электрическая сеть. Данные измерений могут передаваться по кабелю Ethernet, например, с использованием протокола MODBUS.
В соответствии с одним вариантом осуществления изобретения, пороговое значение базируется на времени, в течение которого объект находится в диапазоне действия датчика. Поскольку элемент футеровки или просеивающий модуль обычно имеют больший размер и изготавливаются из материалов, отличных от отсортированного материала, они будут присутствовать в диапазоне действия датчика/датчиков в течение более длительного времени, или по меньшей мере в течение другого периода времени, чем частицы отсортированного материала. Следовательно, можно основывать пороговые значения на времени, в течение которого объект находится в диапазоне действия датчика/датчиков. Блок управления также может, например, быть запрограммирован так, чтобы иметь различные пороговые значения, которые впоследствии могут использоваться для определения того, существует ли инородный объект в массовом потоке или нет. Пороговые уровни могут также, или альтернативно, базироваться на размере или на материале, из которого сделаны обнаруживаемые объекты. Другими словами, блок управления может быть выполнен с возможностью различать сигналы датчика, вызванные материалом, подлежащим просеиванию, и сигналы датчика, вызванные инородным объектом, таким как перемещенный просеивающий модуль или элемент футеровки, посредством применения заранее заданных пороговых значений. Различные материалы будут отражать акустические волны по-разному, и объекты различного размера также будут отражать акустические волны по-разному. Следовательно, можно различать, например, просеивающий модуль, изготовленный из покрытого резиной металла, и гравийные частицы, подлежащие просеиванию. Некоторые или все датчики в соответствии с изобретением способны определять площадь измеряемого объекта, и поскольку, например, просеивающий модуль в большинстве случаев будет иметь большую поверхность, чем частицы материала, подлежащего просеиванию, будет возможно определить присутствие инородного объекта на основе площади объекта, который обнаруживается датчиком/датчиками. Эти пороговые значения могут использоваться по отдельности или в сочетании с одним или более другими.
В соответствии со вторым аспектом, эти и другие цели достигаются полностью или по меньшей мере частично способом обнаружения объектов в просеивающем устройстве, содержащем одну или более просеивающих дек. Способ включает в себя передачу сигналов от датчика относительно массового потока из одной или более просеивающих дек, при этом упомянутый датчик расположен так, что он может обнаруживать объекты, покидающие упомянутую по меньшей мере одну просеивающую деку.
В соответствии с одним вариантом осуществления изобретения способ дополнительно включает в себя этапы
- определение области, примыкающей к выпуску по меньшей мере одной просеивающей деки, в пределах которой массовый поток просеянного материала предположительно будет обнаружен после выпуска из упомянутой по меньшей мере одной просеивающей деки;
- размещение упомянутого датчика таким образом, чтобы он мог обнаруживать любые объекты за пределами упомянутой области;
- задание пороговых значений;
- определение того, присутствует или нет инородный объект в упомянутом массовом потоке, путем использования упомянутых пороговых значений.
В соответствии с одним вариантом осуществления изобретения способ дополнительно включает в себя этапы
- обеспечение наличия блока управления, предназначенного для приема сигналов от датчика; и
- определение того, присутствует или нет в массовом потоке инородный объект, такой как перемещенный просеивающий модуль или элемент футеровки, на основе сравнения сигналов, принятых упомянутым блоком управления от упомянутого датчика, с упомянутыми пороговыми значениями.
В соответствии с одним вариантом осуществления изобретения, способ дополнительно включает в себя этап
- управление рабочим параметром просеивающего устройства на основе результата упомянутого сравнения сигналов, принятых упомянутым блоком управления от упомянутого датчика, с упомянутыми пороговыми значениями.
В соответствии с третьим аспектом, эти и другие цели достигаются полностью или по меньшей мере частично посредством использования системы обнаружения в соответствии с описанными выше признаками в просеивающем устройстве, содержащем одну или более просеивающих дек, для обнаружения объектов, присутствующих на одной или более просеивающих деках или рядом с ними.
Эффекты и признаки второго и третьего аспектов настоящего изобретения в значительной степени аналогичны тем, которые описаны выше в связи с первым аспектом концепции изобретения. Варианты осуществления, упомянутые в связи с первым аспектом настоящего изобретения, в значительной степени совместимы со вторым и третьим аспектом изобретения.
