Изобретение относится к авиационной технике, а именно к системам несущих винтов летательных аппаратов.
Системы известных соосных несущих винтов вертолетов состоят из редуктора с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, цепи управления каждым из несущих винтов, механизмы общего, дифференциального и циклического шага (авторское свидетельство Н.И.Камова №83999 с приоритетом 11.09.46; патенты US 3592559 А, 13.07.1971; US 3912199 A, 14.10.1975; патент RU 2155702 10.09.2000; описание системы соосных несущих винтов Суриков Н.Ф. и др. Вертолет КА-26. М.: Транспорт, 1982, с.107-110).
У всех известных несущих систем соосных вертолетов верхний несущий винт вынесен вверх на расстояние, равное или более 0,2 R - радиуса винта для исключения возможности соударения лопастей верхнего и нижнего винтов, вращающихся в разных направлениях. Вращающиеся детали с большой кинетической энергией автоматов перекоса вертолетов КА-26, КА-32 вынесены за пределы кабины вертолета. Верхний несущий винт вынесен высоко вверх и не подлежит уборке в нерабочем состоянии, что приводит к необходимости демонтировать главный редуктор при транспортировании вертолета.
Система двух соосных несущих винтов вертолета «Роторфлай» (патент РФ №2155702 от 10.09.2000, МПК В64С 27/32) позволяет уменьшить габаритные размеры соосного вертолета по высоте при стояночном положении или транспортировке.
Наиболее близким по технической сущности аналогом является система двух соосных несущих винтов вертолета «Роторфлай», содержащая редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, автомат перекоса верхнего несущего винта расположен в нижней части корпуса редуктора, вал верхнего винта выполнен с возможностью своего осевого перемещения относительно редуктора, автомат перекоса нижнего несущего винта расположен в верхней части корпуса редуктора и связан тягами с осевыми шарнирами лопастей нижнего несущего винта.
Однако уменьшение габаритного размера по высоте обеспечивается за счет того, что автомат перекоса верхнего несущего винта расположен в нижней части корпуса редуктора, содержит вращающиеся детали с большой кинетической энергией вблизи кабины вертолета, что представляет опасность для жизни пилотов и пассажиров и не допускается нормами летной годности АП-29. Кроме этого введены вращающиеся вместе с валом верхнего винта тяги, их число определяется числом лопастей. Увеличение числа лопастей винта приводит к увеличению вращающихся тяг, следовательно, к увеличению диаметра внутреннего вала и массы несущей системы. Кроме того, наличие вращающихся вместе с валом верхнего винта длинных тяг затрудняет балансировку вала.
Таким образом, известные системы двух соосных винтов либо не обеспечивают возможности уменьшения габаритного размера по высоте соосного вертолета при стояночном положении или при его транспортировании без демонтажа системы управления или редуктора, либо не позволяют вынести вращающиеся детали системы управления лопастями несущих соосных винтов за пределы кабины, что снижает безопасность находящихся в кабине пилотов и пассажиров. Увеличение числа вращающихся деталей системы управления винтами затрудняет балансировку валов.
Решаемой задачей предлагаемого изобретения является создание эффективной несущей системы двух соосных винтов, технический результат от использования которого заключается:
- в обеспечении возможности выноса вращающихся деталей с большой кинетической энергией системы управления лопастями несущих винтов за пределы кабины;
- уменьшении числа вращающихся деталей системы управления винтами при сохранении согласованного управления общим, дифференциальным и циклическим шагом.
- в обеспечении возможности уменьшения габаритного размера по высоте соосного вертолета при стояночном положении или при его транспортировке без демонтажа системы управления или редуктора;
- в облегчении работ по балансировке вращающихся роторов несущей системы за счет снижения числа вращающихся вместе с ротором деталей.
Технический результат достигается тем, что тяги управления циклическим шагом верхнего винта установлены внутри полой колонны, проходящей внутри вала верхнего винта, скользящее кольцо автомата перекоса верхнего винта, связанное тягой с дополнительным скользящим кольцом, при этом кольца установлены на неподвижной полой колонне, вверху и внизу колонны соответственно, что позволяет:
- вынести вращающиеся с большой кинетической энергией детали системы управления лопастями винтов за пределы кабины;
- уменьшить число вращающихся деталей системы управления лопастями винтов;
- осуществить процесс складывания несущей системы путем осевого перемещения вала верхнего несущего винта вниз относительно ступицы приводной шестерни редуктора вместе с колонной до упора его втулки о втулку нижнего несущего винта без демонтажа системы управления;
- приведение несущей системы в исходное рабочее положение не требует какой-либо ее регулировки, поскольку неподвижная колонна с тягами управления и установленным на нем автоматом перекоса верхнего винта жестко фиксируется шлицами относительно редуктора в рабочем положении;
- увеличение числа лопастей винтов не влечет за собой увеличения числа тяг, проходящих внутри неподвижной колонны.
