Область техники, к которой относится изобретение
Настоящее изобретение относится к держателю инструмента, прикрепляемому одним концом к руке робота и содержащему клиновидные элементы, образующие фиксирующее устройство.
Уровень техники
Промышленные роботы широко используются в различных отраслях промышленности. Последние достижения в области вычислительной техники, искусственного интеллекта и сенсорных технологий открывают новые горизонты для робототехники. Некоторые роботы предназначены специально для выполнения конкретных задач, например, для покраски автомобилей. Другие являются роботами более общего типа, способными производить смену различных инструментов в соответствии с конкретными приложениями или конкретными задачами на соответствующих этапах работы робота. Роботизированная система, как правило, включает в себя компьютерную систему, работающую с программным обеспечением, которое конфигурирует, манипулирует и активирует работу манипулятора, удерживающего различные сменные инструменты. Обычно используется рычаг с определенной степенью свободы перемещения в пространстве, соединенный с манипулятором. Манипулятор может представлять собой усовершенствованный инструмент, управляющий и взаимодействующий с инструментами и датчиками, прикрепленными к манипулятору.
В контексте настоящего изобретения простой и сложный манипуляторы, так же как и простые инструменты, которые могут быть соединены с рукой робота и/или отсоединены от нее, будут обозначаться термином "инструмент". Кроме того, соединение руки робота с вышеуказанным "инструментом" осуществляется с помощью держателя инструмента, являющегося средством быстрой фиксации инструментов в руке робота или соответствующего освобождения инструментов из нее.
Робот может быть выполнен с возможностью автоматической смены инструментов. Например, соответствующие инструменты могут располагаться на подносе рядом с роботом. Рука робота может быть выполнена с возможностью перемещения над пустым контейнером и освобождения закрепленного инструмента перед перемещением к следующему контейнеру со следующим инструментом, а также закрепления следующего инструмента в руке робота и т.д.
Перемещение рук робота может быть травмоопасным для человека, если рука робота случайно ударит человека. Таким образом, промышленные роботы часто располагаются внутри ограждений, не позволяющих людям приблизиться к руке робота. Следствием этого является то, что люди не могут вмешиваться в работу робота или взаимодействовать с его операциями иначе как, например, с помощью подключенного компьютерного терминала, расположенного за пределами ограждения.
Компания Universal Robots в настоящее время разрабатывает коллаборативных роботов, которые не нужно размещать за ограждением. Если рука робота случайно приблизится на опасное расстояние к телу человека или какому-либо другому препятствию, расположенные в ней датчики обнаружат это, и движение руки робота автоматически прекратится. Такой робот может автоматически возобновить свою работу, когда препятствие/препятствия будут устранены. В такой рабочей среде человек может принимать участие в работе робота или находиться в коллаборативной связи с роботом, например, при выборе или смене соответствующих инструментов, и/или при запуске или изменении в компьютере соответствующих программ, управляющих действиями робота, его перемещениями и использованием соответствующих инструментов. Таким образом, человек-оператор может интерактивно вмешиваться в работу робота в зависимости от соответствующих потребностей или непредвиденных проблем, возникающих во время работы, которые человек-оператор может обнаружить, и т.д. В некоторых случаях такая возможность может расширить область применения и/или эксплуатационные возможности промышленного робота. Однако очевидно также, что коллаборативный робот может быть выполнен с возможностью работы в автономном режиме без вмешательства со стороны человека.
При использовании роботов, например, проблемой может являться точность позиционирования инструментов относительно обрабатываемой детали. Существуют определенные допуски по точности перемещения руки робота и позиционирования обрабатываемой детали, которые могут быть чрезвычайно строгими, если требуемая точность обработки детали является высокой. Та же самая проблема может возникать и в отношении работы с инструментами. Конструкция держателя инструмента должна быть приспособлена к той части инструмента, которую держатель инструмента охватывает и должен жестко удерживать во время работы инструмента. Напряжение на соединительной поверхности между инструментом и держателем инструмента может изменяться в различных направлениях в зависимости от того, каким образом рука робота перемещает инструмент. Это также зависит от того, как функционирует рабочее соединение между инструментом и обрабатываемой деталью. Например, при сверлении отверстий напряжение возникает в основном в вертикальном направлении, в то время как при операциях фрезерования, обрезки или резания и т.п.напряжения будут возникать почти во всех перпендикулярных направлениях и/или в любых ориентациях относительно оси инструмента. Точность работы инструмента может понижаться, если во время операций инструмент не будет жестко зафиксирован относительно держателя инструмента и руки робота.
В известном уровне техники имеются примеры конструкций держателя инструмента, пытающихся имитировать человеческую руку. Полезной особенностью искусственной руки является возможность получения от нее сигнала обратной связи, например, при перемещении держателя инструмента в положение, в котором рука может захватывать инструмент. Точность позиционирования не должна быть очень высокой, поскольку сигнал обратной связи, получаемый от руки при захвате инструмента, поможет роботу направить руку в правильное положение и окончательное оптимальное положение захвата. Однако искусственная рука может не обладать достаточной силой, чтобы выдерживать напряжение, возникающее на поверхности сопряжения между искусственной рукой и инструментом. Кроме того, конструкция искусственной человекообразной руки может быть очень сложной, и, следовательно, ее стоимость может быть очень высокой, что затрудняет применение искусственной руки в общих случаях. Искусственные руки, как правило, применяются для выполнения особых, специальных видов операций.