Другие цели, признаки и преимущества настоящего изобретения станут очевидными из следующего подробного раскрытия, из прилагаемой формулы изобретения, а также из чертежей. Отметим, что изобретение относится ко всем возможным комбинациям признаков.
В общем, все термины, используемые в формуле изобретения, должны интерпретироваться в соответствии с их обычным значением в области техники, если в настоящем документе не указано иное. Все ссылки на элемент, устройство, компонент, средство, этап и т.д. должны толковаться открыто как относящиеся к по меньшей мере одному примеру упомянутого элемента, устройства, компонента, средства, этапа и т.д., если явно не указано иное.
Используемый здесь термин «содержащий» и варианты этого термина не предназначены для исключения других добавлений, компонентов, целых или этапов.
Краткое описание чертежей
Вышеуказанное, а также дополнительные цели, признаки и преимущества настоящего изобретения, будут более понятны из последующего иллюстративного и неограничивающего подробного описания вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции могут быть использованы для аналогичных элементов, и где:
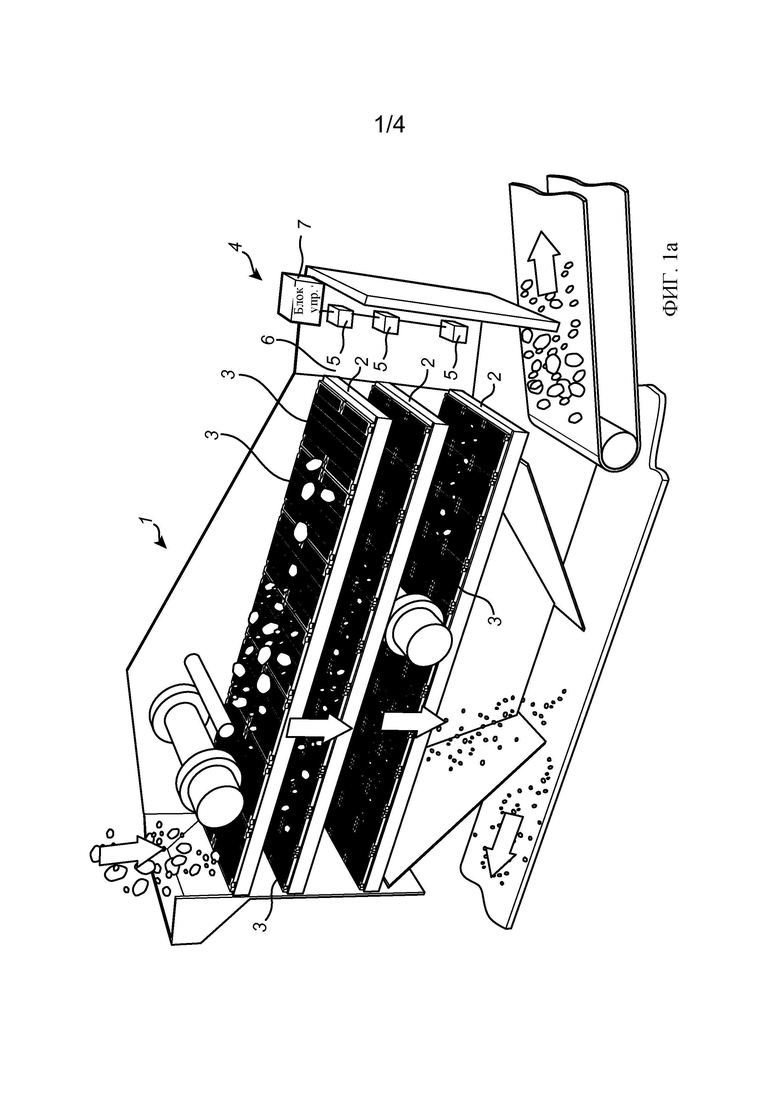
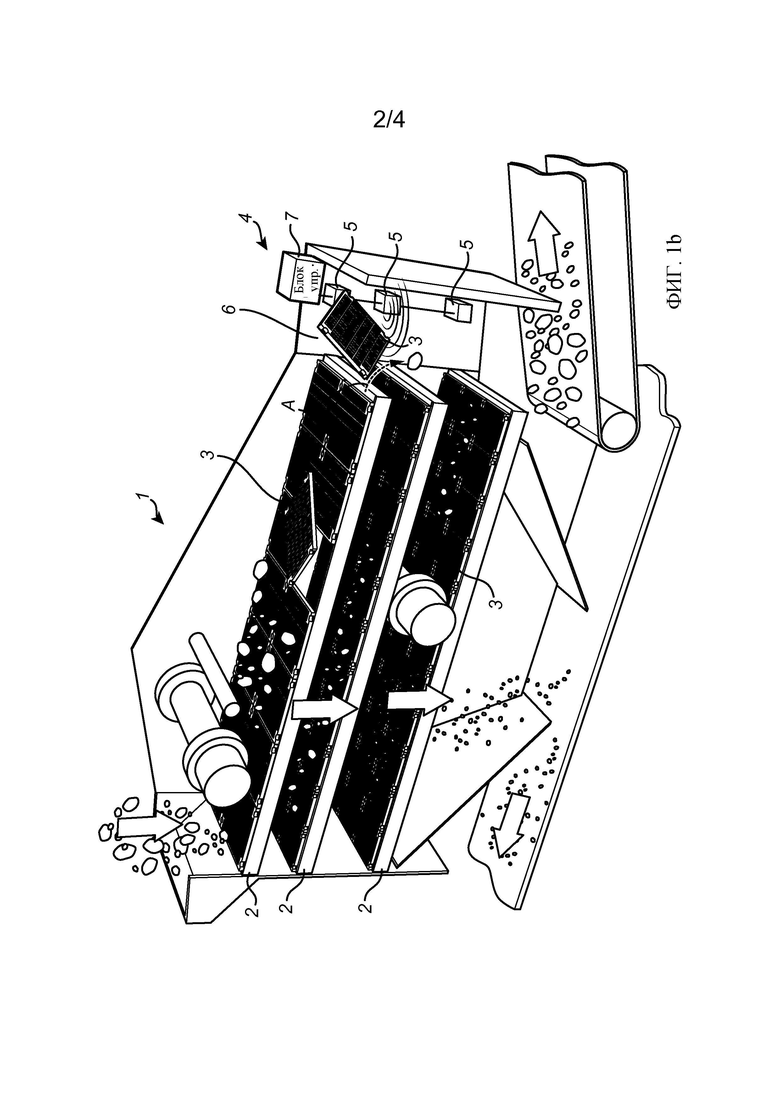
Фиг. 1а и 1b представляют виды в перспективе просеивающего устройства, оборудованного системой обнаружения, в соответствии с одним примером осуществления изобретения.
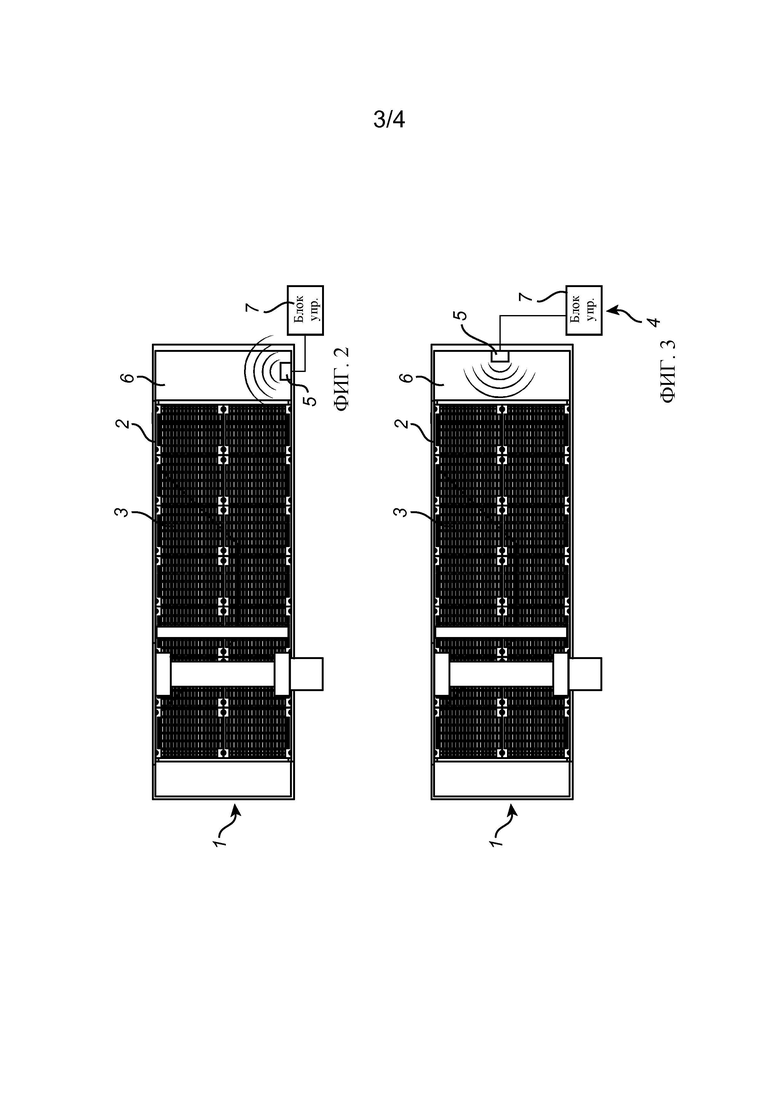
Фиг. 2 представляет вид сверху просеивающего устройства на фиг. 1а и 1b. Фиг. 3 представляет вид сверху просеивающего устройства, оборудованного системой обнаружения, в соответствии с другим примером осуществления изобретения.
