Ј



| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Стыковочное устройство | 1990 |
|
SU1785894A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| ФОРМА ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 2003 |
|
RU2255858C2 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |



Использование: для стыковки частей руки робота. Сущность изобретения: устройство содержит стыковочный узел манипулятора, закрепленный на руке манипулятора, стыковочные узлы рабочих органов с закрепленными на них различными рабочими органами, например, схватами, сварочными горелками, приводными инструментами, электромагнитными схватами, дополнительными манипуляторами. Стыковочные узлы манипулятора и рабочих органов имеют стыковочные рабочие поверхности. Кроме того, стыковочное устройство промышленного робота содержит разъемные оптронные пары, состоящие из излучателей и приемников, электромагниты, магнитолроводы рабочих органов с выходными обмотками. Электромагнитны и магнитопроводы образуют разъемные трансформаторы со входными обмотками и выходными. 1 з.п.ф-лы, 11 ил.
Изобретение относится к области робототехники и может быть использовано в роботизированных технологических комплексах, где требуется частая смена рабочих органов, например, механических и электромагнитных схватов, сварочных горелок, приводных инструментов (сверлильных, зачистных и сборочных головок), дополнительных манипуляторов.
Цель изобретения - повышение надежности и упрощение стыковки.
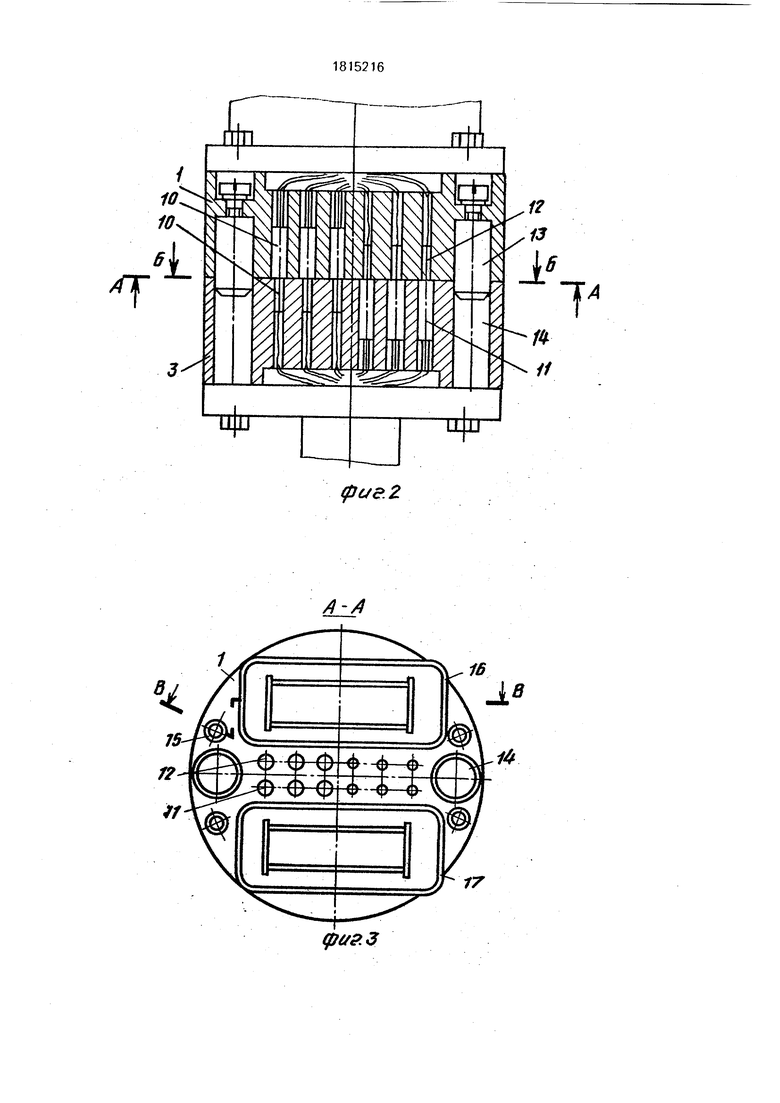
На фиг. 1 изображено стыковочное устройство промышленною робота, общий вид; на фиг. 2 - фронтальный разрез устройства по направляющим штифтам и оптрон- ным парам; на фип. 3 - разрез А-А на фиг. 2, по стыкуемой плоскости; на фиг. 4 - разрез Б-Б на фиг. 2, по стыкуемой плоскости; на
фиг. 5 - разрез В-В на фиг. 3; на фиг. 6 - схема устройства при работе в режиме максимального усилия стыковки без передачи энергии; на фиг. 7 - схема устройства при работе электромагнитное в режиме максимального усилия стыковки с передачей энергии; на фиг. 8 - график изменения тока на входных и выходных обмотках разъемных трансформаторов; на фиг. 9 - схема устройства при отключенных обмотках; на фиг, 10.- схема устройства при работе электромагнитов в режиме шунтирования (расстыковки).