Еще одна проблема, связанная с держателем инструмента, используемым в коллаборативном роботе, заключается в том, что операция замены инструмента должна осуществляться человеком, а также устройством или блоком устройств, обеспечивающим выполнение функции блокирования и разблокирования держателя инструмента, управляемого роботом. Это означает, что рука человека, а также механическое, электронное и/или гидравлическое устройство в роботе или в руке робота, должны быть в состоянии выполнять операции закрепления инструмента в держателе инструмента или освобождения инструмента из него.
В патентном документе US 4636135 A раскрывается держатель инструмента B, предназначенный для захвата, удержания и замены инструментов промышленного робота, который может крепиться к поворотному шарниру (5) запястья руки робота. Держатель B инструмента содержит верхнюю часть C, прикрепляемую к поворотному шарниру (5) запястья руки робота, и нижнюю часть D, к которой прикрепляется инструмент. Нижняя часть D содержит выступающий наружу рычаг, заканчивающийся шаровидным элементом, вставляемым в соответствующую цилиндрическую полость верхней части C, содержащей устройство для захвата шаровидного элемента. Захват может осуществляться с помощью гидроприводов. Останов или реверсирование гидропривода может обеспечивать разблокировку захвата. Таким образом, инструмент может быть заблокирован в руке робота или разблокирован из нее путем активации/деактивации блокирующего/разблокирующего устройства.
Проблема, связанная с конструкцией держателя инструмента коллаборативного робота, заключается в том, что операции блокирования и разблокирования должны быть простыми и легкими. Сила, прикладываемая рукой человека к блокирующему устройству, должна быть небольшой, в то время как блокирующее устройство должно выдерживать любые колебания прикрепленного инструмента при его использовании. Кроме того, жесткий захват, предотвращающий колебания/биение инструмента, не должен заклинивать блокирующее устройство в заблокированном состоянии, т.е. не должен препятствовать его разблокированию, т.е. отделению инструмента от руки робота. Таким образом, независимо от типа операции, выполняемой роботом, держатель инструмента должен обеспечивать возможность легкого блокирования и разблокирования инструмента, и в то же время обеспечивать жесткий захват и фиксацию инструмента с предотвращением любых колебаний инструмента, удерживаемого держателем инструмента, относительно руки робота.
Как известно, в уровне техники широко применяются различные ручные электроприводные инструменты, например, дрели и т.д. В пределах объема настоящего изобретения те же самые конструктивные принципы, используемые для держателя инструмента руки робота согласно настоящему изобретению, могут быть применены для ручных дрелей или любых других электроприводных ручных инструментов.
Те же самые конструктивные принципы, применяемые для держателя инструмента руки робота согласно настоящему изобретению, могут быть использованы в машинах любого типа, в которых происходит замена одного изделия таким же изделием или любым другим изделием из множества различных изделий.
Таким образом, существует потребность в усовершенствованном держателе инструмента.
Задача изобретения
Задачей настоящего изобретения является обеспечение альтернативы известному уровню техники.
В частности, задачей настоящего изобретения можно считать создание держателя инструмента, обеспечивающего возможность быстрой и легкой смены инструментов, которые держатель инструмента удерживает посредством сопряжения двух частей держателя инструмента, которые могут блокироваться/разблокироваться с помощью клиновидных элементов, расположенных между двумя указанными частями.
Раскрытие сущности изобретения
Задачей настоящего изобретения является создание держателя инструмента, содержащего первую часть и вторую часть, поверхности которых обращены друг к другу;
при этом ответные клиновидные элементы, расположенные, соответственно, на первой части и на второй части, могут соединяться друг с другом и функционировать как разъединяемое фиксирующее устройство.
Таким образом, вышеуказанная задача и несколько других задач решены в первом аспекте изобретения путем обеспечения держателя инструмента, содержащего первую часть и вторую часть, соединяемые друг с другом и отделяемые друг от друга посредством взаимодействия первой поверхности первой части и второй поверхности второй части, к которой она обращена в рабочем состоянии;
при этом наружу от первой поверхности выступает клиновидный элемент;
при этом на второй поверхности имеется клиновидное углубление, выполненное с возможностью приема выступающего клиновидного элемента, расположенного на первой поверхности, при соединении в рабочем состоянии первой и второй поверхностей друг с другом;
причем продольная длина выступающего элемента, расположенного на первой поверхности, равна по меньшей мере одной ширине первой поверхности;
при этом соответствующая продольная длина углубления, расположенного на второй поверхности, соответствует продольной длине выступающего элемента, расположенного на первой поверхности, причем указанная соответствующая длина второй поверхности также равна по меньшей мере одной ширине второй поверхности;
при этом продольные боковые поверхности выступающего элемента, расположенного на первой поверхности, наклонены внутрь, причем угол их внутреннего наклона соответствует углу внутреннего наклона продольных боковых поверхностей углубления, расположенного на второй поверхности.
Каждый из соответствующих отличительных признаков настоящего изобретения может быть объединен с любым из других отличительных признаков. Вышеуказанные и другие отличительные признаки настоящего изобретения станут более ясными и понятными после ознакомления с приведенным ниже подробным описанием возможных вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Ниже приведено более подробное описание держателя инструмента согласно настоящему изобретению со ссылками на прилагаемые чертежи. Прилагаемые чертежи служат лишь для иллюстрации возможных вариантов осуществления настоящего изобретения и никоим образом не ограничивают какие-либо другие возможные варианты осуществления изобретения, охватываемые объемом формулы изобретения.
На фиг. 1 показан пример варианта выполнения устройства согласно настоящему изобретению;
на фиг. 2a - первая часть варианта выполнения устройства согласно настоящему изобретению;
на фиг. 2b - вторая часть варианта выполнения устройства согласно настоящему изобретению;
на фиг. 3 - вариант устройства согласно настоящему изобретению в сборе;
на фиг. 4 - дополнительные подробности варианта выполнения устройства согласно настоящему изобретению.