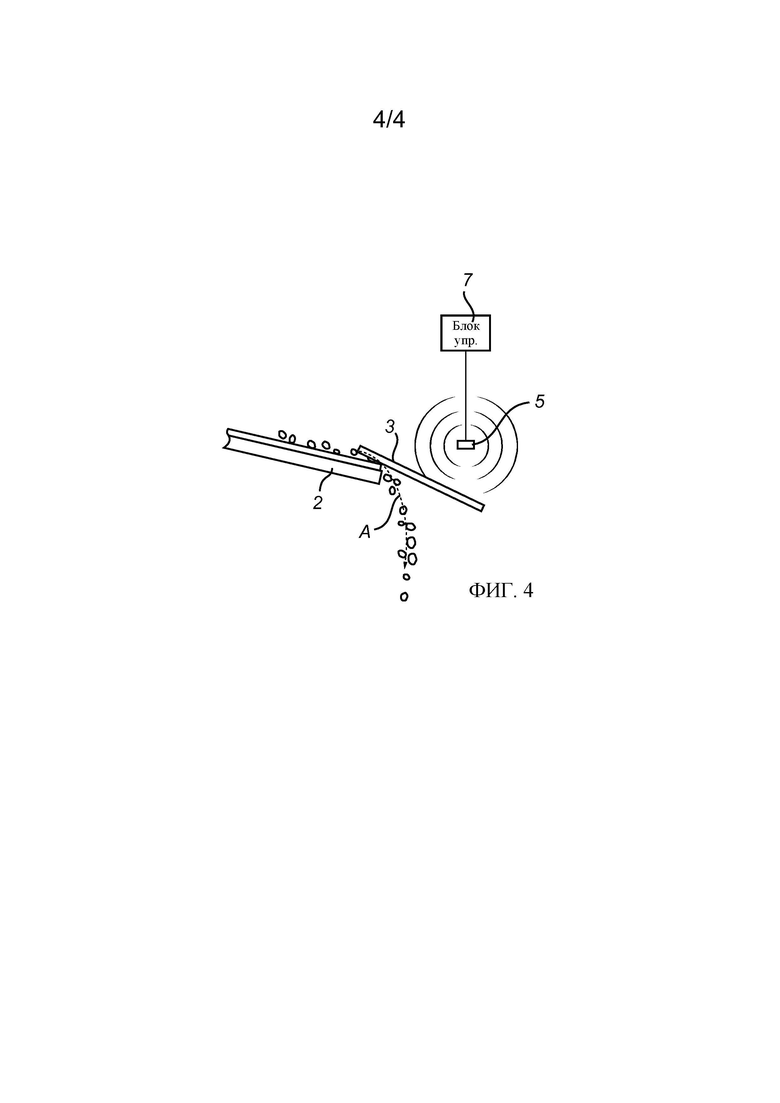
Фиг. 4 представляет увеличенный вид сбоку части просеивающего устройства, оборудованного системой обнаружения, в соответствии с одним примером осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления изобретение
На фиг. 1a, 1b и 4 показано просеивающее устройство 1, содержащее три просеивающих деки 2, каждая из которых состоит из множества просеивающих модулей 3. Каждый просеивающий модуль 3 имеет одну секцию с отверстиями. Секция с отверстиями имеет первую верхнюю поверхность, предназначенную для приема и переноса материала, подлежащего просеиванию, вторую нижнюю поверхность напротив первой поверхности и периферическую поверхность. Отверстия проходят от первой поверхности ко второй поверхности. Просеивающее устройство 1 оснащено системой 4 обнаружения, которая здесь содержит три датчика 5. Датчики 5, которые согласно примеру осуществления являются дальномерами ультразвукового типа, расположены таким образом, что они могут обнаруживать объекты, присутствующие вблизи выпуска 6 соответствующей просеивающей деки 2. В этом варианте осуществления (см. также фиг. 2) каждый датчик 5 прикреплен к боковой стенке, расположенной ниже просеивающих дек 2. Датчики 5 подключены к блоку 7 управления и выполнены с возможностью передавать сигналы в направлении, в общем перпендикулярном массовому потоку от просеивающих дек 2. Каждый из датчиков 5 расположен таким образом, что их соответствующий диапазон измерений находится за пределами баллистической траектории А отсортированного материала, когда он покидает выпуск 6 просеивающей деки, но все еще находится в области, в которой по меньшей мере часть отсоединенного просеивающего модуля 3 (или аналогичного) будет присутствовать после оставления выпуска просеивающей деки 2. Эта траектория может быть определена эмпирическими экспериментами или рассчитана заранее с учетом, например, рабочих параметров просеивающего устройства (амплитуды, частоты и т.д.), свойств сортируемого материала и свойств возможных инородных объектов (например, просеивающих модулей и элементов футеровки, используемых в просеивающем оборудовании). Однако во избежание пропуска любых инородных объектов в массовом потоке также возможно, и возможно предпочтительно, расположить датчики 5 таким образом, чтобы их диапазон измерений имел определенное перекрытие с баллистической траекторией А просеиваемого материала. Следовательно, блок 7 управления предпочтительно выполнен с возможностью различать сигналы датчиков 5, возникающие от просеиваемого материала, и сигналы датчиков 5, возникающие от инородного объекта, такого как перемещенный просеивающий модуль или элемент футеровки, предпочтительно путем применения заранее заданных пороговых значений. Пороговые значения могут, например, основываться на типе материала или