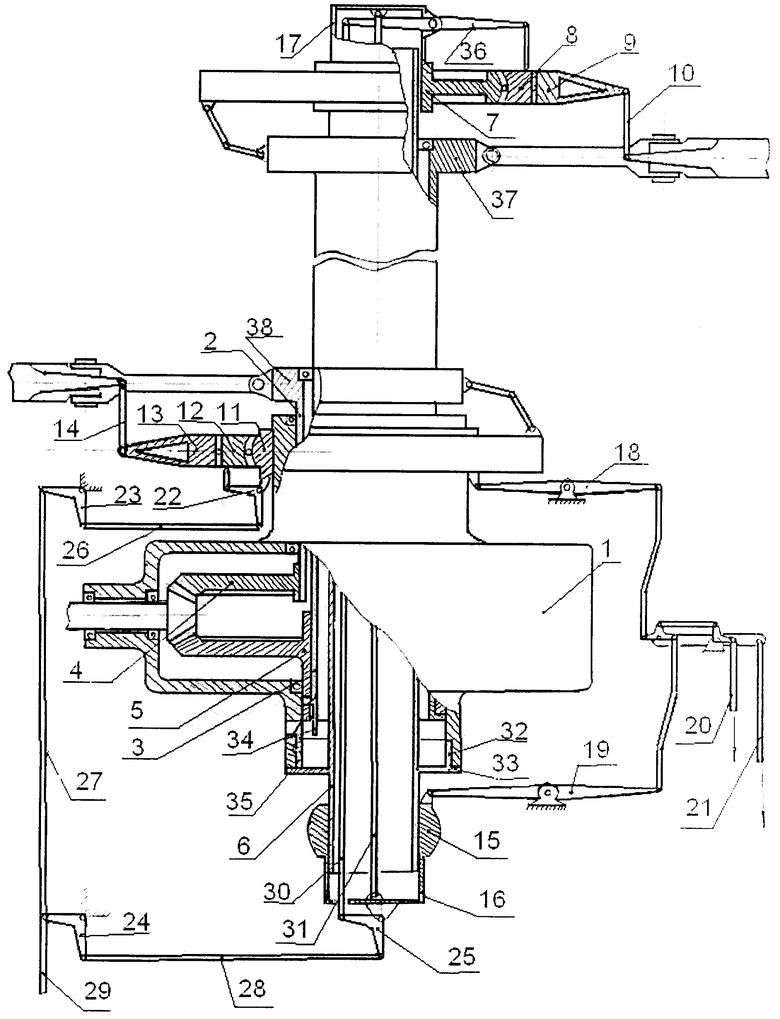
На чертеже представлены основные элементы двухвинтовой соосной несущей системы с зеркальным расположением автоматов перекоса. В предлагаемом изобретении внутри вращающегося вала верхнего винта установлена полая колонна (6), в верхней ее части находится автомат перекоса (АП) верхнего винта, состоящий из скользящего кольца (7), невращающегося кольца(8) и вращающегося кольца АП (9), связанного тягами (10) с осевыми шарнирами лопастей верхнего винта, закрепленных на втулке (37). Скользящее кольцо верхнего винта (7) связано тягой (31) с дополнительным скользящим кольцом (15), установленным в нижней части колонны (6). Автомат перекоса нижнего винта, состоящий из скользящего кольца (11), невращающегося кольца (12) и вращающегося кольца (13) АП установлен в верхней части редуктора (1) и связан тягами (14) с осевыми шарнирами лопастей нижнего несущего винта, закрепленных на втулке (38). С помощью качалок (18) и (19) нижнее и дополнительное скользящее кольца связаны с цепью управления общим (21) и дифференциальным (20) шагом. Управление циклическим шагом (29) лопастей верхнего и нижнего винтов осуществляется через систему качалок (22, 23, 24, 25, 36) и тяг (26, 27, 28, 30). Качалки (25) и (36) установлены на корпусах (16) и (17), жестко связанных с дополнительным (15) и верхним (7) скользящими кольцами соответственно. Неподвижная колонна с установленным на нем автоматом перекоса верхнего винта жестко фиксируется относительно редуктора в рабочем положении шлицами (32), буртиком (33) неподвижной колонны (6) и пружинными фиксаторами (34) и (35), которые устраняют возможность осевого перемещения вала верхнего винта (3) в рабочем положении. Ступица шестерни (4) и вал нижнего винта (2) установлены с посадкой, исключающей осевое смещение вала (2).