Осуществление изобретения
Хотя настоящее изобретение описывается на примере рассматриваемых вариантов его осуществления, его не следует рассматривать как каким-либо образом ограниченное данными вариантами. Объем настоящего изобретения определяется исключительно прилагаемой формулой изобретения. В контексте формулы изобретения термины "содержит" или "содержащий" не исключают возможности присутствия в конструкции каких-либо других элементов. Применение в английском варианте описания неопределенного артикля "a" или "an" и т.д. не следует истолковывать как исключающее множественность. Указание в формуле изобретения ссылочных позиций, приведенных на чертежах, также не следует истолковывать как ограничивающее объем изобретения. Кроме того, отдельные отличительные признаки, указанные в различных пунктах формулы, могут быть успешно объединены, и указание этих отличительных признаков в различных пунктах формулы не исключает возможность их успешного объединения.
Как известно из существующего уровня техники, выполнение соответствующих операций инструментом, управляемым рукой робота, обычно требует подачи электрической энергии, и/или рабочей жидкости, и/или сжатого воздуха и т.д. Обычно эта энергия подается по роботу и по руке робота, причем в компьютерных программах, управляющих перемещениями руки робота, может быть дополнительно предусмотрена возможность регулирования электрического тока, расхода рабочей жидкости или сжатого воздуха и т.д., чтобы таким образом осуществлять управление параметрами работы инструмента.
Как показано на фиг. 3, держатель 10 инструмента согласно настоящему изобретению содержит первую часть 10a и вторую часть 10b, блокируемые вместе посредством сопряжения первой поверхности первой части 10a, обращенной ко второй поверхности второй части 10b. Первая часть 10a, например, может быть соединена с рукой робота, а вторая часть 10b может быть соединена с инструментом, или наоборот.
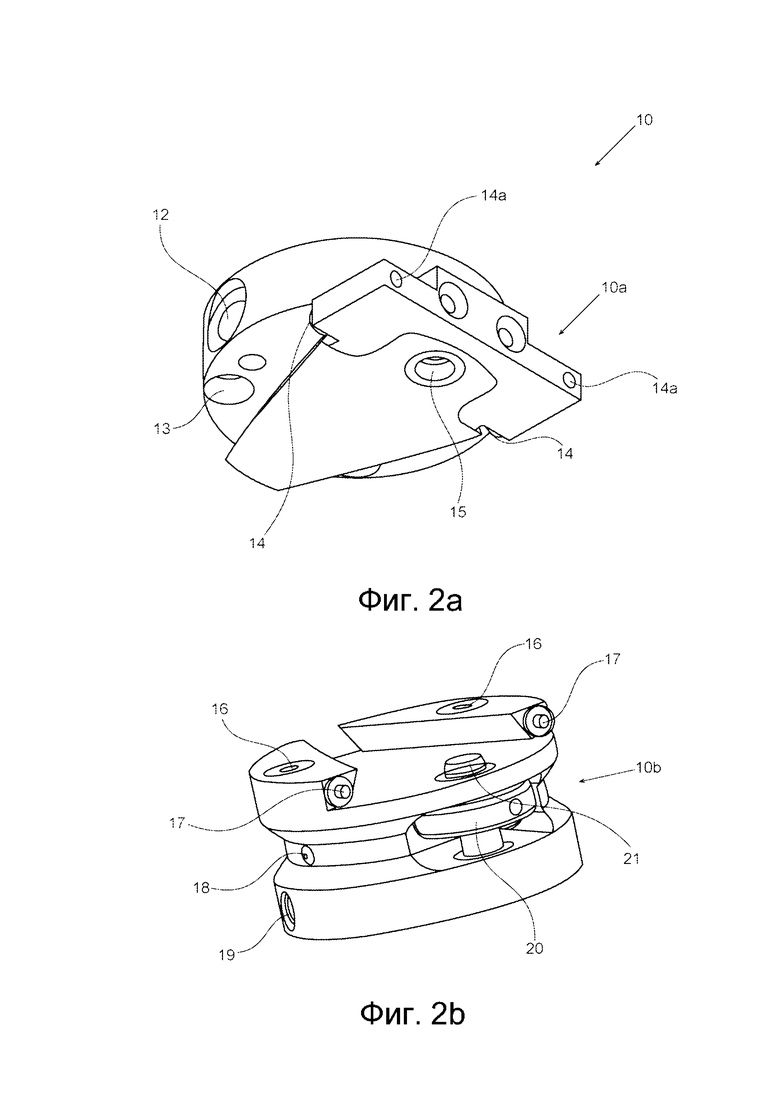
На фиг. 2a более подробно показан вариант выполнения первой части 10a, а на фиг. 2b - вариант выполнения второй части 10b.
Подача электроэнергии, рабочей жидкости, сжатого воздуха и т.д. является способом передачи энергии в различных формах, пригодных для разных применений соответствующих инструментов. Электричество, например, может использоваться для вращения ротора электродвигателя. Путем изменения количества подаваемой электроэнергии можно регулировать частоту вращения и/или увеличивать крутящий момент электродвигателя и т.д. То же самое относится и к другим видам энергии. В нижеприведенном описании термин "подаваемая к инструменту энергия" не является ограничивающим и относится к различным видам энергии, указанным выше.