размере материала, подлежащего просеиванию. Таким образом, поскольку просеивающие модули 3 изготовлены из другого материала и/или имеют больший размер, чем материал, который просеивается в просеивающем устройстве 1, они могут быть обнаружены системой 4 обнаружения при прохождении области, контролируемой датчиками 5. Как только просеивающий модуль 3 или подобный обнаружен, просеивающее устройство 1 может быть остановлено для технического обслуживания. Порог может также основываться на времени, в течение которого объект находится в диапазоне действия датчика 5. Поскольку элемент футеровки или просеивающий модуль 3 обычно имеют больший размер и изготавливаются из материалов, отличных от отсортированного материала, они будут присутствовать в диапазоне действия датчика/датчиков в течение более длительного времени, или по меньшей мере в течение другого периода времени, отличного от такового для частиц отсортированного материала. Следовательно, можно основывать пороговые значения на времени, в течение которого объект находится в диапазоне действия датчика/датчиков. Блок 7 управления также может, например, быть запрограммирован так, чтобы иметь разные пороговые значения, которые впоследствии могут использоваться для определения того, присутствует ли инородный объект в массовом потоке или нет. Пороговые уровни могут также или альтернативно основываться на размере или материале присутствующих объектов. Другими словами, блок 7 управления может быть выполнен с возможностью различать сигналы датчика 5, возникающие от материала, подлежащего просеиванию, и сигналы датчика, возникающие от инородного объекта, такого как перемещенный просеивающий модуль 3 или элемент футеровки, путем применения заранее заданных пороговых значений. Различные материалы будут отражать акустические волны по-разному, и объекты разного размера также будут отражать акустические волны по-разному. Следовательно, можно различить, например, просеивающий модуль, изготовленный, например, из покрытого резиной материала, и гравийные частицы, подлежащие просеиванию. Некоторые или все датчики 5 в соответствии с изобретением способны определять площадь обнаруживаемого объекта, и поскольку, например, просеивающий модуль в большинстве случаев будет иметь большую поверхность, чем частицы просеиваемого материала, будет возможно определить присутствие инородного объекта на основе площади объекта, который обнаруживается датчиком/датчиками. Эти пороговые значения могут использоваться по отдельности или в сочетании с одним или более другими. Также возможно выполнить блок управления таким образом, чтобы он учитывал показания множества датчиков 5. Например, обнаружение инородных объектов, выполняемое двумя или более датчиками 5, скорее всего будет более надежным, чем показание, произведенное одним датчиком 5.
