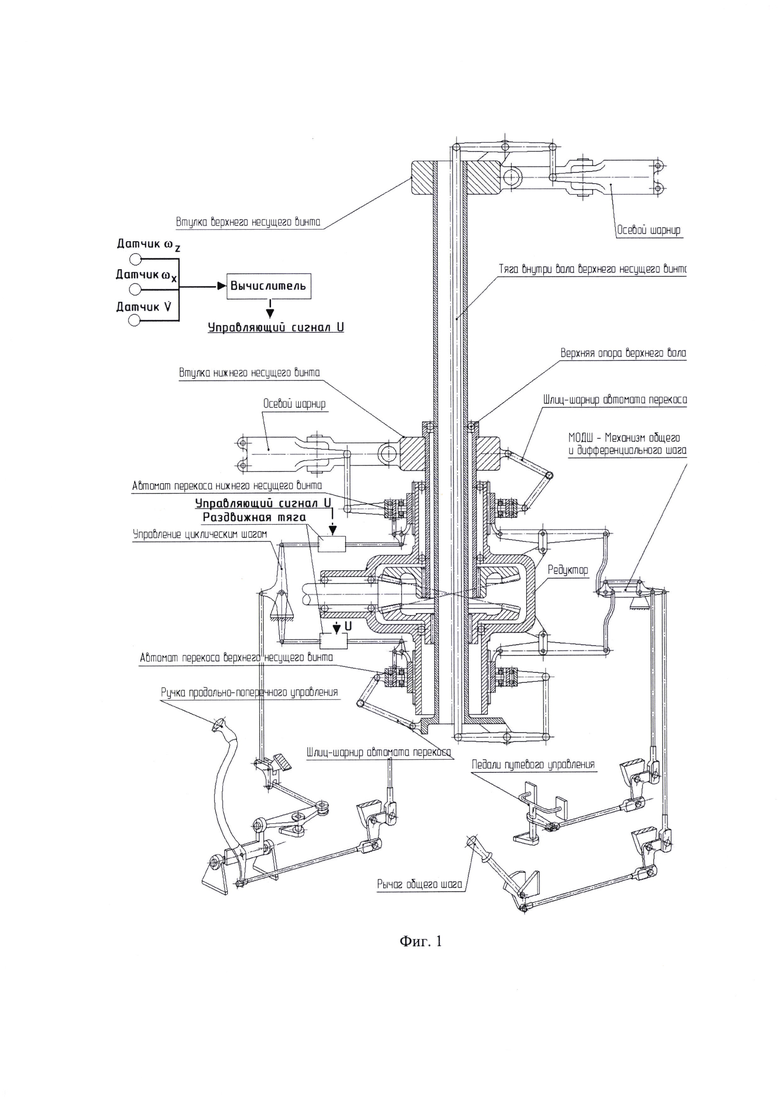
Изобретение относится к авиационной технике и касается систем соосных несущих винтов винтокрылых летательных аппаратов. Колонка соосного вертолета, представляющая собой двухвинтовую несущую систему с зеркальным расположением автоматов перекоса, содержит управляемую раздвижную тягу в канале крена (фиг. 1). Техническим результатом является повышение безопасности по сближению лопастей верхнего и нижнего несущих винтов.
Известна колонка сверхлегкого соосного вертолета (Патент №2155702 от 10.09.200), представляющая собой двухвинтовую несущую систему с зеркальным расположением автоматов перекоса, которая содержит редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов. Также система содержит цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса. При этом внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора, введена полая неподвижная колонна. Внутри колонны проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса верхнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны. Элементы управления верхним винтом установлены на валу и на колонне так, что перемещение вала вниз происходит без демонтажа системы управления или редуктора, а приведение в рабочее состояние - без дополнительной регулировки системы управления.
В таком устройстве не исключено опасное сближение лопастей, вплоть до их схлеста, в случае энергичного маневрирования, потери оборотов на большой скорости или вследствие неблагоприятного сочетания факторов полета, увеличивающих сближение лопастей несущих винтов.
Как известно [Э.А. Петросян. Аэродинамика соосного вертолета. М.: Полигон - пресс, 2004 г. с. 816], при маневрировании соосного вертолета с несущими винтами, вращающимися в разных направлениях, в определенных азимутах нахождения лопастей может происходить их сближение. Для исключения этого явления вводятся ограничения по угловым скоростям маневрирования соосного вертолета и обеспечение достаточного вертикального разноса винтов, гарантирующего достаточный зазор между лопастями.