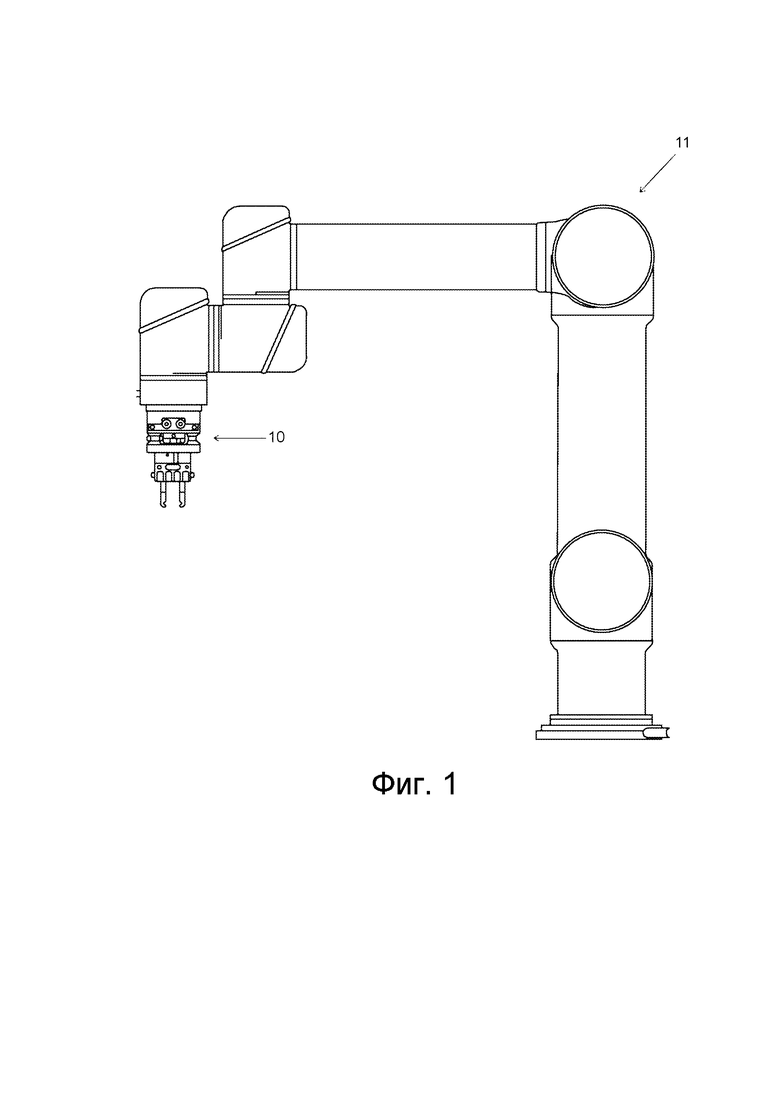
На фиг. 1 показан пример руки 11 робота, содержащей держатель 10 инструмента согласно настоящему изобретению. Держатель инструмента расположен между дальним концом руки робота и самим инструментом.
Любая передача подаваемой энергии может происходить через держатель 10 инструмента, и/или по трубкам, и/или электрическим кабелям (не показаны) в обход держателя 10 инструмента. Если инструмент крепится к руке робота с помощью держателя 10 инструмента, устройство блокирования/разблокирования может ускорить и упростить соединение соответствующих трубок и кабелей и т.п.
Показанный на фиг. 1 держатель 10 инструмента содержит две части, а именно: первую часть 10a, показанную на фиг. 2a, и вторую часть 10b, показанную на фиг. 2b. На рассматриваемых совместно фиг. 2a и 2b показан держатель 10 инструмента в состоянии, в котором первая и вторая части разблокированы и отделены друг от друга. На фиг. 3 держатель инструмента показан в состоянии, в котором первая часть 10a и вторая часть 10b соединены друг с другом и заблокированы.
Как показано на фиг. 2a, первая часть 10a имеет отверстие 12, которое расположено на боковой поверхности корпуса первой части 10a и может выполнять функцию входного отверстия. Во входное отверстие 12 могут подаваться такие текучие среды, как рабочая жидкость или сжатый воздух, вода под давлением и т.д. Входное отверстие 12 может сообщаться с выходным отверстием 13, расположенным на первой поверхности (например, на нижней поверхности) первой части 10a, посредством канала, проходящего внутри корпуса первой части 10a.
Как показано на фиг. 2b, вторая часть 10b имеет отверстие 16, которое расположено на второй поверхности (например, на верхней поверхности) корпуса второй части 10b и может выполнять функцию входного отверстия. Во входное отверстие 16 могут поступать такие текучие среды, как рабочая жидкость или сжатый воздух, вода под давлением и т.п.Входное отверстие 16 может сообщаться с выходным отверстием 19, расположенным на боковой поверхности второй части 10b, посредством канала, проходящего внутри корпуса второй части 10b.
При соединении двух частей 10a и 10b друг с другом, как показано на фиг. 3, выходное отверстие 13, расположенное на первой поверхности первой части 10a, будет расположено над входным отверстием 16, расположенным на второй поверхности второй части 10b. Таким образом, образуется открытый путь прохождения жидкости из входного отверстия 12, расположенного на боковой поверхности корпуса первой части 10a, в выходное отверстие 19, расположенное на боковой поверхности корпуса второй части 10b.
Если, например, первая часть 10a соединена с рукой 11 робота, система может содержать трубку, соединяющую робота с входным отверстием 12.
Если, например, вторая часть 10b соединена с инструментом, требующим подачи рабочей жидкости для работы, трубка может быть соединена с выходным отверстием 19 и затем с инструментом, соединенным со второй частью 10b.
Одна из причин выполнения робота с возможностью подачи рабочей жидкости заключается в том, что робот может быть выполнен с возможностью регулирования расхода подачи рабочей жидкости от робота к инструменту. Подачу рабочей жидкости можно включать или выключать, расход и объем подаваемой рабочей жидкости можно регулировать и т.д.