Фиг. 3 иллюстрирует просеивающее устройство 1, оборудованное системой 4 обнаружения, в соответствии с другим примером осуществления изобретения. В этом варианте осуществления каждый датчик 5 прикреплен к боковой стенке напротив выпуска 6 просеивающей деки. При этом датчики 5 передают сигналы в направлении, в общем параллельном массовому потоку из просеивающих дек 2, а не в направлении, в общем перпендикулярном массовому потоку из просеивающих дек 2.
Фиг. 4 иллюстрирует деталь системы в соответствии с изобретением. Здесь более подробно раскрыто, как поток материала покидает наклонную просеивающую деку 2, и, как можно видеть, просеивающий модуль 3 отсоединился от просеивающей деки 2 и следует за потоком материала, покидающего просеивающую деку 2. Из-за своего размера просеивающий модуль 3 будет, по меньшей мере частично и по меньшей мере в течение определенного периода времени, выступать из потока материала, протекающего по траектории А. Это выступание просеивающего модуля 3 может быть обнаружено датчиком 5, как было раскрыто выше. На фиг. 4 датчик расположен, как показано на фиг. 1a, 1b и 3, т.е. он излучает в направлении, в общем перпендикулярном направлению массового потока.
Специалист в данной области техники понимает, что возможен ряд модификаций вариантов осуществления, описанных в данном документе, в пределах объема изобретения, который определен в прилагаемой формуле изобретения. Например, датчик может быть расположен на опорной конструкции, независимой от просеивающего устройства. В другом варианте осуществления датчик прикреплен к боковой стенке просеивающего устройства. Ультразвуковой датчик может быть пьезоэлектрическим или емкостным преобразователем. Наряду с ультразвуковыми датчиками, подходящие датчики включают в себя лазер, радар, сонар, лидар. Также было бы возможно использовать для этой цели фотограмметрию. Фотограмметрия подходит для применений, в которых необходимо обнаруживать и различать элементы, имеющие различные свойства (размер, цвет, скорость и т.д.), что делает ее полезной для настоящего изобретения. Также возможна комбинация различных типов датчиков. Специалист в данной области техники также понимает, что, хотя на чертежах указаны только две конвейерные ленты, конечно возможно, и часто предпочтительно, иметь дополнительные конвейерные ленты, контейнеры, желоба и т.п.Например, на фиг. 1а и 1b предпочтительнее использовать две дополнительные конвейерные ленты (или два дополнительных желоба или контейнера), чтобы сохранять поток из соответствующих просеивающих дек отделенным от других потоков. Также можно разместить два или более датчиков 5 ниже самой нижней просеивающей деки, чтобы иметь возможность обнаруживать инородные объекты, которые падают сквозь деку. Обычно просеивающие модули и другие инородные объекты будут транспортироваться вместе с просеянным материалом вдоль просеивающей деки, но нельзя исключать возможность падения их вниз, и, таким образом, один или более датчиков в этой позиции могут быть полезными. Несмотря на то, что система показана как содержащая три датчика, это не является необходимым требованием для осуществления изобретения. Один, два или более трех датчиков, конечно, также возможны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ ультразвукового детектирования | 2018 |
|
RU2771976C2 |
| СПОСОБ ПОДГОТОВКИ БУРОГО УГЛЯ | 2008 |
|
RU2484375C2 |
| Способ и система для обнаружения проводящих объектов | 2015 |
|
RU2708023C2 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
| УСТРОЙСТВО ДЛЯ СЪЕМКИ ИЗОБРАЖЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ИМ И НОСИТЕЛЬ ИНФОРМАЦИИ | 2009 |
|
RU2456654C2 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ РАБОЧИХ ХАРАКТЕРИСТИК МЕЛЬНИЦ | 2011 |
|
RU2555433C2 |
| СИСТЕМА В КОМПЛЕКСЕ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ, СОДЕРЖАЩЕЕ ЕЕ | 2021 |
|
RU2822054C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ И ПОРТАЛЬНЫЙ РАДИАЦИОННЫЙ МОНИТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384865C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ОТДЕЛЬНЫХ ОБЪЕКТОВ ИЗ СЫПУЧИХ МАТЕРИАЛОВ | 2011 |
|
RU2526103C1 |
Группа изобретений относится к системе обнаружения в просеивающем устройстве для просеивания материала, например агрегата, руды или подобного материала. Система содержит по меньшей мере одну просеивающую деку, которая имеет просеивающую поверхность, датчик, расположенный на по меньшей мере одной просеивающей деке или возле нее. Датчик конфигурирован так, что он способен обнаруживать объекты, покидающие просеивающую деку, датчик содержит ультразвуковой датчик. Система содержит блок управления, соединенный с датчиком и выполненный с возможностью различать сигналы датчика, возникающие из-за просеиваемого материала, и сигналы датчика, возникающие из-за инородного объекта, такого как перемещенный просеивающий модуль или элемент футеровки, путем применения одного или более заранее заданных пороговых значений, причем пороговое значение основано на времени, в течение которого объект находится в диапазоне действия датчика. Повышается эффективность обнаружения инородного объекта. 5 н. и 14 з.п. ф-лы, 5 ил.