Стыковочное устройство промышленного робота (см. фиг. 1) содержит стыковочный узел манипулятора 1,закрепленный на руке манипулятора 2, стыковочные узлы рабочих органов 3, с закрепленными на них
00
ел
ю
Ок
различными рабочими органами 4-8, например, схватами 4, сварочными горелками 5, приводными инструментами 6 (сверлильными, зачистными, сборочными головками и др.), электромагнитными схватами 7, дополнительными манипуляторами 8. Стыковочные узлы манипулятора 1 и рабочих органов 3 имеют стыковочные рабочие плоскости 9. Кроме того, стыковочное устройство промышленного робота содержит разъемные оптронные пары 10 (излучатели 11 и приемники 12, фиг. 2), закрепленные в отверстиях обоих стыковочных узлов манипулятора 1 и рабочих органов 3 для передачи информации от манипулятора 2 к рабочим органам 4-8 и наоборот, от - рабочих органов 4-8 к манипулятору 2 (см. фиг. 1). Стыковочный узел манипулятора 1 содержит направляющие штифты 13, а стыковочные узлы рабочих органов 3 имеют направляющие отверстия 14 под штифты 13. Стыковочное устройство (фиг. 3-5) имеет также стыкуемые пневматические и гидравлические линии 15, электромагниты 16. мэгнитопроводы 17 с выходными обмотками 18 (фиг. 4-7. 9, 10). Электромагниты 16 (см. фиг. 5т-7, 9, 10) содержат внутренние полюсники 19 и наружные охватывающие полюсники20, входные обмотки 21, закрепленные между внутренними 19 и наружными охватывающими 20 полюсниками стыковочного узла манипулятора 1. Причем корпуса стыковочных узлов манипулятора 1 и рабочих органов 3 выполнены из немагнитного материала. Внутренние полюсники 19 электромагнитов 16 содержат постоянные магниты 22. Полюсники 19 и 20 выполненыиз магнитопроводной электротехнической стали с низким коэффициентом остаточной намагниченности. Маг- нитопроводы 17 (см. фиг. 4-7, 9, 10) содержат дополнительные выходные обмотки 23, внутренние 19 и наружные 20 полюсники и закреплены в корпусах стыковочных узлов рабочих органов 3. Электромагниты 16 и магнитопроводы 17 образуют разъемные трансформаторы со входными обмотками 21 и выходными обмотками 18. Стыковочный узел манипулятора 1 (см. фиг. 6, 7, 9, 10) снабжен источниками постоянного 24 и переменного 25 напряжений и коммутатором 26. Причем, выходы источников напряжений 24 и 25 соединены со входом коммутатора 26, выходы коммутатора 26 - со входными обмотками 21 разъемных трансформаторов, а выходные дополнительные обмотки 23 разъемных трансформаторов снабжены отводами 27 для питания информационных излучателей 11, приемников 12 (см. фиг. 2), приводных
инструментов 6 (см. фиг. 1). электромагнитных схватов 7, дополнительных манипуляторов 8. Источники постоянного 24 и переменного 25 напряжений (см. фиг. 4-7,
9,10) через коммутатор 26 питают входные обмотки 21 пульсирующим напряжением. Источник постоянного напряжения 24 необходим для увеличения усилия стыковки и (в случае перемены полярности коммутатором
0 26) для шунтирования постоянного магнита 22 при расстыковке рабочих органов. Источник переменного напряжения 25 необходим для передачи энергии питания к рабочим органам. Пульсирующее напряжение (гра5 фик 28, фиг. 8) получается путем сложения напряжений от источников постоянного 24 и переменного 25 напряжений в коммутаторе 26.
Стыковочное устройство промышлен0 кого робота может иметь варианты с одним или несколькими разъемными трансформа торами (электромагнитами 16 и магнитол ро- : водами 17).
Для увеличения опорного момента ( -1,
5 где F - сила прижима стыковочного узла рабочего органа 3 к стыковочному узлу манипулятора 1,1- плечо силы) электромагниты 16 следует расположить по периферии стыковочных контактных (рабочих) плоско0 стей 9, что соответствует увеличению плеча силы.