Как показано на фиг. 2a, в первой части могут быть предусмотрены отверстия 14a для прокладки электропроводки, предназначенной для подачи электрических сигналов, например, противоположной полярности. Эти линии электропроводки проходят сквозь корпус первой части 10a до противоположной стороны корпуса, где расположены электрические контакты 14.
Как показано на фиг. 2b, в соответствующих местах корпуса второй части 10b расположены электрические контактные штыри 17. Контактные штыри 17 соединены с электрическими сигнальными линиями, расположенными внутри корпуса второй части, и могут соединяться с инструментом (не показан), присоединяемым ко второй части 10b. Когда первая и вторая части 10a и 10b соединены друг с другом, между точкой 14a контакта, расположенной на первой части, и инструментом, соединенным со второй частью 10b, возникает электрическое соединение.
В варианте осуществления изобретения, показанном на фиг. 2a, имеется клиновидный выступ или элемент, выступающий наружу от первой поверхности первой части 10a и проходящий по диагонали первой поверхности. На второй поверхности второй части 10b имеется соответствующий клиновидный элемент или углубление, углубленное относительно второй поверхности второй части 10b и проходящее по диагонали второй поверхности второй части 10b.
Эти клиновидные элементы проходят по всей диагонали первой и второй поверхностей. Эти клиновидные элементы также обрезаны с обеих сторон клиновидных средств. Таким образом, на одном конце выступающего клиновидного элемента торцевая поверхность будет меньше, чем на противоположном конце данного выступающего клиновидного элемента. Соответственно, один конец клиновидного углубления второй части 10b уже, чем его противоположный конец.
Продольные боковые поверхности выступающего клиновидного элемента, расположенного на первой поверхности первой части 10a, наклонены внутрь.
Углубление, выполненное на второй поверхности второй части 10b, имеет соответствующую форму. Боковые поверхности углубления наклонены под таким же углом, что и боковые поверхности выступающего клиновидного элемента первой части 10a.
Таким образом, при соединении друг с другом первой и второй частей 10a, 10b держателя 10 инструмента, клиновидный выступ первой части 10a вставляется меньшей торцевой поверхностью в широкую часть клиновидного углубления второй части 10b. Когда вышеуказанный выступ будет полностью вставлен в вышеуказанное углубление, первая часть 10a будет установлена на второй части 10b и отцентрирована относительно нее. Наклонные поверхности удерживают обе части так, что они соединены друг с другом.
Блокирование, т.е. жесткое удержание двух вышеуказанных частей в соединении друг с другом, осуществляется с помощью выступающего наружу подпружиненного фиксирующего штифта 21, расположенного на широкой стороне клиновидного углубления. При вставке первой части 10a выступающий элемент первой части 10a входит в контакт с фиксирующим штифтом 21 и вдавливает его внутрь, сжимая вышеуказанную пружину фиксирующего штифта 21.
Когда первая часть 10a будет полностью вставлена, фиксирующий штифт 21 будет расположен под соответствующим отверстием 15, выполненным в корпусе первой части 10a. Пружина, контактирующая с фиксирующим штифтом 21, вытолкнет его вверх, и фиксирующий штифт 21 войдет в соответствующее отверстие 15. Наклонные боковые поверхности клиновидных элементов и приведенный в действие фиксирующий штифт 21 будут удерживать первую часть 10a и вторую часть 10b жестко соединенными друг с другом. Из этого следует, что с помощью держателя 10 инструмента согласно настоящему изобретению инструмент может быть прикреплен к руке робота.
Технический эффект наличия наклонных боковых поверхностей у клиновидных элементов заключается в том, что, когда выступ первой части 10a входит в клиновидное углубление, наклон боковых поверхностей взаимодействующих клиновидных элементов заставляет эти элементы приближаться друг к другу. Когда выступ первой части 10a полностью вставлен, наклон боковых поверхностей обеспечивает полный контакт выступа первой части 10a с нижней поверхностью углубления.
При разблокировании и отделении первой части 10a от второй части 10b держателя 10 инструмента, как показано на фиг. 2b, внутри открытой полости, расположенной на боковой поверхности корпуса второй части 10b, виден цилиндрический элемент 20, окружающий фиксирующий штифт 21. Этот цилиндрический элемент 20 является фиксатором. Когда фиксатор 20 оттягивается вниз, фиксирующий штифт 21 также вытягивается вниз из соответствующего отверстия 15 первой части 10a. После этого первая часть 10a держателя инструмента может быть отделена от второй части 10b держателя инструмента путем выталкивания выступающего клиновидного элемента из клиновидного углубления. Из этого следует, что с помощью держателя инструмента согласно настоящему изобретению инструмент может быть отделен от руки робота.
Как показано на фиг. 2b, на боковой поверхности корпуса второй части 10b предусмотрена защитная кнопка 18. Это фиксирующий штифт, предотвращающий случайное задействование фиксатора. Например, если рука человека приводит в действие фиксатор 20, вторая рука или палец должны нажать на защитную кнопку 18, чтобы обеспечить возможность оттянуть фиксатор 20 вниз.
Приведение в действие фиксатора 20 и защитной кнопки 18 также может производиться, например, с помощью гидроприводных рычагов, управляемых роботом. Также может быть предусмотрен другой робот, служащий для управления фиксатором 20 и защитной кнопкой 18. В таком случае один робот может помогать другому роботу.