Двухвинтовая соосная несущая система с зеркальным расположением автоматов перекоса работает следующим образом. Вал верхнего винта (3) установлен с ходовой посадкой со шлицевым соединением в полой ступице шестерни (5). При освобождении фиксаторов (34), (35) через специальное окно в корпусе редуктора вал (3) перемещается вниз относительно ступицы (5) вместе с полой колонной (6) и автоматом перекоса верхнего винта, не нарушая регулировку системы управления верхним винтом. Для обеспечения возможности опускания вала верхнего винта (3) вместе с колонной (6) необходимо отсоединить качалку (19) от дополнительного скользящего кольца (15) и качалку(25) от тяги (28). В рабочем положении эти качалки необходимо соединить. Неподвижная колонна с установленным на ней автоматом перекоса верхнего винта жестко фиксируется относительно редуктора в рабочем положении шлицами (32), буртиком (33) неподвижной колонны (6) и пружинными фиксаторами (34) и (35), которые устраняют возможность осевого перемещения вала верхнего винта (3) в рабочем положении. Поэтому после приведения несущей системы в рабочее положение не требуется какой-либо регулировки системы управления винтами. При перемещении дополнительного скользящего кольца (15) и связанного с ним тягой (31) скользящего кольца АП верхнего винта (7) обеспечивается согласованное управление общим шагом лопастей нижнего и верхнего винтов, а также дифференциальным шагом. Согласованное управление циклическим шагом верхнего и нижнего винтов обеспечивается цепочкой тяг (26, 27, 28, 30) и качалок (22, 23, 24, 25, 36). Такая цепочка необходима для управления по двум каналам управления: тангажу и по крену. На чертеже показано управление циклическим шагом только по одному каналу, по второму каналу система управления аналогичная.
Преимущества предлагаемого изобретения по сравнению с известными аналогами:
- изобретение решает задачу обеспечения возможности выноса вращающихся деталей системы управления лопастями несущих соосных винтов за пределы кабины, что повышает безопасность для пилотов и пассажиров;
- позволяет уменьшить габаритные размеры по высоте соосного вертолета при стояночном положении или при его транспортировании без демонтажа системы управления, что упрощает обслуживание соосного вертолета при эксплуатации;
- по сравнению с прототипом увеличение числа лопастей винтов не требует увеличения числа тяг, проходящих внутри полой колонны;
- отсутствие внутри вала верхнего винта тяг, вращающихся вместе с ним, облегчает балансировку валов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СБЛИЖЕНИЯ ЛОПАСТЕЙ НЕСУЩИХ ВИНТОВ СООСНОГО ВЕРТОЛЕТА | 2021 |
|
RU2772464C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
Изобретение относится к авиационной технике, а именно к системам несущих винтов летательных аппаратов. Двухвинтовая несущая система с зеркальным расположением автоматов перекоса содержит редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов. Также система содержит цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса. При этом внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора, введена полая неподвижная колонна. Внутри колонны проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса верхнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны. Элементы управления верхним винтом установлены на валу и на колонне так, что перемещение вала вниз происходит без демонтажа системы управления или редуктора, а приведение в рабочее состояние - без дополнительной регулировки системы управления. Технический результат направлен на создание безопасной и эффективной несущей системы двух соосных винтов, а также на обеспечение возможности уменьшения габаритного размера по высоте соосного вертолета при стояночном положении или при его транспортировке без демонтажа системы управления или редуктора. 1 ил.
Двухвинтовая несущая система с зеркальным расположением автоматов перекоса, содержащая редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, содержащая также цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса, отличающаяся тем, что внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора с целью уменьшения габаритных размеров в нерабочем состоянии, введена полая неподвижная колонна, внутри которой проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса верхнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны, причем элементы управления верхним винтом установлены на валу и на колонне так, что перемещение вала вниз происходит без демонтажа системы управления или редуктора, а приведение в рабочее состояние - без дополнительной регулировки системы управления.
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| US 3592559 A, 13.07.1971 | |||
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЛИСТОВОГО СТЕКЛА | 1992 |
|
RU2041789C1 |
| US 6086016 А, 18.12.1984. | |||