Стыковочное устройство промышленного робота также может иметь вариант с раздельной передачей электрической энер5 гии (см. фиг. 11), когда имеется два типа электромагнитов 16 - с постоянными магнитами 22 и без постоянных магнитов. К электромагнитам 16 с постоянными магнитами 22 (как на фиг. 3,4. 6, 7, 9, 10) стыковочного
0 узла манипулятора 1 примыкают магнитопроводы 29 в виде пластин, закрепленные в стыковочных узлах рабочих органов 3. К электромагнитам 16с внутренними 19 и наружными 20 полюсниками без постоянных
5 магнитов примыкают магнитопроводы 17 (как на фиг. 3, 5-7,9, 10) с внутренними 19 и наружными 20 полюсниками и дополнительными обмотками 23. Причем магнитопроводы 29 также выполнены из
0 электротехнической стали с низким коэффициентом остаточной намагниченности. Электромагниты 16 без постоянных магнитов и магнитопроводы 17 образуют также разъемные трансформаторы, а электромаг5 ниты 16с постоянными магнитами 22 и маг- нитопроводами 29 .образуют держатели. Источник переменного напряжения 25 для конструктивного исполнения разъемных трансформаторов без постоянных магнитов (см. фиг. 11) питает входные обмотки 21
током, график 30 изменения которого также представлен на фиг. 8.
Стыковочное устройство промышленного робота функционирует следующим образом.
Стыковочный узел манипулятора 1 (см. фиг. 1) с помощью руки манипулятора 2 может стыковаться с любым из рабочих, органов 4-8 путем ввода направляющих штифтов 13 (см. фиг. 3) в соответствующие отверстия 14 стыковочных узлов рабочих органов 3 до смыкания рабочих плоскостей 9 (см. фиг 2). При этом состыковываются разъемные оптронные пары 10, т.е. излучатели Ни приемники 12 стыковочного узла манипулятора 1, устанавливаются соосно приемники 12 и излучателям 11 стыковочного узла рабочего органа 3 для передачи встречной информации. Также соосно состыковываются пневматические и гидравлические линии 15(см. фиг. 3-5). Стыковочный узел рабочего органа 3 притягивается к стыковочному узлу манипулятора 2 и удерживается посредством раздельного или совместного воздействия постоянных магнитов 22 и электромагнитов 16 через полюсники 19 и 20 на магнитопроводы 17.
Стыковочное устройство промышленного робота (см. фиг. 5-7, 9, 10) имеет несколько режимов работы: захват и удержание рабочего органа 4-8 (см. фиг. 1) электромагнитами 16 (см. фиг. 6) и постоянными магнитами 22, захват и удержание рабочего органа 4-8 (см. фиг. 1) электромагнитами 16 (см. фиг. 7) и постоянными магнитами 22 с передачей электрической энергии выходным обмоткам 18, захват и удержание рабочего органа 4-8 (см. фиг. 1) постоянными магнитами 22 (см. фиг. 9), отстыковка рабочего органа 4-8 (см. фиг. 1).
Захват и удержание рабочего органа 4- 8 электромагнитами 16 (см. фиг. 6) и постоянными магнитами 22 производится следующим образом. Стыковочный узел манипулятора 1 подводится к стыковочному узлу рабочего органа 3 (см. фиг. 5) в состоянии, когда после постоянных магнитов 22 нейтрализовано полем электромагнитное 16 (см. фиг. 10), питающихся от источника постоянного напряжения 24 через коммутатор 26. После смыкания стыковочных рабочих плоскостей 9 (фиг. 5) коммутатор 26 (см. фиг. 6) меняет полярность питающего постоянного напряжения обмоток 21 на противоположное. При этом направления магнитных потоков обмоток 21 совпадают с направлениями магнитных потоков постоянных магнитов 22. Суммарные магнитные потоки электромагнитов 16 и постоянных магнитов 22 притягивают магнитопроводы
17 стыковочного узла рабочего органа 3 {см. фиг. 5) и удерживают его.