Когда выступающий клиновидный элемент первой части 10a находится внутри клиновидного углубления второй части 10b, перемещение этих двух клиновидных элементов относительно друг друга в продольном направлении может приводить к перемещению этих двух элементов ближе друг к другу внутри клиновидной формы. Это может приводить к заклиниванию или может по меньшей мере затруднять отделение одного клиновидного элемента от другого при разблокировании держателя инструмента, таким образом, что для этого потребуется определенное усилие.
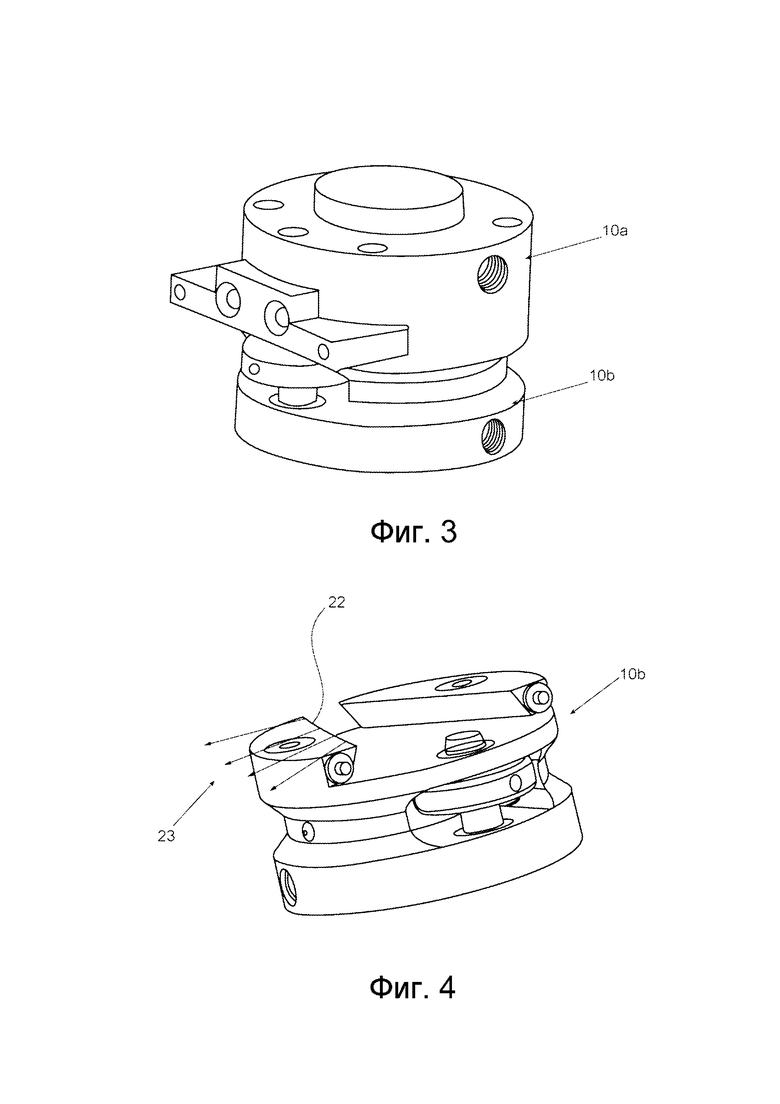
Если держатель инструмента, т.е. прикрепленный инструмент, работает в среде, в которой на держатель инструмента действуют небольшие силы, такая проблема может не возникать. Однако при высоком риске заклинивания держателя инструмента предлагается вариант выполнения держателя инструмента, показанный на фиг. 4, который уменьшает любую возможность его заклинивания.
Как показано на фиг. 4, наклонные боковые поверхности (периферия) 22 углубления второй поверхности второй части 10b имеют кривизну, создающую выпуклую боковую поверхность на одной стороне, и изменяющую направление на обратное на другой стороне углубления вдоль продольного направления углубления. На фиг. 4 изображено множество векторов 23, перпендикулярных выпуклой боковой стороне (периферии) 22 одной из боковых сторон углубления. Когда выступ с соответствующей изогнутой боковой поверхностью (периферией) вступает в полный контакт с боковыми поверхностями углубления и перемещается в плоскости второй поверхности второй части 10b, перемещения останавливаются боковыми поверхностями, и усилия передаются на корпус второй части 10b. Перемещение выступа может происходить во многих направлениях. Если боковые поверхности (периферия) 22 углубления выполнены прямыми, все векторы 23 будут параллельны друг другу.
При разложении вектора силы, действующей на корпус второй части 10b, например, вследствие перемещения выступа внутри углубления в направлении, не совпадающем с направлением одного из векторов 23, составляющая вектора силы будет направлена параллельно боковым поверхностям выступа и углубления. Если боковые поверхности 22 являются плоскими, составляющая вышеупомянутой силы, направленная вдоль боковой поверхности, может выдвигать выступ из клиновидного углубления или задвигать выступ в него. При перемещении выступа внутрь клиновидного углубления может происходить заклинивание. И наоборот, вышеупомянутая сила может выдвигать выступ из клиновидного углубления, что может приводить к нестабильной блокировке держателя инструмента.
Если боковая поверхность (периферия) 22 является криволинейной, т.е. выпуклой, разложение вектора вышеупомянутой силы будет приводить к тому, что в направлении вдоль границы между выступом и углублением будут направлены разные по величине составляющие вектора силы. Это обусловлено тем, что векторы 23, как показано на фиг. 4, будут направлены в разных направлениях. Сила, действующая со стороны выступа поверхность контакта и действующая в направлении вектора 23, будет полностью воспринята корпусом второй части 10b. При наличии угла между действующей силой и векторами 23, некоторые векторы будут более параллельны направлению вектора действующей силы, чем другие. Таким образом, более параллельные векторы указывают на то, что на этих участках боковой поверхности (периферии) 22 будут передаваться силы, действующие на корпус второй части 10b в разных направлениях.