1. Система (4) обнаружения в просеивающем устройстве (1) для просеивания материала, например агрегата, руды или подобного материала, содержащая по меньшей мере одну просеивающую деку (2), которая имеет просеивающую поверхность, при этом упомянутая система содержит датчик (5), расположенный на по меньшей мере одной просеивающей деке (2) упомянутого просеивающего устройства (1) или возле нее, отличающаяся тем, что упомянутый датчик (5) конфигурирован так, что он способен обнаруживать объекты, покидающие упомянутую по меньшей мере одну просеивающую деку (2), и упомянутый датчик (5) содержит ультразвуковой датчик, при этом упомянутая система (4) обнаружения также содержит блок (7) управления, соединенный с датчиком (5) и выполненный с возможностью различать сигналы датчика (5), возникающие из-за просеиваемого материала, и сигналы датчика (5), возникающие из-за инородного объекта, такого как перемещенный просеивающий модуль (3) или элемент футеровки, путем применения одного или более заранее заданных пороговых значений, причем пороговое значение основано на времени, в течение которого объект находится в диапазоне действия датчика (5).
2. Система (4) обнаружения в просеивающем устройстве (1) для просеивания материала, например агрегата, руды или подобного материала, содержащая по меньшей мере одну просеивающую деку (2), которая имеет просеивающую поверхность, при этом упомянутая система содержит датчик (5), расположенный на по меньшей мере одной просеивающей деке (2) упомянутого просеивающего устройства (1) или возле нее, отличающаяся тем, что упомянутый датчик (5) конфигурирован так, что он способен обнаруживать объекты, покидающие упомянутую по меньшей мере одну просеивающую деку (2), и упомянутый датчик (5) содержит ультразвуковой датчик, причем датчик (5) расположен с возможностью обнаруживать объекты, находящиеся за пределами заранее заданной области, прилегающей к выпуску по меньшей мере одной просеивающей деки (2).
3. Система по п. 1, в которой датчик (5) расположен с возможностью обнаруживать объекты, находящиеся за пределами заранее заданной области, прилегающей к выпуску по меньшей мере одной просеивающей деки (2).
4. Система по п. 2 или 3, в которой вышеуказанная область по меньшей мере частично определена баллистической траекторией (А).
5. Система по п. 4, в которой баллистическая траектория (А) имеет начальную точку на выпускном конце по меньшей мере одной просеивающей деки (2) или около него.
6. Система по любому из пп. 1-5, в которой датчик (5) представляет собой дальномер.
7. Система по любому из предыдущих пунктов, в которой упомянутый датчик (5) расположен на конструкции, независимой от просеивающего устройства (1).
8. Система по п. 2, которая дополнительно содержит блок (7) управления, который подключен к датчику (5).
9. Система по п. 1 или 8, в которой упомянутый блок (7) управления выполнен с возможностью управлять просеивающим устройством (1) на основе информации от датчика (5).
10. Система по п. 8, в которой упомянутый блок (7) управления выполнен с возможностью управлять просеивающим устройством (1) на основе информации от датчика (5), различать сигналы датчика (5), возникающие из-за просеиваемого материала, и сигналы датчика (5), возникающие из-за инородного объекта, такого как перемещенный просеивающий модуль (3) или элемент футеровки.