Для уменьшения риска опасного сближения лопастей обеспечивают достаточную высоту колонки, что влечет за собой увеличение габаритов вертолета и нагрузок на редуктор и узлы крепления.
Задача, решаемая в заявляемом техническом решении, заключается в автоматическом обеспечении достаточных зазоров между лопастями верхнего и нижнего несущих винтов во всех режимах полета винтокрылого летательного аппарата.
Технический результат, достигаемый при реализации предлагаемого изобретения, позволяет без вмешательства летчика и ограничения режимов маневрирования избегать опасного сближения несущих винтов. Благодаря этому достигается заявленный технический результат:
1) повышение безопасности полета соосного вертолета;
2) уменьшение высоты колонки, что влечет за собой уменьшение нагрузок на узлы крепления колонки и улучшение транспортабельности и хранения вертолета вследствие уменьшения его габаритов по высоте.
При этом не предъявляется высоких требований к отказобезопасности системы предупреждения сближения лопастей НВ. В случае ее отказа соосный вертолет может продолжать полет с установленными ограничениями по маневрированию и скорости.
Существенными признаками заявляемой конструкции колонки соосного несущего винта, общими с прототипом, являются: двухвинтовая несущая система с зеркальным расположением автоматов перекоса, которая содержит редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов. Также система содержит цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса. При этом внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора, введена полая неподвижная колонна. Внутри колонны проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса верхнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны. Элементы управления верхним винтом установлены на валу и на колонне так, что перемещение вала вниз происходит без демонтажа системы управления или редуктора, а приведение в рабочее состояние - без дополнительной регулировки системы управления.
Признаком заявляемого изобретения, отличным от прототипа, является дополнительная раздвижная тяга между автоматами перекосов или дифференциальной качалки в канале крена, работающей по установленным алгоритмам по сигналам автоматического устройства от сигналов трех датчиков: угловых скоростей в канале тангажа ωz и крена ωx и воздушной скорости V. Работающая по установленным алгоритмам раздвижная тяга путем автоматического отклонения тарелок автоматов перекоса в канале крена предотвращает опасное сближение лопастей несущих винтов.
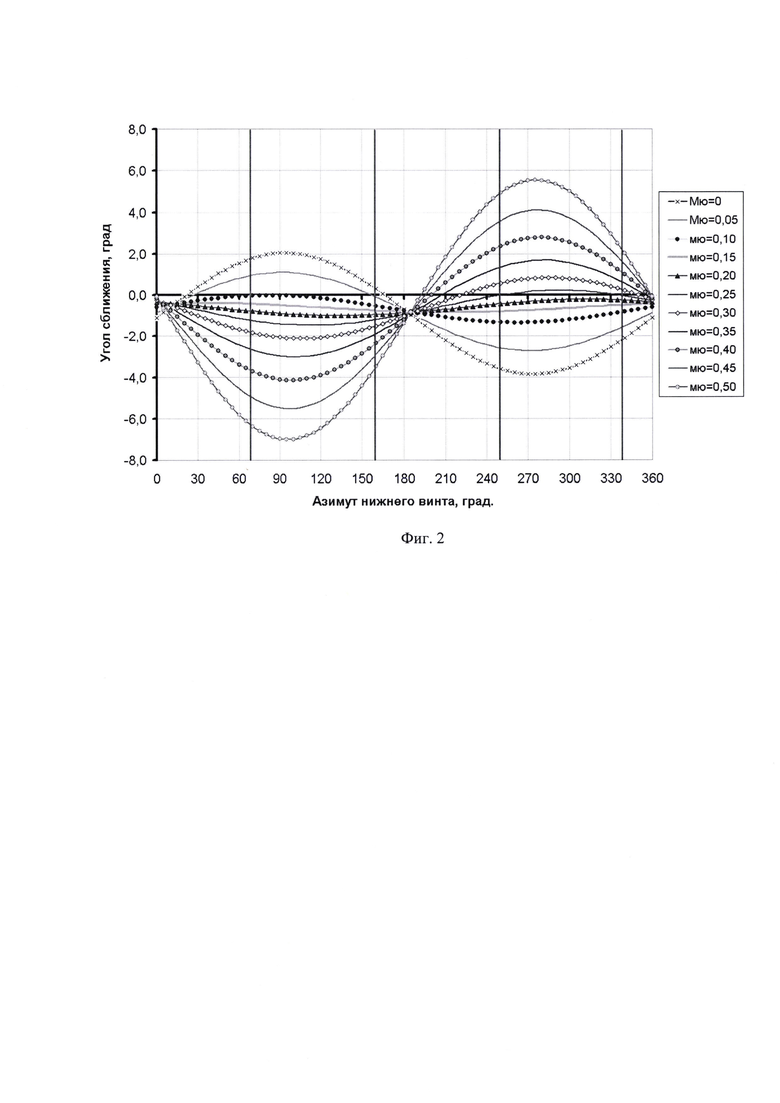
Сущность изобретения поясняется схемой и графиком, на которых изображена принципиальная схема колонки, оснащенной устройством предотвращения сближения лопастей несущих винтов и приведена зависимость углов сближения лопастей винтов Δβсближения от азимута нижнего несущего винта ΨΗ для ряда коэффициентов режима работы винта μ≈V/ωR сверхлегкого соосного вертолета, без предлагаемого устройства, в установившемся горизонтальном полете [Э.А. Петросян. Аэродинамика соосного вертолета. М.: Полигон - пресс, 2004 г. с. 816], а именно:
Фиг. 1 - Принципиальная схема колонки несущих винтов соосного вертолета;
Фиг. 2 - Зависимость углов сближения лопастей винтов от азимута нижнего несущего винта.