Технический эффект наличия изогнутой боковой поверхности (периферии) 22 клиновидных элементов заключается в том, что держатель инструмента становится более устойчивым, т.е. обеспечивается меньшая вероятность колебаний держателя инструмента и меньшая вероятность его заклинивания. Это обеспечивает более удобную для управления рукой человека конструкцию держателя инструмента, а также обеспечивает автономность операций блокирования/разблокирования, выполняемых, например, самим роботом или расположенным рядом роботом.
Дополнительный технический эффект клиновидных элементов заключается в том, что позиционирование первой части 10a относительно второй части 10b держателя инструмента при подсоединении инструмента не должно быть очень точным. Более широкая часть углубления второй части 10b, по сравнению с торцевой поверхностью выступа первой части 10a, которая имеет меньшую ширину или меньший размер и вставляется в более широкую часть углубления, требует меньшей точности. Кроме того, наклонные боковые поверхности клиновидных элементов направляют первую часть 10a ко второй части 10b, а, следовательно, относительная разность по высоте между первой частью 10a и второй частью 10b в начале соединения также требует меньшей точности.
Согласно примеру осуществления настоящего изобретения, держатель 10 инструмента содержит первую часть 10a и вторую часть 10b, соединяемые вместе и отделяемые друг от друга посредством взаимодействия первой поверхности первой части 10a и второй поверхности второй части 10b, к которой она обращена в рабочем состоянии;
- при этом наружу от первой поверхности выступает клиновидный элемент;
- при этом на второй поверхности имеется клиновидное углубление, выполненное с возможностью приема выступающего клиновидного элемента, расположенного на первой поверхности, при соединении в рабочем состоянии первой и второй поверхностей друг с другом;
- причем продольная длина выступающего элемента, расположенного на первой поверхности, равна по меньшей мере одной ширине первой поверхности;
- при этом соответствующая продольная длина углубления, расположенного на второй поверхности, соответствует продольной длине выступающего элемента, расположенного на первой поверхности, причем указанная соответствующая длина второй поверхности также равна по меньшей мере одной ширине второй поверхности;
- при этом продольные боковые поверхности выступающего элемента, расположенного на первой поверхности, наклонены внутрь, причем угол их внутреннего наклона соответствует углу внутреннего наклона продольных боковых поверхностей углубления, расположенного на второй поверхности.
Кроме того, заостренный конец клиновидного элемента может быть усечен, образуя тем самым меньшую торцевую поверхность на одном конце по сравнению с большей торцевой поверхностью на конце, противоположном усеченному заостренному концу.
Кроме того, ответное клиновидное углубление, расположенное на второй поверхности второй части 10b, может быть усечено в соответствии с усеченным клиновидным выступом первой части 10a.
Кроме того, соответствующие боковые поверхности клиновидных элементов могут быть выполнены с наклоном.
Кроме того, боковые поверхности (периферия) 22 боковых поверхностей клиновидных элементов могут быть прямыми.
Кроме того, боковые поверхности (периферия) 22 боковых поверхностей клиновидных элементов могут быть изогнутыми.
Кроме того, внутри углубления, расположенного на второй поверхности, может быть предусмотрен подпружиненный фиксирующий штифт 21.
Кроме того, в клиновидном элементе первой части 10a имеется фиксирующее отверстие 15, которое может быть выполнено с возможностью приема фиксирующего штифта 21 при соединении первой части 10a и второй части 10b.
Кроме того, на боковой поверхности корпуса второй части 10b расположена защитная кнопка 18, служащая для предотвращения случайного выхода фиксирующего штифта 21 из соответствующего фиксирующего отверстия 15.
Кроме того, на боковой поверхности корпуса первой части 10a может быть выполнено по меньшей мере одно входное отверстие 12, сообщенное по текучей среде с выходным отверстием 13, расположенным на первой поверхности первой части 10a.
Кроме того, на второй поверхности второй части 10b может быть выполнено по меньшей мере одно входное отверстие 16, сообщенное по текучей среде с выходным отверстием, расположенным на боковой поверхности корпуса второй части 10b;
причем, когда первая часть 10a соединена со второй частью 10b, выходное отверстие 13 первой части 10a сообщено по текучей среде с входным отверстием 16, расположенным на второй поверхности второй части 10b.
Кроме того, когда первая часть 10a соединена со второй частью 10b, по меньшей мере одна точка 14 электрического контакта первой части 10a может быть электрически соединена с соответствующей по меньшей мере одной точкой 17 электрического контакта второй части 10b.
Кроме того, компьютер может быть выполнен с возможностью управления текучими средами и/или электрической энергией, подаваемыми к присоединенному инструменту держателя инструмента.
Кроме того, держатель инструмента может присоединяться к ручной дрели.
Кроме того, держатель инструмента может присоединяться к машине в случае необходимости замены предмета предметом такого же типа или любым другим предметом из множества различных предметов.
Изобретение относится к области машиностроения и может быть использовано в конструкции быстросменных держателей инструмента, устанавливаемых, в частности, на руке робота. Держатель содержит первую и вторую части, выполненные с возможностью соединения друг с другом и отделения друг от друга посредством взаимодействия первой поверхности первой части и второй поверхности второй части, к которой она обращена в рабочем состоянии, при этом на первой поверхности расположен выступающий наружу клиновидный элемент, а на второй поверхности выполнено клиновидное углубление с возможностью приема выступающего клиновидного элемента при соединении в рабочем состоянии первой и второй поверхностей друг с другом. Кроме того, продольные боковые поверхности выступающего клиновидного элемента наклонены внутрь под углом, который соответствует углу наклона продольных боковых поверхностей углубления. Упомянутые поверхности выполнены изогнутыми в продольном направлении. Использование изобретения позволяет упростить процесс смены инструментов. 2 н. и 9 з.п. ф-лы, 4 ил.