Захват и удержание рабочего органа 4- 8 (см. фиг. 1) электромагнитами 16 (см. фиг. 5 7) и постоянными магнитами 22 с передачей электрической энергии выходным обмоткам 18 производится следующим образом. Стыковочные узлы манипулятора 1 и рабочего органа 3 (см. фиг. 5) сомкнуты. На об0 мотки 21 электромагнитов 16 через коммутатор 26 подается пульсирующее напряжение, содержащее постоянную и переменную составляющие согласно графика 28 (см. фиг. 8). Постоянная составляющая тока,
5 протекающая по обмоткам электромагнитов 16, вызывает магнитный поток, совпадающий с магнитным потоком постоянного магнита, усиливая его. Суммарные магнитные потоки электромагнитов 16 и постоянных
0 магнитов 22 притягивают магнитопроводы 17 стыковочного узла рабочего органа 3 (см. фиг. 5) и удерживают его. Переменная составляющая тока наводит ЭДС взаимоиндукции на выходных обмотках 18 и 23 (см.
5 фиг. 7) разъемного трансформатора и служит для передачи энергии рабочему органу. Через отводы 27 рабочим органам могут подаваться различные уровни напряжения. Захват и удержание рабочего органа 40 8(см. фиг. t)постоянными магнитами 22 (см. фиг. 9) производится следующим образом. Стыковочный узел манипулятора 1 подводится к стыковочному узлу рабочего органа 3 (см. фиг. 5} в состоянии, когда поле посто5 янных магнитов 22 нейтрализовано полем электромагнитов 16(см.фиг. 10). Послесмы- кания рабочих плоскостей 9 (см. фиг. 5} коммутатор 26 отключает питание электромагнитов 16. Магнитные потоки по0 стоянных магнитов 22 притягивают магнитопроводы 17 стыковочного узла рабочего органа 3 (см. фиг. 5) и удерживают его. Качества этого режима проявляются в случае аварийного отключения электроэнергии.
5 Отстыковка рабочего органа 4-8 (см. фиг. 1) производится за счет подачи питающего напряжения обратной полярности от источника постоянного напряжения 24 (см. фиг. 10) через коммутатор 26 на входные
0 обмотки 21. Протекающий по обмоткам 21 электромагнитов 16 электрический ток вызывает магнитный поток, который нейтрализует магнитный поток постоянных магнитов 22. При этом электромагниты 16 стыковоч5 ногоузла манипулятора 1 (см. фиг. 1) больше не удерживают магнитопроводы 17 стыковочного узла рабочего органа 3 и расстыковка производится без усилий.
Вариант стыковочного устройства промышленного робота (см. фиг. 11) также работает в рассмотренных режимах, за исключением того, что от источника переменного напряжения 25 через коммутатор 26 на обмотки 21 электромагнитов 16 подается переменное напряжение согласно графика 30 (см. фиг. 8). Кроме того, можно увеличить усилие удержания магнитопроводов 17 за счет подачи пульсирующего напряжения на обмотки 21 согласно графика 28.
Бесконтактная передача информационных сигналов и силовой электроэнергии позволяет улучшить помехозащищенность и повысить надежность передачи. Применение магнитной фиксации позволяет упростить процесс стыковки за счет уменьшения длины направляющих штифтов и, соответственно, хода стыковки, сведения времени фиксации до минимума, отсутствия усилия со стороны руки промышленного робота на рабочий орган при стыковке и расстыковке и отсутствия необходимости фиксации рабочего органа в осевом направлении при стыковке и расстыковке.
Применение магнитной фиксации стыковочных узлов позволяет упростить конструкцию устройства за счет: отсутствия механической фиксации, перемещения направляющих штифтов в стыковочный узел манипулятора и сокращения общего числа штифтов, отсутствия зацепных конструктивов в направляющих штифтах, корпусах стыковочных узлов, а также в магазинах схватов из-за ликвидации осевых усилий в процессе стыковки и расстыковки.
Формула изобретения
узлах, при этом на стыковочном узле манипулятора закреплены электромагниты, подключенные к источнику напряжения, отличающееся тем, что, с целью повышения надежности и упрощения стыковки, оно
снабжено оптронными парами для передачи сигналов электрических цепей, приемники и излучатели которых установлены на соответствующих узлах, при этом на стыковочном узле рабочего органа закреплены
магнитопроводы с обмотками, имеющими возможность образования при стыковке с соответствующими магнитопроводами электромагнитов замкнутых магнитных цепей трансформаторов, причем магнитопроводы электромагнитов дополнительно содержат постоянные магниты, кроме того, электромагниты имеют возможность подключения посредством введенного коммутатора к источнику постоянного и/или
переменного напряжения.
2зл&
91Z518L
9-9
9US181
/ ;
/
| Патент ФРГ № 33409112 | |||
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