Здесь:
μ - коэффициент режима работы винта,
V - скорость полета,
ω - угловая скорость вращения винтов,
R - радиус несущего винта.
Винты сближаются при Δβсближения<0.
Верхний несущий винт вращается по часовой стрелке при виде сверху, нижний - против.
Красной линией на графике показаны азимуты физического сближения лопастей. Таким образом, достаточно отклонять тарелки автоматов перекосов винтов только по крену.
Для исключения сближения лопастей верхнего и нижнего винтов сверхлегкого соосного вертолета по скорости горизонтального полета необходимо отклонять верхний несущий винт вправо, нижний несущий винт - влево по закону:
Δb1≈3,6°-0,035V, где V - в км/ч;
где Δb1 - угол отклонения тарелки автомата перекоса по крену.
Если Δb1 становится<0, то необходимо отклонять верхний несущий винт влево, нижний несущий винт - вправо.
Для предупреждения опасного сближения лопастей верхнего и нижнего винтов сверхлегкого соосного вертолета при кабрировании винты необходимо отклонять автоматы перекосов (верхний несущий винт вправо, нижний несущий винт - влево) только по крену по алгоритму:
Δb1≈2,2°×ωz (рад/с),
где ωz - угловая скорость кабрирования, град/с.
При крене вправо критичным является сближение лопастей несущего винта слева.
Для предупреждения опасного сближения лопастей верхнего и нижнего винтов сверхлегкого соосного вертолета при крене вправо необходимо отклонять нижний несущий винт вправо, нижний несущий винт - влево по закону:
Δb1≈5,9°×ωx (рад/с),
где ωx - угловая скорость крена, град/с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| ДВУХВИНТОВАЯ СООСНАЯ НЕСУЩАЯ СИСТЕМА С ЗЕРКАЛЬНЫМ РАСПОЛОЖЕНИЕМ АВТОМАТОВ ПЕРЕКОСА | 2007 |
|
RU2383470C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2417922C2 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |
Изобретение относится к авиационной технике, в частности к конструкциям соосных несущих систем винтокрылых летательных аппаратов. Колонка соосных несущих винтов с зеркальным расположением автоматов перекоса содержит редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, цепи управления общим, дифференциальным и циклическим шагом каждого винта, два автомата перекоса. Внутри вращающегося вала верхнего винта имеется полая неподвижная колонна, а внутри колонны проходят тяги управления циклическим шагом. В верхней части колонны установлен автомат перекоса нижнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны. В состав управления колонки соосных несущих винтов введена раздвижная тяга между автоматами перекосов в канале крена, изменяющая свою длину в зависимости от режима полета винтокрылого летательного аппарата. Обеспечивается повышение безопасности посредством предотвращения опасного сближению лопастей верхнего и нижнего несущих винтов. 2 ил.
Колонка соосных несущих винтов, представляющая собой двухвинтовую несущую систему с зеркальным расположением автоматов перекоса, которая содержит редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, содержащая цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса, при этом внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора, введена полая неподвижная колонна, а внутри колонны проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса нижнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны, при этом элементы управления верхним винтом не соединены с валами, отличающаяся тем, что в состав управления колонки соосных несущих винтов введена раздвижная тяга между автоматами перекосов в канале крена, изменяющая свою длину в зависимости от режима полета винтокрылого летательного аппарата с соосным несущим винтом.
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| EP 3090944 B1, 24.06.2020 | |||
| FR 3095189 A1, 23.10.2020. | |||