1. Держатель (10) инструмента, содержащий первую часть (10a) и вторую часть (10b), выполненные с возможностью соединения друг с другом и отделения друг от друга посредством взаимодействия первой поверхности первой части (10a) и второй поверхности второй части (10b), к которой она обращена в рабочем состоянии, при этом
на первой поверхности расположен выступающий наружу клиновидный элемент, а
на второй поверхности выполнено клиновидное углубление с возможностью приема выступающего клиновидного элемента, расположенного на первой поверхности, при соединении в рабочем состоянии первой и второй поверхностей друг с другом, причем
продольная длина выступающего клиновидного элемента, расположенного на первой поверхности, равна по меньшей мере одной ширине первой поверхности,
продольная длина углубления, расположенного на второй поверхности, соответствует продольной длине выступающего клиновидного элемента, расположенного на первой поверхности, при этом указанная длина второй поверхности равна по меньшей мере одной ширине второй поверхности,
причем продольные боковые поверхности выступающего клиновидного элемента, расположенного на первой поверхности, наклонены внутрь, а угол их наклона соответствует углу наклона продольных боковых поверхностей углубления, расположенного на второй поверхности, при этом
наклонные боковые поверхности выступающего клиновидного элемента, расположенного на первой поверхности первой части (10a), выполнены изогнутыми в продольном направлении, и наклонные боковые поверхности углубления, расположенного на второй поверхности второй части (10b), выполнены изогнутыми в продольном направлении.
2. Держатель инструмента по п. 1, в котором клиновидное углубление, расположенное на второй поверхности второй части (10b), имеет первую часть меньшего размера на своем первом конце, расположенном на боковой поверхности корпуса второй части (10b), и вторую часть большего размера, чем первая часть, которая расположена на противоположном, втором конце указанного клиновидного углубления, расположенном на боковой поверхности корпуса второй части (10b).
3. Держатель инструмента по п. 2, в котором размеры выступающего клиновидного элемента на первой стороне первой части (10a) соответствуют размерам первой и соответствующей второй частей клиновидного углубления, расположенного на второй поверхности второй части (10b).
4. Держатель инструмента по п. 2, в котором в углублении, расположенном на второй поверхности второй части (10b), установлен подпружиненный фиксирующий штифт (21), расположенный со стороны второй, более широкой, части клиновидного углубления.
5. Держатель инструмента по п. 4, в котором в выступающем клиновидном элементе первой части (10a) выполнено фиксирующее отверстие (15) с возможностью приема фиксирующего штифта (21) при соединении первой части (10a) и второй части (10b) в заблокированном положении.
6. Держатель инструмента по п. 5, в котором на боковой поверхности корпуса второй части (10b) расположена защитная кнопка (18), выполненная с возможностью предотвращения случайного выхода фиксирующего штифта (21) из соответствующего фиксирующего отверстия (15).
7. Держатель инструмента по п. 1, в котором на боковой поверхности корпуса первой части (10a) выполнено по меньшей мере одно входное отверстие (12), связанное по текучей среде с выходным отверстием (13), расположенным на первой поверхности первой части (10a).
8. Держатель инструмента по п. 7, в котором на второй поверхности второй части (10b) выполнено по меньшей мере одно входное отверстие (16), связанное по текучей среде с выходным отверстием, расположенным на боковой поверхности корпуса второй части (10b),
причем, когда первая часть (10a) соединена со второй частью (10b), выходное отверстие (13) первой части (10a) связано по текучей среде с входным отверстием (16), расположенным на второй поверхности второй части (10b).
9. Держатель инструмента по п. 1, в котором, на первой части (10a) и на второй части (10b) расположены электрические контакты, при этом
когда первая часть (10a) соединена со второй частью (10b) в заблокированном положении, по меньшей мере одна точка (14) электрического контакта первой части (10a) электрически соединена с соответствующей по меньшей мере одной точкой (17) электрического контакта второй части (10b).
10. Держатель инструмента по любому из пп. 1-3, который выполнен с возможностью установки на руке робота.
11. Робот, содержащий руку, на которой установлен держатель инструмента по п. 10, и компьютер, выполненный с возможностью управления текучими средами и/или электрической энергией, подаваемыми к инструменту, присоединенному к держателю инструмента.
| US 6182491 B1, 06.02.2001 | |||
| УЗЕЛ СОЕДИНЕНИЯ ПЛОСКИХ ДЕТАЛЕЙ | 2004 |
|
RU2263829C2 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| СОЕДИНИТЕЛЬ ДЛЯ ПЛИТ, В ЧАСТНОСТИ ДВУХ ПЛИТ, РАСПОЛОЖЕННЫХ ПЕРПЕНДИКУЛЯРНО ДРУГ ДРУГУ | 2006 |
|
RU2319044C2 |
| СПОСОБЫ, СИСТЕМЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ДЛЯ АКТИВНОГО КОНТРОЛЯ, ЗАЩИТЫ ПАМЯТИ И ПРОВЕРКИ ЦЕЛОСТНОСТИ ЦЕЛЕВЫХ УСТРОЙСТВ | 2013 |
|
RU2615664C2 |
| DE 202016003670 U1, 29.06.2016 | |||
| WO 2017085239 A1, 26.05.2017. | |||