11. Система по п. 10, в которой блок (7) управления выполнен с возможностью различать сигналы датчика (5), возникающие из-за просеиваемого материала, и сигналы датчика (5), возникающие из-за инородного объекта, такого как перемещенный просеивающий модуль (3) или элемент футеровки, путем применения одного или более заранее заданных пороговых значений.
12. Система по п. 11, в которой пороговое значение основано на времени, в течение которого объект находится в диапазоне действия датчика (5).
13. Способ обнаружения объектов в просеивающем устройстве (1), содержащем одну или более просеивающих дек (2), причем упомянутый способ включает в себя передачу сигналов от датчика (5) в отношении массового потока из одной или более просеивающих дек (2), отличающийся тем, что способ содержит размещение упомянутого датчика (5) так, что он способен обнаруживать объекты, покидающие упомянутую по меньшей мере одну просеивающую деку (2), при этом упомянутый датчик (5) содержит ультразвуковой датчик, а упомянутая система (4) обнаружения также содержит блок (7) управления, соединенный с датчиком (5) и выполненный с возможностью различать сигналы датчика (5), возникающие из-за просеиваемого материала, и сигналы датчика (5), возникающие из-за инородного объекта, такого как перемещенный просеивающий модуль (3) или элемент футеровки, путем применения одного или более заранее заданных пороговых значений, причем пороговое значение основано на времени, в течение которого объект находится в диапазоне действия датчика (5).
14. Способ обнаружения объектов в просеивающем устройстве (1), содержащем одну или более просеивающих дек (2), причем упомянутый способ включает в себя передачу сигналов от датчика (5) в отношении массового потока из одной или более просеивающих дек (2), отличающийся тем, что способ содержит размещение упомянутого датчика (5) так, что он способен обнаруживать объекты, покидающие упомянутую по меньшей мере одну просеивающую деку (2), при этом упомянутый датчик (5) содержит ультразвуковой датчик, и способ также содержит определение области, примыкающей к выпуску по меньшей мере одной просеивающей деки (2), в пределах которой массовый поток просеянного материала предположительно будет обнаружен после выпуска из упомянутой по меньшей мере одной просеивающей деки (2), и размещение упомянутого датчика (5) таким образом, чтобы он мог обнаруживать объекты за пределами упомянутой области.
15. Способ по п. 13, дополнительно включающий в себя определение области, примыкающей к выпуску по меньшей мере одной просеивающей деки (2), в пределах которой массовый поток просеянного материала предположительно будет обнаружен после выпуска из упомянутой по меньшей мере одной просеивающей деки (2), и размещение упомянутого датчика (5) таким образом, чтобы он мог обнаруживать любые объекты за пределами упомянутой области.
16. Способ по п. 15, дополнительно включающий в себя задание пороговых значений и определение того, присутствует или нет инородный объект в упомянутом массовом потоке, путем применения упомянутых пороговых значений.
17. Способ по п. 16, дополнительно включающий в себя обеспечение наличия блока (7) управления, выполненного с возможностью принимать сигналы от датчика (5), и определение того, присутствует или нет инородный объект, такой как перемещенный просеивающий модуль (3) или элемент футеровки, в массовом потоке на основе сравнения сигналов, принятых упомянутым блоком (7) управления от упомянутого датчика (5), с упомянутыми пороговыми значениями.
18. Способ по п. 13 или 17, дополнительно включающий в себя управление рабочим параметром просеивающего устройства (1) на основе результата упомянутого сравнения сигналов, принятых упомянутым блоком (7) управления от упомянутого датчика (5), с упомянутыми пороговыми значениями.
19. Применение системы обнаружения по любому из пп. 1-12 в просеивающем устройстве (1), содержащем одну или более просеивающих дек (2), для обнаружения инородных объектов, присутствующих в массовом потоке просеиваемого материала.
| DE 19837466 C1, 11.11.1999 | |||
| Устройство для автоматического контроля работы грохота | 1989 |
|
SU1701399A1 |
| ПРОСЕИВАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2432214C2 |
| СПОСОБ СНИМАНИЯ ШКУР С УБИТЫХ ЖИВОТНЫХ | 1931 |
|
SU30568A1 |
| US 2014291213 A1, 02.10.2014. | |||

